
Control Design for Soft Transition for Landing Preparation of Light Compound-Wing Unmanned Aerial Vehicles Based on Incremental Nonlinear Dynamic Inversion

 ,
,
Abstract
:1. Introduction
1.1. Transition Phase for Compound-Wing UAVs
1.2. Implicit NDI, INDI
- A 6-DOF modeling and platform introduction for the prototype VtolA7.
- Design of guidance and control architecture for the longitudinal channels.
- The transition strategy design for landing preparation and MC simulations for robustness verification.
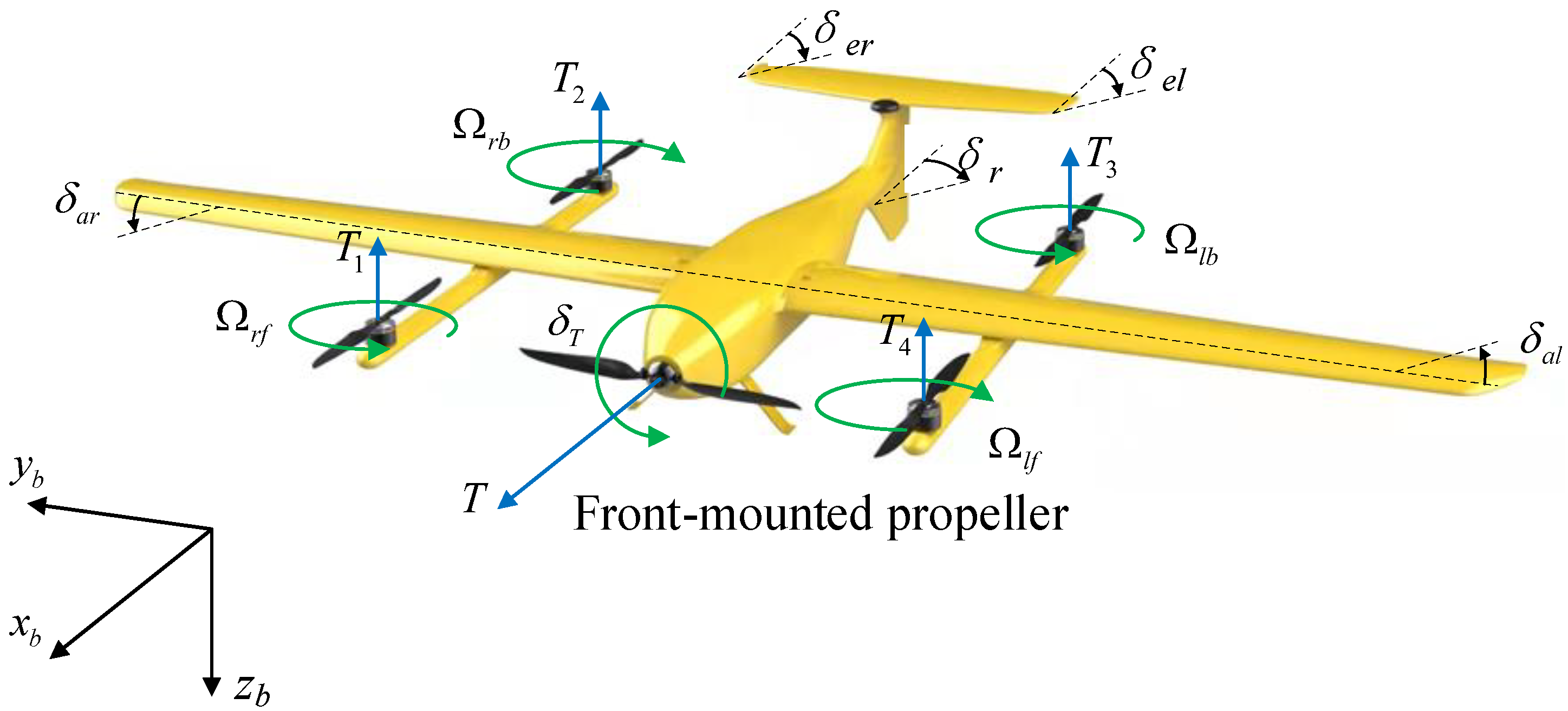
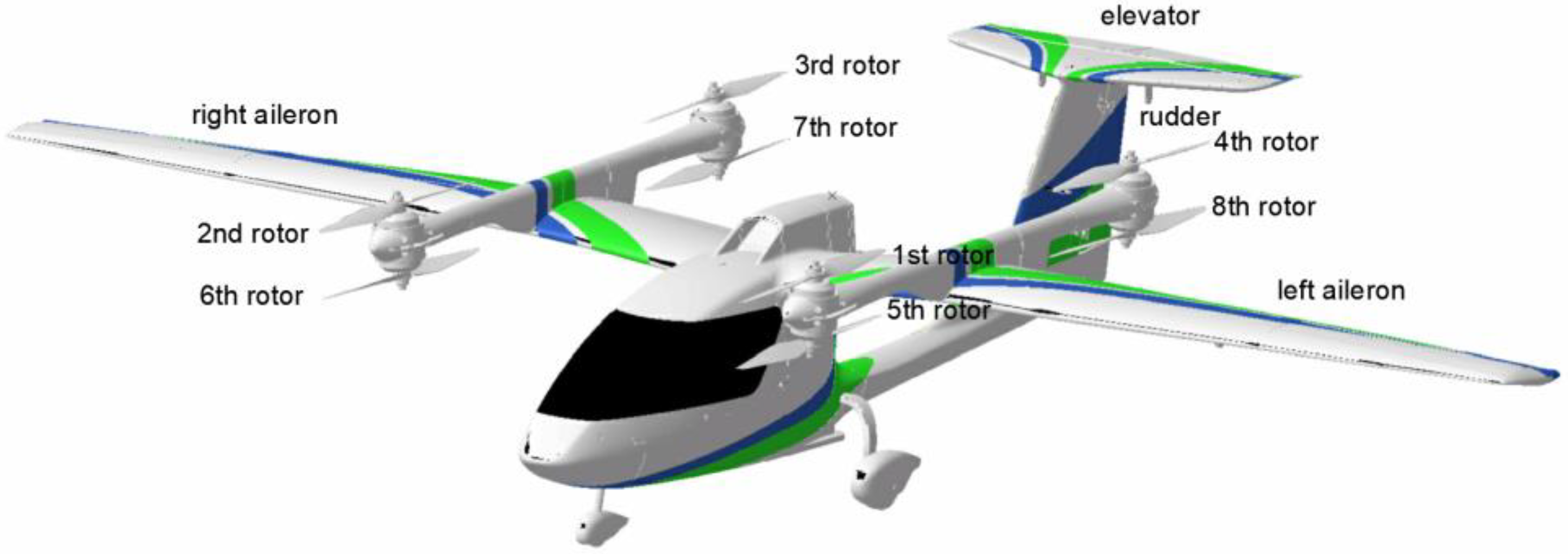
2. The UAV VtolA7
2.1. Platform Design and Operating Principle
2.2. Aircraft Dynamics Modeling
2.2.1. Aerodynamic Model
2.2.2. Six-DOF Equation
3. Control Design for Transition Phase
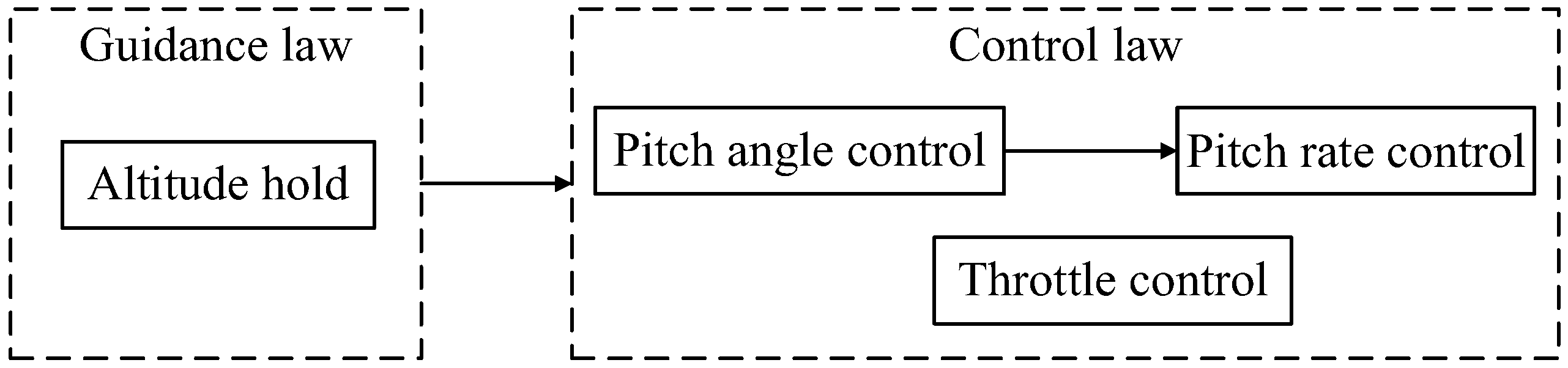
3.1. Guidance Law Design
3.1.1. Altitude— Channel
3.1.2. Altitude— Channel
3.2. Control Law Design
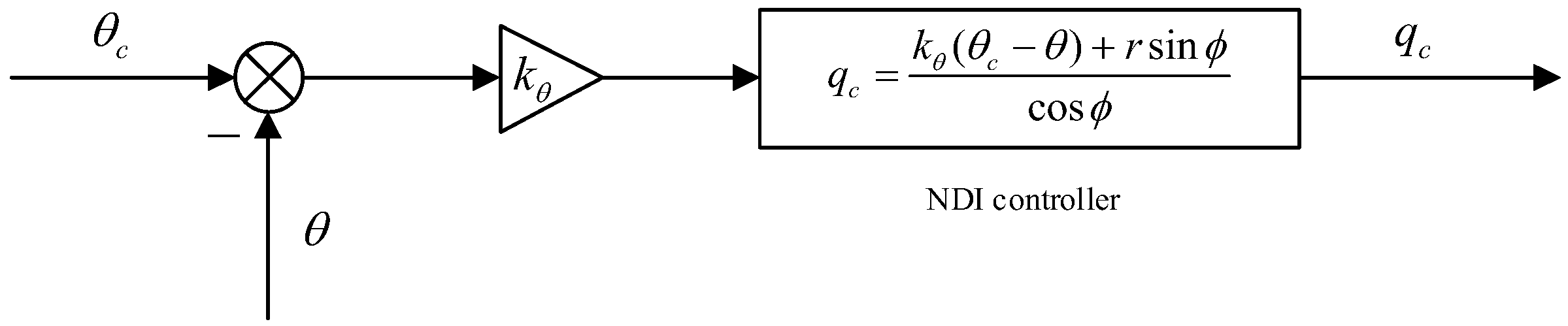
3.2.1. Pitch Angle Control
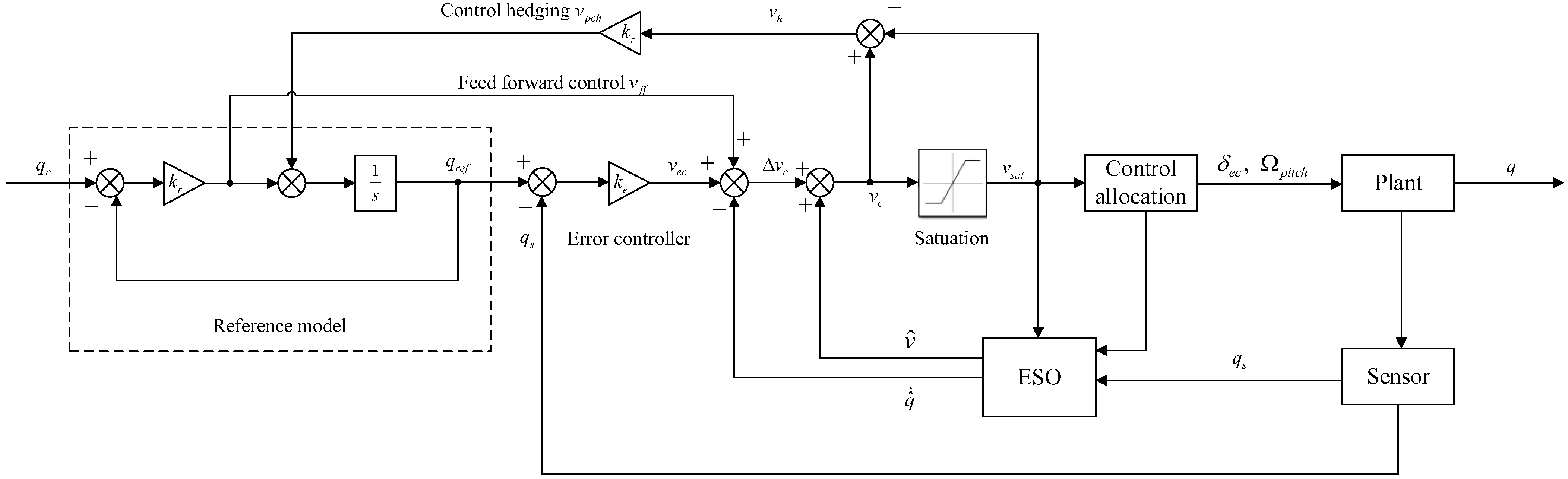
3.2.2. Pitch Angle Rate Control
- where the on-board model input can be calculated as
3.2.3. Throttle Control
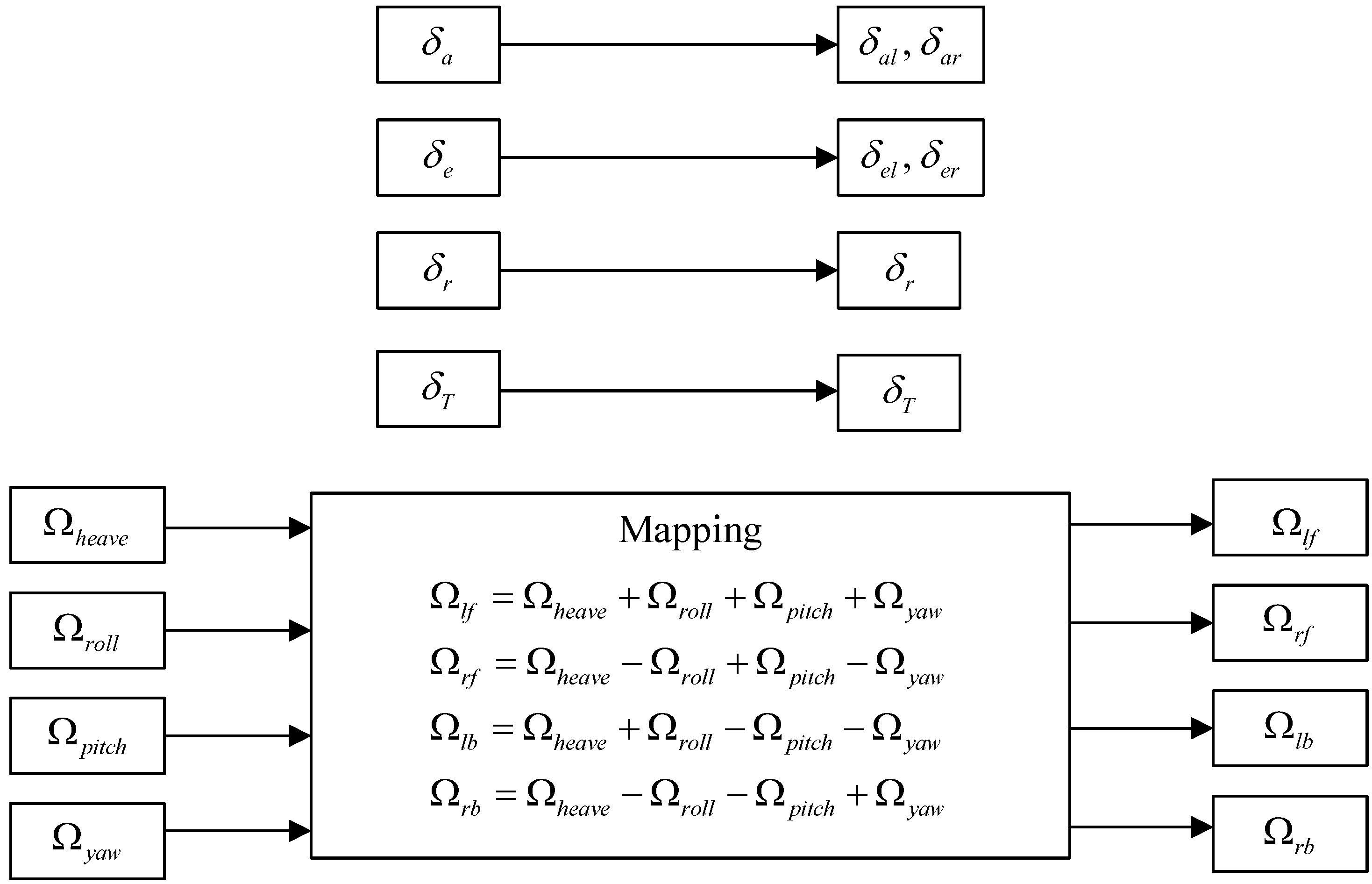
3.2.4. Lateral Directional Channel Control
3.3. Control Strategy for Soft Transition Design
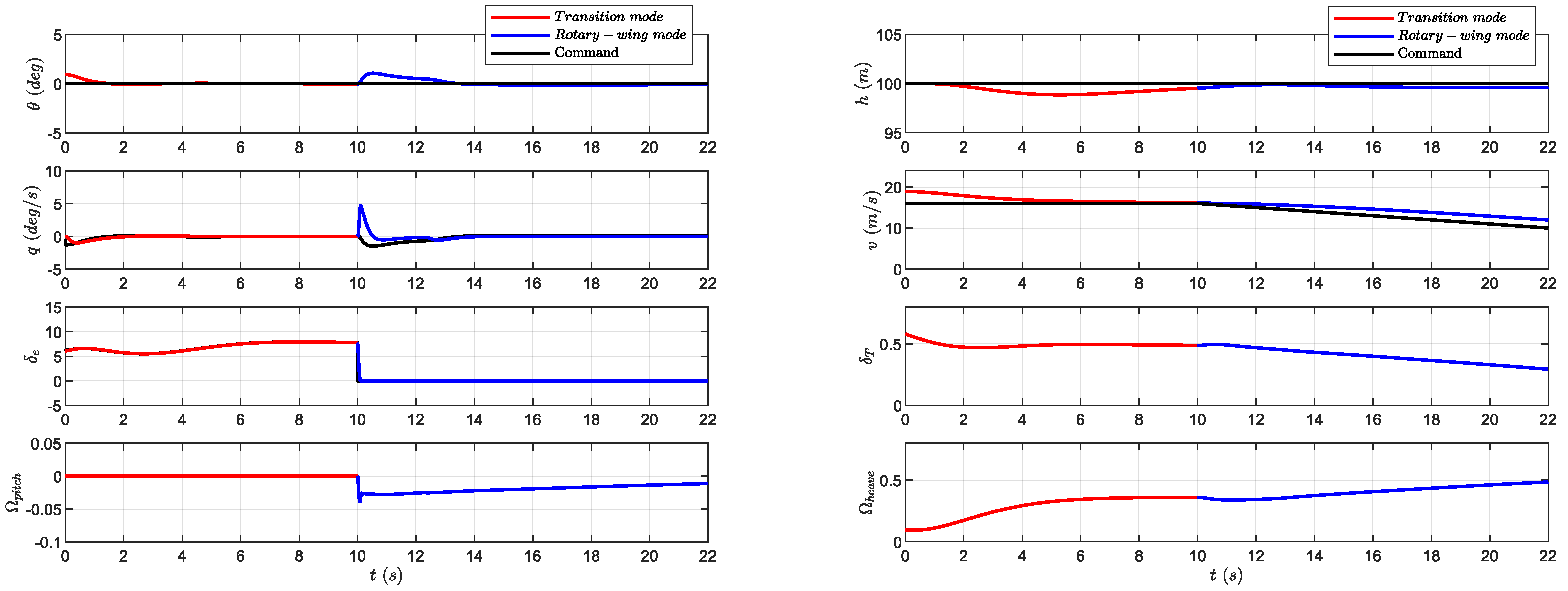
- For the height-pitch angle-pitch angle-rate loop, before the elevator stops controlling the pitch attitude, it starts the rotors in advance to replace the elevator to follow the commands related to altitude control. After the fixed-wing mode is switched to the switching mode for 10 s (or even shorter, 5 s), the UAV’s flight attitude reaches a stable state, and then switches to the rotary-wing mode so that the elevator is no longer participates in attitude control, thus realizing a smooth transition of mode switching.
- For the speed loop, during the switching mode, a deceleration signal is given (reducing from the cruise speed to the switching speed) to achieve the deceleration control of the transition phase.
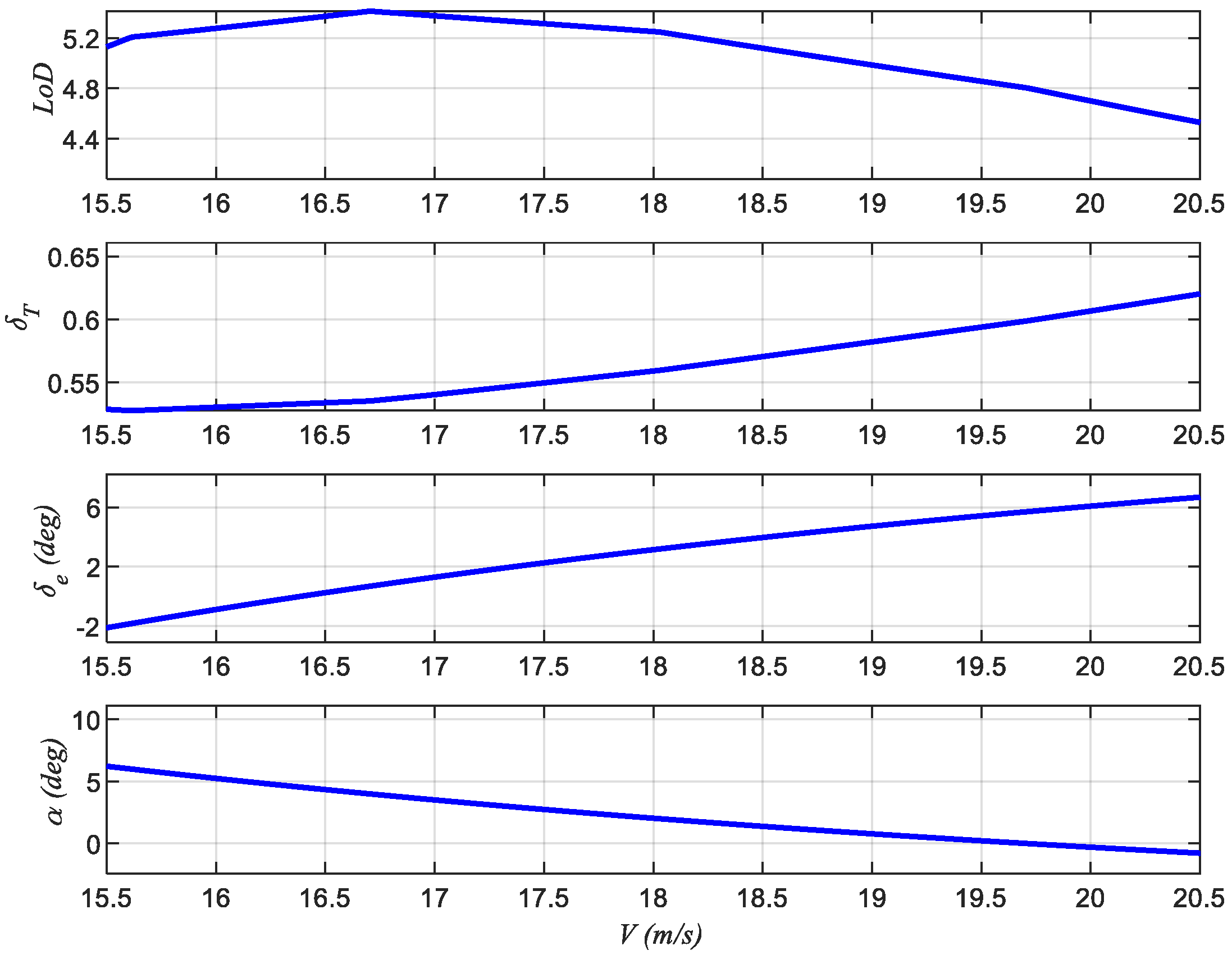
4. Performance Analysis of Deceleration Transition Phase for UAV
5. Nominal Simulation and Monte Carlo Shooting Simulation
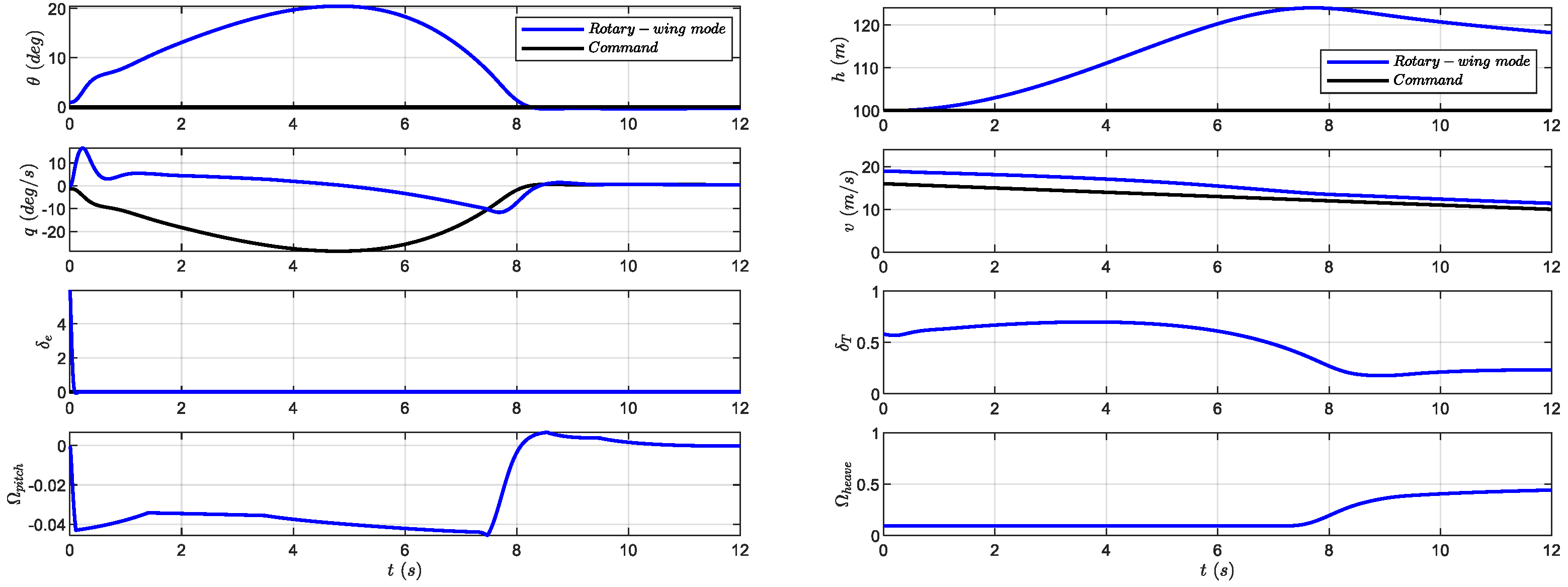
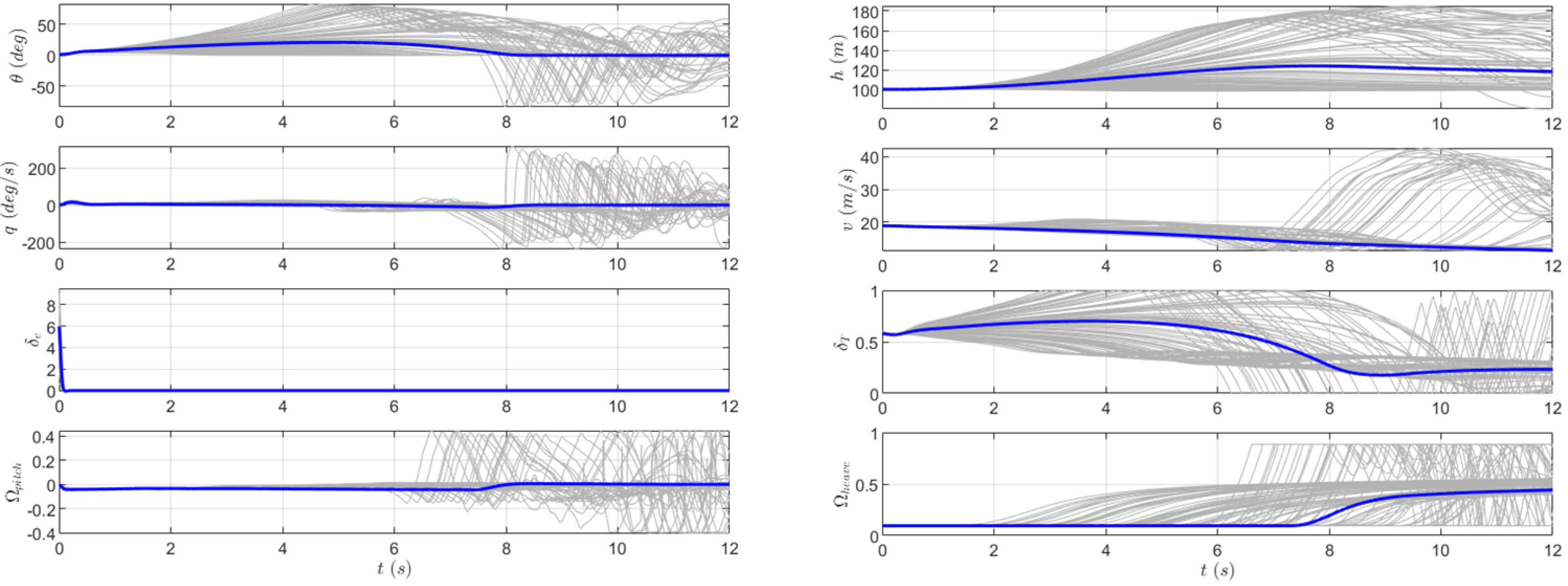
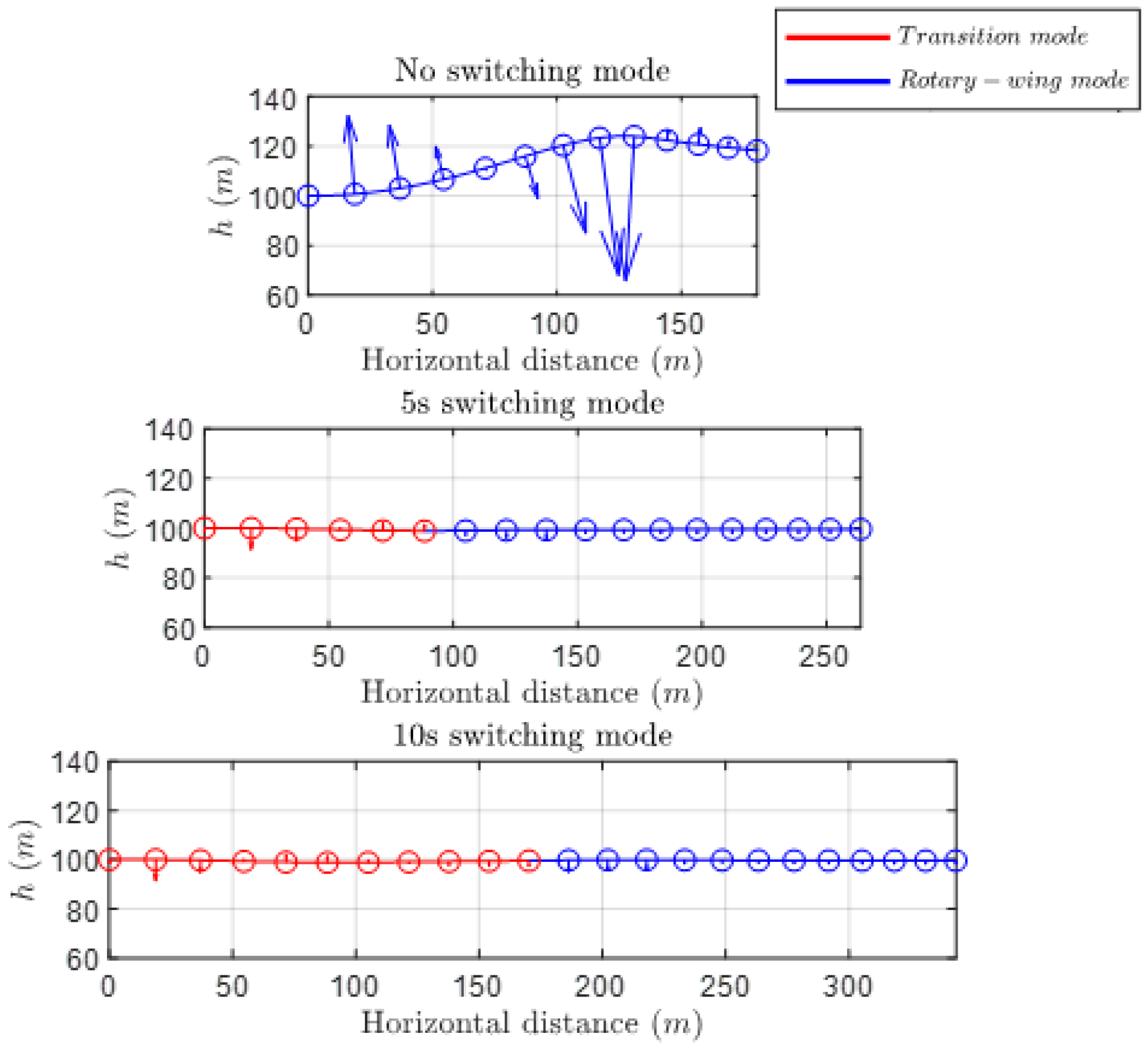
5.1. Simulation of Direct Switching
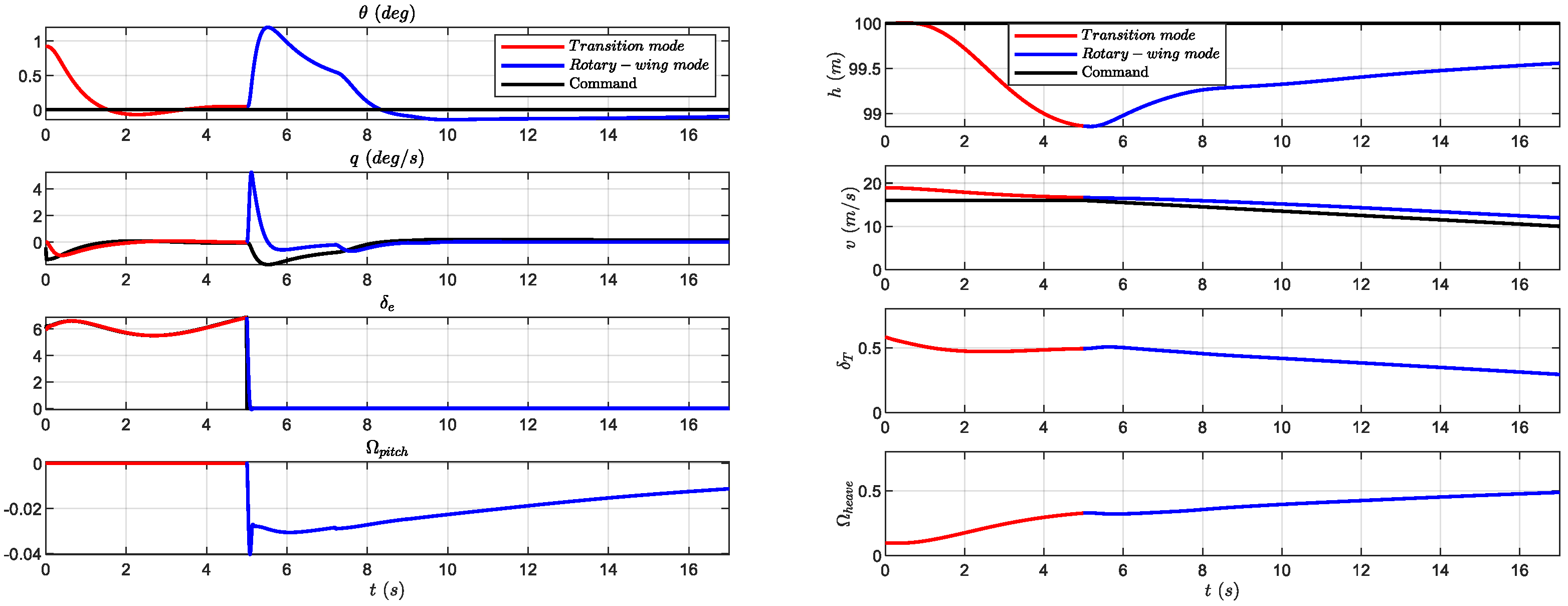
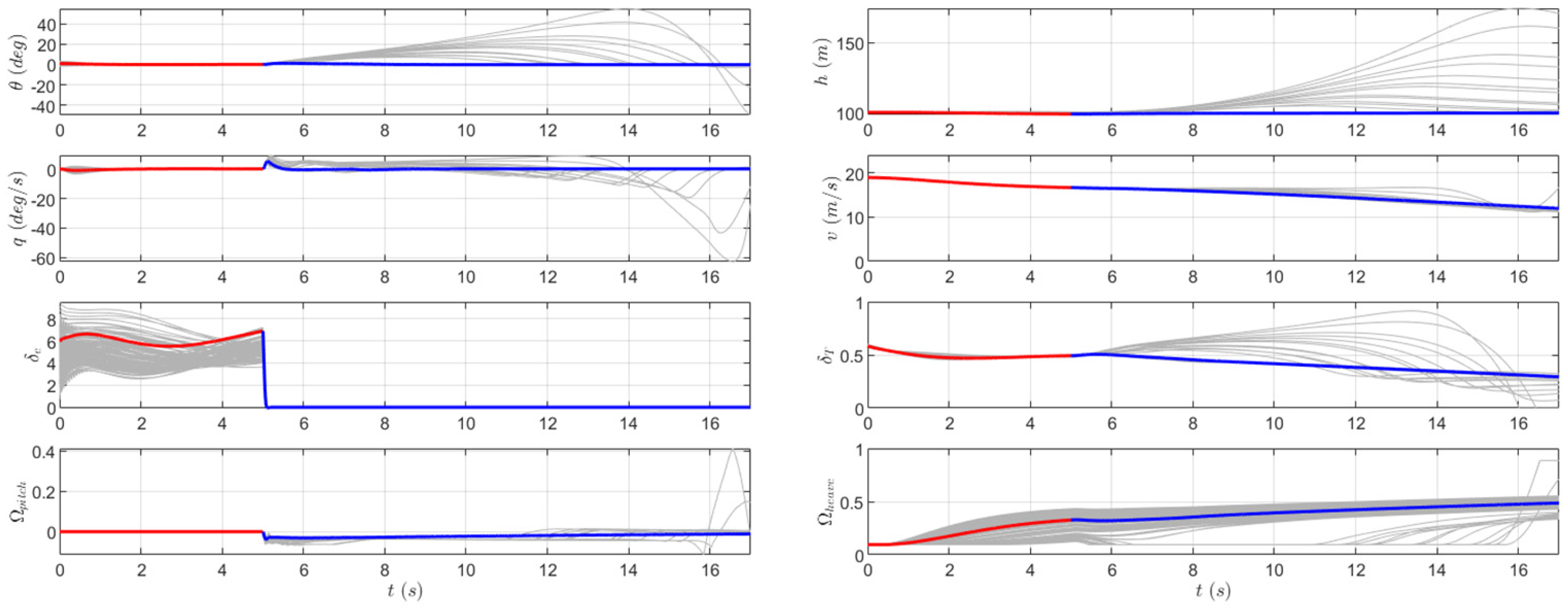
5.2. Simulation with 5 s Switching Mode
5.3. Simulation with 10 s Switching Mode
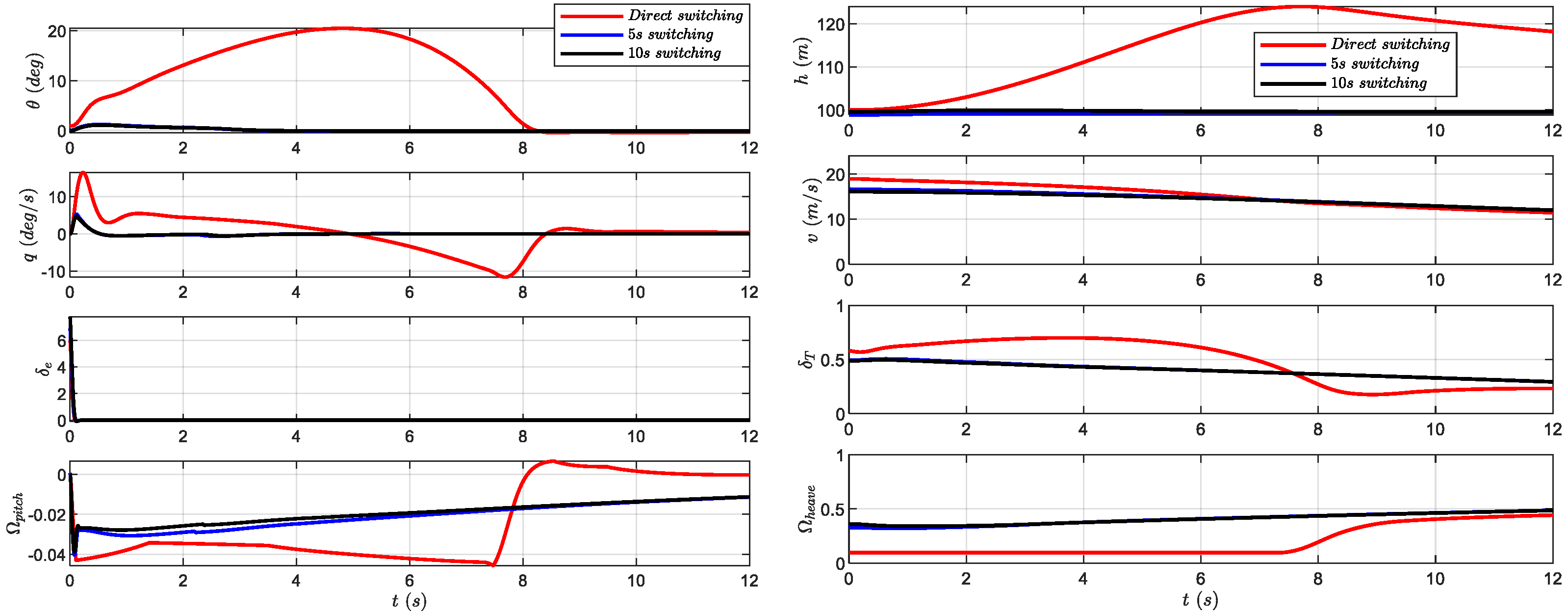
5.4. Compilation and Comparison of the Results of Three Transition Phase Designs
- A soft transition design with switching mode, after switching to rotary-wing mode, reduces the maximum pitch angle from 20.5° to 1.1°, by about 94%. In addition, the maximum pitch angle rate is reduced by about 72%. Therefore, it can inhibit the sudden change in pitch angle and pitch angle rate.
- The soft transition design reduces the height fluctuation from 24 m to 1.1 m, which is a reduction of about 95%, so it has an enhanced effect on height maintenance.
- The soft transition design reduces throttle usage by approximately 17% and therefore predictably withstands greater uncertainties, reducing the risks of saturation.
- When model uncertainty is excluded, the nominal simulation results of the soft transition design with a 5 s switching mode show little difference compared to the design with 10 s switching mode. Therefore, when UAV modeling is accurate, the soft transition design with 5 s switching mode is relatively ideal.
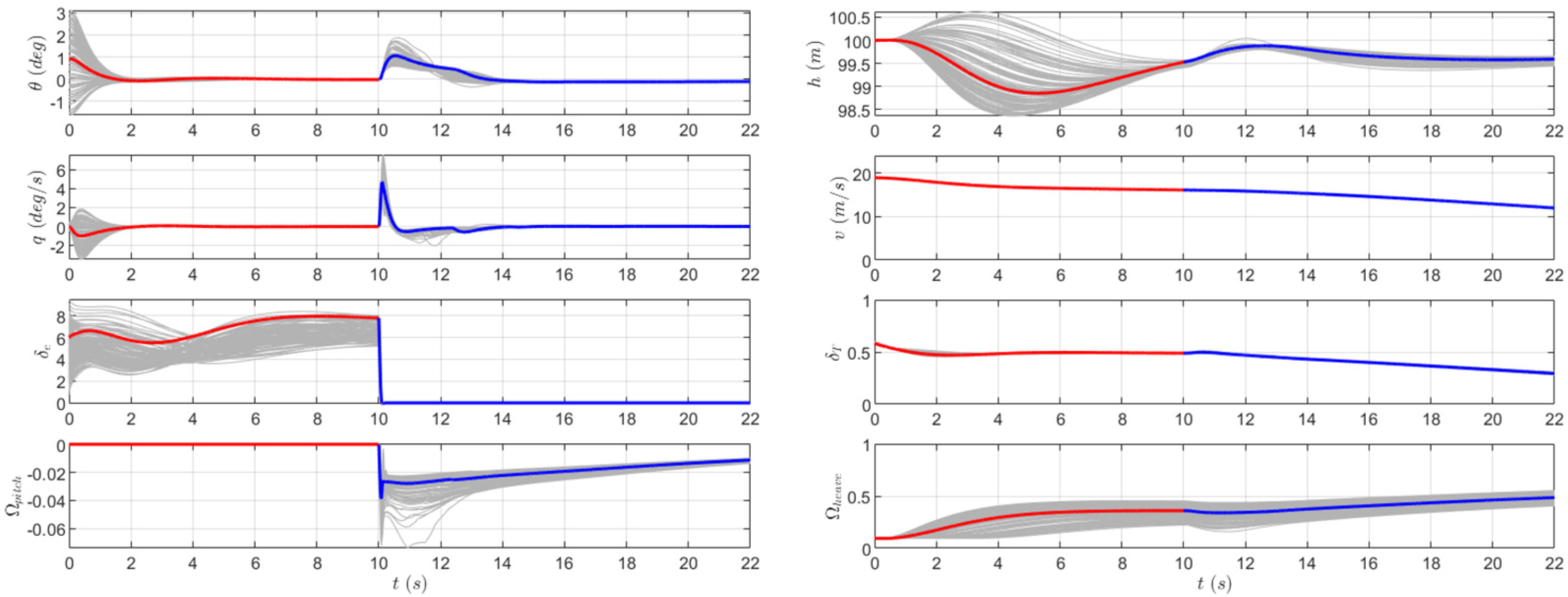
- The design of the transition phase with 5 s has passed 100 MC shooting simulations with 20% model uncertainty. However, the design of the 10 s switching mode and the direct switching design have failed in some cases.
- Under the random seed condition with poor pitch angle and height control in the 5 s switching mode design, good command tracking is obtained for the 10 s switching mode design. Therefore, the design of the transition phase with switching mode can effectively reduce the impact of model uncertainty and improve the robustness of the UAV transition phase, and the longer the duration of the switching mode within a certain limit, the better the flight stability.
- Under the design of the 10 s switching mode, the occurrence of throttle and rotor speed saturation in a few extreme cases can be avoided. Therefore, extending the switching mode duration within a certain limit can reduce the possibility of extreme cases caused by mode switching, thereby improving the safety of the UAV transition phase.
5.5. Quality Comparison of Mode Switching
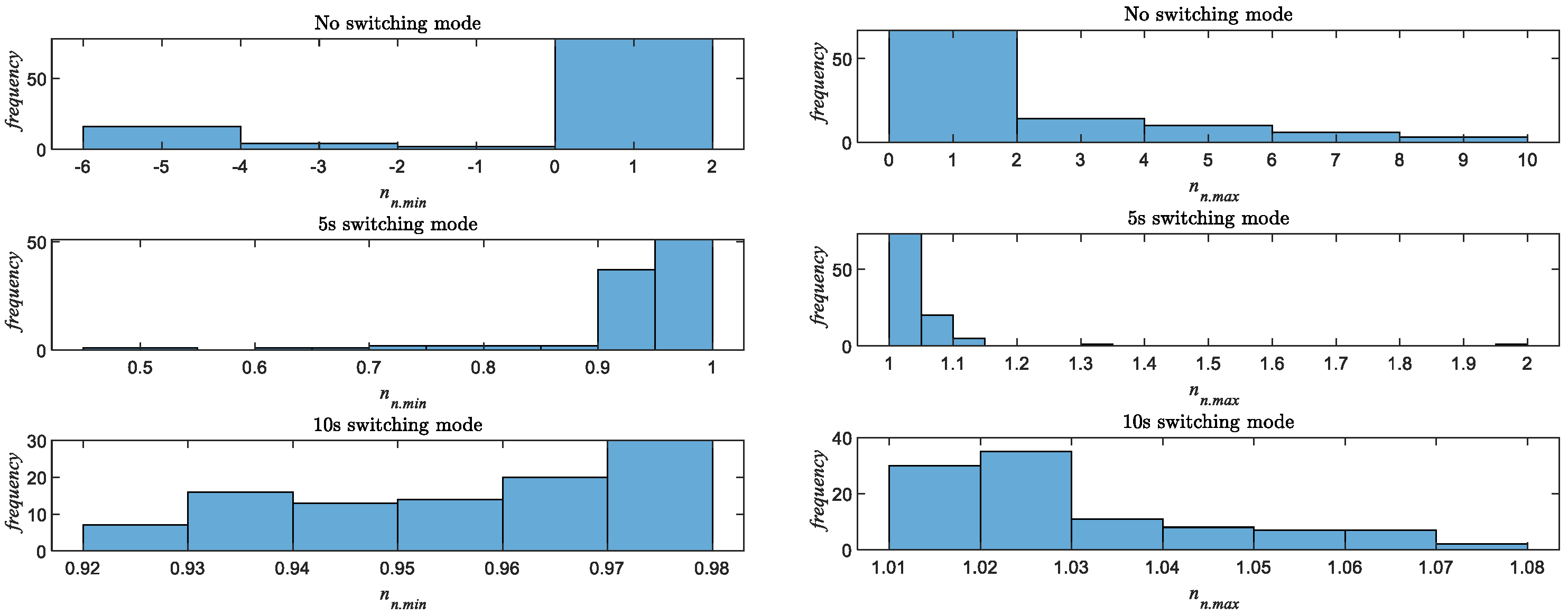
- In the case of model uncertainty, there is a greater risk without a transition segment. Although the limit normal overload in 70% of cases is distributed between 0 and 2, it can reach −6 and 10 in extreme cases. Considering the future requirements of UAM vehicles for passenger comfort and equipment safety, direct switching is obviously a dangerous and fatal practice.
- Under the soft switching design, the 5 s switching mode design can control the limits of the normal overload between 0.45 and 2, and about 90% of them are distributed between 0.9 and 1.1; in other words, the limit of the normal acceleration is within 0.1 to 1 times the gravitational acceleration. Therefore, the soft switching design of the 5 s switching mode can reduce the normal overload by about 80% and the limit of the normal acceleration by about 90% under the condition of 20% model uncertainty.
- The 10 s switching mode design can control the limits of the normal overload between 0.92 and 1.08, and about 90% of them are distributed between 0.93 and 1.06, that is, the limit of the normal acceleration is within 0.06 to 0.08 times the gravitational acceleration. Therefore, under the condition of 20% model uncertainty, the soft switching design of the 10 s switching mode can reduce the normal overload by about 55% and the limit of the normal acceleration by about 90% compared with the 5 s switching mode design.
6. Conclusions and Prospects
- The normal overload is too large, which affects the passenger comfort and equipment safety in future UAM applications;
- Sensitivity to model uncertainty. Affected by its adverse effects, it poses a threat to flight safety;
- Poor pitch attitude and altitude command tracking;
- Throttle command and rotor command saturation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature and Abbreviations
| Nomenclatures | |
| L | Lift force |
| D | Drag force |
| Y | Side force |
| l | Aerodynamic roll moments |
| m | Aerodynamic pitch moments |
| n | Aerodynamic yaw moments |
| ϕ | Roll Euler angle |
| θ | Pitch Euler angle |
| V | True airspeed |
| p | Roll angular rate |
| q | Pitch angular rate |
| r | Yaw angular rate |
| α | Angle-of-attack |
| Deflection angle of the elevator | |
| Throttle command of front-mounted propeller | |
| Ground speed | |
| Abbreviations | |
| eVTOL | Electric vertical takeoff and landing |
| VTOL | Vertical takeoff and landing |
| UAV | Unmanned aerial vehicle |
| NDI | Nonlinear dynamic inversion |
| INDI | Incremental nonlinear dynamic inversion |
| six-DOF | Six-degree-of-freedom |
| ESO | Extended state observer |
| MC | Monte Carlo |
| LoD | Lift–drag ratio |
| nn | Normal overload |
References
- Courtin, C.; Burton, M.L.; Yu, A. Feasibility Study of Short Takeoff and Landing Urban Air Mobility Vehicles Using Geometric Programming. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 70. [Google Scholar]
- Wang, M.; Zhang, S.; Diepolder, J.; Holzapfel, F. Battery package design optimizaiton for small electric aircraft. Chin. J. Aeronaut. 2020, 33, 2864–2876. [Google Scholar] [CrossRef]
- Laarmann, L.; Thoma, A.; Misch, P.; Röth, T.; Braun, C.; Watkins, S.; Fard, M. Automotive safety approach for future eVTOL vehicles. CEAS Aeronaut. J. 2023, 14, 369–379. [Google Scholar] [CrossRef]
- Sripad, S.; Viswanathan, V. The promise of energy-efficient battery-powered urban aircraft. Proc. Natl. Acad. Sci. USA 2021, 118, e2111164118. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.; Lee, J.; Lee, J.W. Holding area conceptual design and validation for various urban air mobility (UAM) operations: A case study in Seoul–GyungIn area. Appl. Sci. 2021, 11, 10707. [Google Scholar] [CrossRef]
- Edwards, T.; Price, G. eVTOL Passenger Acceptance (No. ARC-E-DAA-TN76992). 2020. Available online: https://ntrs.nasa.gov/citations/20200000532 (accessed on 17 October 2023).
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Ugwueze, O.; Statheros, T.; Horri, N.; Innocente, M.; Bromfield, M. Investigation of a Mission-based Sizing Method for Electric VTOL Aircraft Preliminary Design. In Proceedings of the AIAA Scitech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1931. [Google Scholar]
- Qing, L.; Juanxia, L. Model and adaptive control of rotor/wing compound UAV based on derivative-free adaptive NDI. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; pp. 960–965. [Google Scholar]
- Doo, J.T.; Pavel, M.D.; Didey, A.; Hange, C.; Diller, N.P.; Tsairides, M.A.; Mooberry, J. NASA Electric Vertical Takeoff and Landing (eVTOL) Aircraft Technology for Public Services–A White Paper. 2021. Available online: https://ntrs.nasa.gov/citations/20205000636 (accessed on 15 October 2023).
- Bacchini, A.; Cestino, E. Electric VTOL configurations comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Ahmed, F.; Mohanta, J.C.; Keshari, A.; Yadav, P.S. Recent Advances in Unmanned Aerial Vehicles: A Review. Arab. J. Sci. Eng. 2022, 47, 7963–7984. [Google Scholar] [CrossRef]
- Yuksek, B.; Vuruskan, A.; Ozdemir, U.; Yukselen, M.A.; Inalhan, G. Transition Flight Modeling of a Fixed-Wing VTOL UAV. J. Intell. Robot. Syst. 2016, 84, 83–105. [Google Scholar] [CrossRef]
- Kamal, A.M.; Ramirez-Serrano, A. Design methodology for hybrid (VTOL+ Fixed Wing) unmanned aerial vehicles. Aeronaut. Aerosp. Open Access J. 2018, 2, 165–176. [Google Scholar]
- Xili, Y.; Yong, F.; Jihong, Z. Transition Flight Control of Two Vertical/Short Takeoff and Landing Aircraft. J. Guid. Control. Dyn. 2008, 31, 371–385. [Google Scholar] [CrossRef]
- Yuksek, B.; Inalhan, G. Transition Flight Control System Design for Fixed-Wing VTOL UAV: A Reinforcement Learning Approach. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 0879. [Google Scholar]
- Juliana, S.; Chu, Q.P.; Mulder, J.A.; Van Baten, T.J. The analytical derivation of nonlinear dynamic inversion control for parametric uncertain system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; p. 5849. [Google Scholar]
- Kun, C.; Zhiwei, S.; Zheng, G. Deceleration Transition Control Law Design for Short Take-off Vertical Landing Unmanned Aerial Vehicle with Thrust Vector. J. Aerosp. Power 2015, 30, 3002–3009. [Google Scholar]
- Sieberling, S.; Chu, Q.P.; Mulder, J.A. Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction. J. Guid. Control. Dyn. 2010, 33, 1732–1742. [Google Scholar] [CrossRef]
- Steffensen, R.; Steinert, A.; Smeur, E.J.J. Nonlinear Dynamic Inversion with Actuator Dynamics: An Incremental Control Perspective. J. Guid. Control. Dyn. 2023, 46, 709–717. [Google Scholar] [CrossRef]
- Luo, F.; Zhang, J.; Jiang, B. Robustness analysis of two advanced flight control laws: NDI and INDI. In Proceedings of the 5th China Aeronautical Science and Technology Conference; Springer: Singapore, 2021; pp. 660–668. [Google Scholar]
- Van’t Veld, R.; Van Kampen, E.J.; Chu, Q.P. Stability and robustness analysis and improvements for incremental nonlinear dynamic inversion control. In Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 1127. [Google Scholar]
- Wang, X.; Van Kampen, E.J.; Chu, Q.; Lu, P. Stability analysis for incremental nonlinear dynamic inversion control. J. Guid. Control Dyn. 2019, 42, 1116–1129. [Google Scholar] [CrossRef]
- Lu, P.; Van Kampen, E.J.; De Visser, C.; Chu, Q. Aircraft fault-tolerant trajectory control using incremental nonlinear dynamic inversion. Control Eng. Pract. 2016, 57, 126–141. [Google Scholar] [CrossRef]
- Smeur, E.J.J.; Chu, Q.; De Croon, G.C.H.E. Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles. J. Guid. Control Dyn. 2016, 39, 450–461. [Google Scholar] [CrossRef]
- Acquatella, P.; Falkena, W.; van Kampen, E.J.; Chu, Q.P. Robust Nonlinear Spacecraft Attitude Control using Incremental Nonlinear Dynamic Inversion. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4623. [Google Scholar]
- Lombaerts, T.; Kaneshige, J.; Schuet, S.; Hardy, G.; Aponso, B.L.; Shish, K.H. Nonlinear dynamic inversion based attitude control for a hovering quad tiltrotor eVTOL vehicle. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0134. [Google Scholar]
- Simplício, P.; Pavel, M.D.; Van Kampen, E.; Chu, Q.P. An acceleration measurements-based approach for helicopter nonlinear flight control using incremental nonlinear dynamic inversion. Control Eng. Pract. 2013, 21, 1065–1077. [Google Scholar] [CrossRef]
- Mokhtari, M.R.; Cherki, B.; Braham, A.C. Disturbance observer based hierarchical control of coaxial-rotor UAV. ISA Trans. 2017, 67, 466–475. [Google Scholar] [CrossRef] [PubMed]
- Lyu, H.; Ye, Z.; Chen, Y.; Zhao, T.; Gong, Z.; Liu, X.; Qin, B.; Chen, K. Extended-State-Observer-Based Angular Acceleration Estimation for Supersonic Aircraft Lateral–Directional Control. Appl. Sci. 2023, 13, 6598. [Google Scholar] [CrossRef]
- Mao, S.; Gong, Z.; Ye, Z.; Wang, Z.; Guo, T.; Zhang, C. A Linear-Active-Disturbance-Rejection-Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles. Mathematics 2022, 10, 3333. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Explanation | Value |
|---|---|---|
| Reference area | 0.46 m2 | |
| Wingspan | 2.286 m | |
| Mean aerodynamic chord | 0.2 m | |
| Mass | 6.2 kg | |
| Moment of inertia around the x-axis | 0.5614 kg·m2 | |
| Moment of inertia around the y-axis | 0.4479 kg·m2 | |
| Moment of inertia around the z-axis | 0.87 kg·m2 |
| Average Value | Trim Results | |
|---|---|---|
| 1.44 | 0.78 | |
| 0.16 | 0 | |
| 4.77 | 4.72 | |
| 74.76 | 100.00 | |
| 19.21 | 19.00 | |
| 0.611 | 0.582 |
| Parameters | Explanation | Ranges |
|---|---|---|
| Mass | ±20% | |
| Inertial moment along | ±20% | |
| Inertial moment along | ±20% | |
| Inertial moment along | ±20% | |
| Static derivatives | ±20% | |
| Control derivatives | ±20% | |
| Damper moment coefficient | ±20% | |
| Slope of lift curve | ±20% | |
| Thrust | ±20% |
| Direct Switching | 5 s Switching Mode | 10 s Switching Mode | |
|---|---|---|---|
| −0.5~20.5 | −0.2~1.2 | −0.1~1.1 | |
| −11.6~16.5 | −1.7~5.3 | −1.0~4.7 | |
| −0.1~6.0 | −0.1~6.9 | −0.1~7.9 | |
| −0.046~0.007 | −0.040~0 | −0.039~0 | |
| 100.0~124.0 | 98.9~100.0 | 98.9~100.0 | |
| 11.42~18.92 | 11.97~18.92 | 11.98~18.92 | |
| 0.177~0.700 | 0.294~0.580 | 0.294~0.583 | |
| 0.095~0.443 | 0.095~0.487 | 0.095~0.486 |
| Direct Switching | 5 s Switching Mode | 10 s Switching Mode | |
|---|---|---|---|
| −83.7~82.7 | −49.6~54.8 | −1.6~3.1 | |
| −237.9~318.1 | −62.9~9.2 | −3.5~7.6 | |
| −0.1~9.5 | −0.1~9.5 | −0.1~9.5 | |
| −0.407~0.443 | −0.114~0.412 | −0.0741~0 | |
| 80.1~185.3 | 98.4~174.3 | 98.4~100.6 | |
| 11.21~42.55 | 11.15~18.92 | 11.94~19.82 | |
| 0~1 | 0~0.912 | 0.280~0.599 | |
| 0.095~0.886 | 0.095~0.886 | 0.095~0.552 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, Z.; Chen, Y.; Cai, P.; Lyu, H.; Gong, Z.; Wu, J. Control Design for Soft Transition for Landing Preparation of Light Compound-Wing Unmanned Aerial Vehicles Based on Incremental Nonlinear Dynamic Inversion. Appl. Sci. 2023, 13, 12225. https://doi.org/10.3390/app132212225
Ye Z, Chen Y, Cai P, Lyu H, Gong Z, Wu J. Control Design for Soft Transition for Landing Preparation of Light Compound-Wing Unmanned Aerial Vehicles Based on Incremental Nonlinear Dynamic Inversion. Applied Sciences. 2023; 13(22):12225. https://doi.org/10.3390/app132212225
Chicago/Turabian StyleYe, Zheng, Yongliang Chen, Pengcheng Cai, Huitao Lyu, Zheng Gong, and Jie Wu. 2023. "Control Design for Soft Transition for Landing Preparation of Light Compound-Wing Unmanned Aerial Vehicles Based on Incremental Nonlinear Dynamic Inversion" Applied Sciences 13, no. 22: 12225. https://doi.org/10.3390/app132212225
APA StyleYe, Z., Chen, Y., Cai, P., Lyu, H., Gong, Z., & Wu, J. (2023). Control Design for Soft Transition for Landing Preparation of Light Compound-Wing Unmanned Aerial Vehicles Based on Incremental Nonlinear Dynamic Inversion. Applied Sciences, 13(22), 12225. https://doi.org/10.3390/app132212225