

Event-Sampled Adaptive Neural Course Keeping Control for USVs Using Intermittent Course Data



Abstract
:1. Introduction
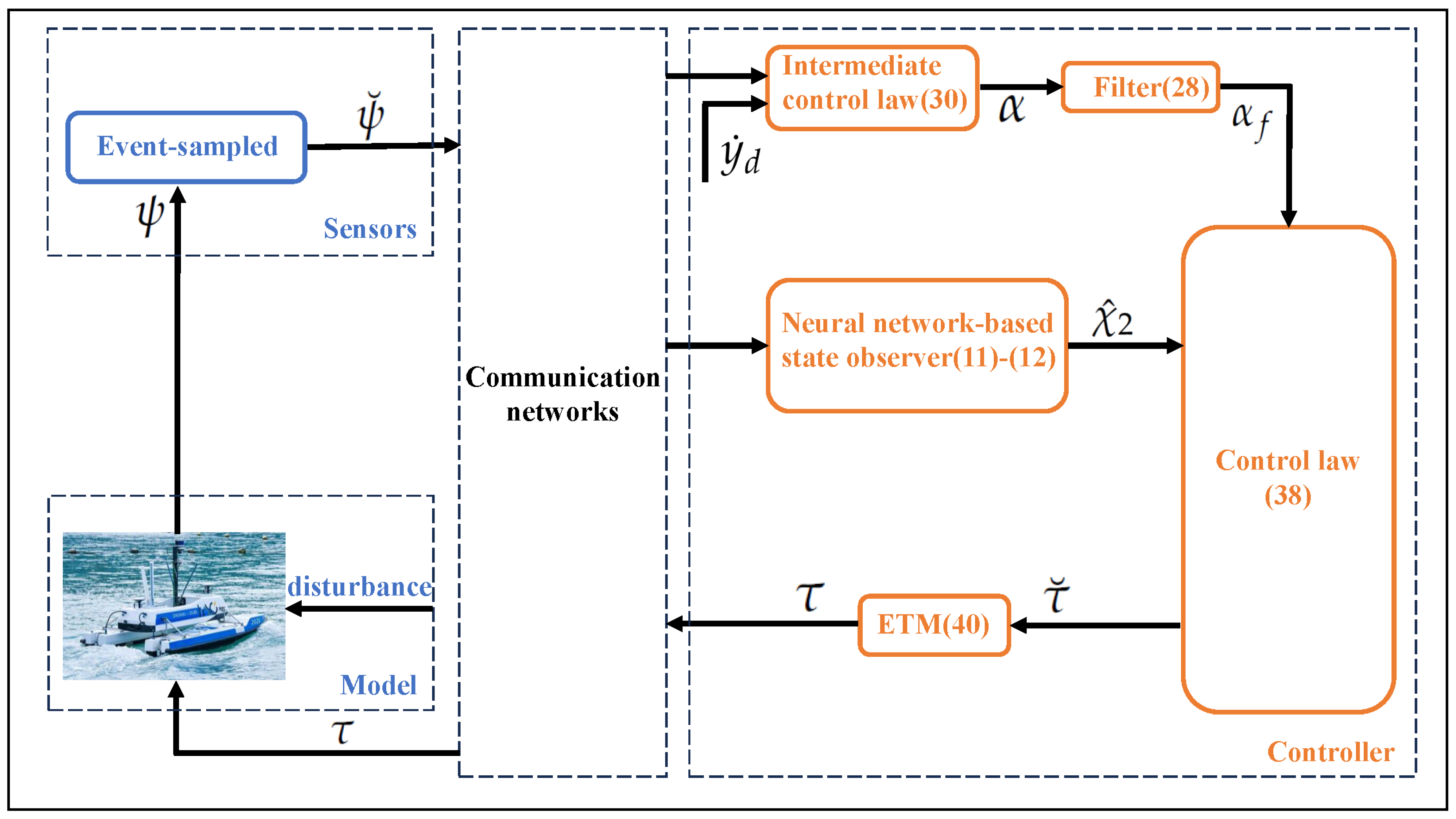
- A novel NN-based state observer is developed, and its benefits are doubled, i.e., the transmitted data are further reduced due to the yaw being exempted from transmission, and the state reconstruction of the discontinuous course data is realized.
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
2.2. Preliminaries
3. Observer Design
3.1. NN-Based State Observer Design
3.2. Stability Analysis of State Observer Design
4. Control Design
4.1. Control Law Design
4.2. Stability Analysis of Control Law
- 1.
- All signals in the CLCS are bounded;
- 2.
- This can avoid the Zeno behavior.
4.3. Simulations
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, Y.; Hu, M.; Yan, X. Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Li, Z.; Bi, H.; Wang, J.; Malekian, R.; Sotel, M. CCIBA*: An improved BA* based collaborative coverage path planning method for multiple unmanned surface mapping vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19578–19588. [Google Scholar] [CrossRef]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, X. A novel cooperative platform design for coupled USV–UAV systems. IEEE Trans. Ind. Inform. 2019, 15, 4913–4922. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.; Wang, J.; Han, Q. Advances in line-of-sight guidance for path following of autonomous marine vehicles: An overview. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 12–28. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- He, Z.; Fan, Y.; Wang, G.; Qiao, S. Finite time course keeping control for unmanned surface vehicles with command filter and rudder saturation. Ocean Eng. 2023, 280, 114403. [Google Scholar] [CrossRef]
- Zhang, G.; Han, J.; Zhang, W.; Yin, Y.; Zhang, L. Finite-time adaptive event-triggered control for USV with COLREGS-compliant collision avoidance mechanism. Ocean Eng. 2023, 285, 115357. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Trondheim, Norway, 2011. [Google Scholar]
- Er, M.J.; Ma, C.; Liu, T.; Gong, H. Intelligent motion control of unmanned surface vehicles: A critical review. Ocean Eng. 2023, 280, 114562. [Google Scholar] [CrossRef]
- Hu, J.; Ge, Y.; Zhou, X.; Zhou, X.; Liu, S.; Wu, J. Research on the course control of USV based on improved ADRC. Syst. Sci. Control Eng. 2021, 9, 44–51. [Google Scholar] [CrossRef]
- Lai, P.; Liu, Y.; Zhang, W.; Xu, H. Intelligent controller for unmanned surface vehicles by deep reinforcement learning. Phys. Fluids 2023, 35, 037111. [Google Scholar] [CrossRef]
- Islam, M.M.; Siffat, S.A.; Ahmad, I.; Liaquat, M. Robust integral backstepping and terminal synergetic control of course keeping for ships. Ocean Eng. 2021, 221, 108532. [Google Scholar] [CrossRef]
- González-Prieto, J.; Carlos, P.; Yogang, S. Adaptive integral sliding mode based course keeping control of unmanned surface vehicle. J. Mar. Sci. Eng. 2022, 10, 68. [Google Scholar] [CrossRef]
- Hu, S.; Yang, P.; Chang, B. Robust nonlinear ship course-keeping control by H∞ I/O linearization and μ-synthesis. Int. J. Robust Nonlinear Control 2003, 13, 55–70. [Google Scholar] [CrossRef]
- Zheng, Y.; Tao, J.; Sun, Q.; Sun, H.; Sun, M.; Chen, Z. An intelligent course keeping active disturbance rejection controller based on double deep Q-network for towing system of unpowered cylindrical drilling platform. Int. J. Robust Nonlinear Control 2021, 31, 8463–8480. [Google Scholar] [CrossRef]
- Omerdic, E.; Roberts, G.; Vukic, Z. A fuzzy track-keeping autopilot for ship steering. J. Mar. Eng. Technol. 2003, 2, 23–35. [Google Scholar] [CrossRef]
- Xiong, Y.; Pan, L.; Xiao, M.; Xiao, H. Motion control and path optimization of intelligent AUV using fuzzy adaptive PID and improved genetic algorithm. Math. Biosci. Eng. 2023, 20, 9208–9245. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Ma, Y.; Hu, S. Event-Triggered Adaptive PID Fault-Tolerant Control of Underactuated ASVs Under Saturation Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4922–4933. [Google Scholar] [CrossRef]
- Chen, C.; Evert, L.; Guillaume, D. Experimental study of adaptive course controllers with nonlinear modulators for surface ships in shallow water. ISA Trans. 2023, 134, 417–430. [Google Scholar] [CrossRef] [PubMed]
- Ju, X.; Li, J.; Du, P. A novel non-fragile H∞ fault-tolerant course-keeping control for uncertain unmanned surface vehicles with rudder failures. Ocean Eng. 2023, 280, 114781. [Google Scholar]
- Zhang, G.; Liu, S.; Li, B.; Zhang, X. Robust composite dynamic event-triggered control for multiple USVs with DLLOS guidance. J. Mar. Sci. Eng. 2022, 10, 227. [Google Scholar] [CrossRef]
- Borgers, D.; Heemels, H. Event-separation properties of event-triggered control systems. IEEE Trans. Autom. Control 2014, 59, 2644–2656. [Google Scholar] [CrossRef]
- Zhang, G.; Gao, S.; Li, J.; Zhang, W. Adaptive neural fault-tolerant control for course tracking of unmanned surface vehicle with event-triggered input. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2021, 235, 1594–1604. [Google Scholar] [CrossRef]
- Zhou, L.; Shen, Z.; Nie, Y.; Yu, H. Event-triggered adaptive dynamic programming for optimal tracking control of unmanned surface vessel with input constraints. Trans. Inst. Meas. Control 2023. [Google Scholar] [CrossRef]
- Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M. Dynamic event-triggered adaptive neural output feedback control for MSVs using composite learning. IEEE Trans. Intell. Transp. Syst. 2023, 24, 787–800. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, S. Event-Triggered Fuzzy Adaptive Output Feedback Containment Fault-Tolerant Control for Nonlinear Multi-agent Systems against Actuator Faults. Eur. J. Control 2023, 100887. [Google Scholar] [CrossRef]
- Hu, X.; Wei, X.; Han, J.; Zhu, X. Adaptive disturbance estimation and cancelation for ships under thruster saturation. Int. J. Robust Nonlinear Control 2020, 30, 5004–5020. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J. Robust sliding mode control for a USV water-jet system. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 851–857. [Google Scholar] [CrossRef]
- Fan, Y.; Qiu, B.; Liu, L.; Yang, Y. Global fixed-time trajectory tracking control of underactuated USV based on fixed-time extended state observer. ISA Trans. 2023, 132, 267–277. [Google Scholar] [CrossRef]
- Park, B.S.; Kwon, J.W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Jia, Z.; Hu, Z.; Zhang, W. Adaptive output-feedback control with prescribed performance for trajectory tracking of underactuated surface vessels. ISA Trans. 2019, 95, 18–26. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X. Event-triggered composite adaptive fuzzy output-feedback control for path following of autonomous surface vessels. IEEE Trans. Fuzzy Syst. 2020, 29, 2701–2713. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, D.; Li, T.; Han, M. Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance. IEEE Trans. Cybern. 2019, 50, 2527–2535. [Google Scholar] [CrossRef] [PubMed]
- Xia, X.; Yang, Z.; Yang, T. Leader–Follower Formation Tracking Control of Underactuated Surface Vehicles Based on Event-Trigged Control. Appl. Sci. 2023, 13, 7156. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Items | Value |
|---|---|---|
| −1 | ||
| 0 | ||
| Initial states | 0 | |
| 0 | ||
| [0, 0] | ||
| Design parameters | k | 4 |
| 20 | ||
| 0.01 | ||
| 5 | ||
| diag ([0.1, 0.1]) | ||
| 0.02 | ||
| 5 | ||
| 0.1 | ||
| 5 | ||
| c | 0.1 | |
| 5 | ||
| 1 | ||
| 4 | ||
| 0.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhi, H.; Pan, B.; Zhu, G. Event-Sampled Adaptive Neural Course Keeping Control for USVs Using Intermittent Course Data. Appl. Sci. 2023, 13, 10035. https://doi.org/10.3390/app131810035
Zhi H, Pan B, Zhu G. Event-Sampled Adaptive Neural Course Keeping Control for USVs Using Intermittent Course Data. Applied Sciences. 2023; 13(18):10035. https://doi.org/10.3390/app131810035
Chicago/Turabian StyleZhi, Hongyang, Baofeng Pan, and Guibing Zhu. 2023. "Event-Sampled Adaptive Neural Course Keeping Control for USVs Using Intermittent Course Data" Applied Sciences 13, no. 18: 10035. https://doi.org/10.3390/app131810035
APA StyleZhi, H., Pan, B., & Zhu, G. (2023). Event-Sampled Adaptive Neural Course Keeping Control for USVs Using Intermittent Course Data. Applied Sciences, 13(18), 10035. https://doi.org/10.3390/app131810035