
Simulation and Validation of a Steering Control Strategy for Tracked Robots

 ,
,
Abstract
:1. Introduction
2. Analysis of Robot Structure and Steering Radius
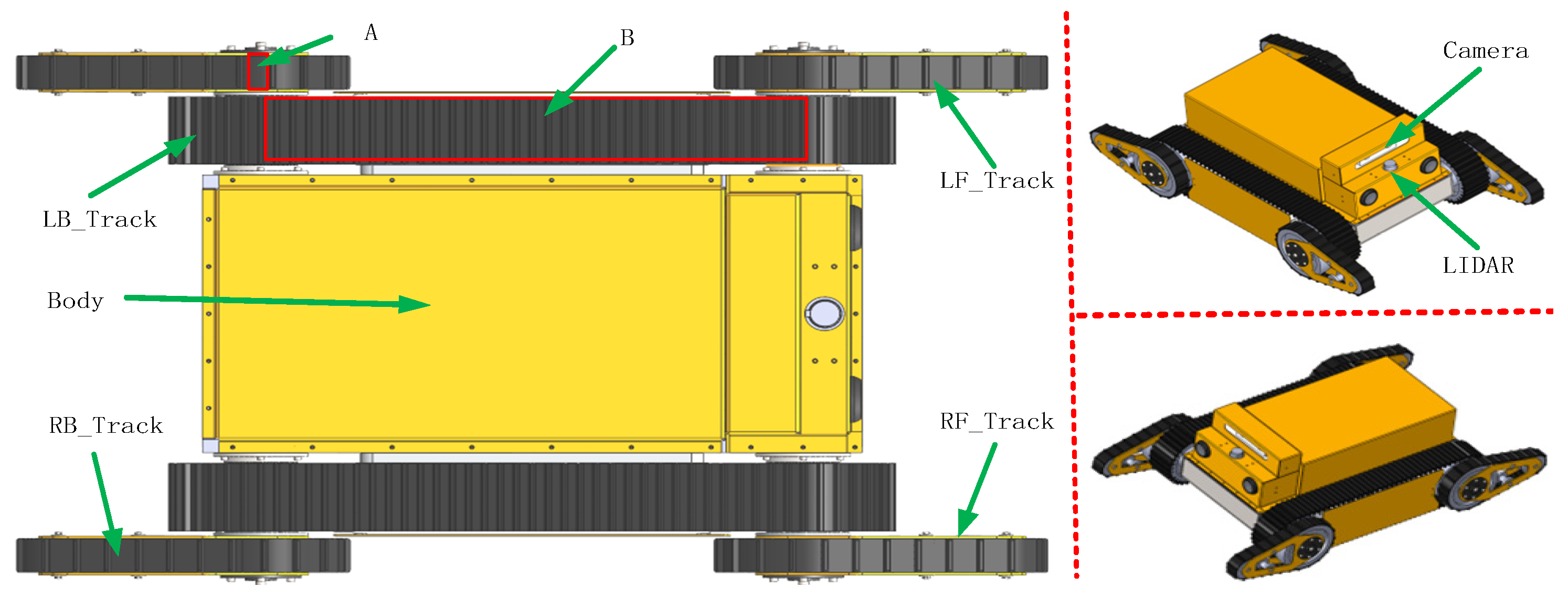
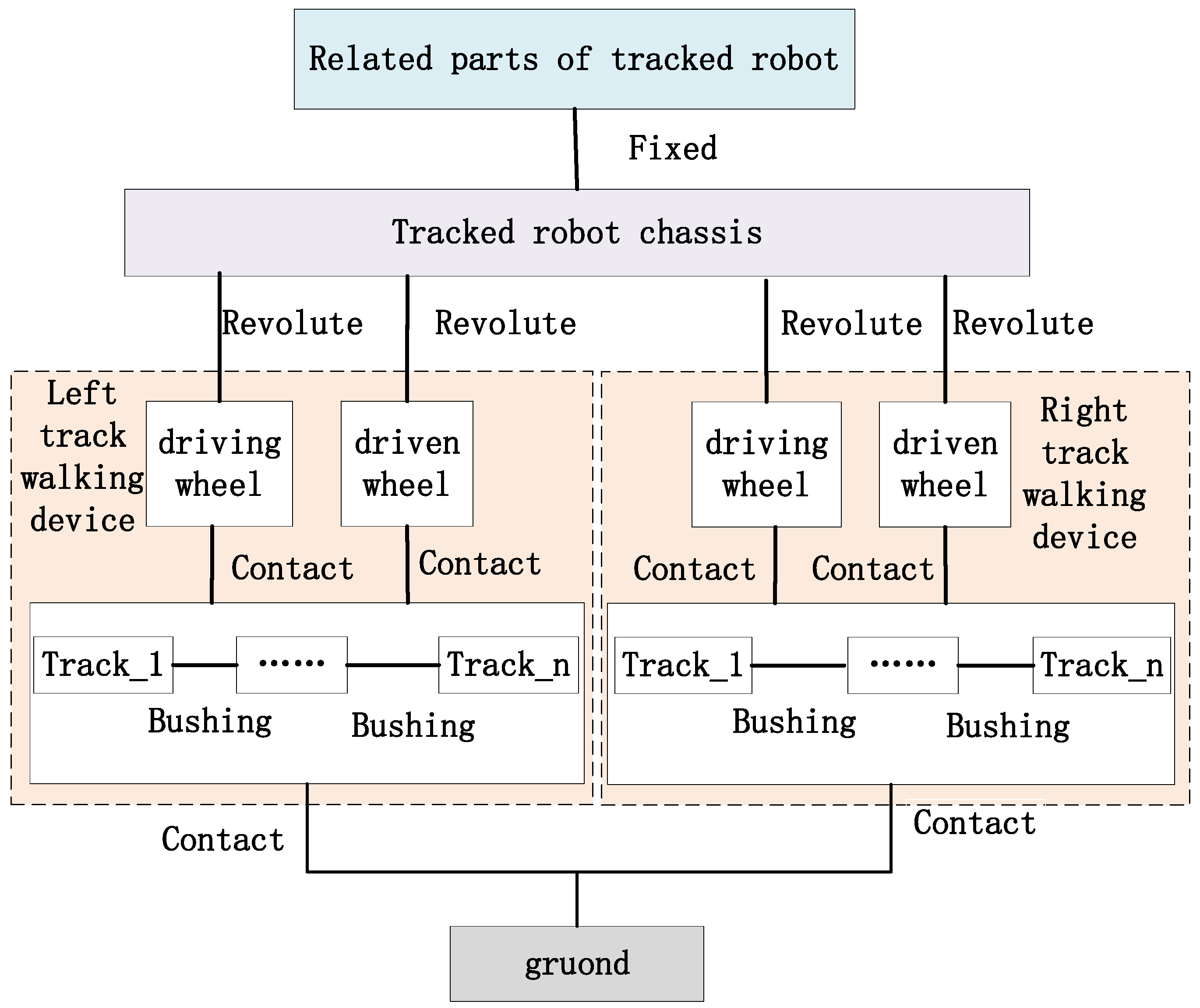
2.1. Analysis of Robot Structure
2.2. Analysis of the Skid and Slip Rates
2.3. Relation between Driving Force and Slip Rate
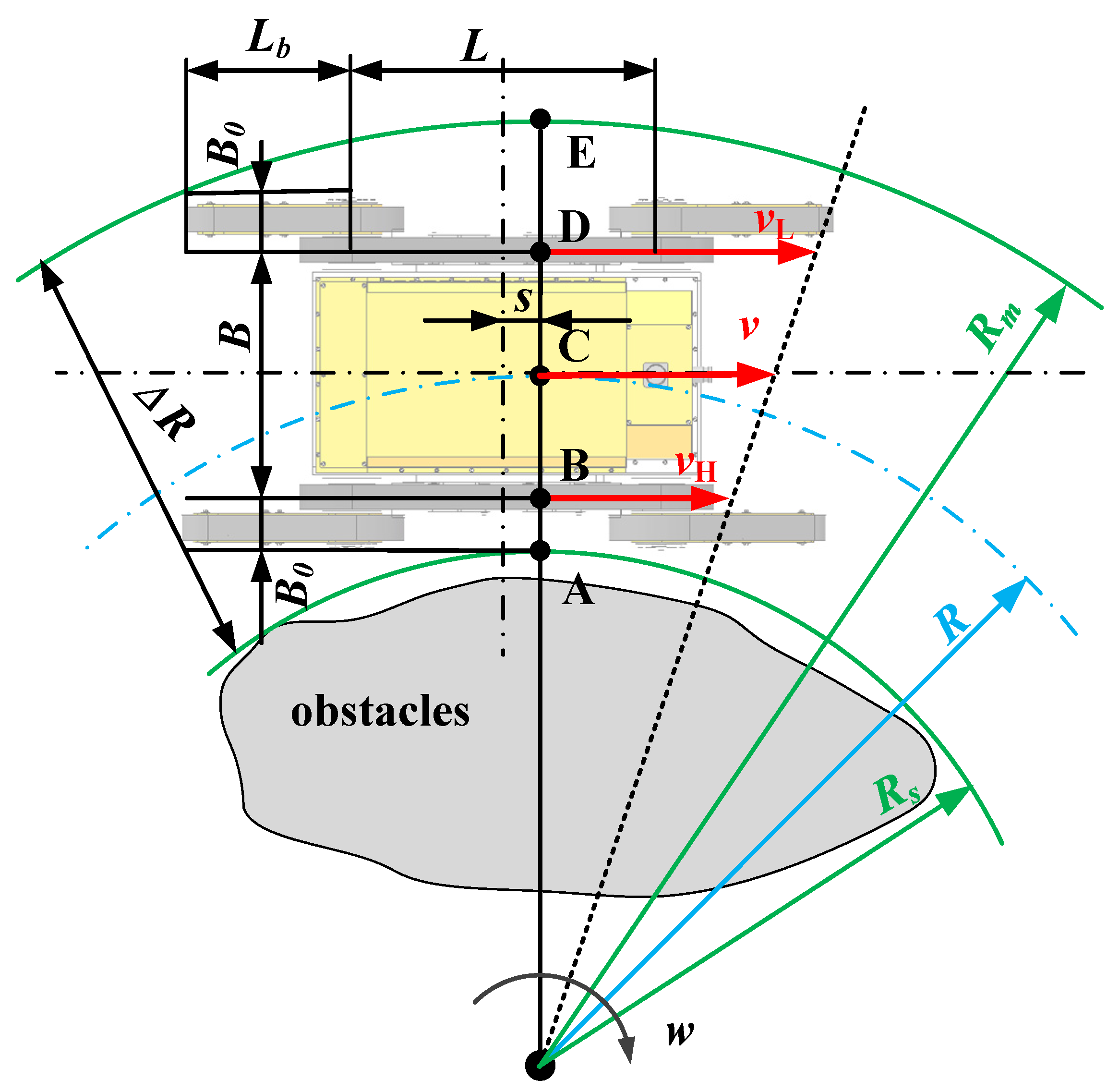
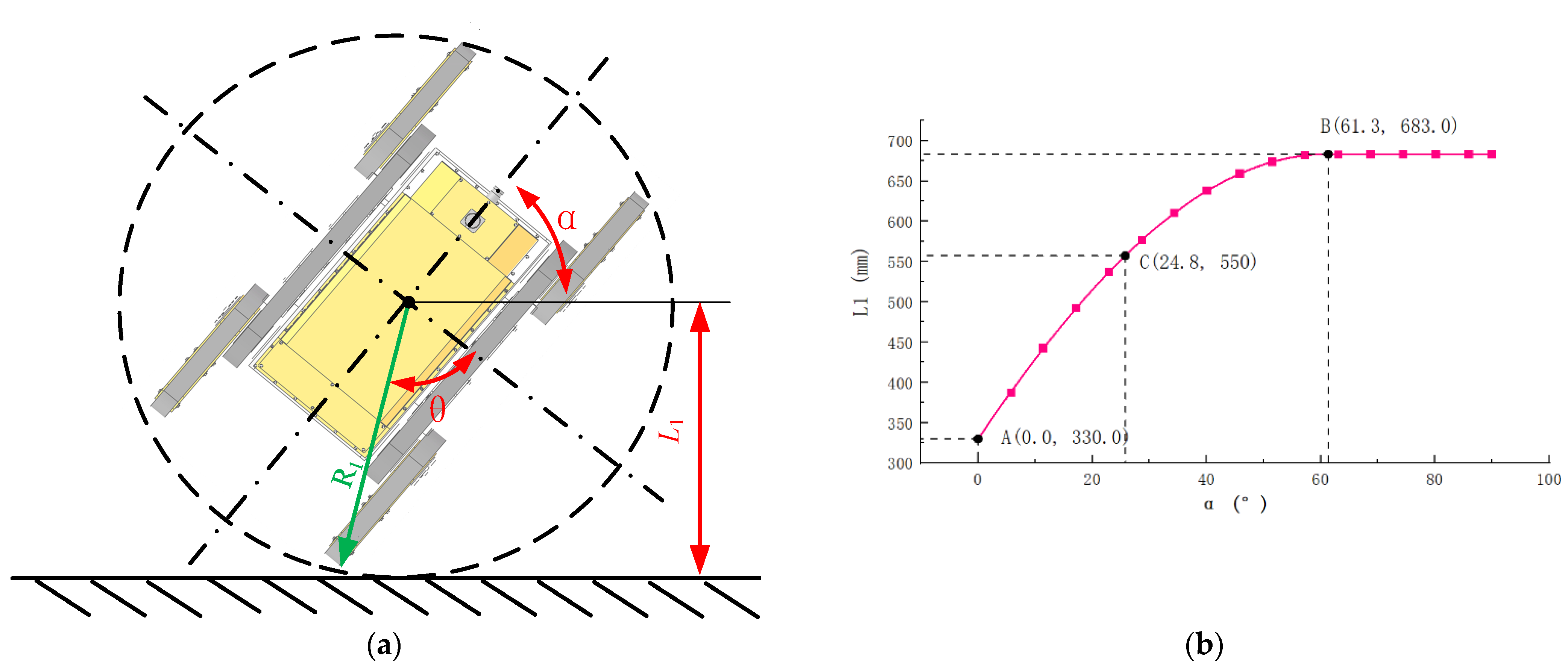
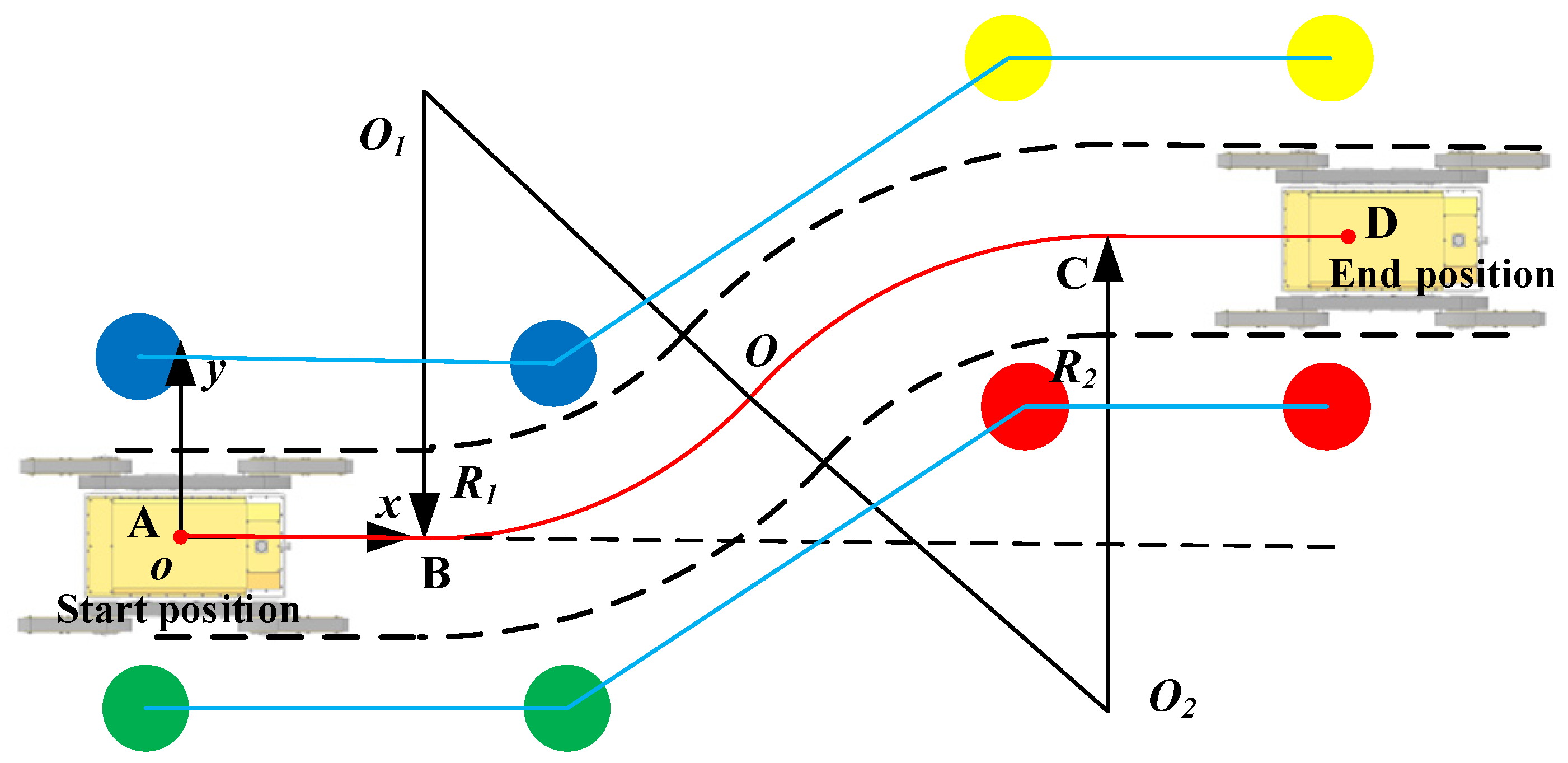
2.4. Analysis of Tracked Robot Steering Radius
3. Relationship between Robot Steering Radius and Obstacle Position
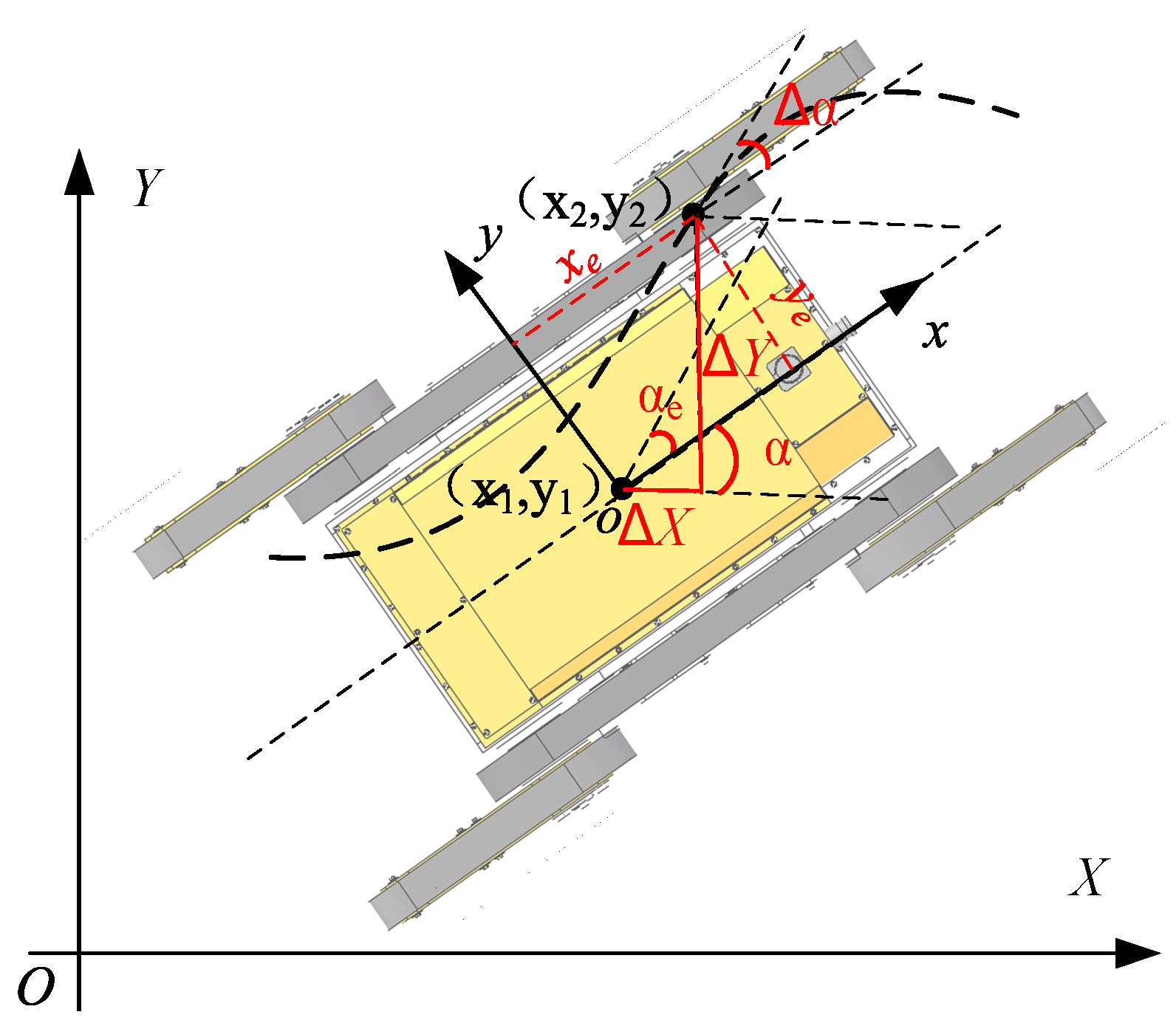
4. Deviation Correction Control Method of Tracked Robot
4.1. Control Mechanism of Deviation Correction
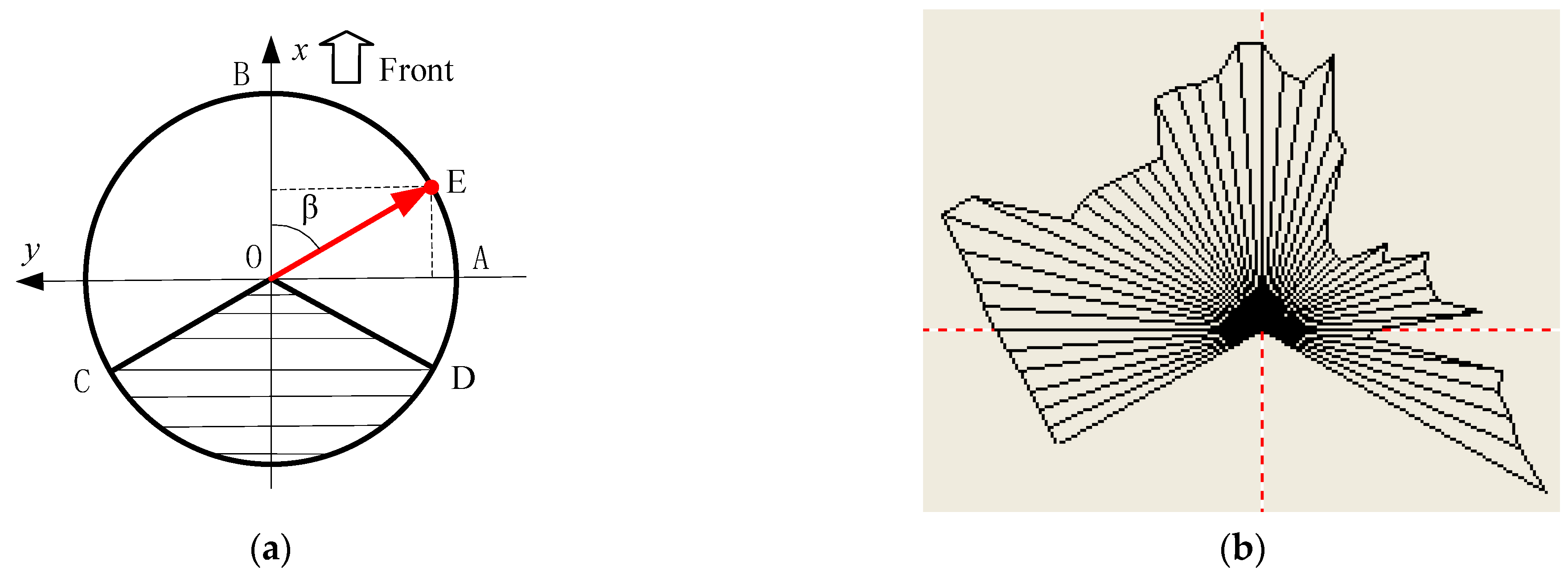
4.2. Principle Analysis of LiDAR Ranging
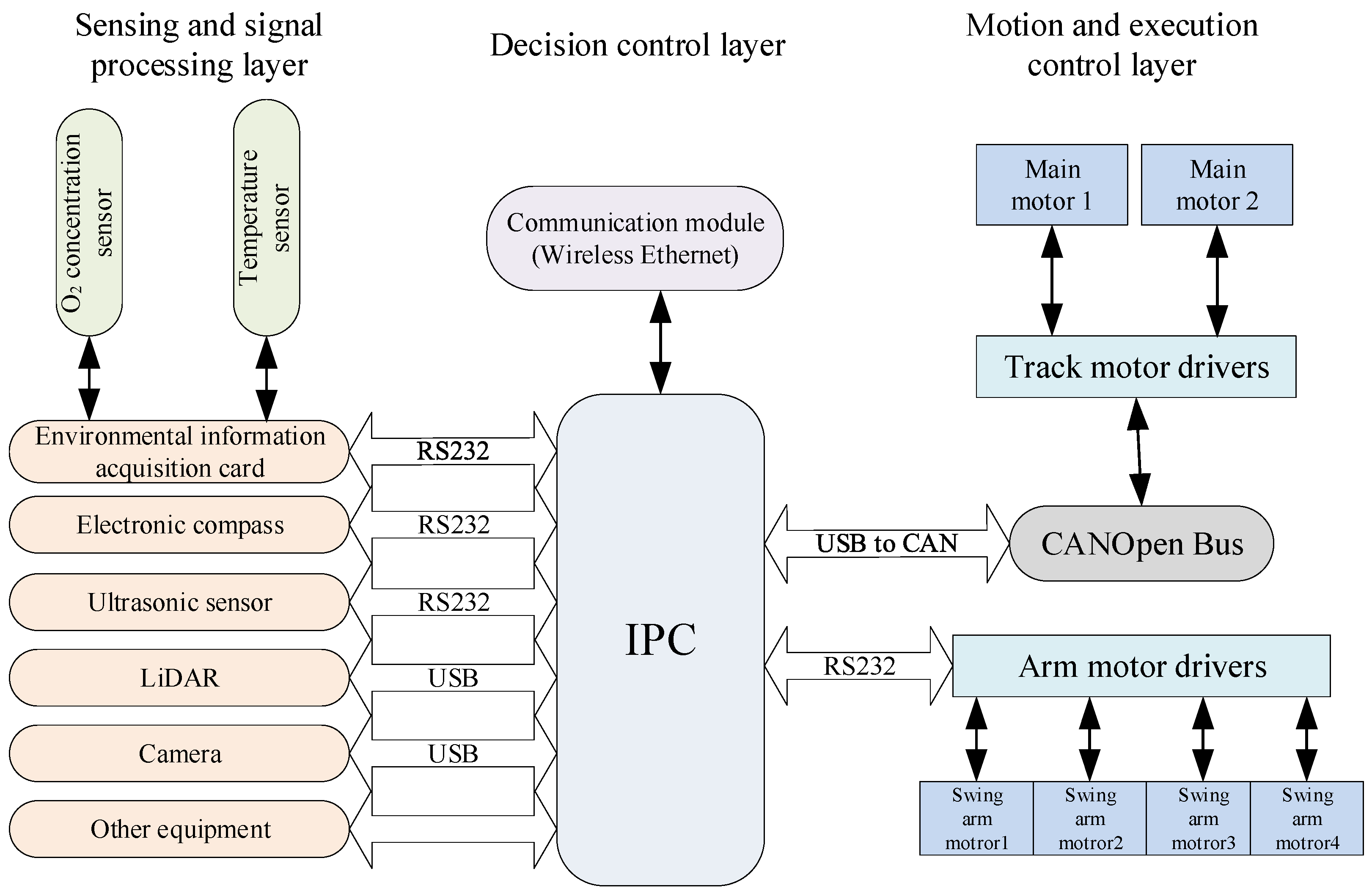
4.3. Robot Measurement and Control System
5. Simulation Analysis of Obstacle Avoidance Steering Control
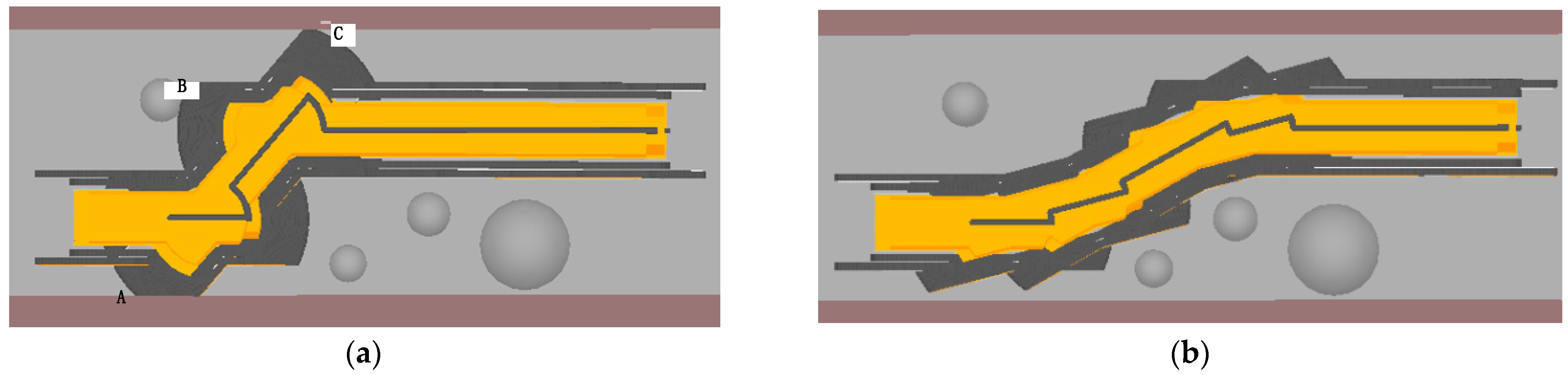
5.1. Obstacle Avoidance Steering Control Strategy for Tracked Robot
5.2. Center Steering Simulation Analysis
5.3. Differential Steering Simulation Analysis
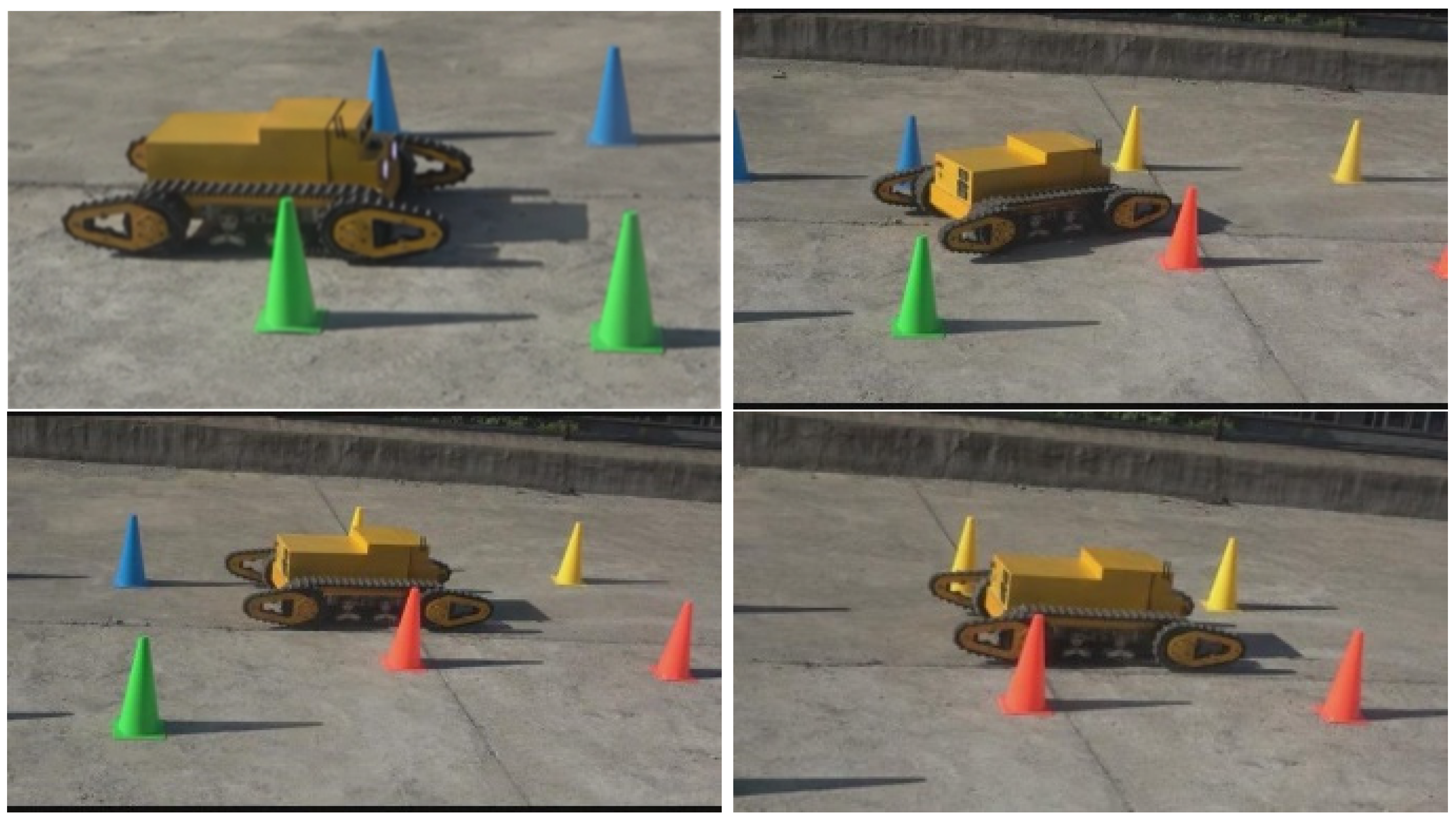
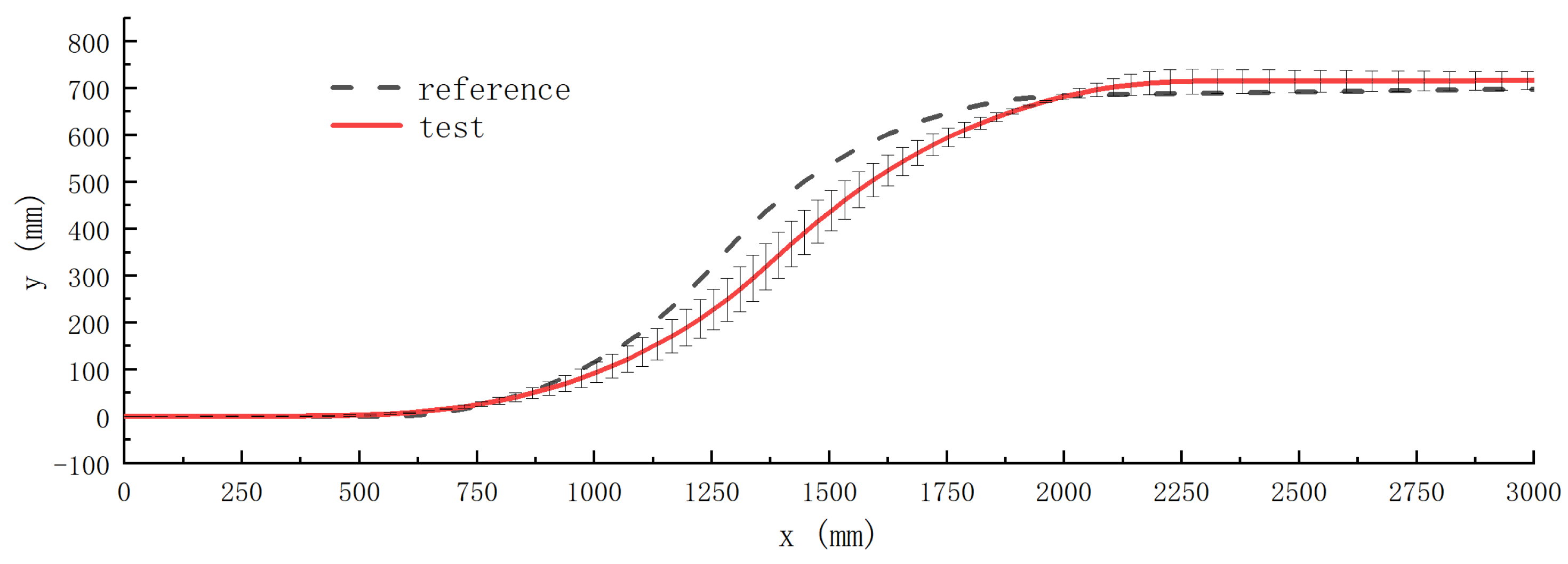
5.4. Test and Analysis of Robot Obstacle Avoidance Steering
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mitch, L. Robots Tackle DARPA Underground Challenge. Engineering 2022, 13, 2–4. [Google Scholar]
- Wang, C.; Wang, D.; Pan, W.; Zhang, H. Output-Based Tracking Control for a Class of Car-Like Mobile Robot Subject to Slipping and Skidding Using Event-Triggered Mechanism. Electronics 2021, 10, 2886. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Zeng, L.; Wen, Z. The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester. Agriculture 2022, 12, 890. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Z.; Liu, S.; Tao, Y.; Liu, Y. Design and Research of an Articulated Tracked Firefighting Robot. Sensors 2022, 22, 5086. [Google Scholar] [CrossRef] [PubMed]
- Shafaei, S.M.; Mousazadeh, H. On the power characteristics of an unmanned tracked vehicle for autonomous transportation of agricultural payloads. J. Terramech. 2023, 109, 21–36. [Google Scholar]
- Kayacan, E.; Young, S.N.; Peschel, J.M.; Chowdhary, G. High-precision control of tracked field robots in the presence of unknown traction coefficients. J. Field Robot. 2018, 35, 1050–1062. [Google Scholar] [CrossRef]
- Chen, T.; Xu, L.; Ahn, H.S.; Lu, E.; Liu, Y.; Xu, R. Evaluation of headland turning types of adjacent parallel paths for combine harvesters. Biosyst. Eng. 2023, 233, 93–113. [Google Scholar] [CrossRef]
- Jia, W.; Liu, X.; Zhang, C.; Qiu, M.; Zhang, Y.; Quan, Q.; Sun, H. Research on Steering Stability of High-Speed Tracked Vehicles. Math. Probl. Eng. 2022, 2022, 4850104. [Google Scholar] [CrossRef]
- Xiong, H.; Chen, Y.; Li, Y.; Zhu, H.; Yu, C.; Zhang, J. Dynamic model-based back-stepping control design for-trajectory tracking of seabed tracked vehicles. J. Mech. Sci. Technol. 2022, 36, 4221–4232. [Google Scholar] [CrossRef]
- Hu, K.; Cheng, K. Dynamic modelling and stability analysis of the articulated tracked vehicle considering transient track-terrain interaction. J. Mech. Sci. Technol. 2021, 35, 1343–1356. [Google Scholar] [CrossRef]
- Sabiha, A.D.; Kamel, M.A.; Said, E.; Hussein, W.M. ROS-based trajectory tracking control for autonomous tracked vehicle using optimized backstepping and sliding mode control. Robot. Auton. Syst. 2022, 152, 104058. [Google Scholar] [CrossRef]
- Fang, Y.; Wang, S.; Cui, D.; Bi, Q.; Yan, C. Multi-body dynamics model of crawler wall-climbing robot. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2022, 236, 535–553. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, Z.; Su, Z.; Tian, L.; Xiong, Y.; Wu, X.; Tang, Z. A New Model to Predict the Slippage Coefficient of Tracked Vehicles During Steering. IEEE Access 2022, 10, 72006–72014. [Google Scholar] [CrossRef]
- Wu, J.; Wang, G.; Zhao, H.; Sun, K. Study on electromechanical performance of steering of the electric articulated tracked vehicles. J. Mech. Sci. Technol. 2019, 33, 3171–3185. [Google Scholar] [CrossRef]
- Yang, C.; Yang, G.; Liu, Z.; Chen, H.; Zhao, Y. A method for deducing pressure–sinkage of tracked vehicle in rough terrain considering moisture and sinkage speed. J. Terramech. 2018, 79, 99–113. [Google Scholar] [CrossRef]
- Kuwahara, H.; Murakami, T. Position control considering slip motion of tracked vehicle using driving force distribution and lateral disturbance suppression. IEEE Access 2022, 10, 20571–20580. [Google Scholar] [CrossRef]
- Wang, C.; Ma, K.; Yang, L.; Ma, H.; Xue, X.; Tian, H. Simulation and experiment on obstacle-surmounting performance of four swing arms and six tracked robot under unilateral step environment. Trans. Chin. Soc. Agric. Eng. 2018, 34, 46–53. [Google Scholar]
- Wang, C.; Wang, S.; Ma, H.; Zhang, H.; Xue, X.; Tian, H.; Zhang, L. Research on the Obstacle-Avoidance Steering Control Strategy of Tracked Inspection Robots. Appl. Sci. 2022, 12, 10526. [Google Scholar] [CrossRef]
- Wong, J.; Senatore, C.; Jayakumar, P.; Iagnemma, K. Predicting mobility performance of a small, lightweight track system using the computer-aided method NTVPM. J. Terramech. 2015, 61, 23–32. [Google Scholar] [CrossRef]
- Strawa, N.; Ignatyev, D.I.; Zolotas, A.C.; Tsourdos, A. On-Line Learning and Updating Unmanned Tracked Vehicle Dynamics. Electronics 2021, 10, 187. [Google Scholar] [CrossRef]
- Prado, A.J.; Torres-Torriti, M.; Cheein, F.A. Distributed Tube-Based Nonlinear MPC for Motion Control of Skid-Steer Robots With Terra-Mechanical Constraints. IEEE Robot. Autom. Lett. 2021, 6, 8045–8052. [Google Scholar] [CrossRef]
- Wong, J.Y.H.; Chiang, C. A general theory for skid steering of tracked vehicles on firm ground. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Body weight (G) | 1200 N |
| Body width (B) | 790 mm |
| Body height (h) | 360 mm |
| Wheelbase (L) | 650 mm |
| Radius of driving wheel (Rw) | 102 mm |
| Motor torque (T) | 28.2 N.m |
| Inspection speed (v) | 2 km/h |
| The width of swing arm (B0) | 123 mm |
| The length of swing arm (Lb) | 312 mm |
| Track width (b) | 100 mm |
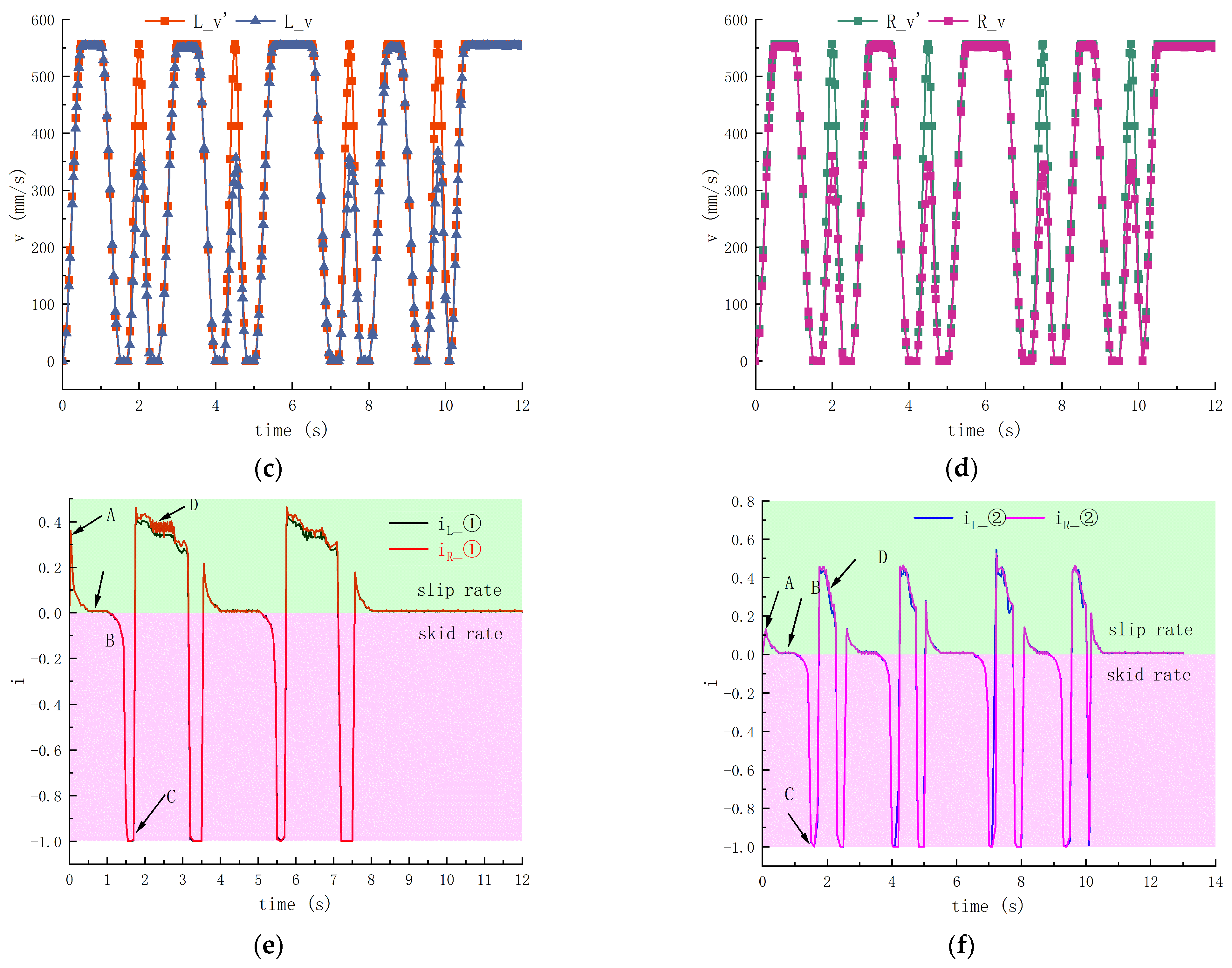
| Point | Strategy 1 | Strategy 2 |
|---|---|---|
| point A | 0.36 | 0.13 |
| point B | 0.01~0.1 | 0.01~0.1 |
| point C | −1 | −1 |
| point D | 0.28~0.46 | 0.25~0.5 |
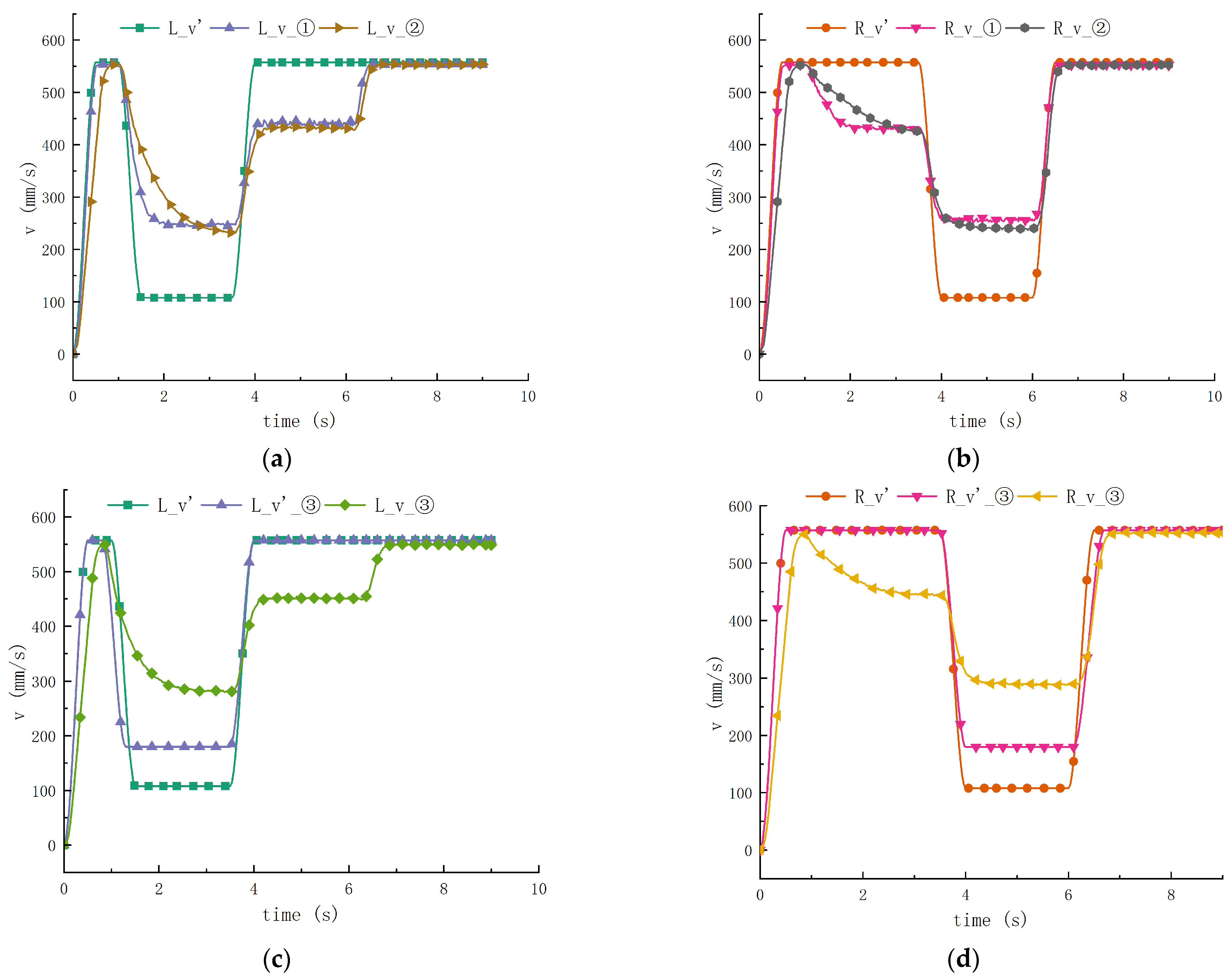
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 | |
|---|---|---|---|---|
| Road properties | rough road surface | smooth road surface | smooth road surface | |
| Control strategy | control strategy 1 | control strategy 1 | control strategy 2 | |
| Contact parameters | S_coefficient | 0.3 | 0.1 | 0.1 |
| D_coefficient | 0.1 | 0.05 | 0.05 | |
| Steering radius (mm) | Ra’1 | 585 | 585 | 771 |
| Ra1 | 930 | 967 | 1220 | |
| Ra’2 | 585 | 585 | 585 | |
| Ra2 | 978 | 959 | 1266 | |
| Point | iR_① | iL_① | iR_② | iL_② | iR_③ | iL_③ |
|---|---|---|---|---|---|---|
| point A | 0.59 | 0.59 | 0.66 | 0.66 | 0.8 | 0.8 |
| point B | 0.01~0.23 | −0.56 | 0.01~0.24 | −0.71~−0.53 | 0.01~0.2 | −0.54~−0.37 |
| point C | −0.56 | 0.01~0.23 | −0.60~−0.54 | 0.22 | −0.42~−0.38 | 0.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Zhang, H.; Ma, H.; Wang, S.; Xue, X.; Tian, H.; Liu, P. Simulation and Validation of a Steering Control Strategy for Tracked Robots. Appl. Sci. 2023, 13, 11054. https://doi.org/10.3390/app131911054
Wang C, Zhang H, Ma H, Wang S, Xue X, Tian H, Liu P. Simulation and Validation of a Steering Control Strategy for Tracked Robots. Applied Sciences. 2023; 13(19):11054. https://doi.org/10.3390/app131911054
Chicago/Turabian StyleWang, Chuanwei, Heng Zhang, Hongwei Ma, Saisai Wang, Xusheng Xue, Haibo Tian, and Peng Liu. 2023. "Simulation and Validation of a Steering Control Strategy for Tracked Robots" Applied Sciences 13, no. 19: 11054. https://doi.org/10.3390/app131911054
APA StyleWang, C., Zhang, H., Ma, H., Wang, S., Xue, X., Tian, H., & Liu, P. (2023). Simulation and Validation of a Steering Control Strategy for Tracked Robots. Applied Sciences, 13(19), 11054. https://doi.org/10.3390/app131911054