



CIPSO-Based Decision Support Method for Collision Avoidance of Super-Large Vessel in Port Waters

Abstract
:1. Introduction
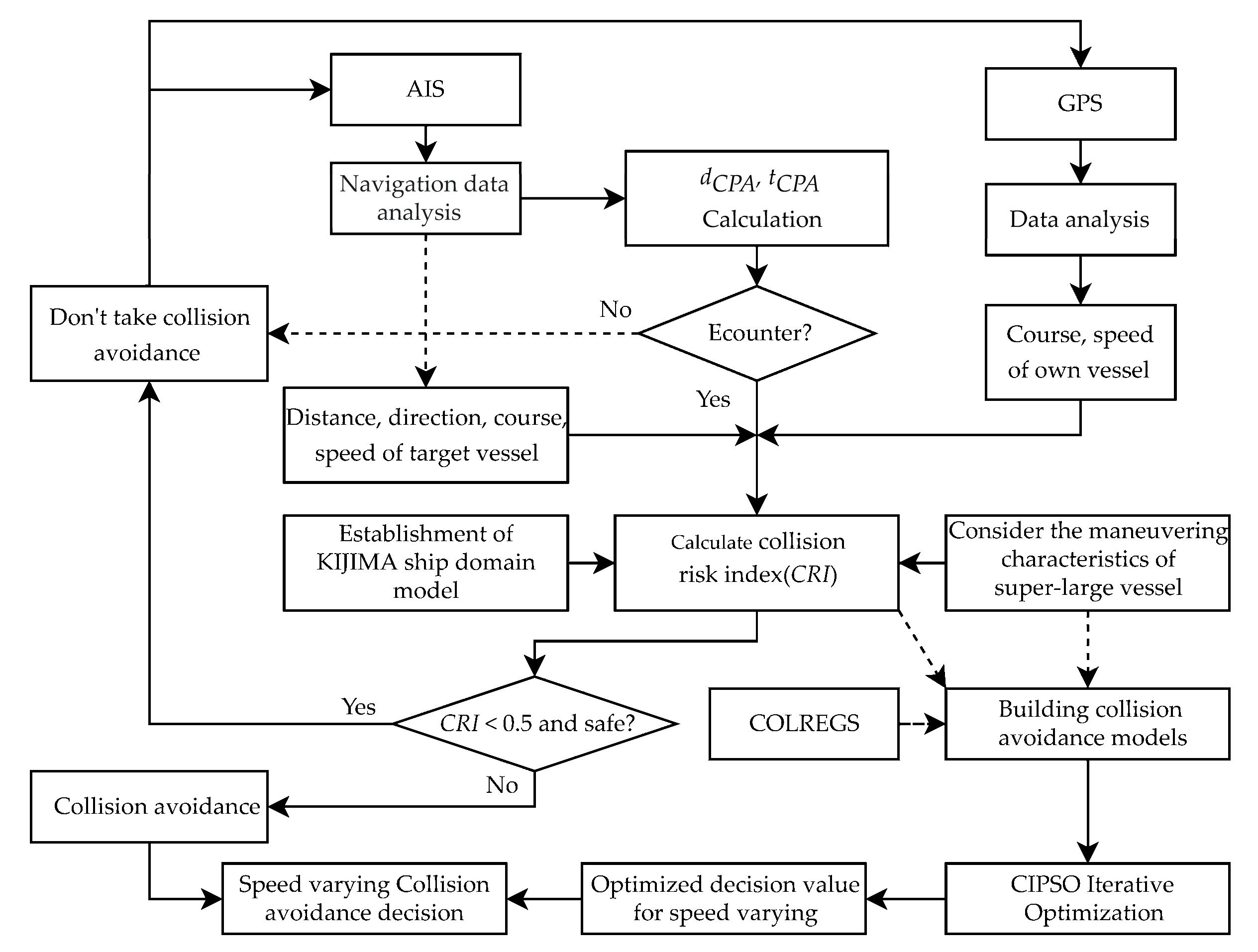
- A method is proposed for effective collision avoidance in port waters, considering the maneuvering characteristics and compliance with COLREGS regulations for super-large vessels. The method’s suitability and effectiveness are demonstrated in multi-vessel collision avoidance scenarios within ports.
- A vessel CRI assessment model is developed using the comprehensive judgment theory of fuzzy mathematics. This enables a comprehensive evaluation of multiple factors, including navigational information, deceleration strokes, and stroke time, enhancing risk assessment accuracy for super-large vessels.
- This work introduces the KIJIMA ship domain model to objectively determine safe encounter distances. This model overcomes the limitations of traditional methods and provides a reliable evaluation of risk severity.
- PSO is enhanced with a curve increment strategy. This strategy adjusts particle weights dynamically, achieving a balanced exploration of global and local search spaces. The proposed CIPSO algorithm demonstrates faster convergence, improved computational accuracy, and enhanced efficiency, resolving the issue of local optima.
2. Problem Description
2.1. Maneuvering Characteristics of Super-Large Vessel in Port Waters
- The inertia of the super-large vessel is large and the stopping performance is relatively poor due to its large scale, displacement, and mass;
- The line shape of the super-large vessel is fat and the block coefficient (Cb) is large, although the rudder area coefficient ratio of the vessel is low (generally lower than 1/65), the vessel has good turning and the turning ability index (k) value is large. This means that the scale of water required for a super-large vessel to turn around by itself larger;
- The large inertia and small rudder area coefficient of the super-large vessel make the vessel’s sailing stability and turning lag generally poor, i.e., it has a large turning lag index (T) value;
- The quality and size of the super-large vessel make it more susceptible to external environmental factors, such as side winds and cross waves. These factors can cause the vessel to deviate from its intended course and require more time and resources to adjust.
2.2. Geometrical Model of Speed-Varying Collision Avoidance for Super-Large Vessels
3. Super-Large Vessel Collision Avoidance Model
3.1. CRI Objective Function Model
3.2. Speed-Varying Energy-Loss Function Model
3.3. Total Objective Function Model
4. Collision Avoidance Decision Support Based on CIPSO Algorithm
4.1. Basic Principles of PSO
4.2. CIPSO Algorithm
| Algorithm 1: Pseudo code of CIPSO algorithm. | |
| 1 | FOR each particle (i) |
| 2 | Set up parameters (wmax, c1, c2) |
| 3 | Initialize particle position (xij) randomly within the permissible range |
| 4 | Initialize particle velocity (vij) randomly within the permissible range |
| 5 | Initialize the particle’s best position (Pbest) |
| 6 | IF the particle’s fitness value is better than the global best fitness value (gbest) |
| 7 | Update global best position (gbest) |
| 8 | END |
| 9 | END |
| 10 | Iteration t = 1 |
| 11 | DO |
| 12 | FOR each particle (i) |
| 13 | Calculate inertia weight (w) according to Equations (39) and (40) |
| 14 | Calculate second-order oscillation factor (,) according to Equations (42) and (43) |
| 15 | Update particle velocity and particle position according to Equation (41) |
| 16 | Calculate fitness value |
| 17 | IF the particle’s fitness value is better than its best fitness value (Pbest) |
| 18 | Update the particle’s best position (Pbest) |
| 19 | END |
| 20 | IF the particle’s fitness value is better than the global best fitness value (gbest) |
| 21 | Update global best position (gbest) |
| 22 | END |
| 23 | t = t + 1 |
| 24 | WHILE maximum iteration or minimum error criteria are not attained |
5. Simulation Analysis
5.1. Method Validation
5.2. Method Application
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tadros, M.; Ventura, M.; Soares, C.G. Review of Current Regulations, Available Technologies, and Future Trends in the Green Shipping Industry. Ocean Eng. 2023, 280, 114670. [Google Scholar]
- Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Navigation Safety on Shipping Routes during Construction. Appl. Sci. 2023, 13, 8593. [Google Scholar]
- Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. [Google Scholar]
- Sohail, A. Genetic Algorithms in the Fields of Artificial Intelligence and Data Sciences. Ann. Data Sci. 2023, 10, 1007–1018. [Google Scholar] [CrossRef]
- Jwo, D.-J.; Biswal, A.; Mir, I.A. Artificial Neural Networks for Navigation Systems: A Review of Recent Research. Appl. Sci. 2023, 13, 4475. [Google Scholar]
- Zhang, Y.; Zhang, D.; Jiang, H. A Review of Artificial Intelligence-Based Optimization Applications in Traditional Active Maritime Collision Avoidance. Sustainability 2023, 15, 13384. [Google Scholar]
- Nayak, J.; Swapnarekha, H.; Naik, B.; Dhiman, G.; Vimal, S. 25 Years of Particle Swarm Optimization: Flourishing Voyage of Two Decades. Arch. Comput. Methods Eng. 2022, 30, 1663–1725. [Google Scholar]
- Tsou, M.C.; Kao, S.L.; Su, C.M. Decision Support from Genetic Algorithms for Ship Collision Avoidance Route Planning and Alerts. J. Navig. 2010, 63, 167–182. [Google Scholar] [CrossRef]
- Tsou, M.C. Multi-Target Collision Avoidance Route Planning under an ECDIS Framework. Ocean Eng. 2016, 121, 268–278. [Google Scholar] [CrossRef]
- Fiskin, R.; Atik, O.; Kisi, H.; Nasibov, E.; Johansen, T.A. Fuzzy Domain and Meta-Heuristic Algorithm-Based Collision Avoidance Control for Ships: Experimental Validation in Virtual and Real Environment. Ocean Eng. 2021, 220, 108502. [Google Scholar]
- Ni, S.; Liu, Z.; Cai, Y. Ship Manoeuvrability-Based Simulation for Ship Navigation in Collision Situations. J. Mar. Sci. Eng. 2019, 7, 90. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary Path Planning for Autonomous Underwater Vehicles in a Variable Ocean. IEEE J. Ocean Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Lazarowska, A. Ship’s Trajectory Planning for Collision Avoidance at Sea Based on Ant Colony Optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Lazarowska, A. Multi-Criteria ACO-Based Algorithm for the Ship’s Trajectory Planning. TransNav J. 2017, 11, 31–36. [Google Scholar] [CrossRef]
- Tsou, M.C.; Hsueh, C.K. The Study of Ship Collision Avoidance Route Planning by Ant Colony Algorithm. J. Mar. Sci. Technol. 2010, 18, 18–22. [Google Scholar] [CrossRef]
- Wang, S.; Huang, M.; Chen, C.; Sun, J.; Ma, F. A Path Planning Method for Ship Collision Avoidance Considering Spatial–Temporal Interaction Effects. Appl. Sci. 2022, 12, 5036. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef]
- Shen, H.Q.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic Collision Avoidance of Multiple Ships Based on Deep Q-Learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Salter, I. COLREGs-Compliant Path Planning for Autonomous Surface Vehicles: A Multiobjective Optimization Approach. IFAC-PapersOnLine 2017, 50, 13662–13667. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local Path Planning for Unmanned Surface Vehicle Collision Avoidance Based on Modified Quantum Particle Swarm Optimization. Complexity 2020, 2020, 3095426. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-Objective Path Planning for Unmanned Surface Vehicle with Currents Effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [PubMed]
- Zheng, Y.; Zhang, X.; Shang, Z.; Guo, S.; Du, Y. A Decision-Making Method for Ship Collision Avoidance Based on Improved Cultural Particle Swarm. J. Adv. Transp. 2021, 2021, 1–31. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiorkowski, J.J.; Piotrowska, A.E. Partical Swarm Optimization or Differential Evolution—A Comparison. Eng. Appl. Artif. Intell. 2023, 121, 106008. [Google Scholar]
- Xie, S.; Chu, X.; Zheng, M.; Liu, C.G. Ship Predictive Collision Avoidance Method Based on an Improved Beetle Antennae Search Algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar]
- Xu, Q.Y. Collision Avoidance Strategy Optimization Based on Danger Immune Algorithm. Comput. Ind. Eng. 2014, 76, 268–279. [Google Scholar] [CrossRef]
- Wei, Z.K.; Zhao, K.; Wei, M. Decision-Making in Ship Collision Avoidance Based on Cat-Warm Biological Algorithm. In Proceedings of the 2015 International Conference on Computational Science and Engineering, Porto, Portugal, 21–23 October 2015; Atlantis: Amsterdam, The Netherlands, 2015; pp. 114–122. [Google Scholar]
- Zhao, Y.L. Collision Avoidance and Watch Keeping; Dalian Maritime University Press: Dalian, China, 2010. [Google Scholar]
- Liu, H.D.; Liu, Q.; Sun, R. Deterministic Vessel Automatic Collision Avoidance Strategy Evaluation Modeling. Int. Autom. Soft Co. 2019, 25, 789–804. [Google Scholar] [CrossRef]
- Zhou, W.; Zheng, J.; Xiao, Y.J. An Online Identification Approach for Ship Domain Model Based on AIS Data. PLoS ONE 2022, 17, e0265266. [Google Scholar]
- Li, Y.S.; Guo, Z.Q.; Yang, J.; Fang, H.; Hu, Y.W. Prediction of Ship Collision Risk Based on CART. IET Intell. Transp. Syst. 2018, 12, 1345–1350. [Google Scholar] [CrossRef]
- Chen, S.; Ahmad, R.; Lee, B.G.; Kim, D. Composition Ship Collision Risk Based on Fuzzy Theory. J. Cent. South Univ. 2014, 21, 4296–4302. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. Review of Ship Safety Domains: Models and Applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E.M. A Statistical Study of Ship Domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A Computer Simulation of Marine Traffic Using Domains and Arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Coldwell, T.G. Marine Traffic Behaviour in Restricted Waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Kijima, K.; Furukawa, Y. Automatic Collision Avoidance System Using the Concept of Blocking Area. IFAC Proc. Vols. 2003, 36, 223–228. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Uriasz, J. The Ship Domain—A Criterion of Navigational Safety Assessment in an Open Sea Area. J. Navig. 2009, 62, 93–108. [Google Scholar] [CrossRef]
- Wang, N.; Meng, X.; Xu, Q.; Wang, Z. A Unified Analytical Framework for Ship Domains. J. Navig. 2009, 62, 643–655. [Google Scholar]
- Venkateswaran, C.; Ramachandran, M.; Ramu, K.; Prasanth, V.; Mathivanan, G. Application of Simulated Annealing in Various Field. Mater. Its Charact. 2022, 1, 100299. [Google Scholar] [CrossRef]
- Alhijawi, B.; Awajan, A. Genetic Algorithms: Theory, Genetic Operators, Solutions, and Applications. In Evolutionary Intelligence; Springer: Berlin/Heidelberg, Germany, 2023; pp. 1–12. [Google Scholar]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle Swarm Optimization: A Comprehensive Survey. IEEE Access 2022, 10, 10031–10061. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Authors | Collision Avoidance Operation | Applied Waters | Motion Characteristics | COLR-EGS |
|---|---|---|---|---|---|
| GA | Tsou et al. [8,9] | steering | open water | med | yes |
| ACO | Lazarowska [13,14] | steering | open water | high | yes |
| NNs | Shen et al. [18] | steering | open water | high | yes |
| PSO | Zheng et al. [22] | steering | open water | med | yes |
| BAS | Xie et al. [24] | steering | open water | med | yes |
| DIA | Xu [25] | steering | open water | med | yes |
| CSO | Wei et al. [26] | steering | open water | low | yes |
| Target Vessel | TG1 | TG2 | TG3 |
|---|---|---|---|
| Vessel type | Fish boat | LNG | Bulk carrier |
| Course (°) | 90.0 | 253.0 | 93.0 |
| Direction (°) | 313.5 | 008.4 | 307.8 |
| Speed (knot) | 7 | 9 | 9 |
| Distance (n mile) | 3.561 | 4.522 | 5.483 |
| dCPA (n mile) | 0.242 | 0.075 | 0.080 |
| tCPA (min) | 12.13 | 19.32 | 16.93 |
| Displacement (t) | 286.0 | 89,634.0 | 23,565.0 |
| Length (m) | 24.4 | 274.3 | 182.9 |
| Breadth (m) | 7.2 | 43.3 | 22.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, B.; Zhuo, Y. CIPSO-Based Decision Support Method for Collision Avoidance of Super-Large Vessel in Port Waters. Appl. Sci. 2023, 13, 11100. https://doi.org/10.3390/app131911100
Xiang B, Zhuo Y. CIPSO-Based Decision Support Method for Collision Avoidance of Super-Large Vessel in Port Waters. Applied Sciences. 2023; 13(19):11100. https://doi.org/10.3390/app131911100
Chicago/Turabian StyleXiang, Bo, and Yongqiang Zhuo. 2023. "CIPSO-Based Decision Support Method for Collision Avoidance of Super-Large Vessel in Port Waters" Applied Sciences 13, no. 19: 11100. https://doi.org/10.3390/app131911100
APA StyleXiang, B., & Zhuo, Y. (2023). CIPSO-Based Decision Support Method for Collision Avoidance of Super-Large Vessel in Port Waters. Applied Sciences, 13(19), 11100. https://doi.org/10.3390/app131911100