1. Introduction
In our rapidly urbanizing world, urban centers face an array of opportunities and challenges encompassing sectors such as housing, transportation, education, healthcare, and the economy [
1]. As we navigate these intricate issues, the integration of artificial intelligence (AI) and computer vision (CV) emerges as a potent tool for crafting smarter urban ecosystems. Among various sectors, one area that has gained prominence is the role of intelligent mobility in the evolution of smart cities [
2,
3,
4]. Within this context, container transportation at seaports has become a linchpin, especially concerning the efficient management of parking facilities for drayage trucks, which are crucial for transporting containers between ships and their designated areas.
The pressures of urbanization have intensified the challenges at port facilities. Ports in major urban hubs now face increased cargo volumes, leading to significant congestion and logistical intricacies. These scenarios underscore the urgent need for innovative strategies within seaport operations.
This investigation delves into the domain of container drayage operations at seaports, pivotal to global trade. Our research zeroes in on addressing the efficiency challenges of managing the parking facilities for drayage trucks. Furthermore, while recent efforts have aimed at collecting performance data for ports, the absence of standardized comparative data complicates performance evaluation. Various metrics have been explored, as indicated by the World Bank’s Container Port Performance Index (CPPI) [
5], but consistent quality data remain elusive.
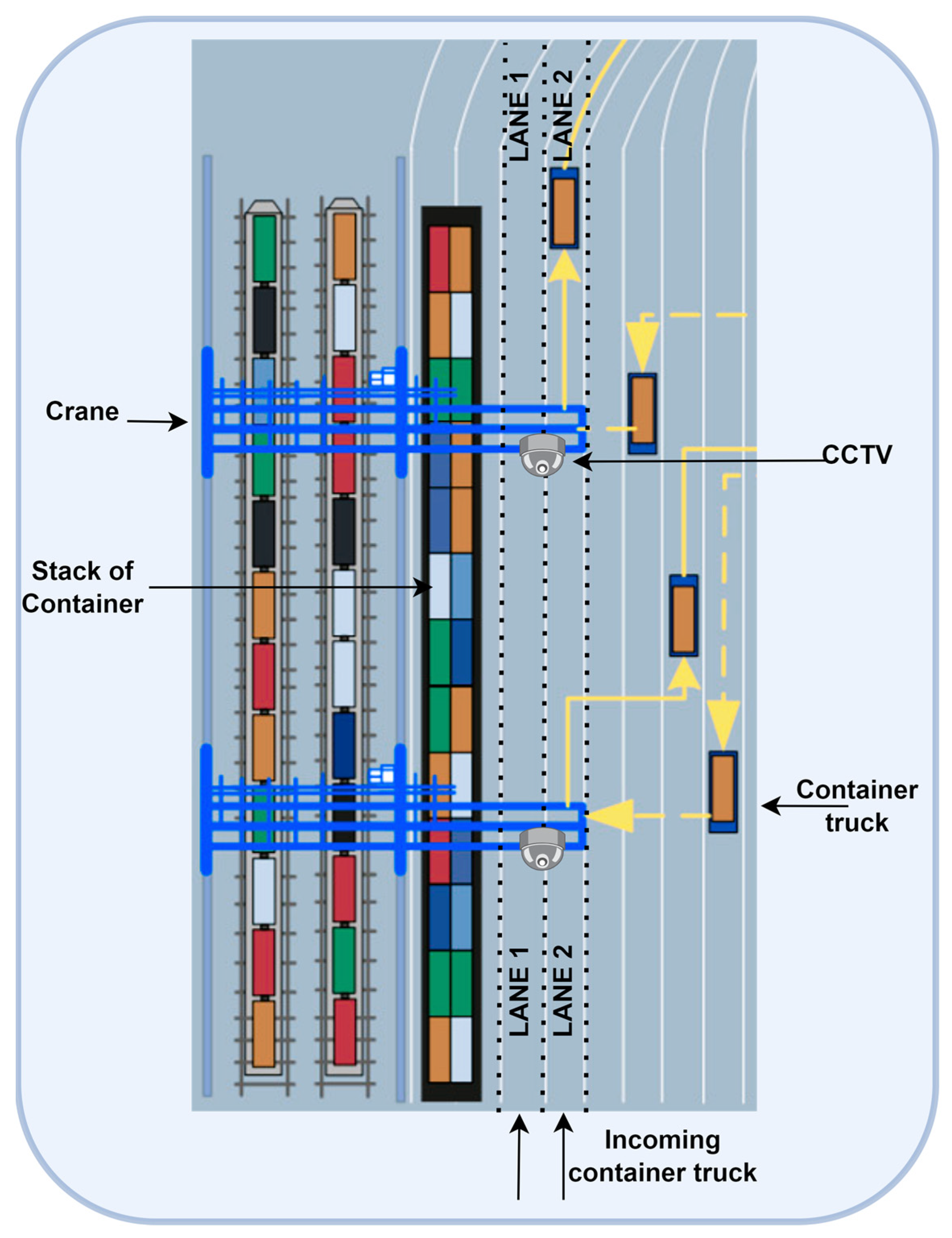
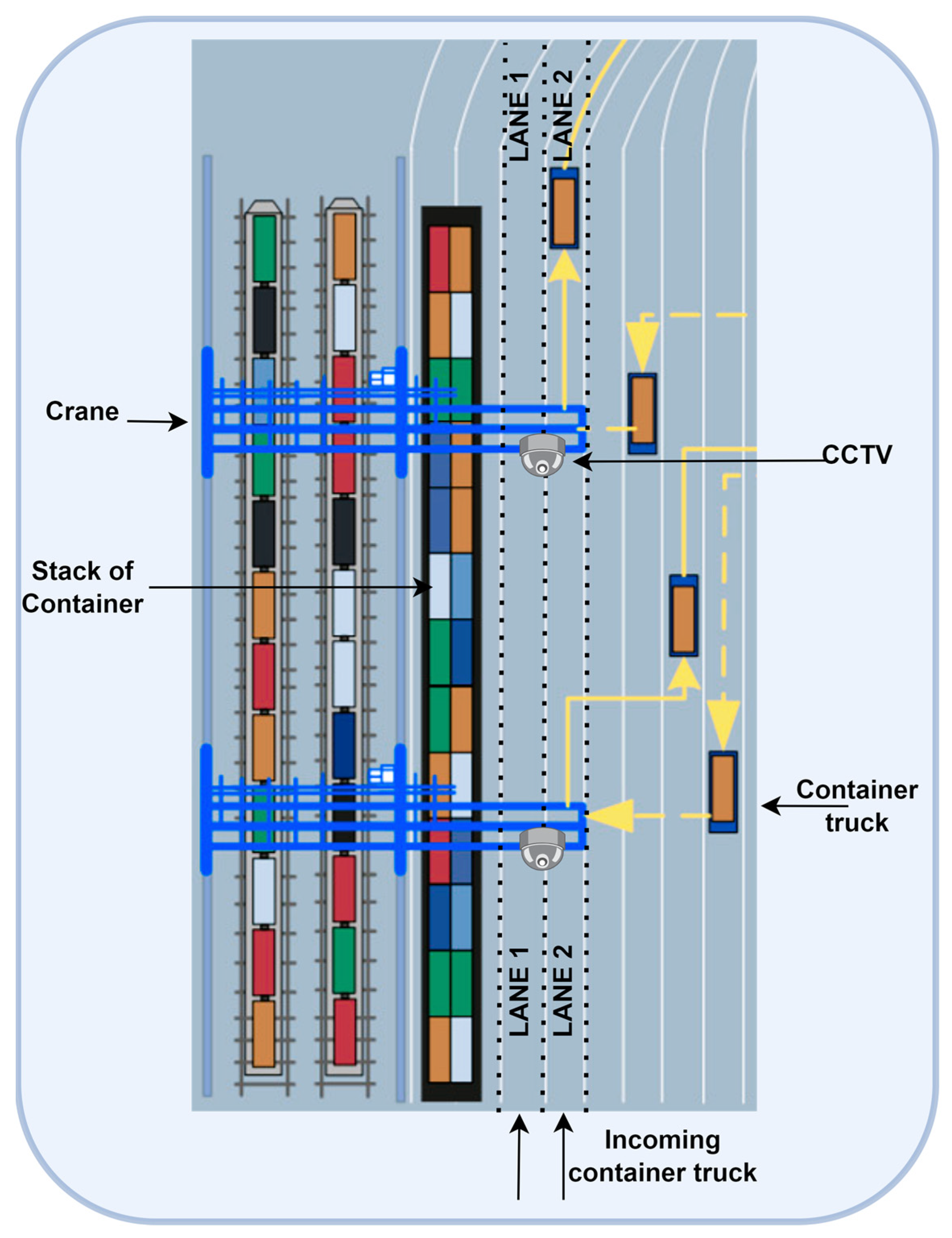
Figure 1 depicts the operational layout of a seaport’s container terminal. The diagram portrays a seaport section with two clearly delineated lanes, marked by dashed lines, designated for the movement of container trucks. On the left, cranes hover above stacks of containers, showcasing the storage and handling mechanisms. In the central portion, container trucks of different colors can be seen, possibly indicating different categories or operational statuses. Additionally, strategically placed Closed-Circuit Television (CCTV) cameras suggest a focus on security and operational monitoring within the terminal.
Our study’s distinctive contribution is two-fold. First, it underscores the potential of AI and CV, especially deep learning and transfer learning, in enhancing seaport parking systems. By leveraging these advanced techniques, we aim to process the video data from strategically positioned CCTV cameras at seaports, introducing a transformative framework for sustainable parking systems, especially in the context of container drayage operations [
3,
6]. Second, the research brings to light an innovative model enabled by deep learning, which, when applied to CCTV footage, can provide real-time data on available parking slots, amplifying the efficiency of drayage operations.
Our objectives are multifaceted. We aim to provide a thorough review of the existing literature on AI and CV and their implications in transport systems and parking management. In identifying the research gaps specifically tied to seaport container drayage parking, we seek to offer unique insights into the discourse. Furthermore, we aspire to unveil a state-of-the-art model rooted in deep learning principles to revolutionize CCTV video data interpretation.
The core hypotheses guiding our research are that AI and CV, when aptly harnessed, can vastly improve the identification of optimal lanes and parking slots for drayage trucks and that our proposed model will excel in accuracy and efficiency compared to the existing systems. Attempting to delve into this relatively unexploited domain, our study sets the stage for initiating sustainable and efficient parking systems in seaports, enriching the broader array of smart city development and global logistics advancements.
In this paper, we embark on finding a comprehensive technique to address the challenges faced in the seaport’s drayage domain. Through a rigorous exploration of the existing literature, we discern the gaps and requirements within this field. Recognizing these needs, we have developed a mathematically formulated conceptual framework tailored to provide solutions for the identified issues. Our approach is systematic, laying out a step-by-step application of the recommended methods. Fundamentally, our proposition is a mathematical framework that connects the potential of deep learning with other computer vision steps. This advanced integration not only solidifies the scientific foundation of our study, but also paves the way for practical, efficient, and scalable solutions.
2. Related Work
In the intricate network of global trade, container terminals emerge as pivotal hubs, demanding continual refinement in their operational strategies. A groundbreaking approach, as demonstrated by Xue, Lin, and You (2021) [
7], explored semi-autonomous truck platooning, ushering in a new era for local container drayage. This innovation, meticulously reducing labor and fuel costs, seamlessly aligns with studies on appointment systems, the cornerstone of modern terminal management.
In order to address the pressing challenges posed by limited yard space and crane availability in resource-constrained terminals, Tan and He (2016) devised a model that strikingly balanced yard space allocation and crane deployment [
8]. Their research underscored the delicate equilibrium between yard-sharing space and the operational costs, echoing prevalent themes in optimization and resource allocation across the literature. A more in-depth exploration [
9] has delved into container port drayage, shedding light on its multifaceted impact on the entire logistics chain. This comprehensive perspective on drayage operations echoes the critical importance of appointment systems, a recurring theme in studies focused on terminal optimization.
Within the realm of appointment systems, Huynh and Walton (2011) provided foundational insights into their strategic implementation. Their optimized management of truck flows demonstrated how these systems can alleviate congestion, seamlessly connecting with the optimization strategies [
10]. Through the optimization of truck appointments, these studies have collectively woven a narrative illustrating how well-designed appointment systems can revolutionize terminal operations. In the face of disruptions, Li, Chen, Govindan, and Jin (2018) [
11] meticulously balanced punctuality and environmental considerations, resonating with the need for flexibility in terminal operations—a concept prevalent in studies exploring yard efficiency [
12]. Their hybrid approach, blending simulation and queuing theory, underscored the tangible benefits of appointment systems in optimizing yard operations. Caballini, Mar-Ortiz, Gracia, and Sacone (2018) [
13] elevated this narrative by incorporating real-world data into their integer programing model, affirming the efficacy of truck appointment systems (TAS) in reducing waiting times. Their findings seamlessly complement the optimization strategies explored by Guan and Liu (2009) [
14], emphasizing TAS’s potential in mitigating gate congestion.
A noteworthy departure from individual decision making, the cooperative model for TAS [
15] marked a significant paradigm shift. The approach, emphasizing collaboration between transport companies and terminal operators, aligns with the collective efforts showcased in the work of Ramírez-Nafarrate, González-Ramírez, Smith, Guerra-Olivares, and Voß (2017) [
16]. Their findings underscored the potential of TAS in enhancing yard efficiency through shared decision making and optimized configurations.
The literature review provides a comprehensive examination of the existing body of knowledge concerning the utilization of AI and CV technologies in transportation systems and parking facility management, with a specific focus on their application in lane identification and parking spot detection. Several studies [
17,
18] have extensively explored the integration of deep learning and transfer learning techniques to enhance lane identification and parking spot detection across various contexts. These investigations [
17,
18,
19,
20] have effectively demonstrated the prowess of deep learning models, notably convolutional neural networks (CNN), in proficiently analyzing video data and accurately detecting lanes and parking spaces.
However, a prominent void exists within the literature regarding the precise application of these advanced technologies within the domain of container drayage operations in seaports [
21]. Seaports present unique challenges, including dynamic environments, varying lighting conditions, and the presence of substantial container volumes. Unfortunately, limited research has been carried out to address these specific challenges by harnessing the potential of AI and CV technologies. Thus, this research endeavor seeks to bridge this critical gap by introducing an innovative deep-learning-based model meticulously customized to cater to the distinctive demands and intricacies of container drayage operations within seaport parking facilities.
To enhance our understanding of the application of AI and CV technologies in seaport operations, recent research endeavors provide valuable insights and methodologies. José M. Vidal (2010) [
22] highlights the complexity of seaport container terminals and the need for multi-agent models to optimize operations, shedding light on reducing in-terminal drayage truck wait times as a critical concern [
23]. Kris Braekers, An Caris, and Gerrit K. Janssens (2013) [
24] delve into the efficient planning of drayage operations, focusing on vehicle routing problems and two-phase algorithms to enhance operational efficiency [
2]. Ioanna Kourounioti, Amalia Polydoropoulou, and Christos Tsiklidis (2016) [
25] emphasize the significance of a methodological framework that considers various factors affecting the dwell time (DT) of containers in container terminals. Workload forecasting and the integration of container terminals into the supply chain are crucial, and the paper utilizes artificial neural networks (ANN) to identify the determinants of dwell time (DT) [
26]. Gang Chen, Kannan Govindan, and Zhongzhen Yang (2016) [
27] also address the optimization of dwell time (DT) in container terminals, highlighting the importance of workload forecasting and considering factors such as the container size, type, and discharge date, the vessel’s port of origin, and the commodities transported [
18]. Rui Chen, Qiang Meng, and Peng Jia (2022) [
9] provide a comprehensive review of container port drayage studies, discussing various methodological and technological angles and the shift toward e-commerce platforms. They emphasize the significance of container port drayage in the long-haul intermodal container transportation chain and its impact on various aspects, including economic advantages, management, environment, and social benefits [
19].
Furthermore, in addressing the distribution challenges within seaports, the “simple shuttle problem” has been proposed as a potential solution [
28]. Seaports encompass a range of activities beyond import and export, including loading, unloading, storage, and delivery. Delays in these processes can result in substantial economic losses. Recent research by Othman (2021) [
29], focusing on Industry 4.0 in Malaysian seaports, highlights the adaptations made by Hamburg Port authorities, including the implementation of “SmartPort” for efficient truck parking and data access (SmartPort Logistics and SmartPort Monitor).
Seaport design inherently poses challenges for truck traffic and parking, often leading to extensive queues [
30]. A proposed lane allocation framework optimizes truck flow by implementing appointments and designated lanes for different truck types. Efficient container storage management is paramount in seaports. Models such as mixed-integer linear programing [
31] and heuristic algorithms [
32,
33] have been instrumental in optimizing storage systems. Constraints such as size, weight, color, and destination influence space allocation. Positive outcomes have been observed in studies, including one conducted at the Port of Montreal [
23], which proposed layout improvements and specialized handling equipment.
Container storage optimization plays a pivotal role in the overall efficiency and productivity of seaport operations, exerting a substantial influence on the intricacies of port logistics. Additionally, the truck parking system within seaports assumes critical importance, as it can significantly impact the traffic congestion during peak hours. For instance, Agati and Kolanovi (2020) [
34] shed light on the Port of Hamburg, which has harnessed the power of digitalization to seamlessly monitor parking spot availability. By employing state-of-the-art radar technology to locate ship parking spaces, the port aims to optimize the intermodal traffic involving trucks and other vehicles. By leveraging an array of sensors, including those on cranes, trucks, and carriers, the port capitalizes on AI and computer vision expertise to revolutionize port operations and traffic management. These cutting-edge technologies provide real-time insights into traffic congestion and container storage capacity, empowering the port managers to make informed decisions regarding truck routing and scheduling. Consequently, this judicious approach alleviates traffic congestion, enhancing the overall efficiency of the port. Additionally, AI and computer vision technologies can enhance port safety by promptly identifying potential hazards, such as improper container stacking, thereby alerting operators to the necessity of corrective measures. Furthermore, these transformative technologies contribute to the predictive maintenance of port equipment, ensuring optimal efficiency, minimizing downtime, and augmenting production.
3. Proposed Conceptual Framework
This section provides a comprehensive overview of our proposed methodology hypothetically, offering the theoretical methods required for data acquisition, preprocessing, and the theoretical underpinnings of our deep-learning-based model for the identification of optimal lane configurations and parking positions for container trucks, leveraging crane positions as a key parameter.
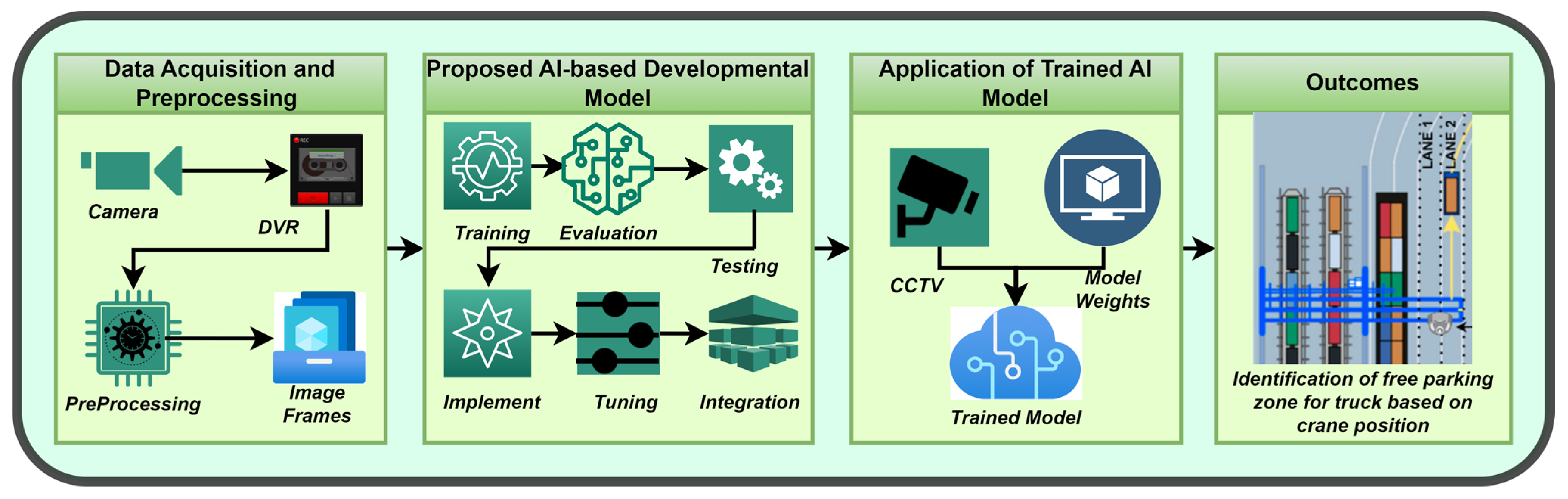
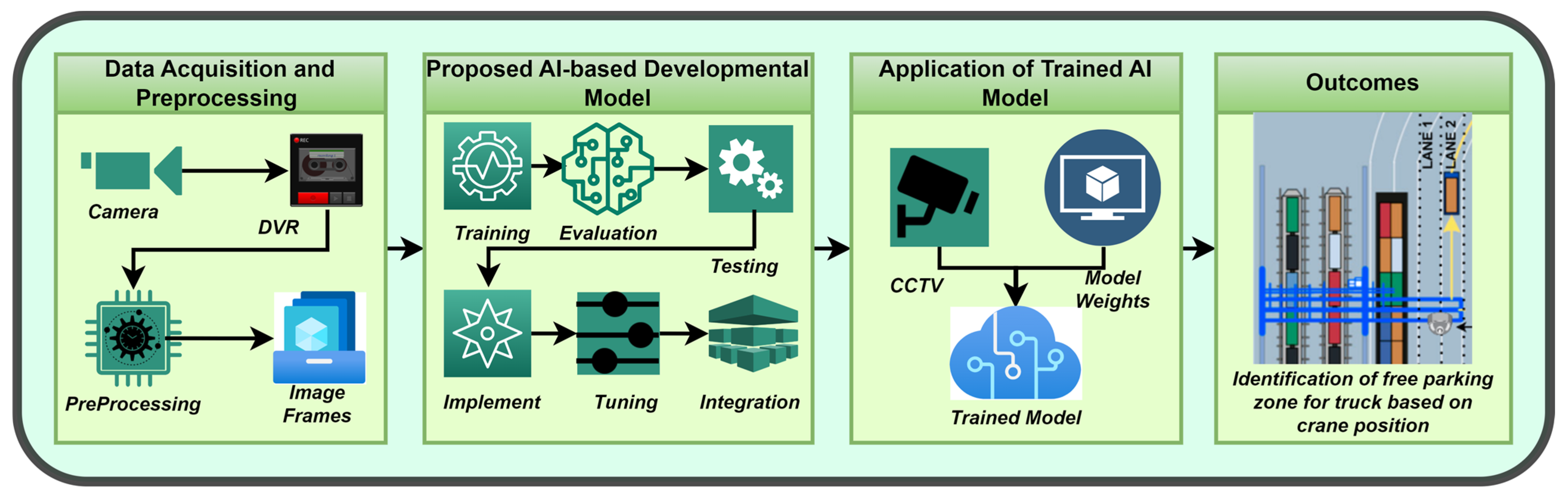
Figure 2 depicts a schematic diagram that illustrates the proposed framework. Although this method has not been applied to any dataset previously, we believe that, by following the required steps outlined in this mathematical framework, it can be successfully implemented in real-life seaport scenarios.
3.1. Proposed Step 1: Data Acquisition—Comprehensive Strategy for Video Data
Here, we provide our recommendations for implementing a comprehensive video data acquisition strategy in seaport operations.
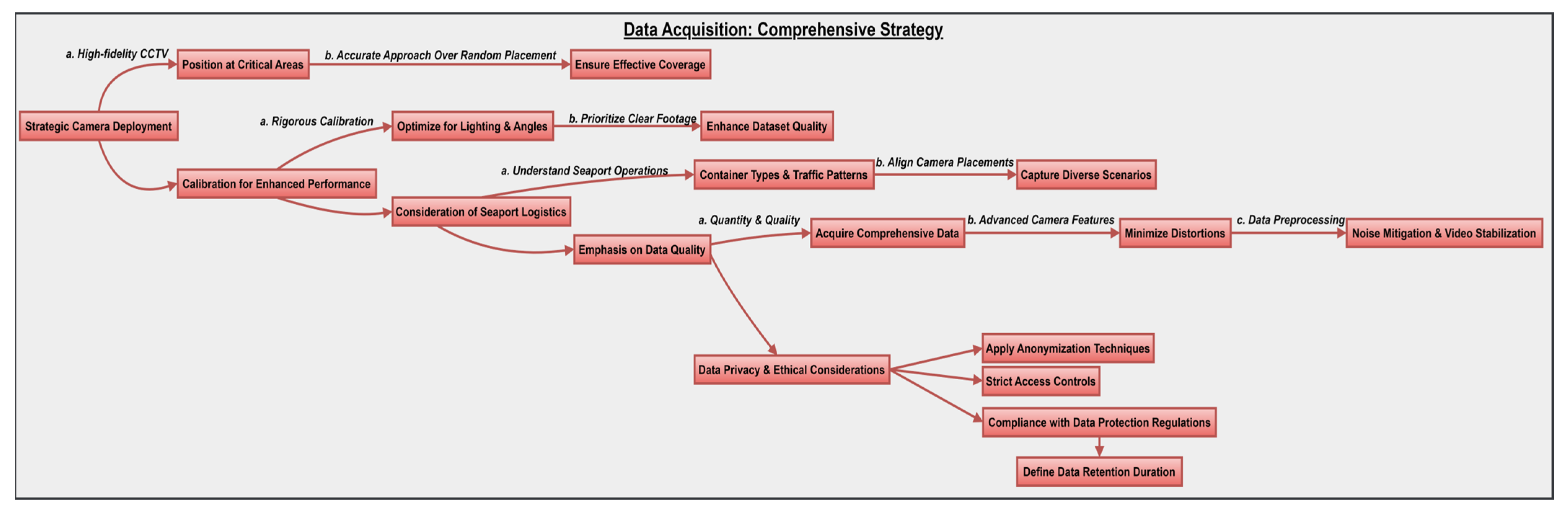
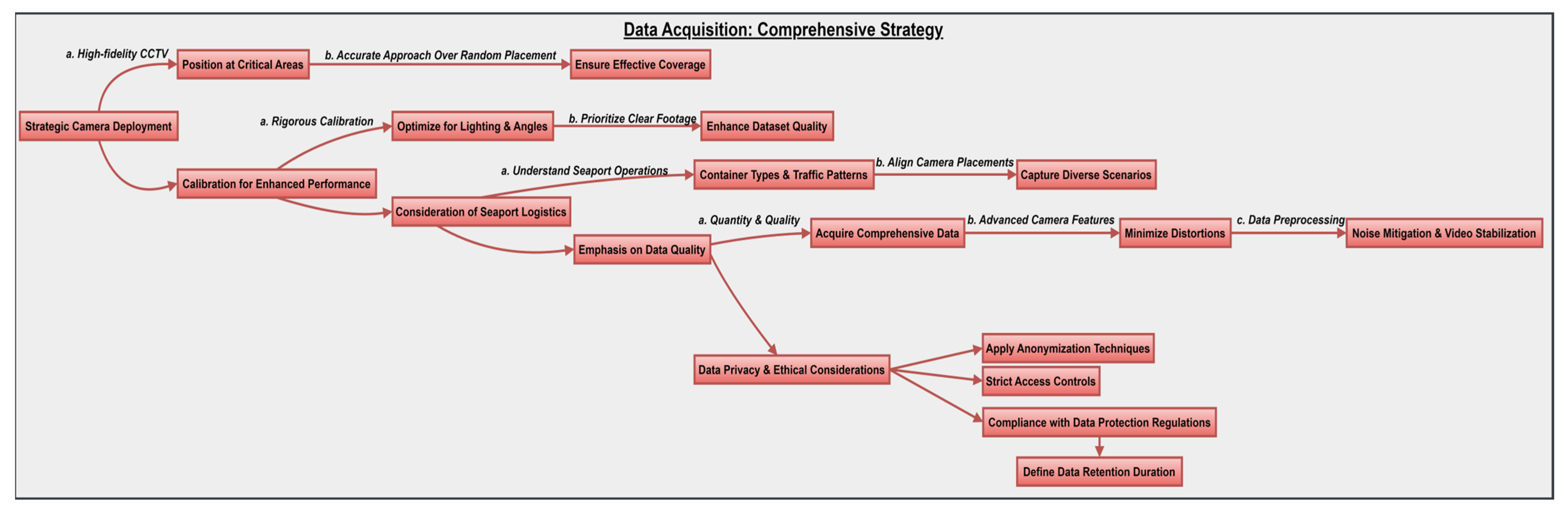
Strategic Camera Deployment:
- (a)
Employ high-fidelity Closed-Circuit Television (CCTV) cameras strategically positioned at critical areas such as entrance gates, cargo-handling cranes, and bustling container zones.
- (b)
Determine an accurate approach over random placement to ensure effective coverage.
Calibration for Enhanced Performance:
- (a)
Conduct rigorous calibration of each camera, optimizing their performance in diverse lighting conditions and at various angles.
- (b)
Prioritize clear and high-resolution footage capture to enhance the dataset’s quality.
Consideration of Seaport Logistics:
- (a)
Dive into the intricate details of the seaport operations, including container types, loading/unloading activities, and traffic patterns.
- (b)
Align the camera placements with the operational intricacies in order to capture a diverse range of scenarios, reflecting real-world seaport situations accurately.
Emphasis on Data Quality:
- (a)
Focus on both quantity and quality of the acquired data.
- (b)
Utilize cameras equipped with advanced features in order to minimize distortions and enhance image clarity.
- (c)
Implement data preprocessing techniques, including noise mitigation and video feed stabilization (the specifics of which are not detailed in this conceptual paper).
Implementing these recommendations lays the groundwork for an effective understanding of seaport operations, preparing the terrain for future experimental applications of the proposed model.
Figure 3 provides a structured representation of our recommended approach for data acquisition in seaport operations.
In our proposed framework, we prioritize data privacy and ethical considerations. To address these concerns, we plan to implement several measures. Firstly, anonymization techniques will be applied when collecting the video data, ensuring that any personally identifiable information is either removed or obfuscated, thereby protecting the individuals’ identities. Secondly, we will enforce strict access controls, limiting data access solely to authorized personnel, preventing unauthorized individuals from viewing any sensitive information. Furthermore, our framework will fully comply with relevant data protection regulations, ensuring that all data collection and processing activities align with legal requirements. Additionally, we will establish data retention policies, clearly defining the duration for which the data will be stored, thereby minimizing the risk of prolonged exposure of sensitive information.
3.2. Proposed Step 2: Conceptualizing Model and Data Preprocessing
The quality of our data is vital. Recognizing the importance of data quality, it is essential to initiate comprehensive preprocessing steps.
Here, we would recommend considering the implementation of a framework based on conceptual mathematical modeling, though it is yet to be experimented with. These steps are geared towards enhancing the video data’s adaptability for future analysis. The introduction of meticulous noise reduction and artifact removal techniques can substantially improve the clarity of the video content. Using the latest technologies can aid in discarding any unnecessary disturbances, aiming for the most refined data quality.
Additionally, addressing real-world challenges, such as camera movements and vibrations, is crucial. Adopting sophisticated video stabilization techniques can be an excellent strategy in this context. By doing so, any unintended camera movements and vibrations can be neutralized, resulting in impressively smooth video outputs. Such stabilization ensures the model’s steadfast performance, even under varied environmental scenarios.
Beyond noise management and stabilization, we would recommend the application of frame extraction techniques tailored to single out specific frames from a video stream. Such a strategy not only streamlines the analysis, but also cuts down on computational demands, thereby enhancing the model’s efficiency in later stages. By taking these preprocessing measures into account, there is an opportunity to achieve data of unparalleled quality and trustworthiness, laying a solid foundation for a future deep-learning-based model.
Some of the mathematical deductions for the equations are presented here (as shown in Algorithm 1), as follows:
| Algorithm 1: Algorithmic representation of the proposed conceptual framework. |
#Initialize the deep learning model parameters:
|
if (no_improvement_count > N): # Early stopping
break
|
In the data acquisition step, we capture the video data and apply denoising to obtain denoised video data . We then extract frames from the denoised data X′ to obtain the set of frames and perform camera parameter calibration to obtain calibrated frames .
During model training, we initialize the model parameters
and split the calibrated frames
into a training set
and a validation set
. We iterate through
epochs, and, for each epoch, we iterate through the training set. For each training example
, we perform a forward pass of the model, as follows:
and calculate the loss
L using a suitable loss function. We add regularization to the loss to prevent overfitting, as follows:
where
is the regularization strength and
represents the
norm of the model parameters
.
We then compute the gradient of the regularized loss
and use the Adam optimizer to update the model parameters. The Adam optimizer combines the advantages of both momentum and RMSprop, as follows:
where
and
are the exponential decay rates for the first and second moments, respectively,
t is the current iteration,
is the learning rate, and ε is a small constant to avoid division by zero.
Finally, we update the model parameters using the gradients obtained through the Adam optimizer as follows:
During the model evaluation, we iterate through the validation set V. For each validation example
, we perform a forward pass of the model as follows:
and calculate the evaluation metrics
using an appropriate evaluation metric function. The regularization and the Adam optimizer together help to improve the model’s generalization and convergence during training.
3.3. Model Development: Architectural Excellence for Lane Identification and Parking Spot Detection
The formulation of our deep-learning-based model represents a conceptual exploration within the domain of seaport technology. Proposed through a meticulous theoretical framework, this model’s architecture is intricately designed to address the complex challenges of lane identification and precise parking spot detection in dynamic seaport environments. Drawing upon the foundational concepts of CNN, a cornerstone in AI renowned for its ability to extract intricate hierarchical features from visual data sources [
35,
36], our model is shaped in the realm of theoretical possibility.
The architectural blueprint incorporates multiple convolutional layers, pooling layers, and fully connected layers, which are enhanced by strategic activation functions and regularization techniques. This design aims for resilience and adaptability within the complexities of seaport dynamics, informed by pioneering works in the field of deep learning [
35,
37].
The model’s theoretical development necessitates a meticulously curated dataset specifically tailored for lane identification and parking spot detection within seaports. Although it is not practically implemented, this conceptual dataset is meticulously labeled and diversified, capturing a spectrum of scenarios, including diverse lighting conditions, varied container types, and intricate traffic patterns. This theoretical dataset mirrors the multifaceted challenges encountered in real-world seaport environments, aligning with foundational principles emphasizing the importance of diverse and representative data in deep learning applications [
38,
39].
The theoretical training protocol follows a meticulous iterative methodology in theory, incorporating forward and backward propagation techniques. This approach systematically refines the network’s weights and biases within the hypothetical framework, aiming to minimize prediction errors and enhance accuracy. The employed theoretical loss function, which combines classification and regression components, is tailored for both lane identification and precise parking spot detection, drawing inspiration from the established literature, where hybrid loss functions have proven effective in similar complex tasks [
40,
41].
Our model signifies a convergence of pioneering deep learning concepts, theoretically curated datasets, and cutting-edge methodologies within the confines of theoretical exploration. By integrating the principles of CNN with innovative theoretical training techniques, this model is crafted to theoretically address the unparalleled challenges of seaport environments, offering a conceptual benchmark within the domain of intelligent seaport operations.
Enhanced Explanation of Deep Learning Techniques and Transfer Learning Methods
Alongside a generic CNN architecture, we propose the use of a pre-trained model in the form of the transfer learning approach. As far as transfer learning is concerned, the advanced version of any object detection model would suffice for this work. Transfer learning is a revolutionary technique in deep learning, allowing models to transfer the knowledge acquired from one task to another. At its core, the idea is to capitalize on the patterns and features learned by a model on a vast dataset and fine-tune this pre-trained model on a new, domain-specific dataset. For our purposes, we suggest the use of a pre-trained model, specifically the advanced versions of object detection models, to serve as the base for our transfer learning approach. The advantage of such an approach is two-fold. Firstly, it reduces the amount of data and computational resources required to achieve competitive results, and, secondly, it often results in faster convergence and superior performance, especially when dealing with domain-specific nuances, such as those found in seaport environments.
Training deep convolutional neural networks (CNNs) from the ground up demands a substantial amount of data and computational prowess [
42]. However, there is an efficient alternative: employing pre-trained models. As elucidated by He et al. [
43], these models have undergone rigorous training on expansive datasets, with ImageNet being a prime example. Within this realm of advanced computer vision, certain models have made notable marks. The YOLO (You Only Look Once) model, introduced by Redmon et al. [
44], has revolutionized object detection. Another archetype, the ResNet (Residual Network), stands out due to its design, which allows deep training without the vanishing gradient problem [
43]. Then, there is the VGG (Visual Geometry Group Network), developed by Simonyan and Zisserman [
45], which is celebrated for its effectiveness in computer vision endeavors. The foundational layers of a pre-trained model, already acquainted with generic image patterns, employ transfer learning, as outlined by Pan and Yang [
46], to capitalize on its pre-existing knowledge when fine-tuned for specific tasks.
Mathematical Formulation:
Feature Extraction: Let us consider a pre-trained model trained on a dataset . The last few layers of the model are usually fully connected layers responsible for classification. The earlier layers capture the generic features. Given an input from our new dataset , the extracted features can be represented as follows: here represents the pre-trained model without its classification layers.
Fine-tuning: Using the extracted features , we train a classifier for our task on : where is the output prediction for input .
To address this challenge, our work presents a specialized adaptation of the YOLOv7 object detection model. Recognized for its efficiency and effectiveness in various applications, YOLOv7’s latest iteration has the potential to revolutionize the way in which we approach surveillance and management tasks in seaports.
However, a one-size-fits-all model often falls short in domain-specific scenarios. Acknowledging this, we plan to not just employ YOLOv7, but to refine and reshape it to suit the needs of seaport operations. We have undertaken the task of developing a hybrid version of YOLOv7, meticulously fine-tuning it with a dataset that mirrors the sophisticated landscape of a bustling seaport.
The basis of our approach is the creation of a robust training dataset, meticulously annotated to reflect the seaport’s distinctive characteristics. From the precise delineation of lanes to the indication of parking spot occupancy, each image and video frame serves as a rich source of information, guiding the model to recognize and interpret the seaport-specific patterns and features. Adapting YOLOv7 to our tailored dataset is just one piece of the puzzle. To truly enhance the model’s performance, we delve into the intricacies of hyperparameter tuning. By experimenting with and adjusting parameters such as the learning rates and batch sizes, and by making structural tweaks to the model architecture, we seek the optimal configuration that maximizes both accuracy and operational efficiency.
The rigorous phase of evaluation and validation is what sets a model apart in real-world applications. It is here that our customized YOLOv7 model is subjected to a series of stringent tests, ensuring its competency in reliably identifying lanes and parking availability, among other tasks, proving its worth as a dependable tool for real-time analysis. Upon satisfying our comprehensive validation procedures, the fine-tuned model is poised for deployment. Positioned at the heart of our seaport monitoring framework, it is expected to provide an insightful and real-time analysis of the video data, thereby enhancing the overall functionality and safety of the seaport operations.
3.4. Model Evaluation: Rigorous Assessment for Performance Validation
Our proposed mathematical model presents a theoretical framework tailored for seaport parking facility management. While this model has been meticulously designed and structured, it is important to note that it has not yet been evaluated in practical seaport environments. The proposed model serves as a conceptual foundation, offering innovative methodologies for identifying lanes and detecting parking spots within seaports. As with any theoretical proposal, its real-world effectiveness and performance can only be truly assessed through rigorous implementation and an evaluation in the specific domain. During implementation, it is imperative to conduct thorough performance evaluations, considering metrics such as accuracy, precision, recall, and the F1-score, to gauge its practical utility. These evaluations will be essential in order to validate its capabilities and to determine its adaptability and effectiveness in dynamic and challenging seaport scenarios. Furthermore, comparative analyses against the existing methodologies and baseline models will provide essential insights, offering a benchmark for assessing the proposed model’s advantages, computational efficiency, and suitability for seaport parking facility management.
3.5. Model Implementation and Integration: Real-World Application and Seamless Integration
In our theoretical framework, upon successful hypothetical evaluation and validation, the proposed model hypothetically advances to the crucial phase of potential implementation within real-world seaport parking facility management systems. The theoretical integration of the model into existing infrastructure hypothetically enables real-time analysis and data-driven decision making, potentially enhancing the traffic management and optimizing parking space allocation.
The model’s hypothetical outputs, including lane identification and parking spot availability, could be hypothetically presented visually, and communicated to the relevant stakeholders through user-friendly interfaces or hypothetically integrated into automated control systems. These hypothetical measures would ensure effective and efficient operation within the hypothetical seaport environment.
During this theoretical implementation phase, practical considerations are hypothetically addressed, including the computational resource requirements, scalability, and system compatibility. Continuous real-time monitoring of the model’s performance allows for necessary adjustments, hypothetically ensuring its seamless integration and reliable operation within the dynamic seaport ecosystem.
3.6. Model Refinement and Future Developments: A Commitment to Continuous Enhancement
The commitment to the continuous refinement and improvement of our model is unwavering, driven by the recognition of emerging challenges and the aspiration to continually enhance performance. Valuable feedback from seaport operators, drayage truck drivers, and other stakeholders catalyzes the ongoing model refinement.
Furthermore, we remain vigilant for advancements in deep learning techniques, which include the exploration of novel architectures and innovative training strategies. These advancements are actively incorporated into our model in order to elevate its accuracy, robustness, and adaptability within the dynamic seaport environment.
Looking ahead, our future developments may encompass the integration of additional sensor data sources, such as LiDAR or radar, to further augment the model’s perception capabilities. Additionally, our collaborative efforts with seaport authorities and industry partners aim to facilitate the collection of more extensive and diverse datasets, enabling our model to adapt effectively to the evolving complexities of seaport environments. This commitment ensures the enduring relevance and efficacy of our intelligent seaport mobility solution.
4. Discussion: Comprehensive Analysis of the Deep-Learning-Oriented Framework
The discussion section provides an in-depth examination and elucidation of our proposed deep-learning-oriented framework, delving into its strengths, limitations, and implications for the management of container drayage parking facilities within seaports.
Our deep learning model exhibits a multitude of strengths that render it highly suited to addressing the complexities of lane identification and parking space detection in seaport environments. Using sophisticated deep learning methodologies, notably CNN, our model can demonstrate exceptional precision and resilience in analyzing the video data captured by CCTV cameras. Its ability to handle intricate and dynamic scenarios, diverse lighting conditions, and the substantial presence of containers attests to its adaptability and effectiveness within authentic seaport settings. Furthermore, the integration of transfer learning techniques enhances the model’s performance by capitalizing on the knowledge and features acquired from extensive datasets. This approach empowers the model to draw upon pre-trained networks, facilitating generalization and accurate predictions, even with limited labeled training data. The adoption of transfer learning not only conserves computational resources, but also amplifies the efficiency and effectiveness of the training process [
46].
However, it is crucial to acknowledge the inherent limitations of our proposed model. Seaport settings are characterized by significant heterogeneity and are subject to various environmental factors, including adverse weather conditions and obstructions caused by container movements. These factors can challenge the model’s accuracy and dependability. Despite being trained on labeled data, there may be instances in which the model encounters scenarios or anomalies inadequately represented in the training dataset. Therefore, the ongoing refinement and adaptation of the model to address novel and evolving challenges become indispensable. Additionally, the successful implementation of the proposed model relies heavily on the availability and quality of the video data captured by the CCTV cameras. Considerations related to the camera placement, coverage, and resolution assume paramount importance, as they can significantly impact the model’s performance. Thus, meticulous attention must be given to optimizing the CCTV camera setup and developing robust maintenance protocols to ensure the availability of high-quality video data for analysis.
The implications of our deep-learning-based model are important for the management of container drayage parking facilities within seaports. By accurately identifying lanes and parking spaces, the model facilitates efficient traffic management, the optimal allocation of parking spaces, and the streamlined movement of containers. This, in turn, contributes to heightened operational efficiency, reduced congestion, and overall improvements in productivity across seaport operations. Integrating the model into the existing parking facility management system enables real-time decision making and proactive measures to address parking challenges, fostering the development of more sustainable and efficient transportation networks within seaports.
Our proposed deep-learning-based model demonstrates immense potential in addressing the challenges associated with lane identification and parking spot detection in container drayage at seaports. While the model exhibits commendable accuracy and adaptability, careful consideration must be given to its limitations and associated considerations. Several limitations and challenges were encountered during the development and conceptualization of our mathematical framework for seaport parking management. One of the primary challenges was the diverse and dynamic nature of the seaport operations, including varying lighting conditions, container types, and traffic patterns. Adapting our framework to accommodate this complexity, while ensuring real-time processing capabilities, was a significant challenge. Additionally, the scarcity of comprehensive and standardized datasets specific to seaport environments posed limitations on the depth of our preliminary testing. Without access to extensive real-world data, our ability to provide concrete quantitative results was constrained. Furthermore, the integration of artificial intelligence and computer vision technologies into seaport environments presented its own set of challenges, particularly concerning model robustness and accuracy.
Addressing the potential challenges and limitations in the real-world implementation of our framework is crucial for a comprehensive understanding. Scalability emerges as a concern, particularly in larger seaports, where accommodating more cameras and increased data volume could strain the computational resources, potentially leading to longer processing times and heightened costs. Data privacy is also vital, given the sensitive nature of seaport operations, necessitating compliance with data protection regulations and the implementation of robust security measures, such as encryption and access controls.
Furthermore, the infrastructure requirements for real-time video analysis should not be underestimated, prompting seaports to invest in high-performance servers, GPUs, and network equipment. The regular maintenance and calibration of CCTV cameras are essential to ensure consistent performance, with environmental factors such as dust and weather conditions posing challenges. Achieving low-latency responses in the face of a large number of video feeds calls for the optimization of algorithms and hardware. Additionally, the framework’s adaptability across various seaports may require customization and fine-tuning, due to the differences in layouts and operational practices, adding complexity to its implementation. The seaports must carefully consider the costs of encompassing hardware, software licenses, and the recruitment and retention of skilled personnel proficient in deep learning and computer vision. These considerations highlight the need for meticulous planning and a comprehensive approach to successfully apply our framework in dynamic seaport settings.
Despite these challenges, our study has provided valuable insights and has laid the foundation for future research endeavors, where addressing these limitations will be a key focus. By acknowledging these challenges, we aim to encourage further research in overcoming these obstacles, ultimately advancing the application of AI and CV technologies in seaport logistics.
4.1. Contribution to Seaport Operations’ Efficiency and Sustainability
In this section, we delve into the tangible ways that our proposed framework significantly enhances the efficiency and sustainability of seaport operations, providing real-life examples of its positive impact on container drayage and traffic management.
4.1.1. Optimizing Traffic Flow and Operational Efficiency
The implementation of advanced technologies within seaport operations has been the subject of extensive research, aiming to streamline the processes and enhance efficiency. Our proposed framework, deeply rooted in AI and CV technologies, plays a pivotal role in optimizing the traffic flow within seaports. By leveraging predictive algorithms [
38] and real-time data analysis, our system dynamically redirects incoming trucks during the peak hours, effectively mitigating congestion and ensuring uninterrupted traffic flow. This dynamic optimization not only minimizes delays, but also significantly enhances the overall operational efficiency of seaports.
4.1.2. Real-Time Updates and Predictive Maintenance
Seaport efficiency is greatly enhanced by the provision of real-time information to drivers and operators. Our framework offers real-time updates on parking space availability and traffic conditions. The drivers receive notifications on the available parking spaces closest to their destination, reducing their search time and optimizing operations [
47]. Additionally, our system employs predictive maintenance, anticipating maintenance needs based on the equipment usage patterns. This proactive approach prevents breakdowns, ensuring seamless operations and bolstering overall efficiency.
4.1.3. Efficient Resource Allocation and Dynamic Route Planning
Efficient resource allocation is fundamental to seaport operations, ensuring the optimal utilization of manpower and equipment. Our framework provides valuable insights that facilitate intelligent resource allocation. During off-peak hours, the system intelligently deploys fewer staff, optimizing the operational costs while maintaining service quality. Furthermore, the framework employs dynamic route planning, rerouting vehicles in response to real-time obstacles, such as road closures [
48]. This adaptive approach minimizes delays, enhances delivery timelines, and augments operational resilience.
4.1.4. Environmental Sustainability
The sustainability of seaport operations is of paramount importance in the contemporary era. Our framework contributes significantly to environmental sustainability by reducing the carbon footprint associated with transportation activities within seaports. By precisely mapping routes and optimizing drayage movements, our system minimizes unnecessary vehicle movements, thereby decreasing fuel consumption and emissions [
49]. This eco-friendly approach aligns with global sustainability goals, marking a significant stride towards greener seaport practices.
These real-life examples, supported by credible studies, demonstrate the practical implications of our framework in seaport operations. While these examples provide a glimpse of its potential, it is essential to acknowledge that these are theoretical advancements awaiting practical validation through further research and implementation. Our framework serves as a pioneering step toward a future where seaport operations are not only efficient and productive, but also environmentally conscious and sustainable.
5. Future Scope and Applicability of the Proposed Model in Seaports
The future scope and potential applications of the proposed deep learning model, which focuses on identifying lanes and detecting parking spots in seaports, are considerable, offering opportunities for advancements in seaport operations. This section explores the potential for the future expansion and broader utilization of the model, taking into account emerging trends and technological developments.
5.1. Integration of Autonomous Vehicles
With the rapid evolution of autonomous vehicle technology, our model can seamlessly integrate with autonomous drayage trucks operating within seaports. Leveraging the model’s capabilities in lane identification and parking spot detection, autonomous vehicles can navigate port premises with heightened precision and safety. This integration not only enhances the efficiency of container drayage operations, but also reduces the risk of human error and optimizes the traffic flow within seaports.
5.2. Augmented Traffic Management Systems
Our deep learning model can be further extended to enhance overall traffic management systems within seaports. By analyzing the real-time video data from CCTV cameras, the model can provide insights into the traffic patterns, congestion points, and potential bottlenecks. This valuable information can be used to optimize the traffic flow, reroute vehicles efficiently, and implement dynamic traffic management strategies. Consequently, seaport authorities can achieve better resource allocation, minimize delays, and ensure smoother operations.
5.3. Integration with IoT and Sensor Networks
To augment its capabilities, our model can integrate with the Internet of Things (IoT) devices and sensor networks deployed within seaports. By incorporating the data from various sensors, such as vehicle detectors, environmental sensors, and container tracking devices, the model can gain a more comprehensive understanding of the seaport environment. This integration empowers the model to make well-informed decisions, considering contextual factors such as weather conditions, container availability, and the overall port capacity. The synergy between the deep learning model and IoT/sensor networks enhances the overall efficiency and responsiveness of seaport operations.
5.4. Predictive Maintenance and Resource Optimization
By analyzing video data and sensor information, the model plays a pivotal role in predictive maintenance and resource optimization within seaports. It can detect anomalies, identify potential maintenance needs, and predict equipment failures or malfunctions. This proactive approach allows seaport operators to schedule maintenance activities, optimize resource allocation, and minimize downtime. By preventing unexpected equipment failures, the model ensures uninterrupted operations and boosts the overall productivity of the seaport.
5.5. Expansion to Diverse Seaport Operations
While the primary focus of this research revolves around lane identification and parking spot detection, the underlying deep learning model can be adapted and extended to address various other seaport operations. For example, its object detection capabilities can be applied to facilitate efficient container handling, identify different container types, and monitor cargo movements. Additionally, it can be utilized in security surveillance to detect unauthorized access or suspicious activities within the seaport premises. The model’s versatility and adaptability make it an asset for a wide range of seaport management and operational tasks.
5.6. Collaborative Engagement and Knowledge Sharing
The future potential of the proposed model lies in fostering collaboration and sharing knowledge among seaports, academia, and industry stakeholders. Establishing collaborative frameworks and exchanging datasets, methodologies, and best practices can accelerate the adoption and advancement of deep-learning-based solutions in seaport operations. This collaborative approach stimulates innovation, facilitates benchmarking, and supports the development of standardized models and frameworks, ultimately enhancing efficiency and sustainability across numerous seaports worldwide.
5.7. Safety Concerns or Challenges in Seaport Operations
An alarming trend in seaport operations is the escalating number of accidents, particularly since 2016 [
50].
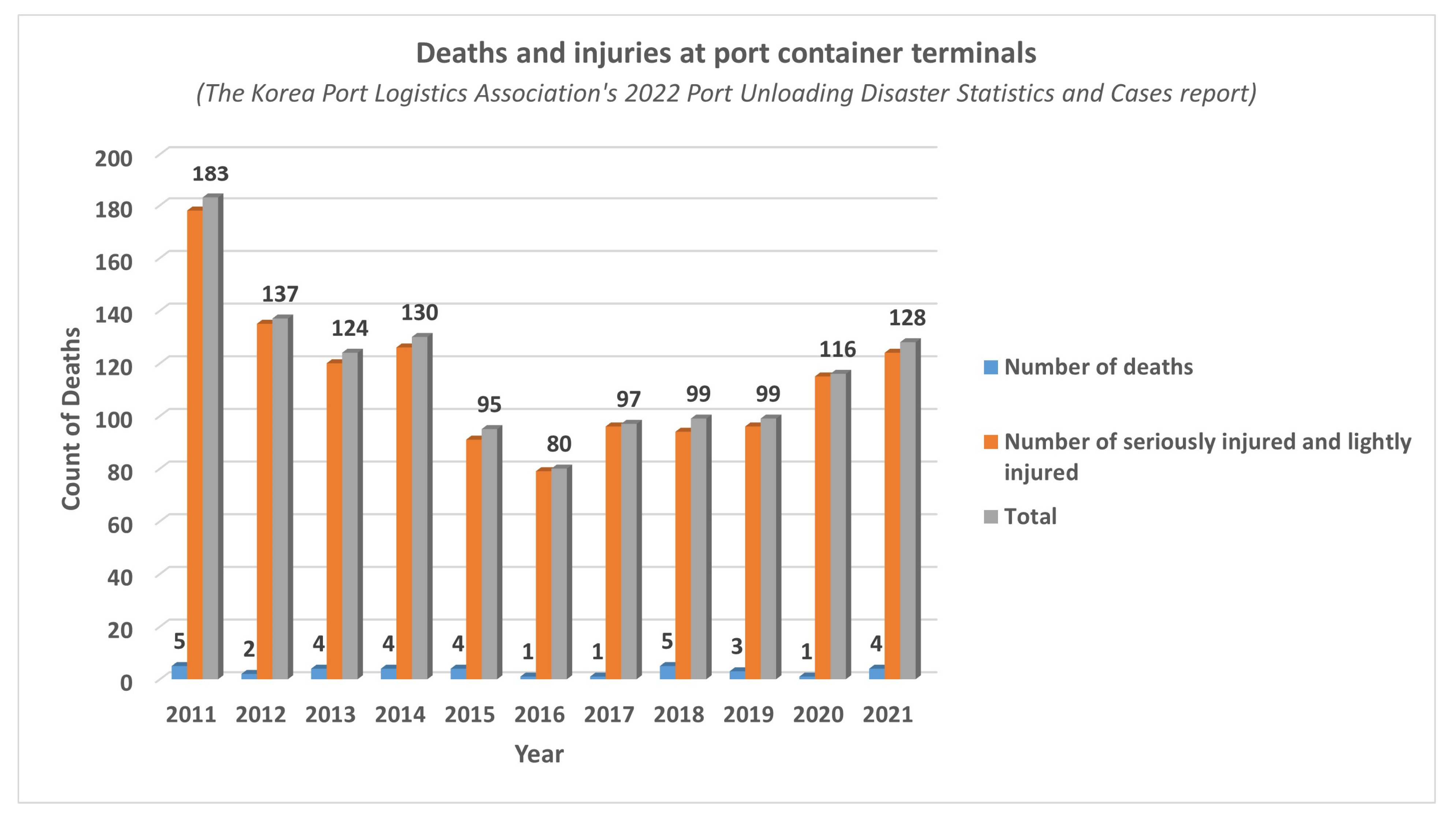
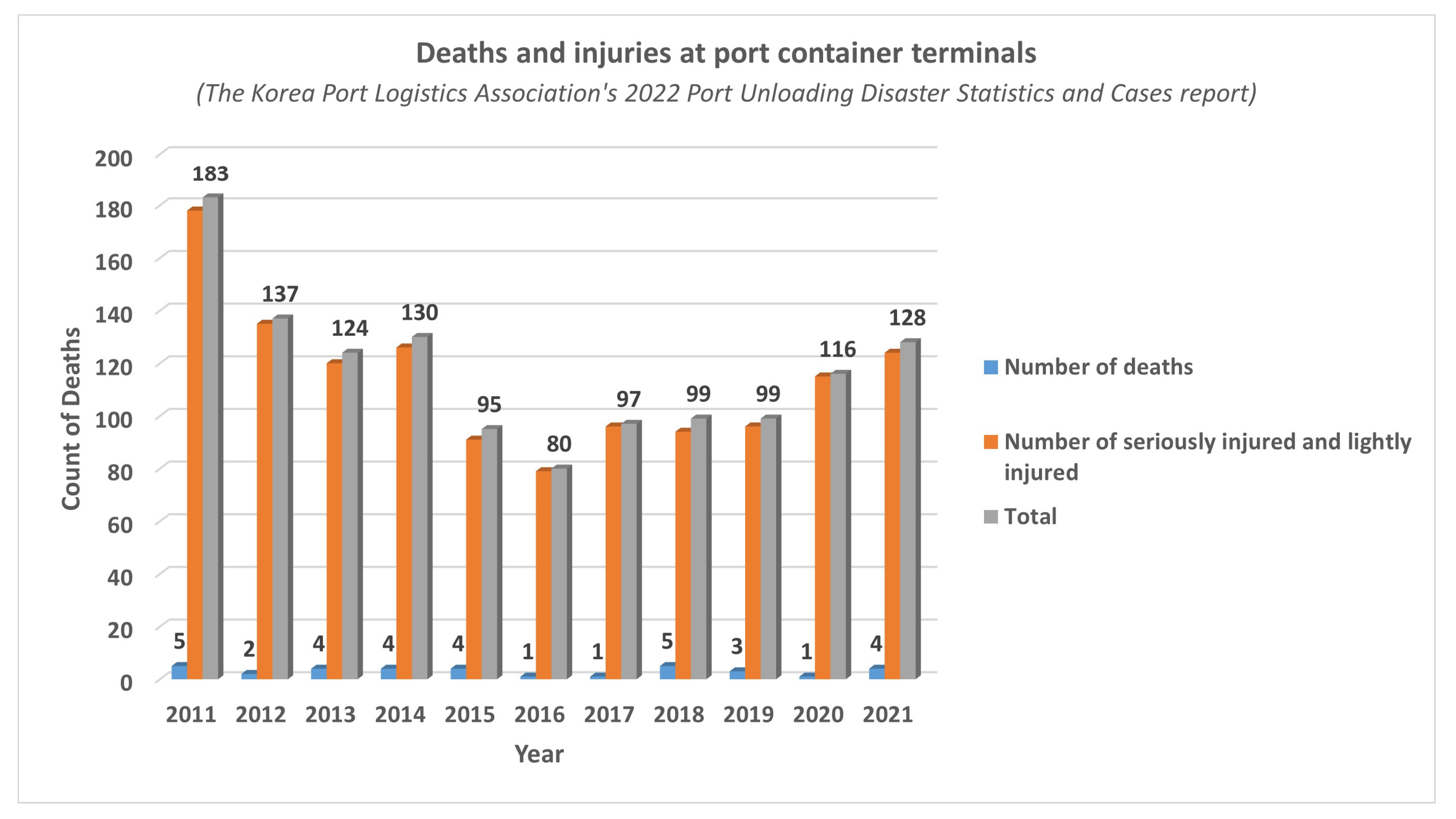
Figure 4 shows that the number of deaths and injuries at port container terminals is increasing every year. The Korea Port Logistics Association’s 2022 Port Unloading Disaster Statistics and Cases report underscores a concerning reality—fatalities and injuries within port container terminals are on the rise [
51]. These accidents primarily involve interactions between port equipment and workers, indicating a pressing need for heightened safety awareness and the application of intelligent technologies. Integrating smart solutions, such as IoT-based sensors and real-time monitoring systems, can substantially enhance the safety protocols in seaports. By leveraging these technologies, the ports can proactively identify the potential risks, create safer work environments, and significantly reduce accidents, thereby safeguarding the well-being of both the workers and the equipment.
Implementing an innovative framework in real-world seaport environments requires comprehensive assessment and validation. Pilot studies, such as those analyzed in the Tanjung Intan Seaport, can determine the performance under actual conditions [
52]. Quantitative metrics, such as those proposed for the Port of Rotterdam, should be established in order to measure the throughput, congestion, and efficiency [
53]. A comparison of the new framework against the existing methodologies could utilize user perception metrics for a more rounded evaluation [
54]. The adaptability of the framework to various seaport sizes can be guided by a scalable management platform approach [
55]. User feedback is essential for qualitative validation, ensuring that the usability and effectiveness meet the stakeholder expectations. An environmental impact assessment is necessary in order to evaluate sustainability efforts, a key aspect of modern port management. An economic analysis should determine the cost–benefit and return on investment in order to justify implementation. Safety, security, and data integrity are paramount to protect against threats and ensure reliable decision making. Lastly, adherence to industry standards and regulations will ensure compliance and facilitate broader acceptance of the framework [
56].




{kind=link}
{kind=link}
{kind=link}
{kind=link}