
Effect of Multiple Reclosing Time Intervals on Axial Vibration of Winding

Abstract
:Featured Application
Abstract
1. Introduction
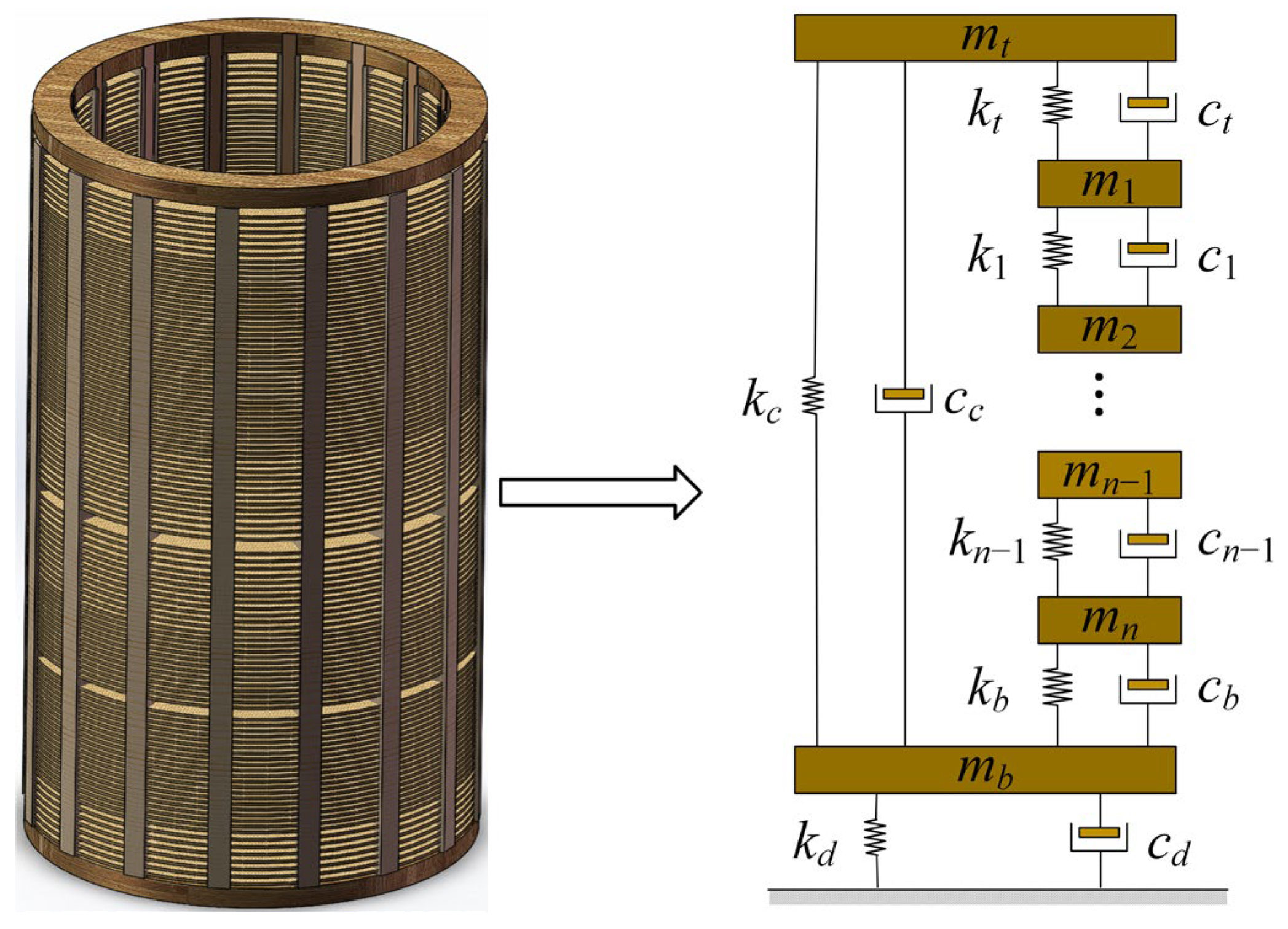
2. Dynamic Model of Winding Axial Vibration
2.1. Solving the Axial Vibration Model
2.2. The Parameters of Transformer Model
3. Effect of Reclosing Interval on Winding Vibration
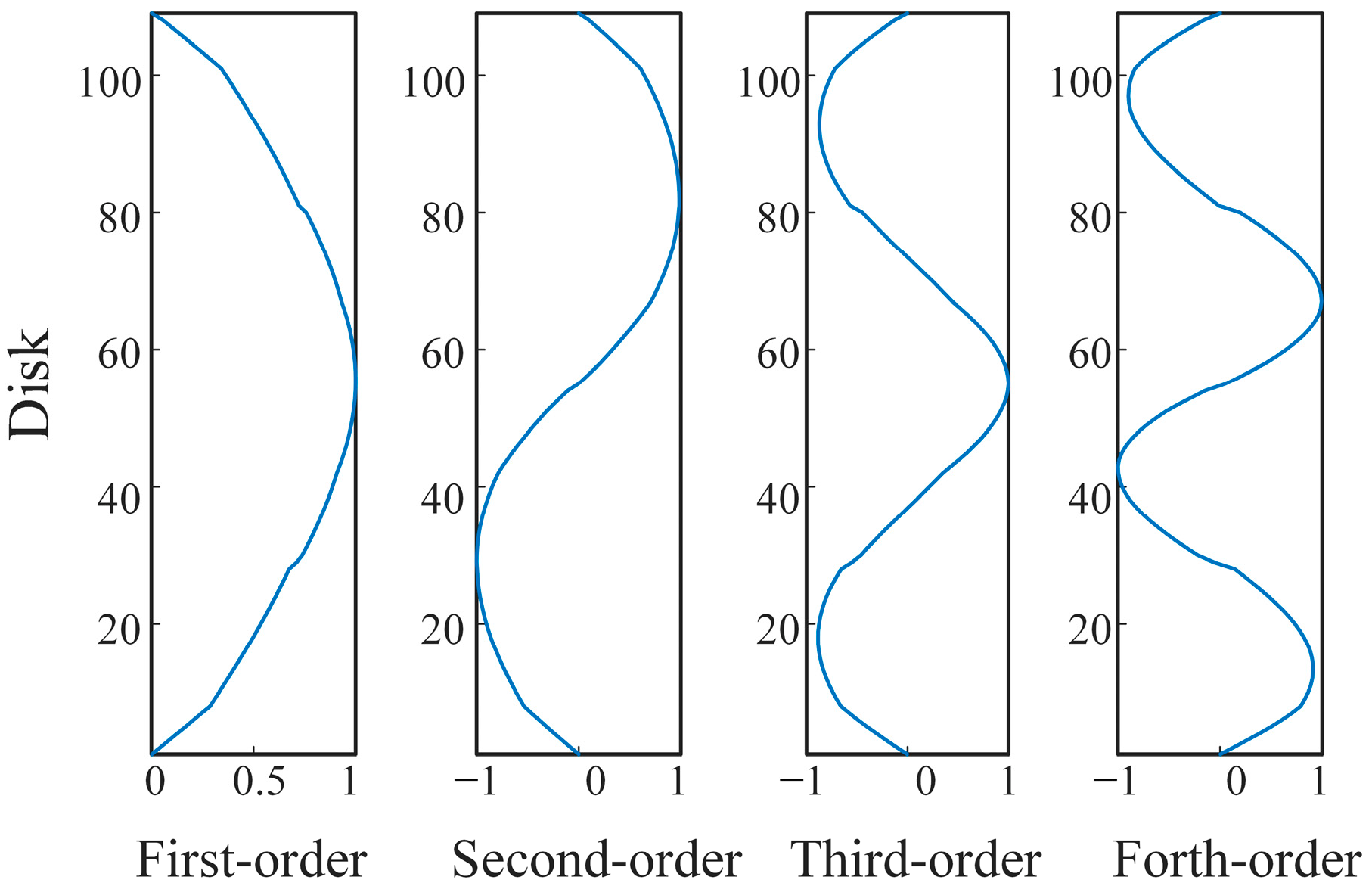
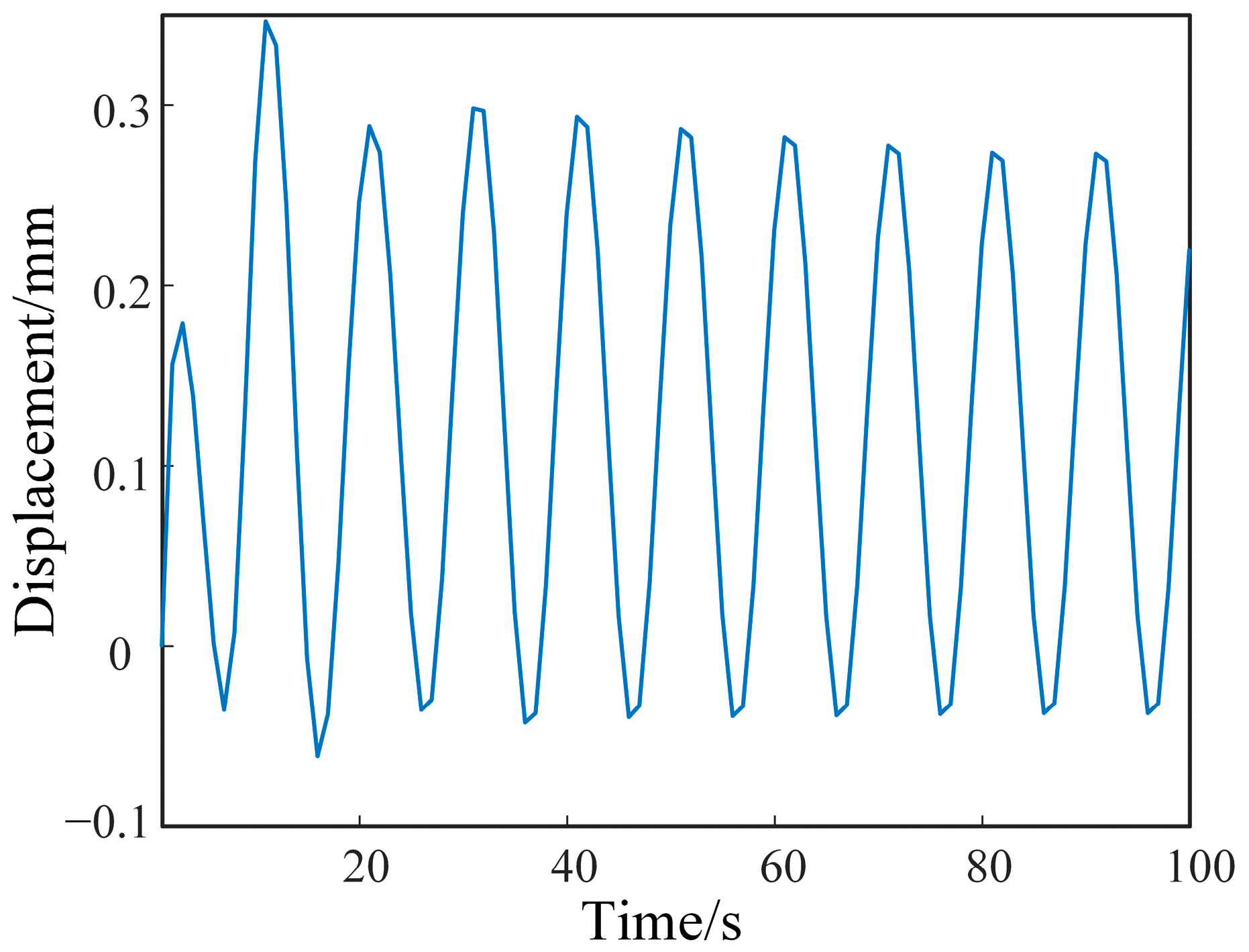
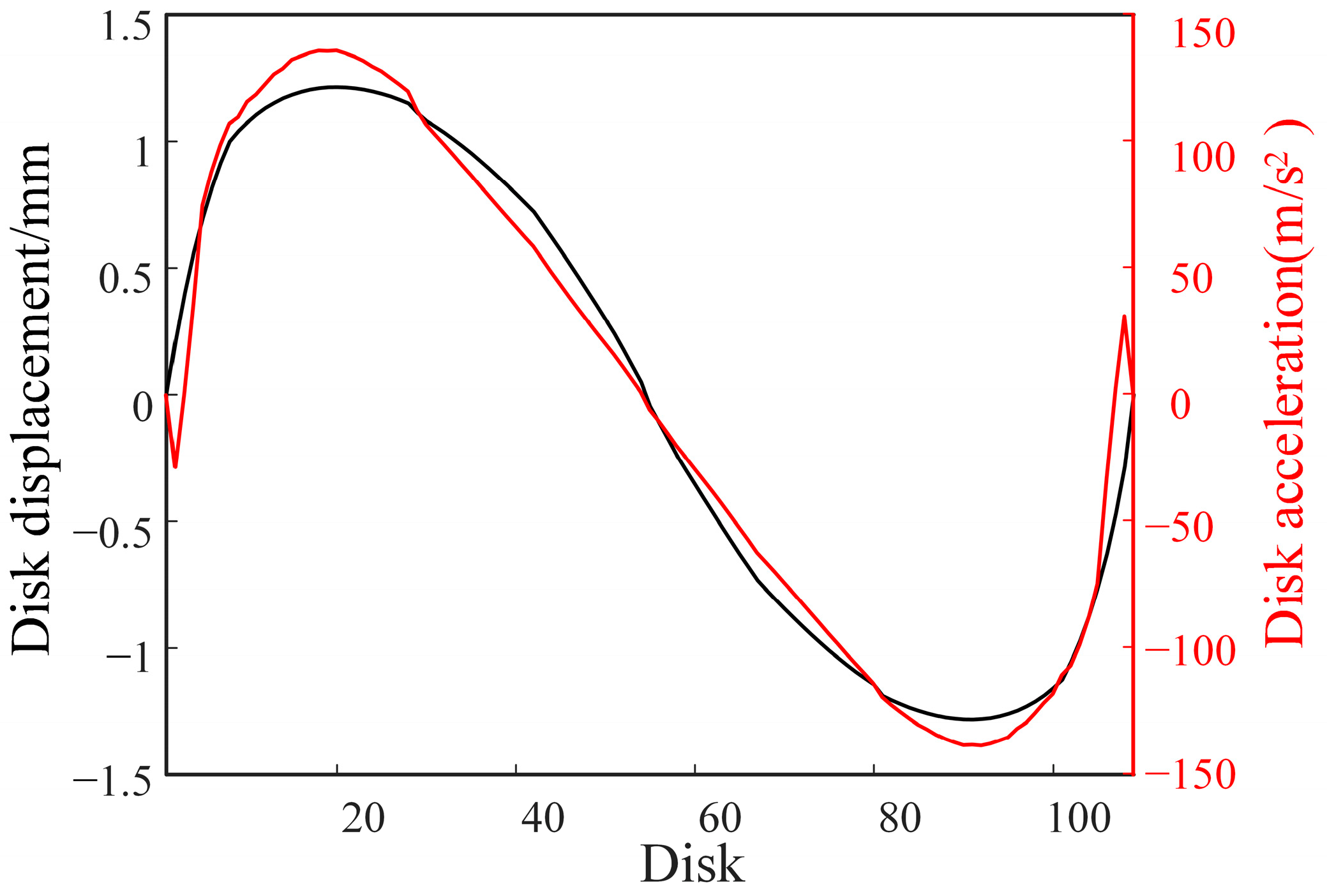
3.1. Characteristics of Winding Axial Vibration
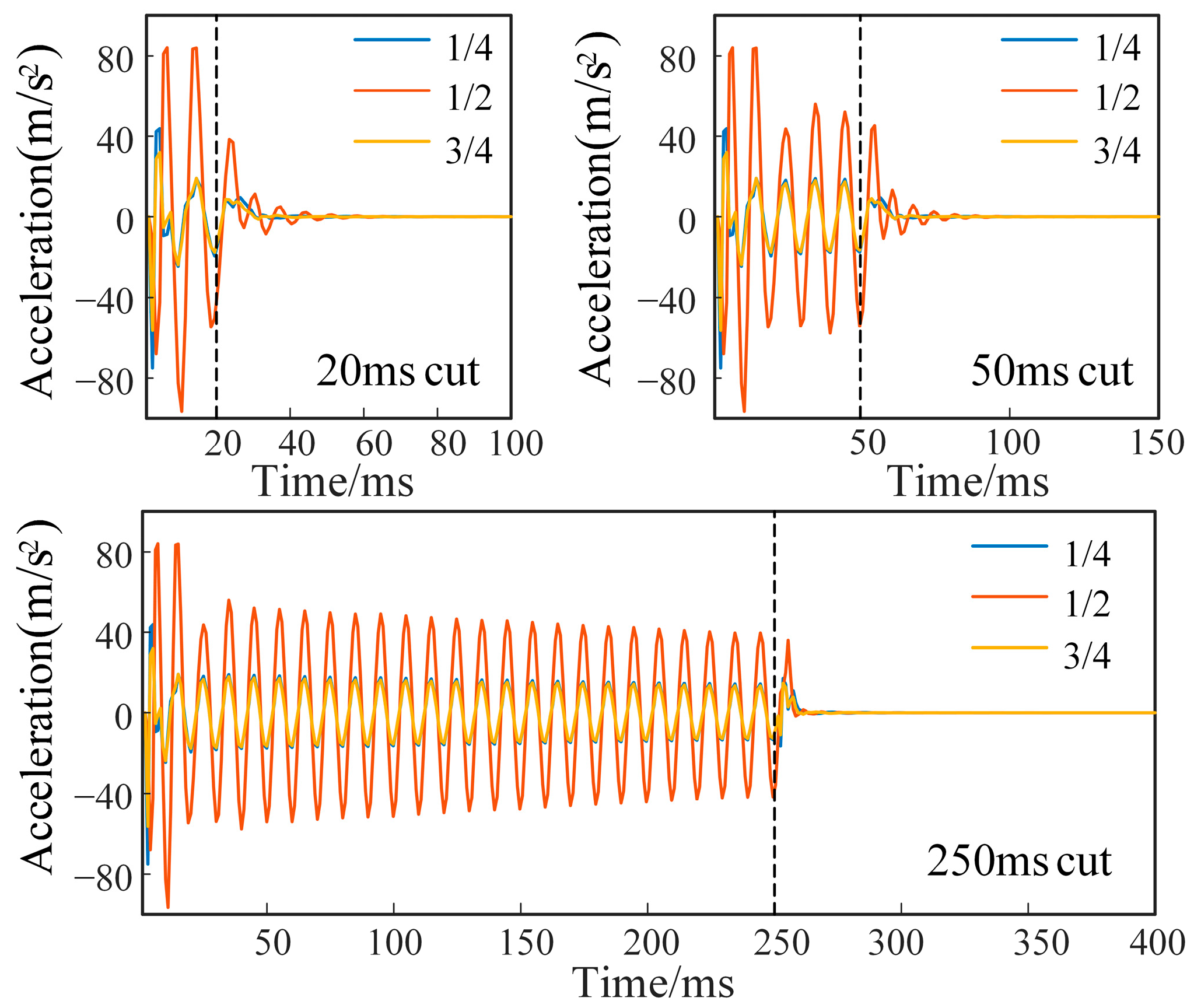
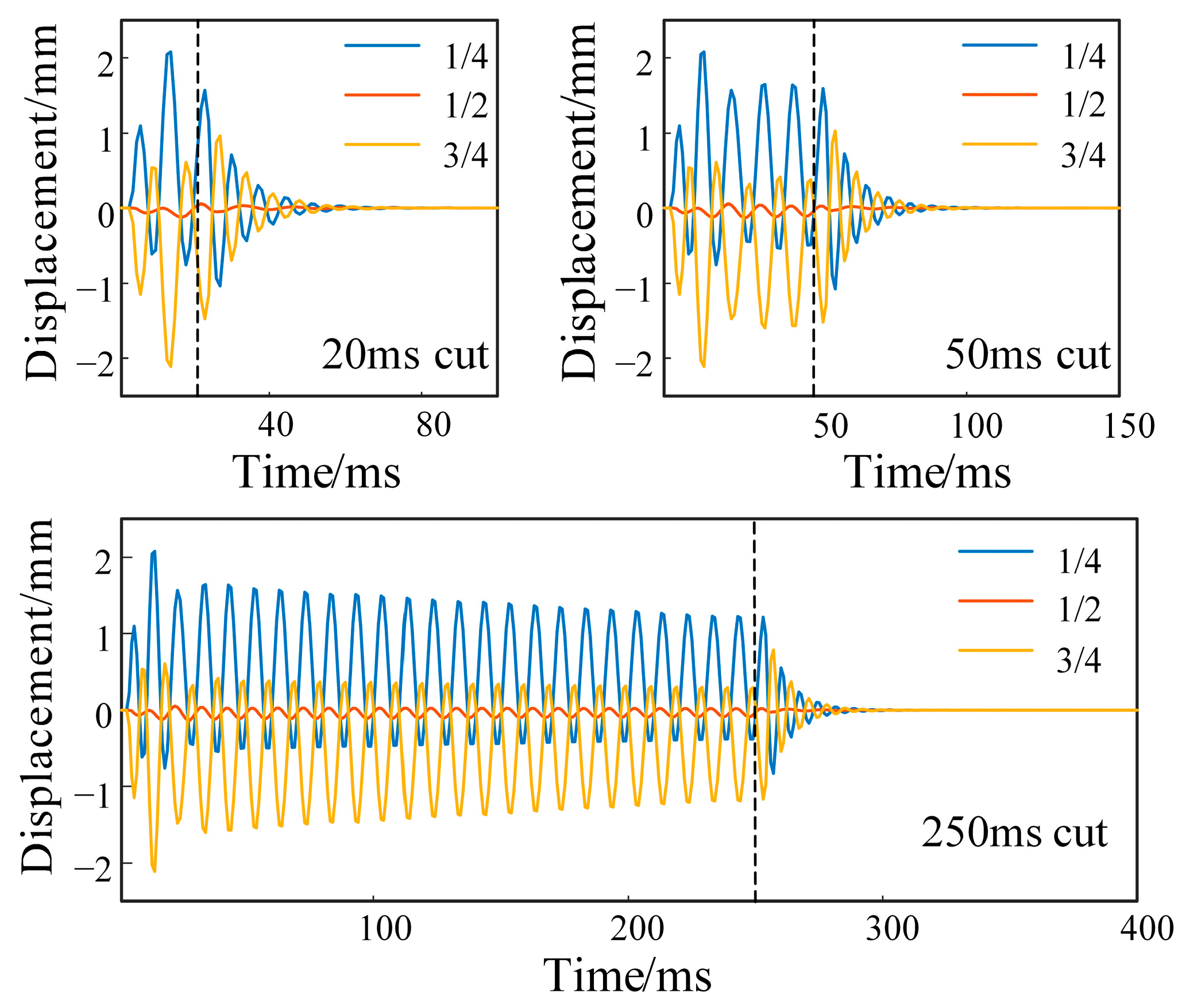
3.2. Vibration Response in Different Short Circuit Durations
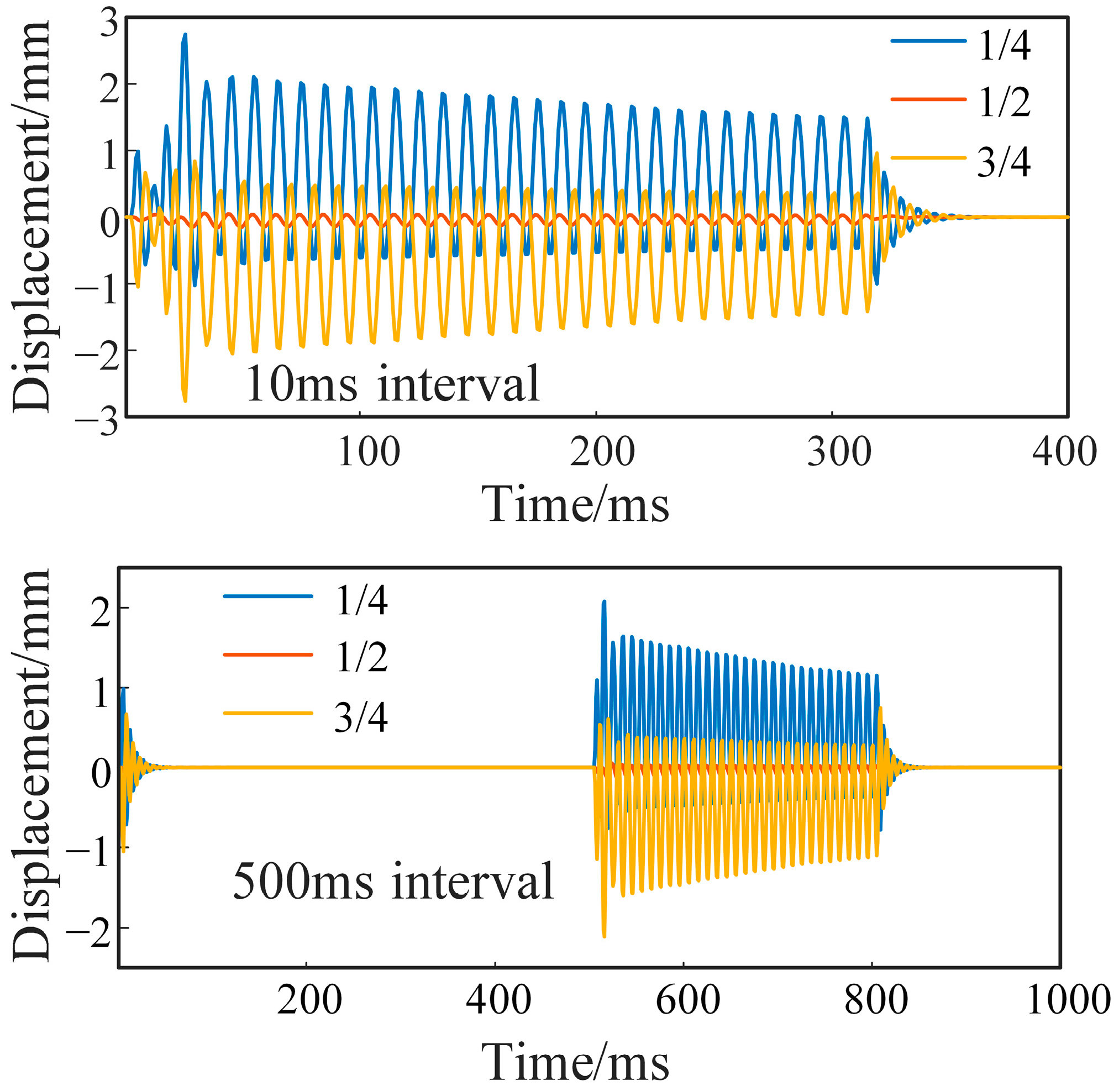
3.3. Vibration Response under Different Short Circuit Intervals
4. Evaluation of the Effect of Reclosing Time Interval on Short-Circuit Vibration
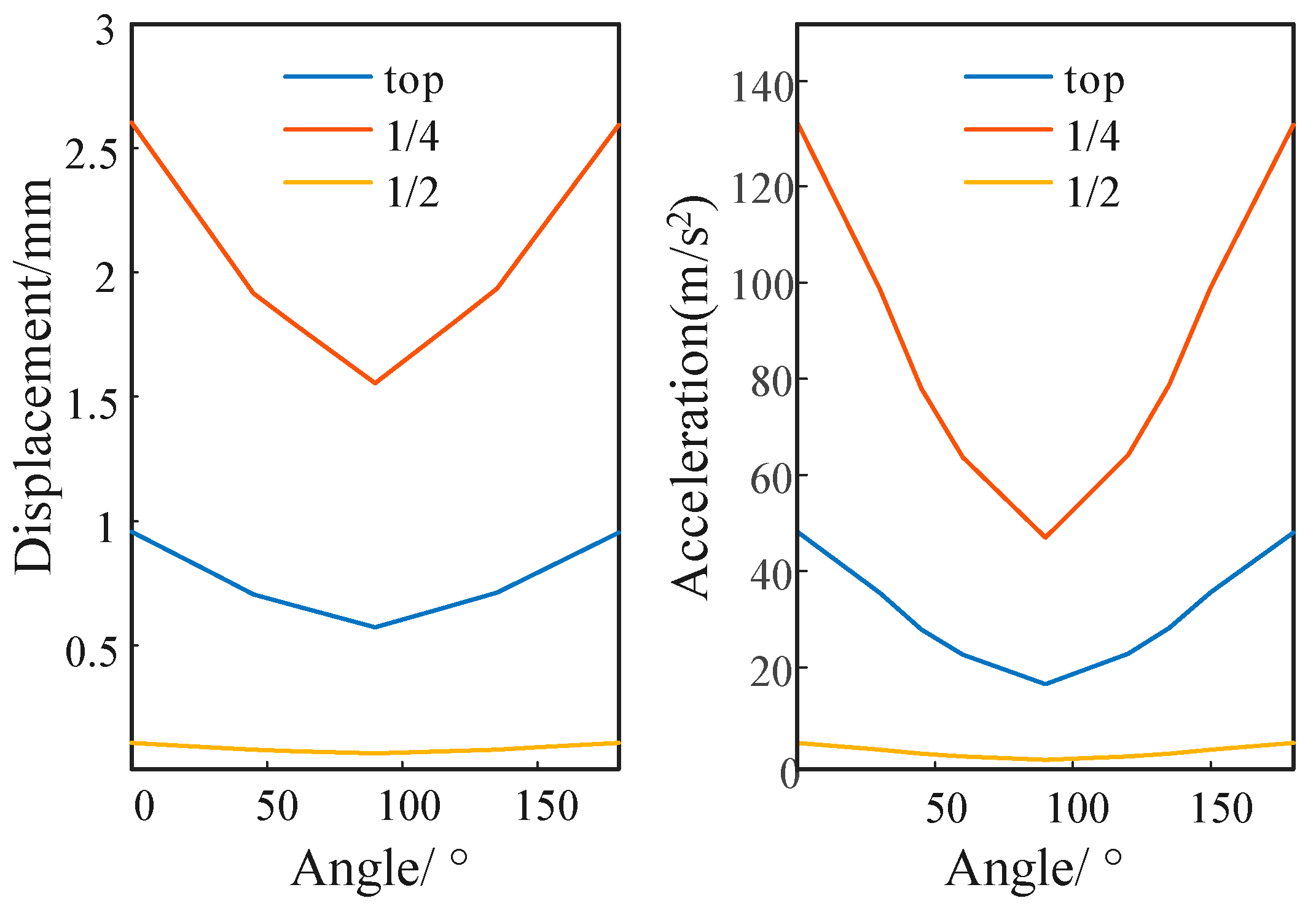
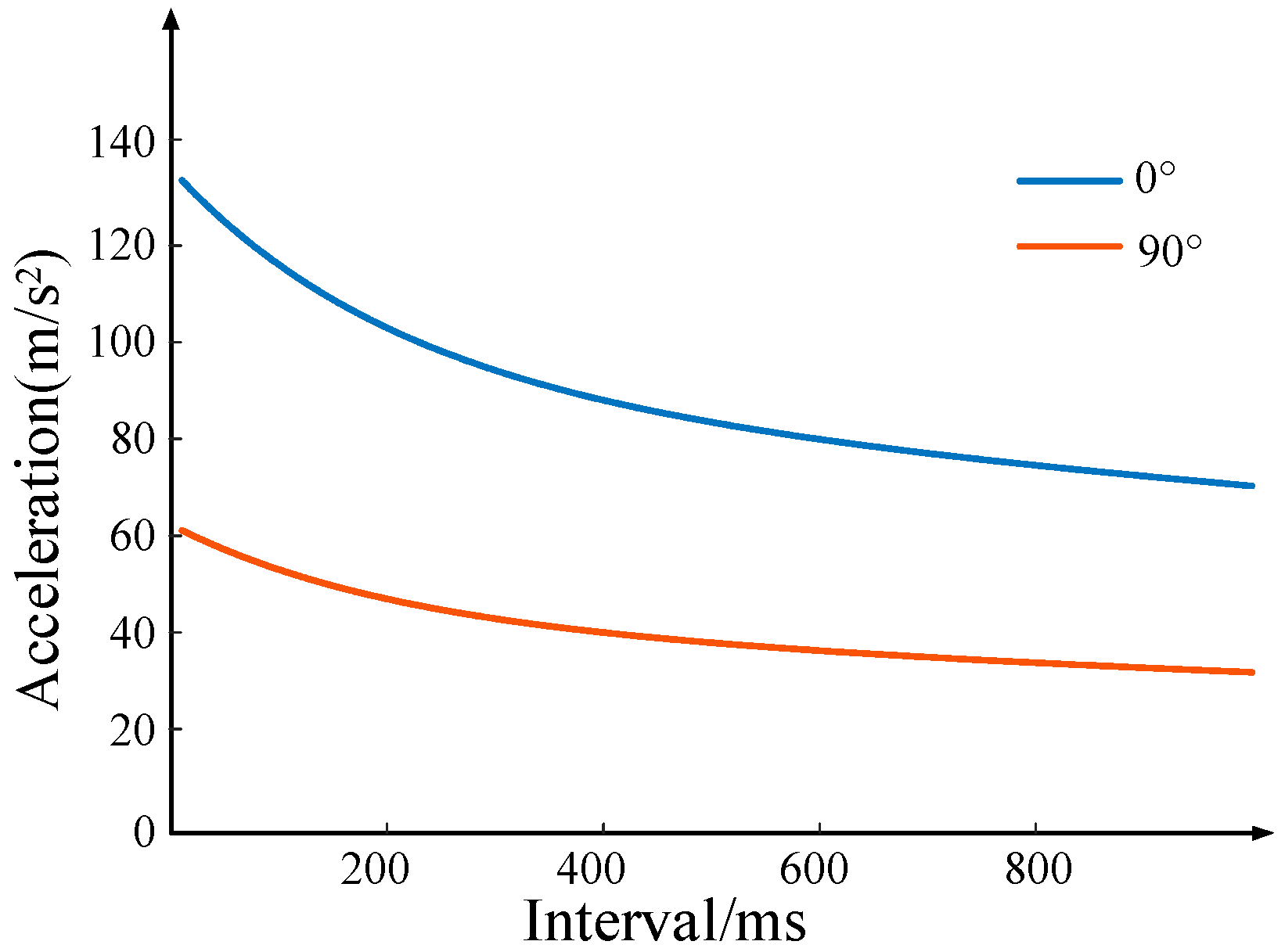
4.1. Acceleration Response of Transformer Winding at Different Reclosing Time Intervals
4.2. Calculation of Winding Response Variation at Different Reclosing Intervals
5. Conclusions
- When the transformer is subjected to a short-circuit impact, its vibration displacement and acceleration amplitude will change, and the vibration displacement change will be slower than the vibration acceleration. In the case of damped free vibration, the amplitude of the vibration displacement will decay to a relatively low level within 30 ms, and the vibration acceleration will decay to a relatively low level within 25 ms. The vibration acceleration will initially decay at a faster rate, reaching less than 10% of the peak value, but the effect of vibration persists.
- The response to short-circuit vibration has a period of 10 ms, which corresponds to the range of the current phase angle from 0° to 180°. As the reclosing time interval changes, the amplitude of winding vibration acceleration changes in the phase-angle ranges from 0° to 180°, and the winding vibration acceleration at phase angles of 0° and 180° is much greater than that at a phase angle of 90°. Due to the continuous influence of the last short-circuit vibration, the superposition effect of winding vibration in the second short circuit is more severe than that in the first short circuit. When the reclosing time interval is 10 ms, the peak value of reclosing vibration displacement is 2.74 mm, which is greater than the peak value of the first vibration displacement. At 250 ms, the peak value of secondary vibration displacement is reduced by 20%. In the same case, the peak acceleration of the secondary vibration is reduced by 37%.
- The equivalent amplification factor of the winding short-circuit current in the secondary closing under the superposition effect is considered by conversion. When the short-circuit time interval is short, the secondary short-circuit impact is equivalent to the larger short-circuit current effect in the primary short circuit. When the short-circuit time interval is more than 600 ms, the equivalent amplification factor of the closing short-circuit current is less than 1.041 under the ideal closing phase angle of 90° and the superposition effect is negligible.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, N.; Li, J.; Shao, L.; Liu, H.; Ren, L.; Zhu, L. Analysis of Interturn Faults on Transformer Based on Electromagnetic-Mechanical Coupling. Energies 2023, 16, 512. [Google Scholar] [CrossRef]
- Bagheri, M.; Zollanvari, A.; Nezhivenko, S. Transformer fault condition prognosis using vibration signals over cloud environment. IEEE Access 2018, 6, 9862–9874. [Google Scholar] [CrossRef]
- Wanchao, W. Research on Mechanical Strength and Stability of Transformer Windings under Multiple Short-Circuit Conditions. Ph.D. Thesis, Shenyang University of Technology, Shenyang, China, 2017. [Google Scholar]
- Sun, W.; Li, Y.; Lin, C.; Yang, X.; He, H.; Li, Z.; Liu, Y.; Sun, X.; Xiong, Z. Evaluation Method and Test Analysis of Accumulation Effect of Transformer Short-circuit. Guangdong Electr. Power 2019, 32, 137–144. [Google Scholar]
- Akre, S.; Fofana, I.; Yéo, Z.; Brettschneider, S.; Kung, P.; Sékongo, B. On the Feasibility of Monitoring Power Transformer’s Winding Vibration and Temperature along with Moisture in Oil Using Optical Sensors. Sensors 2023, 23, 2310. [Google Scholar] [CrossRef] [PubMed]
- Li, B. Research on the Mechanism of the Cumulative Effect of Power Transformers Short-Circuit Impact. Master’s Thesis, Huazhong University of Science & Technology, Wuhan, China, 2013. [Google Scholar]
- Zhang, F.; Wu, S.; Xu, Z.; Zhao, Z.; Sun, L.; Ji, S. Nonlinear Vibration Model of Transformer Windings and Their Vibration Characteristics During Multiple Short Circuits. High Volt. Eng. 2022, 48, 4882–4892. [Google Scholar]
- Zhang, F.; Ji, S.; Shi, Y.; Lu, W.; Li, D.; Chen, Y. Research on Transformer Winding Vibration and Propagation Characteristics. High Volt. Appar. 2019, 55, 2790–2798+2849. [Google Scholar]
- Secic, A.; Krpan, M.; Kuzle, I. Vibro-Acoustic Methods in the Condition Assessment of Power Transformers: A Survey. IEEE Access 2019, 7, 83915–83931. [Google Scholar] [CrossRef]
- Wang, H. Study of Short-Circuit Strength and Stability of Windings in Large Power Transformer. Ph.D. Thesis, Shenyang University of Technology, Shenyang, China, 2011. [Google Scholar]
- Li, H. Research on Electromagnetic Characteristics and Cumulative Effect of Large Transformer Windings under Multiple Short Circuit Conditions. Ph.D. Thesis, Shenyang University of Technology, Shenyang, China, 2018. [Google Scholar]
- Zhang, C. Research on Winding Deformation Characteristics of Power Transformer under Short-Circuit Conditions Based on Cumulative Effect. Master’s Thesis, Shenyang University of Technology, Shenyang, China, 2022. [Google Scholar]
- Du, J. Research on Dynamic Stability Analysis of Power Transformer Windings Based on Cumulative Effect. Master’s Thesis, Shenyang University of Technology, Shenyang, China, 2018. [Google Scholar]
- Wang, J.; Xing, Y.; Ma, X.; Zhao, Z.; Yang, L. Numerical Investigations for Vibration and Deformation of Power Transformer Windings under Short-Circuit Condition. Energies 2023, 16, 5318. [Google Scholar] [CrossRef]
- Hao, C.; Xinyu, D.; Ling, L.; Cai, W. Test and Analysis of Acoustic and Vibration Characteristics of Transformer in Winding and Iron Core Loose. In Proceedings of the 2023 IEEE 3rd ICPECA, Shenyang, China, 29–31 January 2023. [Google Scholar]
- Hong, K.; Huang, H.; Zhou, J. Winding condition assessment of power transformers based on vibration correlation. IEEE Trans. Power Del. 2017, 32, 1031–1038. [Google Scholar] [CrossRef]
- Wu, S. Research on Condition Monitoring and Fault Diagnosis of Power Transformer Based on Vibration Signal. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2009. [Google Scholar]
- Fan, Z.; Cheng, M.; Li, X.; Zhu, Y.; Ji, S. Dynamic Assessment of Windings Axial Mechanical Strength in Power Transformers Considering the Vibration Response. Proc. CSEE 2023, 43, 6494–6505. [Google Scholar]
- Gao, S.; Sun, L.; Tian, Y.; Liu, H. Research on the Distribution Characteristics of Transformer Axial Vibration under Short-Circuit Conditions Considering Damping Parameters. Appl. Sci. 2022, 12, 8443. [Google Scholar] [CrossRef]
- Li, Y. Calculation of the Windings Short-Circuit Force for Three-Winding Power Transformer. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, 2014. [Google Scholar]
- Zhang, B. Study on Dynamic and Thermal Stability of Power Transformer Based on Multi-Physical Fields Coupling. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2019. [Google Scholar]
- Zhang, S. Calculation on Short-Circuit Strength and Electromagnetic Force of Transformer Windings under Multiple Short-circuit Conditions. Master’s Thesis, Shenyang University of Technology, Shenyang, China, 2019. [Google Scholar]
- Wu, M. Radial Stability Analysis of Windings in Larger Power Transformer. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, 2014. [Google Scholar]
- Lu, G.; Hu, S.; Zhou, C.; Li, L. Calculation and Analysis of Axial Strength of Transformer Windings under Reclosing Short Circuit Shock. Transformer 2023, 6, 60. [Google Scholar]
- Witczak, P.; Swiatkowski, M. Transmission of Vibrations from Windings to Tank in High Power Transformers. Energies 2023, 16, 2886. [Google Scholar] [CrossRef]
- Zhang, F.; Ji, S.; Ma, H.; Saha, T.K. Operational Modal Analysis of Transformer Windings. IEEE Trans. Power Deliv. 2019, 35, 1285–1298. [Google Scholar] [CrossRef]
- Duan, X.; Zhao, T.; Liu, J.; Zhang, L.; Zou, L. Analysis of Winding Vibration Characteristics of Power Transformers Based on the Finite-Element Method. Energies 2018, 11, 2404. [Google Scholar] [CrossRef]
- Gao, S.; Zhao, J.; Meng, L.; Liu, H. Prediction of the Progressive Loss of Winding Clamping Pressure in Power Transformers. Math. Probl. Eng. 2020, 2020, 8401804. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, S.; Li, S. Cumulative Effect Analysis of Winding Deformation of Power Transformer under Multiple Short-Circuit. Transformer 2018, 2, 55. [Google Scholar]
- Zhang, H.; Yang, B.; Xu, W.; Wang, S.; Wang, G.; Huangfu, Y.; Zhang, J. Dynamic Deformation Analysis of Power Transformer Windings in Short-Circuit Fault by FE. IEEE Trans. Appl. Supercond. 2014, 24, 0502204. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| mt, mb/(kg) | 10.8 |
| m1–m107/(kg) | 53.8 |
| k7–k26, k80–k99/(N·m−1) | 3.86 × 109 |
| k27, k79, k107, kt, kd/(N·m−1) | 1.61 × 109 |
| k29–k40, k66–k78/(N·m−1) | 3.22 × 109 |
| k41–k49, k57–k65/(N·m−1) | 2.41 × 109 |
| k28/(N·m−1) | 2.15 × 109 |
| k53/(N·m−1) | 1.48 × 109 |
| kc/(N·m−1) | 1.38 × 1011 |
| Angle | 0° | 90° | |
|---|---|---|---|
| Interval | |||
| 50 ms | 132.02 m/s2 | 61.13 m/s2 | |
| 200 ms | 107.16 m/s2 | 48.97 m/s2 | |
| 400 ms | 92.21 m/s2 | 42.19 m/s2 | |
| 600 ms | 84.93 m/s2 | 38.37 m/s2 | |
| Interval/ms | 50 | 200 | 400 | 600 | 1000 |
|---|---|---|---|---|---|
| Reclose at 0° | 1.391 | 1.252 | 1.134 | 1.051 | 1 |
| Reclose at 90° | 1.383 | 1.244 | 1.128 | 1.041 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Gao, S.; Tian, Y.; He, R.; Teng, F.; Wang, L.; Geng, J.; Wang, P.; Wang, X.; Zhang, Z.; et al. Effect of Multiple Reclosing Time Intervals on Axial Vibration of Winding. Appl. Sci. 2023, 13, 11910. https://doi.org/10.3390/app132111910
Sun L, Gao S, Tian Y, He R, Teng F, Wang L, Geng J, Wang P, Wang X, Zhang Z, et al. Effect of Multiple Reclosing Time Intervals on Axial Vibration of Winding. Applied Sciences. 2023; 13(21):11910. https://doi.org/10.3390/app132111910
Chicago/Turabian StyleSun, Lu, Shuguo Gao, Yuan Tian, Ruidong He, Fuyun Teng, Liang Wang, Jianghai Geng, Ping Wang, Xinyu Wang, Zikang Zhang, and et al. 2023. "Effect of Multiple Reclosing Time Intervals on Axial Vibration of Winding" Applied Sciences 13, no. 21: 11910. https://doi.org/10.3390/app132111910
APA StyleSun, L., Gao, S., Tian, Y., He, R., Teng, F., Wang, L., Geng, J., Wang, P., Wang, X., Zhang, Z., Zhu, J., Yao, J., & Yao, Y. (2023). Effect of Multiple Reclosing Time Intervals on Axial Vibration of Winding. Applied Sciences, 13(21), 11910. https://doi.org/10.3390/app132111910