1. Introduction and Related Work
In recent years, drones have aroused the interest of the scientific community as they offer huge potential in many civil applications [
1,
2], such as first aid in natural disasters or inspection to prevent forest fires [
3,
4,
5]. With the evolution of technology, the miniaturization of electronics, and the increase in the processing power of on-board systems, it is currently possible to carry out complex missions with small and inexpensive drones, or even fleets of drones [
6,
7]. Drone fleet missions have proven to be more efficient in terms of scalability, survivability, and rapid response. However, swarm flight poses several research problems. The most important is undoubtedly the localization of drones in a global or relative reference system. Depending on the type of environment (indoor, outdoor, industrial [
8], etc.), but also on the type of system to be localized, there are different levels of localization complexity [
9].
GNSS (Global Navigation Satellite System) positioning, such as GPS, is the most commonly used solution for outdoor localization [
10]. However, the localization accuracy may be insufficient, especially for missions operated in swarms, or simply ineffective in indoor environments. To overcome this limitation, other localization systems can be used such as cameras [
11] and inertial measurement systems [
12]. Some promising methods use RF chips implementing different standards such as RFID, Bluetooth [
13], or WiFi [
14,
15]. Since these methods are low-cost, require low processing power, and have a long range [
16], this article will focus on RF-based methods. The best known RF technique is the Received Signal Strength Indicator (RSSI) [
17,
18,
19,
20]. Knowing the power emitted and the propagation attenuation model makes it possible to calculate the propagation distance. With the use of specific antennas, it is possible to obtain the Angle of Arrival (AOA) of the transmitted wave and to obtain the position by triangulation. Using the propagation speed, travel time measurement techniques such as Time of Arrival (ToA) or Time Difference of Arrival (TDoA) [
21,
22,
23,
24] allows one to obtain the position with a trilateration calculation. In particular, TDoA-based ultra-wideband (UWB) sensors are very popular [
25,
26] as they allow very accurate distance measurements at a relatively low cost.
RF-based positioning can be solved analytically [
27,
28,
29,
30] when exact models are known or using numerical optimization methods. Several optimization algorithms can be found in the literature [
31] to solve multilateration. It should be mentioned that the computation may be difficult due to the non-linearity and/or non-convexity of the estimation problem, potentially leading to local minima or divergence. An interesting approach [
32], based on a variant of the original Space Alternating Generalized Expectation Maximization (SAGE) algorithm [
33], leads to the joint estimation of the Direction of Arrival (DoA), time-delay, and range estimation, aiming to improve the estimation accuracy of communicating vehicles.
This work deals with the multilateration localization problem in non-GPS environments, using UWB relative distance measurements whose anchoring positions are unknown or are known but with uncertainties. We address the problem of localization in different scenarios, including (i) the positioning of a fleet of drones based on RF measurements to anchors with poorly known positions; (ii) estimating the position of UWB anchors based on the distances measured to one or more drones located by on-board sensors; and (iii) simultaneously combining the two estimates of the positions of the anchors and the drones to improve the localization accuracy of the system as a whole. The estimation problem is solved using gradient-descent-based optimization while considering different formulations for the cost functions and proposing a new adaptation.
The rest of the paper is organized as follows.
Section 2 presents a unified formulation of the estimation problem we address. To solve this problem, different formulations of the gradient descent-based optimization are presented in
Section 3. Then, in
Section 4, simulation results are described and analyzed before concluding this work in
Section 5.
2. Problem Statement
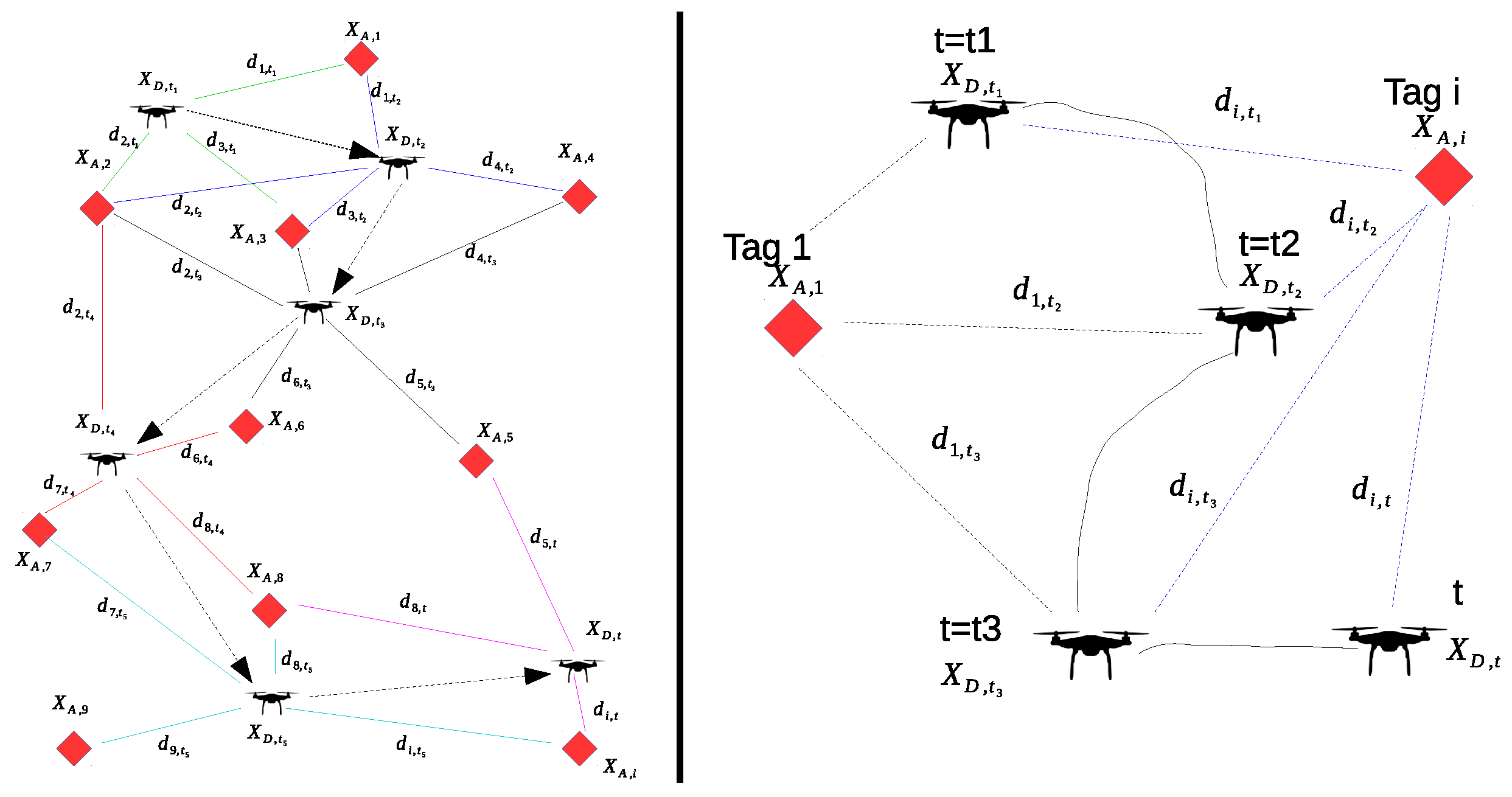
Trilateration, and more generally, multilateration, is an important technique for 3D position estimation using distance measurements to four or more anchors with known position coordinates. Multilateration localization is used here to co-estimate the 3D positions of a set of fixed nodes and mobile agents (drones) capable of taking relative distance measurements in various scenarios. The first scenario consists in retrieving unknown 3D positions of a set of mobile agents given their relative distance measurements to a set of known anchors (
Figure 1a). The second scenario (
Figure 1b) consists of retrieving the 3D positions of a set of anchors using a set of mobile agents. In this case, an estimate of the positions of the mobile agents is assumed to be given using on-board sensors. The third scenario is a hybrid case where recovered positions of the anchors will improve the localization of moving agents. It deals with the problem of simultaneously obtaining an accurate estimation of the positions of drones and the active fixed sensors.
This work gives a unified formulation to these scenarios, and solves the multilateration estimation problem with and without taking into account noisy range measurements and location uncertainties.
In the following, each agent or active sensor node i of unknown position will be referred to as , denoting its 3D coordinates in a global reference frame and having distance measurements to neighboring nodes with known position coordinates, denoted as .
Position/distance constraints can be formulated by (
1) expressing that any node
i of unknown an 3D position,
, lies at the intersection of
circles centered on the detected neighboring nodes with known positions and having the estimated range
as their radii:
This leads to a nonlinear least squares problem that can have multiple local minima. The authors [
34] have proposed a solution to the convex relaxation of this problem, but there will still be no guarantee that the solution will be optimal. Another way to solve this problem is to consider a linear solver by forming differences between pairs of these equations leading to the deletion of quadratic terms in (
1). For instance, by subtracting the last component
from all others in (
1), the problem (
1) can then be rearranged and reformulated as follows:
where
Note that the matrices and are expressed only as a function of neighboring nodes whose positions and relative distance measurements are known.
Several methods have been proposed to solve the estimation problem (
2). It could be solved using either the least squares approximation or other algebraic methods since, in the general case, the matrix
is not necessarily square (depending on the number of neighboring nodes with known positions). This provides an exact solution if it exists and an approximate solution otherwise. To be noted, the matrix
is singular, and the solution does not exist if all the neighboring nodes are collinear. If the measured distances are disturbed by measurement noise, the equalities in (
1) and (
2) would no longer hold. The problem of finding the unknown positions of the nodes is then approached by forming the residuals of the system and then minimizing a cost function of these residuals. In the following, we study different formulations of the estimation problem with noisy range measurements, harnessing different cost functions to minimize the localization error. They are summarized below in (
3)–(
6) and will be thoroughly discussed under different conditions in the following sections.
Definition 1 (Problem 1). The optimal estimate of the unknown position of a node i, having measurements to nodes with known positions, is usually given by: This is a nonlinear optimization problem aimed at minimizing the sum of the squares of the residuals between the measured distances and the hypothetical distances based on the known location of nodes.
Definition 2 (Problem 2). An alternative formulation to the cost function (3) could be defined by the following to provide an optimal node location estimate: This still leads to a nonlinear, nonconvex optimization problem, aiming to minimize the quadratic error between the squared measured distances and the squared relative positions of the nodes.
The formulations (
3) and (
4) do not explicitly take into account uncertainties. However, the nodes of known positions could be affected by uncertainties, and the acquired distances are also affected by measurement errors. In these cases, the previous problems are modified to include position and measurement errors and are formulated as follows:
Definition 3 (Problem 3). In the presence of positioning and measurement errors, the optimal estimate derived from (3) is given by:whereanddenote the position and range measurement errors, respectively. Definition 4 (Problem 4). The alternative formulation derived from (4) of the cost function while including position and measurement errors leads to the optimal estimate: Localization by multilateration consists of solving one of the previous formulations of the optimization problems (
3)–(
6), which differ mainly by the cost functions used and by considering explicitly or not the uncertainties in the position of the anchor nodes and the range measurements. These formulations are of great importance and will impact not only the precision of the solution, but also the computation time and even the possibility of finding a solution to the localization problem.
3. Multilateration Estimation Resolution
Gradient descent (GD) is one of the most used algorithms for many recent applications [
35,
36] due to its simplicity and computational efficiency in optimizing an objective function. We consider in this work two variants of GD methods to solve multilateration problems (
3)–(
6) based on fixed or variable rates in the gradient descent step. We also introduce a revisited formulation of the variable step descent. Indeed, it is well known that choosing a proper descent step can be tricky. Too small a descent step leads to slow convergence, while a too large descent step can hinder convergence and cause the utility function to fluctuate around the minimum or even diverge. Some approaches [
37] use Line Search methods or variants, solving a second iterative optimization problem under specific conditions to find an appropriate fixed step length.
To solve problems (
3)–(
6), starting from an initial guess
of a node position
, a sequence of solutions is produced iteratively by:
where
is the position estimate at iteration
k,
is the gradient of the utility function, and
is the gradient descent step defined by Equation (
8).
could be constant in a fixed step descent or, depending on
H, the Hessian matrix of the utility function. The proposed revisited formulation introduces a damping parameter
in the variable step rate:
These methods are implemented and evaluated in the next section, with the objective of finding the optimal parameters and conditions necessary to solve the cases presented by the localization scenarios.
Table 1 summarizes the different combinations with the evaluated parameters.
4. Simulation Results
To evaluate the resolution methods with respect to the formulations considered, we carry out extended statistical analyses by varying the number of neighboring nodes and the parameters of the algorithms. The simulation environment is a simulated 3D space of 100 m × 100 m × 50 m ( dimensions, respectively) centered on a global reference frame with the origin . It contains a large population of randomly distributed fixed nodes (anchors) and a set of drones with predefined trajectories. For each test scenario, multilateration localization is solved for 100 randomly selected nodes with unknown positions, using randomly selected neighboring nodes of known coordinates and 100 random initial guesses to start the execution of the algorithm. The random character also makes it possible to evaluate the impact of the distribution and the relative positioning of the nodes. They are only constrained to have a minimum relative measurement distance of 1 m. This leads, for each test scenario, to 10,000 simulation tests, run under Matlab on a Linux Ubuntu 16.04 OS with 16 GB of memory and an Intel Core i7-4710MQ processor (using a single 2.5 Ghz core for the simulations).
For the estimation problems (
5) and (
6) expressing uncertainties, the errors on the assumed known positions of the nodes are modeled by a Gaussian noise centered on the real position of the simulated nodes with a standard deviation
determined empirically. Measurement errors are modeled based on the approximation given in (
10) [
38] and confirmed by our experimental study using UWB sensors in indoor and outdoor environments:
with the following experimentally identified parameters:
4.1. Fixed-Step GD Estimation
Solving a multilateration problem with fixed-step gradient descent can diverge if the step is too large or slow down convergence considerably if it is too small. At the expense of additional optimization cost, some authors [
37,
39] have proposed to use the backtracking line search algorithm, thus solving an additional optimization problem in order to define a suitable step length that satisfies certain conditions. Here, we propose performing a statistical analysis to determine a good approximation of the best fixed-step descent parameter for each formulation of the estimation problems (
3)–(
6).
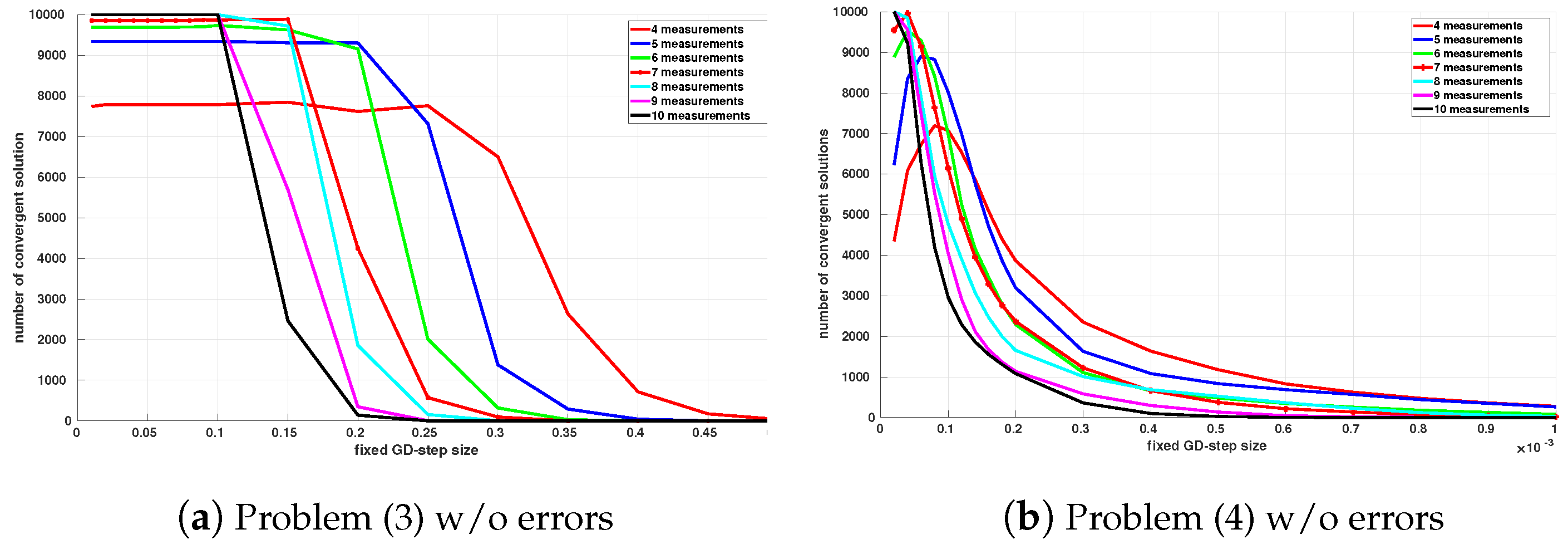
The convergence results for the formulations (
3) and (
4) (without explicitly considering position and range measurement noises) are presented in
Figure 2. A solution is considered convergent if the positioning error, i.e., the Euclidean distance between the real position of the target and its estimate, is less than 20 cm. Obviously, it can be noted that increasing the fixed descent step length reduces the convergence rate, in particular when the number of neighboring nodes used in the estimation increases. Therefore, by reducing the descent step, the convergence rate is increased. Using problem formulation (
3), notice the appearance of a plateau whose value depends on the number of neighboring nodes used in multilateration. This means that below a certain value, it is useless to continue to decrease the step of descent, which will lead to increasing the computation time without improving the convergence success. It should be noted that these "plateau" values will be chosen as fixed parameters of the descent step in the comparative simulations. It can also be noted that increasing the number of measurements improves the convergence rates up to a certain threshold (here, 8), beyond which no improvement is detected. Similar observations can be made for the problem formulation (
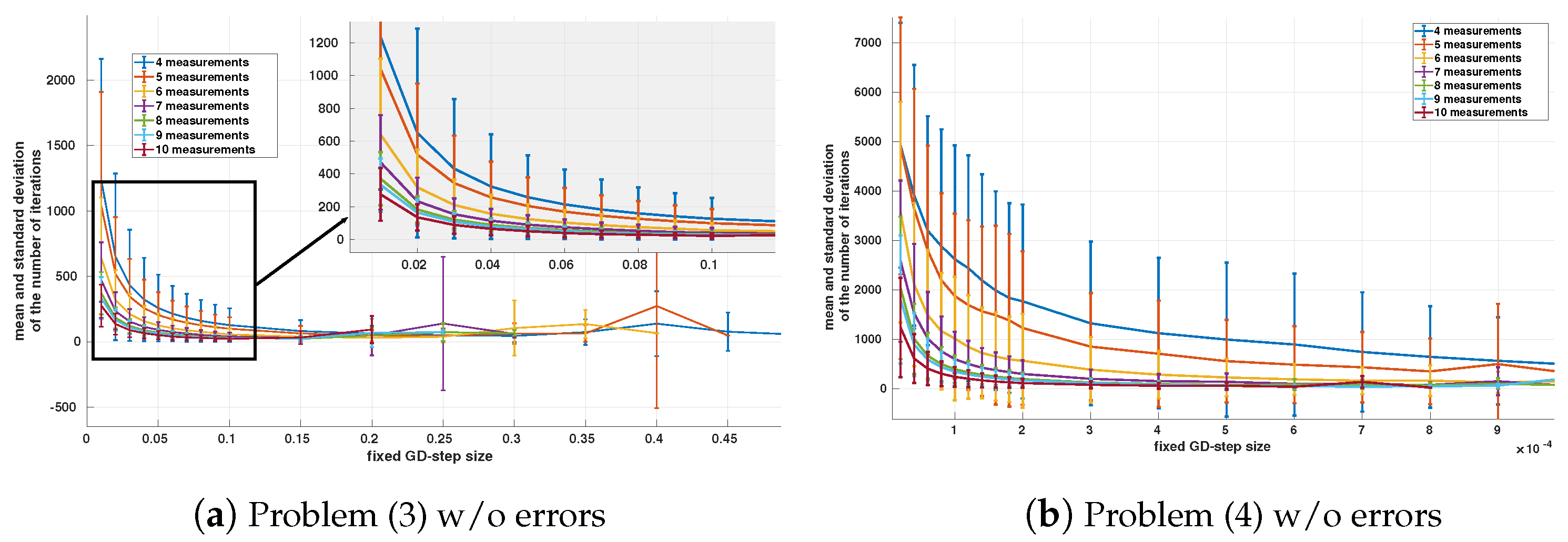
4), noting that convergence for very small step values is extremely slow and the algorithm stops after exceeding the maximum number of iterations. The number of iterations until convergence for both formulations is given in
Figure 3 and confirms this observation. It can be concluded that for equivalent performances, problem formulation (
4) converges much more slowly than (
3).
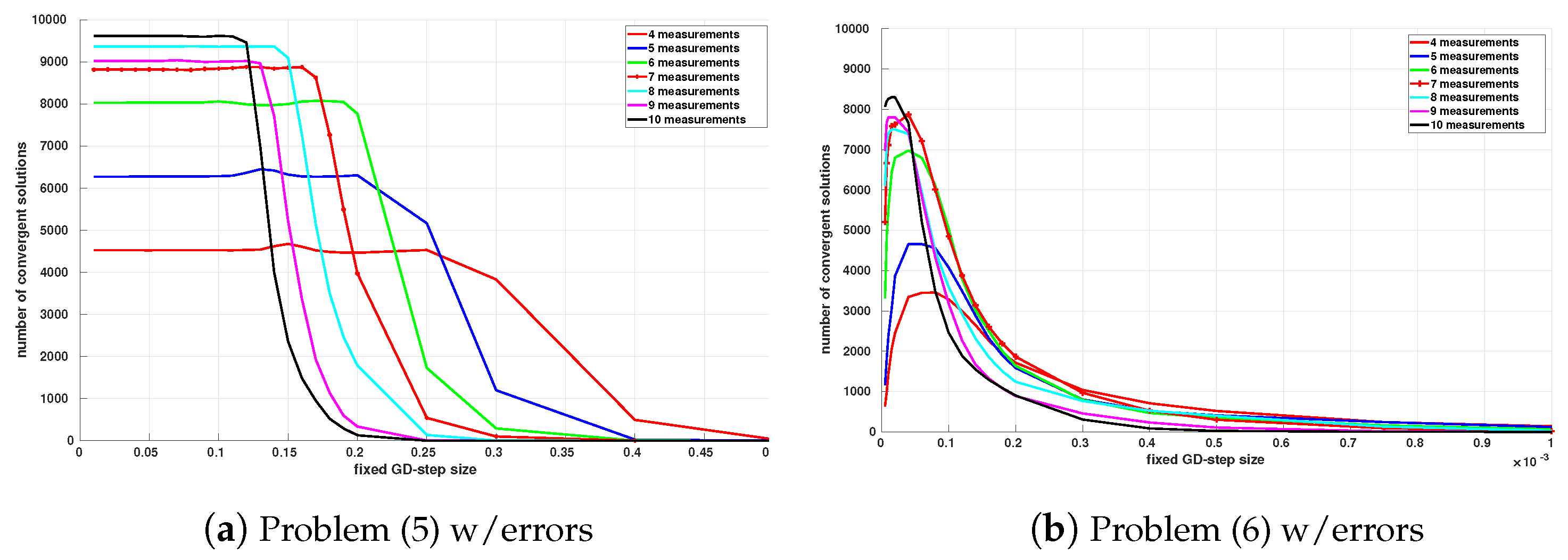
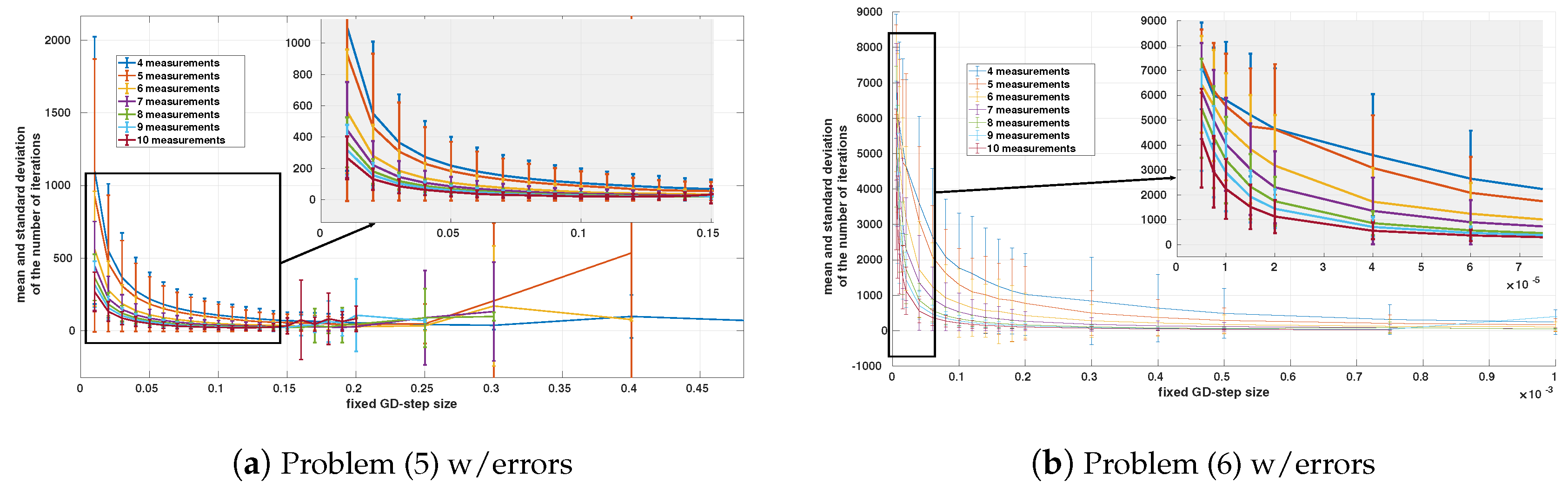
The same tests are carried out by incorporating in the cost functions the position (
9) and the measurement (
10) error models in the estimation problems (
5) and (
6).
Figure 4 and
Figure 5 give the results of convergence and the number of iterations until convergence over 10,000 simulations for the two formulations and for a different number of neighboring nodes, depending the length of the fixed step and the number of distance measurements.
The profiles of the curves are similar to the results of the formulations without error models; the only changes are a decrease in performance due to the integration of errors, which impacts situations with a low number of measurements more significantly. It can also be noticed that the plateau levels are close to the previous values, and at equivalent performance, the numbers of iterations at convergence are lower for the formulation (
5) compared to (
6).
4.2. Variable-Step GD Estimation
An alternative approach to fixed-length step descent is to adapt the rate step to the normalized gradient, as defined by (
8). The same scenarios from the previous tests are reconsidered using the variable-step descent algorithm. The simulation results showed a very weak convergence (around 20%) with all the formulations of cost functions, with and without explicit incorporation of error models. This observation motivated us to investigate the problem and led us to reformulate the gradient step by introducing a damping parameter
, as defined in (
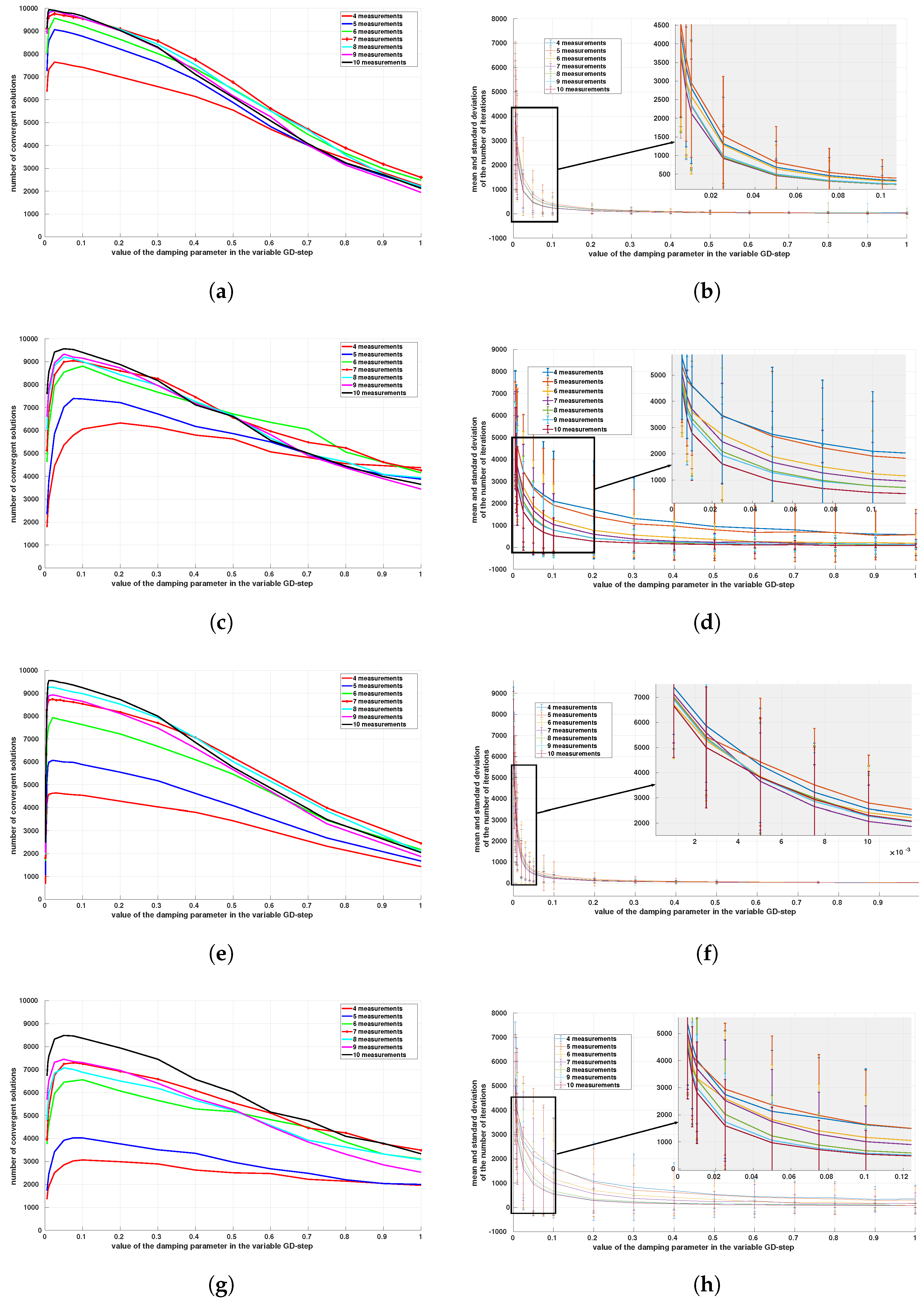
8). The results are shown in
Figure 6, with and without position and measurement errors. Note that
corresponds to the classical formulation of the variable-step descent (i.e., without damping).
First, one can notice the increase in convergence rates with the number of relative measurements used in the estimation. This is particularly noticeable for a small number of measurements. Moreover, when the number of measurements exceeds seven, the convergence rate varies very little. Another point to note is the impact of the value of the damping parameter
. Indeed, using a value close to
for the optimization problem (
3) gives better results than the classical variable step (
) for any number of measurements.
The analysis of the number of iterations until convergence (second row of
Figure 6) shows that reducing the damping parameter improves the convergence results but, consequently, also increases the number of iterations to convergence. For instance, a value
leads to 95% of convergent estimates in less than 500 iterations for optimization problem (
3). Similar results are shown for the optimization problem (
4) with a slight decrease in performance. It therefore appears more interesting to use the cost function (
3) with value
in the case of an adaptive descent with free-error models. While integrating positioning and measurement error models into the formulations, the curves also confirm these trends with a slight drop in performance. This confirms that the cost function (
5) seems to give better results than (
6), and that a damping value of
is an appropriate choice, even with positioning and measurements errors.
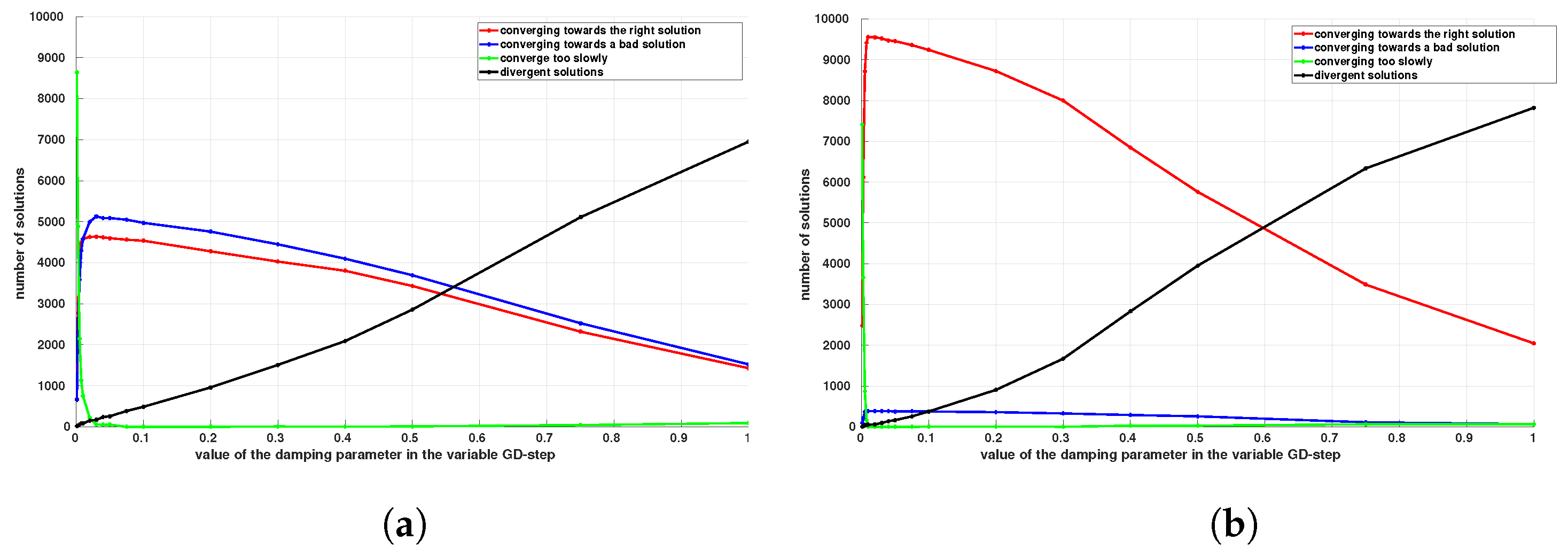
Further analysis of the adaptive step descent is carried out in
Figure 7, revealing different cases of convergence of the algorithm:
(i) the algorithm converges towards the correct estimate;
(ii) the algorithm converges towards an erroneous estimate corresponding to a local minimum;
(iii) the algorithm does not have time to converge and reaches the maximum number of iterations; and finally,
(vi) the algorithm diverges. The results in
Figure 7 are given for the estimation problem (
5), including position and measurement errors, based on measurements acquired from 4 and 10 neighboring nodes, but similar results have been observed for the other cases. They clearly indicate the importance of increasing the number of measurements to improve the convergence of the algorithm to correct solutions. Convergence to local minima solutions is greatly reduced when using a significant number of relative measurements in the estimation. A clear improvement can be noticed when the damping parameter is used in the gradient descent step. It should be noted that the number of situations where the slow convergence of the algorithm does not lead to any solution is very limited except for very small values of the damping parameter which will obviously not be used. These results clearly show the relevance of introducing a damping parameter whose value could be suitably chosen according to the number of measurements available or desired for the estimation.
Finally, more detailed and comparative results revealing the average behavior over 10,000 simulations of each multilateration formulation scenario are summarized in
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8. They are compared with respect to the localization errors versus the ground truth positions of the nodes, the average rate of convergence, and the computation time for the different formulations of the estimation algorithms.
4.3. Towards Realistic Experimental Scenarios
To conclude this study, we perform a realistic simulated scenario using a fleet of drones and a set of fixed anchors to evaluate the efficiency of solving the localization problem by multilateration of anchors and drones based on distance measurements. In this scenario (
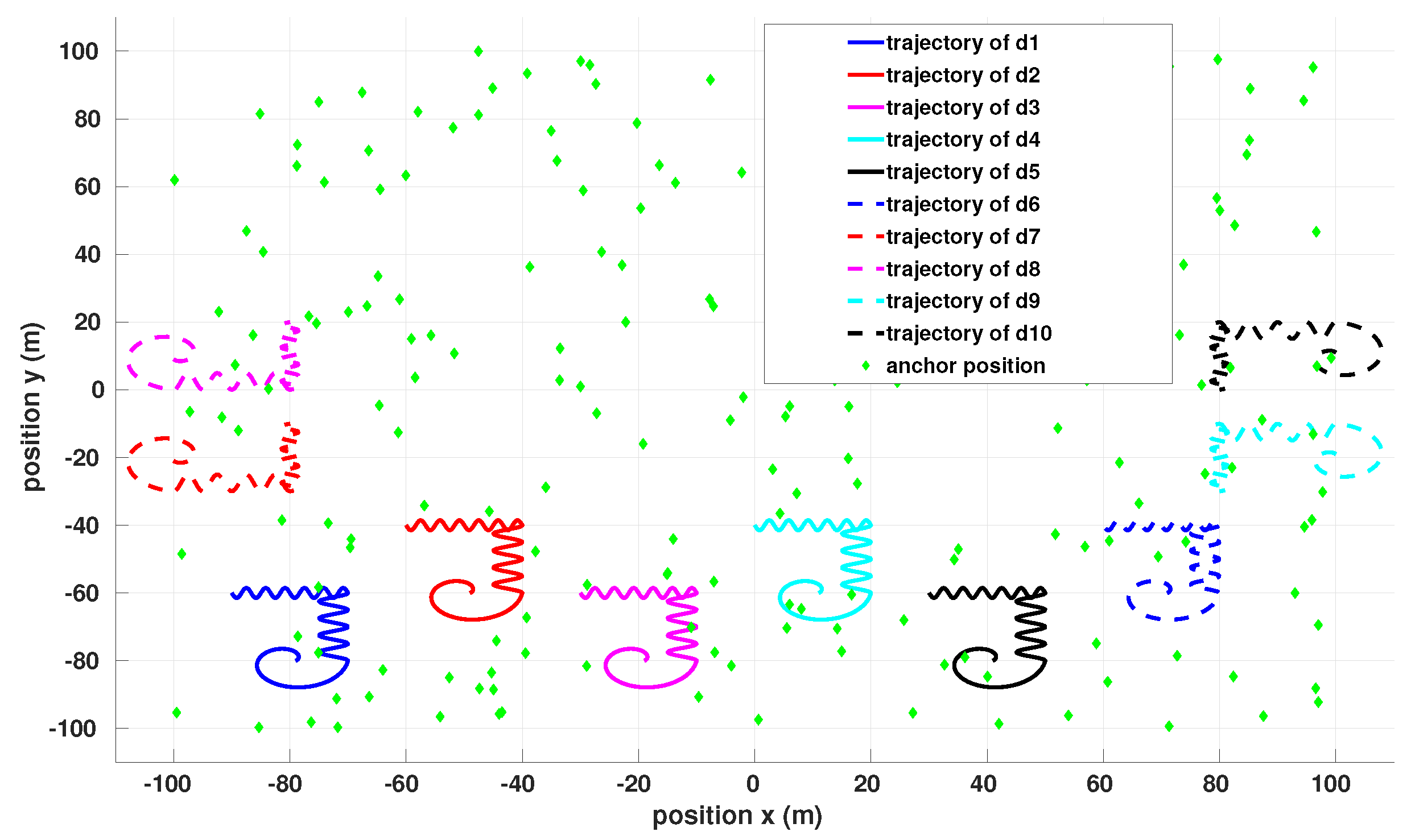
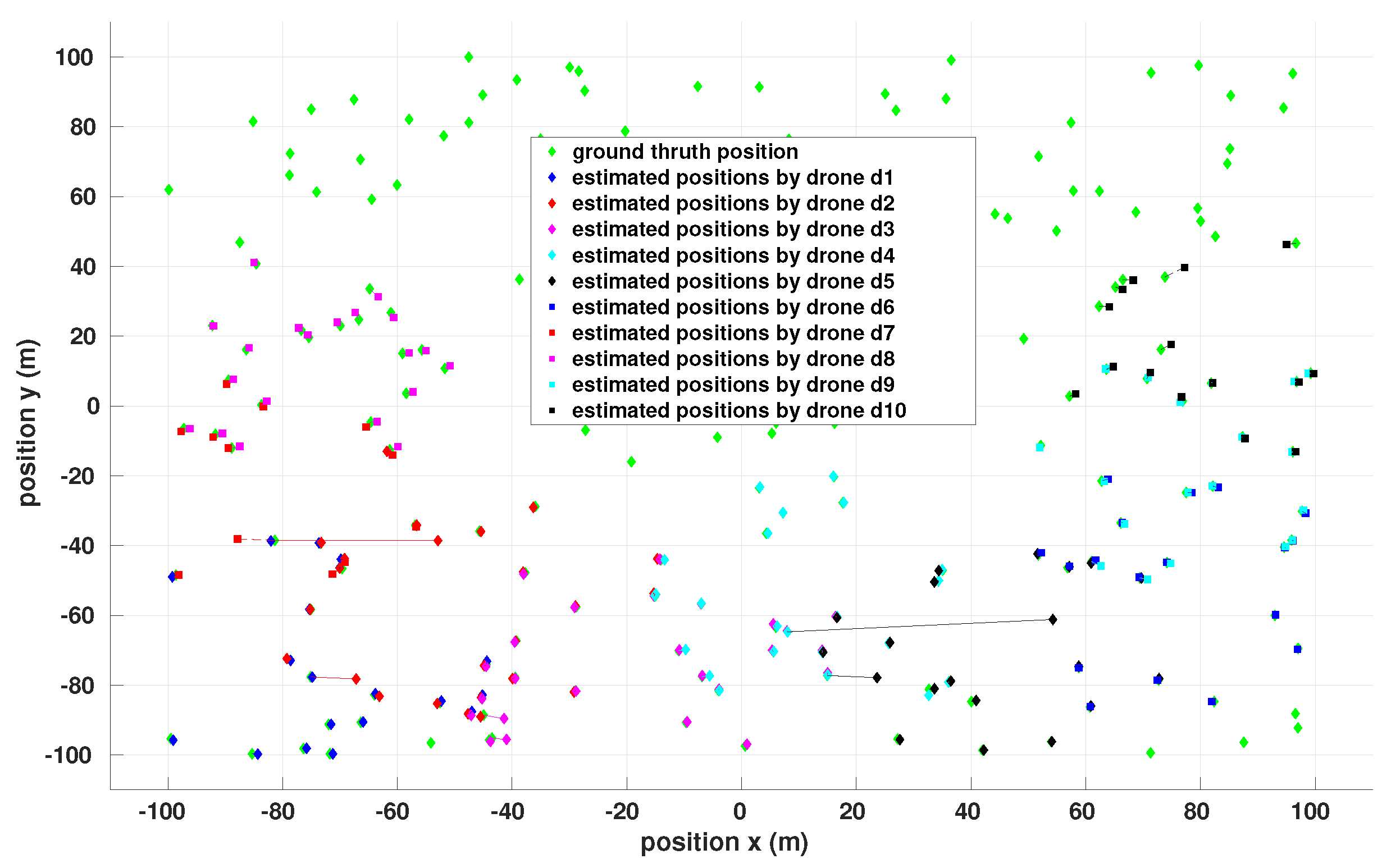
Figure 8), we consider 10 drones starting from different locations on the map. They are each equipped with an inertial measurement unit allowing us to obtain an odometry subject to significant errors, and an ultra-wideband sensor that can serve either as a track or as an anchor. The map is made up of 200 anchors of unknown positions scattered randomly across the map. Each drone executes a local trajectory and will therefore have the possibility of being within the range of certain anchors. The goal is to solve the twofold problem of locating as many anchors as possible, then to use the anchors located, to improve the odometric localization of the drones which is only given by inertial measurements.
Figure 9 shows the results of the estimated positions of the anchors detected by each drone, superimposed on the real positions (ground truth) on the initial map. One can observe a very small number of outliers compared to the number of well-located anchors. Some anchors have been located by different drones with small differences in their estimates. Interesting future work will be to merge and filter these different estimates to further improve the localization accuracy.
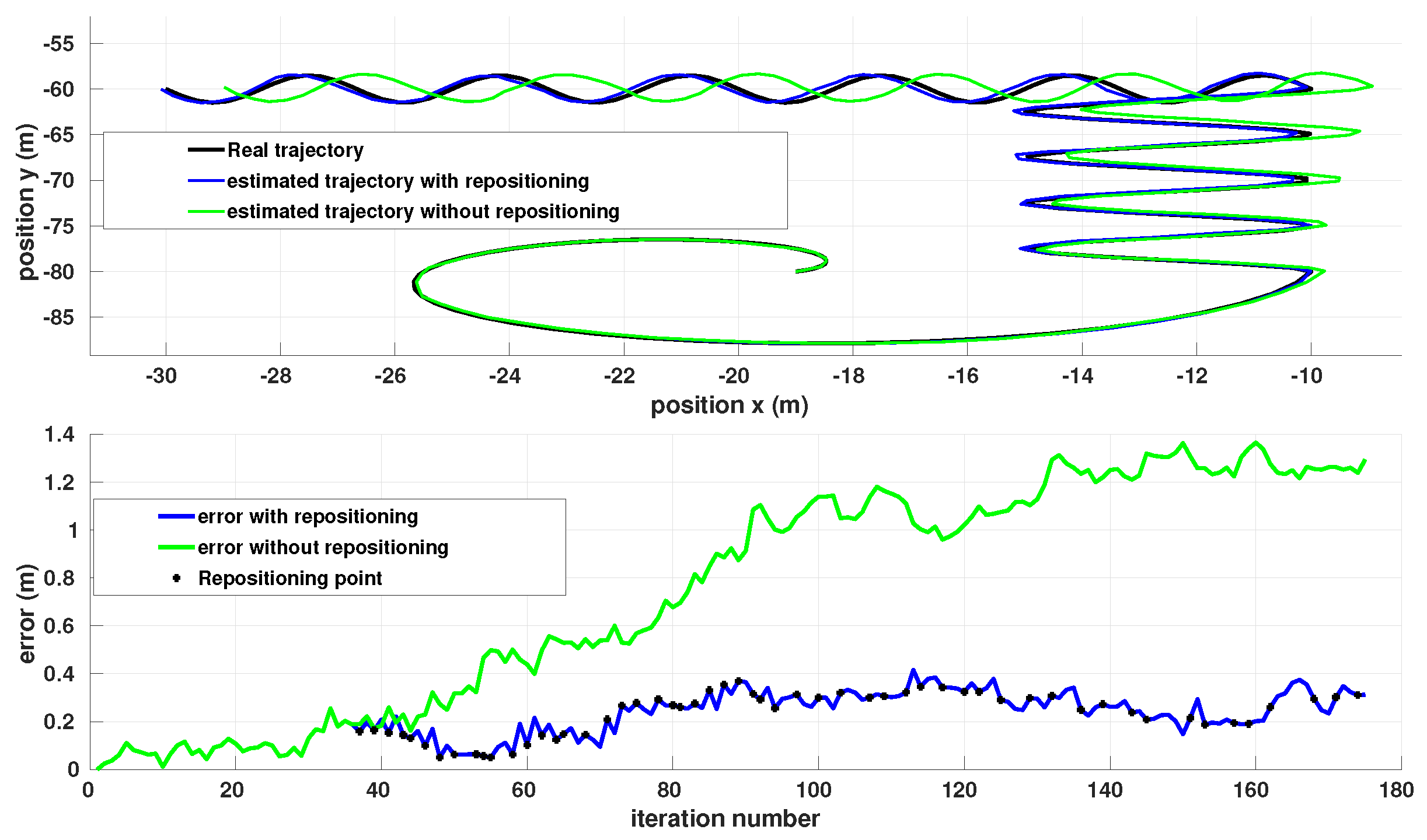
Figure 10 shows the results of an example drone localization scenario based on inertial measurements and enhanced by integrating distance measurements to anchors when they are located. The localization of each drone is first estimated by integrating the measurements of the inertial unit, which inevitably induces a strong drift depending on the distance traveled. The difficulty is therefore to take measurements at the start of the flight and to quickly locate a set of anchors before the drift and the localization error become too great to make multilateration unusable. When a sufficient number of anchors are located, the resolution of the multilateration localization optimization problem is re-initialized, which results in a significant improvement in the drone localization. The curves also indicate the localization errors in each case, with and without the use of the localized anchors to improve the drone localization. Points marked ’+’ on the blue curve indicate when anchor positions are made available and are therefore used to correct drift errors in inertial measurements, improving the localization accuracy. Note that the drone has no prior information on the location of the anchors. The positions of the detected anchors are first calculated with reference to the drone’s low-drift odometry; they are then exploited to correct the position of the drone, which explains the constant self-localization error. This process continues iteratively, which makes it possible to contain localization errors within a very limited interval.
5. Conclusions
This paper presents a unified formulation of the multilateration localization problem involving fixed sensors (anchors) and mobile agents (drones) based on ultra-wideband-range measurements. Different gradient descent methods have been studied, using a constant rate, a variable rate, and a new formulation introducing a damping parameter in the descent step. We have proposed a detailed study of the influence of various parameters such as the number of neighboring nodes for multilateration, the initialization of the algorithm, and the choice of the cost function, in addition to considering the positioning errors of the nodes and the sensor measurement noise. This leads, depending on the localization scenario, to parameter settings being chosen which allow for the best results according to the rate of convergence of the system, the localization error, and the computation time. In particular, the fixed-step gradient parameter can be set based on the number of neighboring nodes and produced good convergence and accuracy results in most scenarios. A thorough discussion is given based on extensive simulation results. The results have clearly shown good efficiency in locating anchors without prior knowledge of their positioning and, subsequently, the use of multilateration to perform drone tracking, thus improving its position given by the inertial unit. Trends of interest for future work include merging distributed estimates from multiple drones to further improve localization using global optimization, as well as carrying out experimental tests in real environments.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}