
Optimization-Based Input-Shaping Swing Control of Overhead Cranes


Abstract
:Featured Application
Abstract
1. Introduction
- (1)
- Different strategies are used to deal with system uncertainty. The offline PSO method is adopted for the modeling error, and the online adaptive method is adopted for the real-time disturbance, which ensures the performance of swing control.
- (2)
- The search ability of the particle swarm optimization algorithm is ensured. A time-varying inertia weighting coefficient is used, which has a large value and a slow change rate in the early stage but has a small value and a fast change rate in the later stage. This coefficient makes the global and local search capabilities of the particle swarm optimization algorithm well balanced.
- (3)
- The method for the online optimization of the shaper parameters is unique. By adding a feedback link and setting an additional shaper, the optimization of the original shaper parameters is transformed into an adaptive iterative optimization problem of additional shaper parameters, thus avoiding the difficulties encountered in the direct optimization of the original shaper parameters.
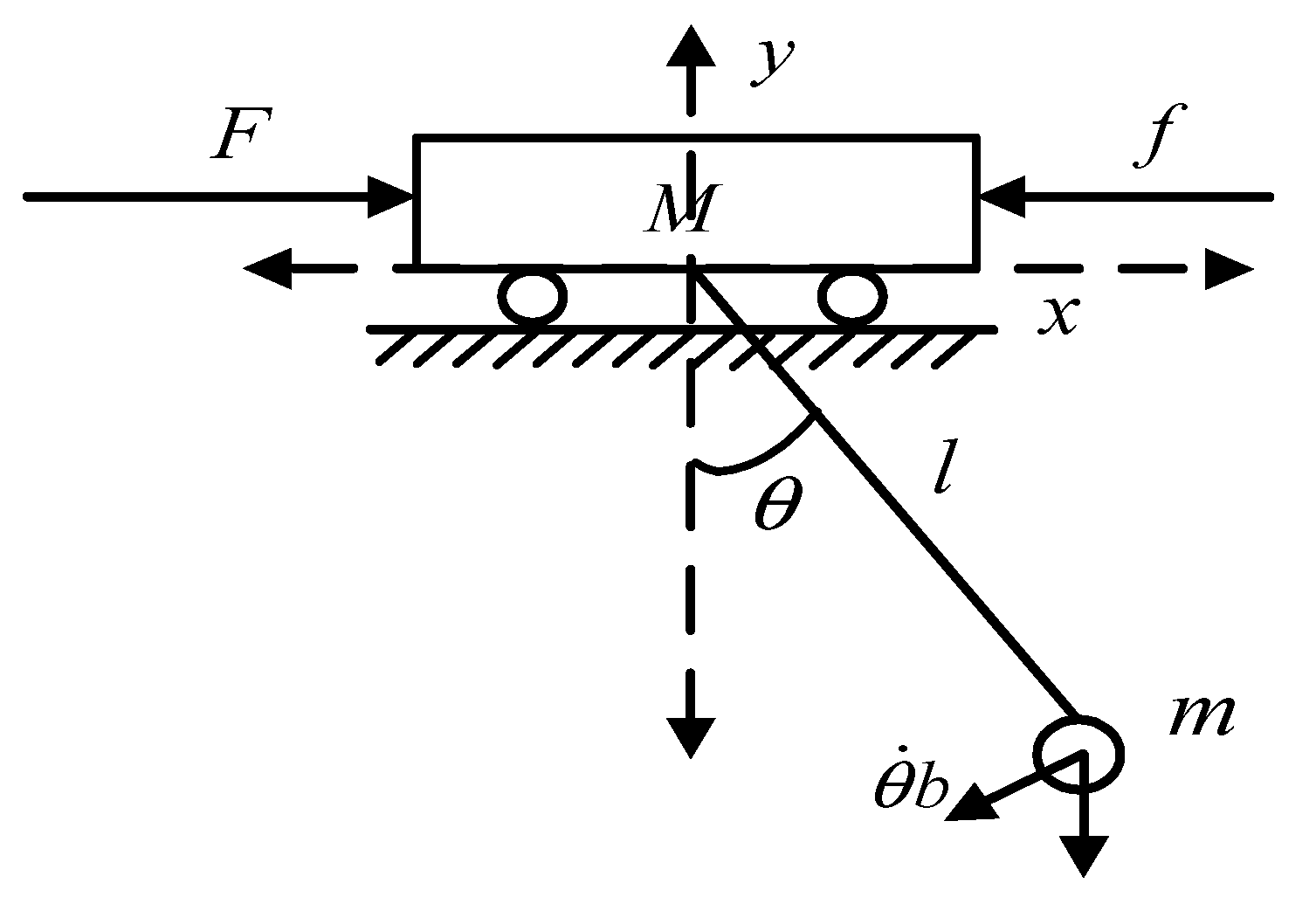
2. Model Description of Overhead Crane
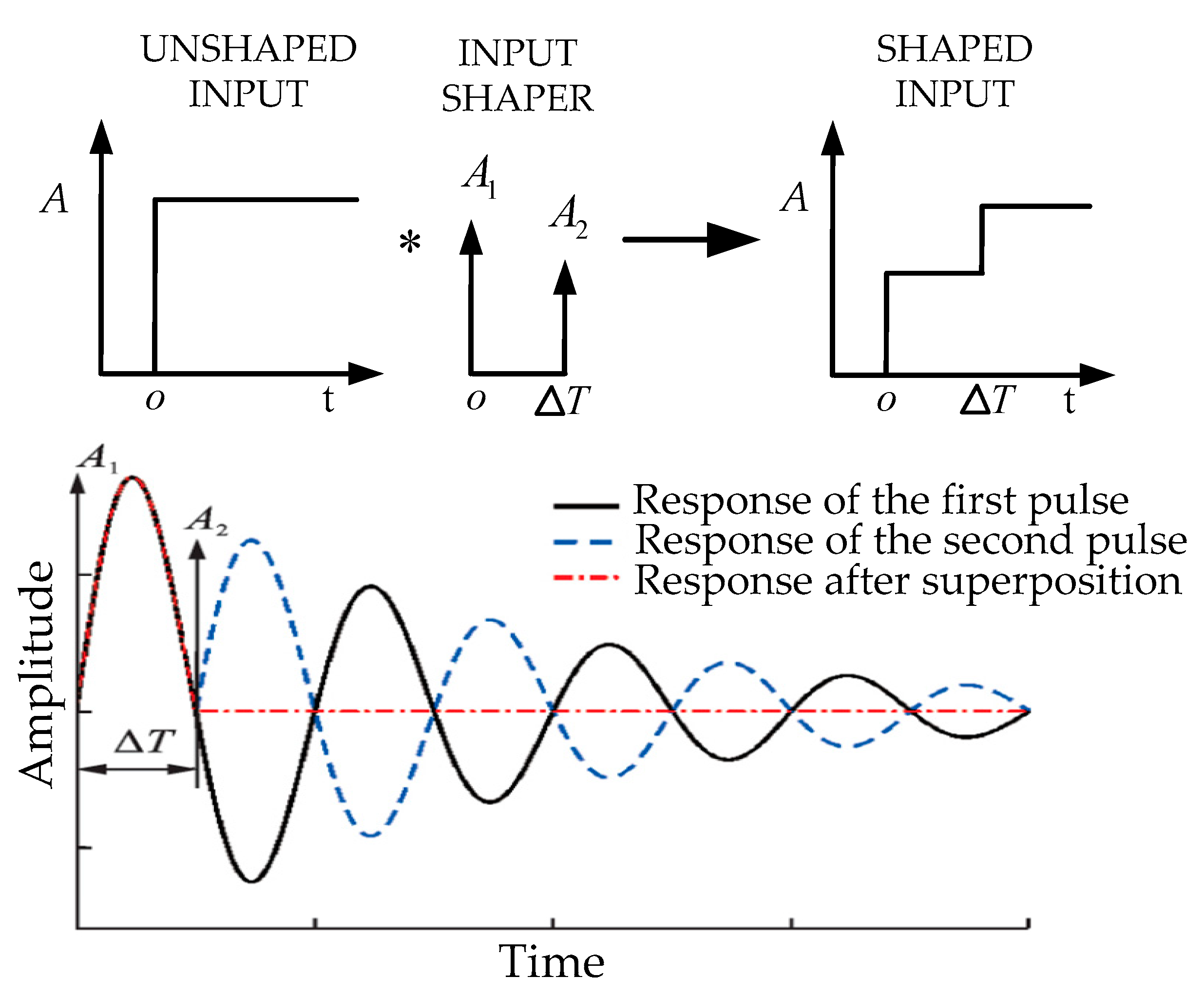
3. Design of Input Shaper
3.1. Design of Shaper Based on Analytical Method
- (a)
- Constraint of residual vibration
- (b)
- Constraint of pulse amplitude
- (c)
- Constraint of optimal pulse time
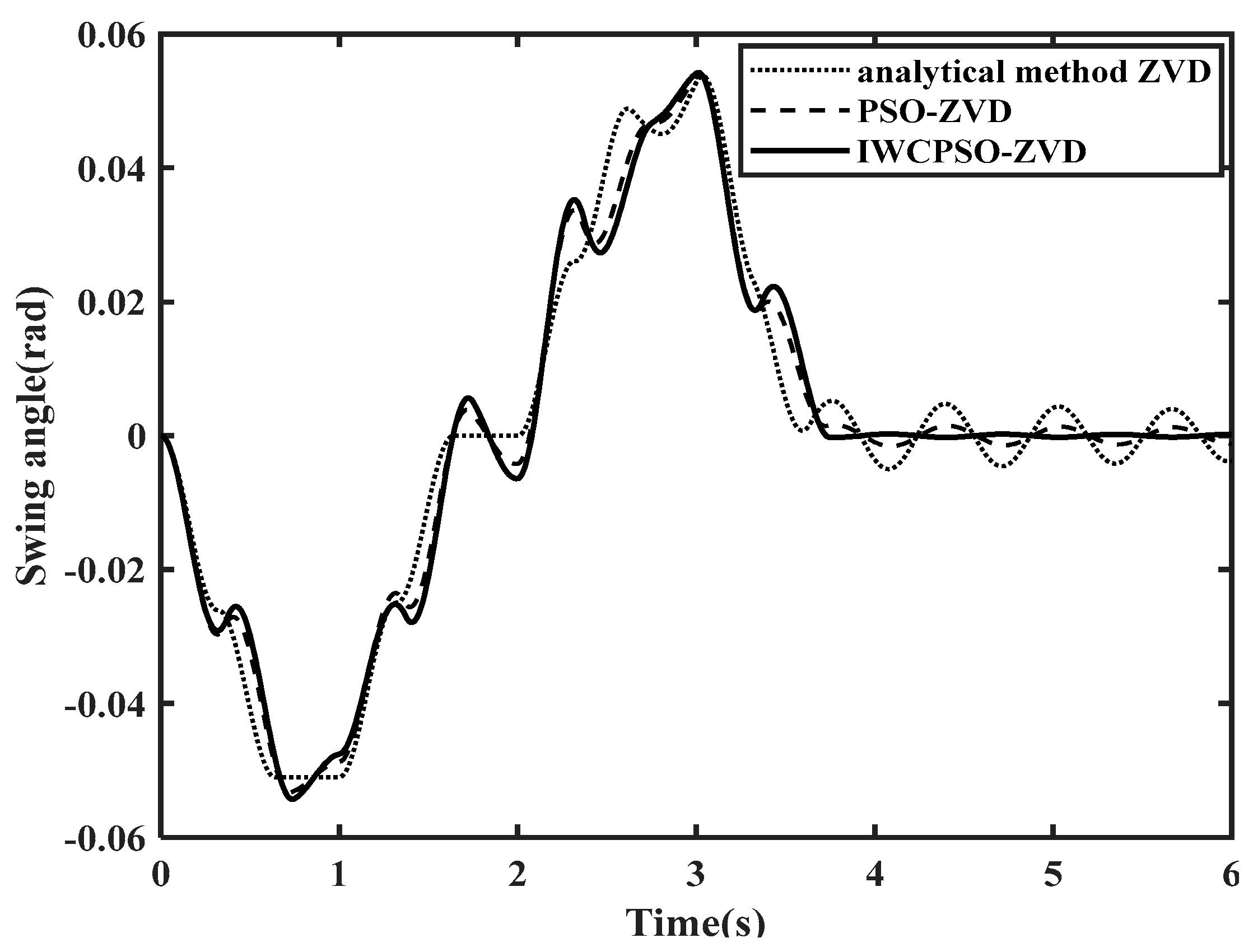
3.2. Optimization of Shaper Based on PSO Algorithm
4. Design of Adaptive Input Shaper
4.1. Adaptive Adjustment of Shaper Parameters
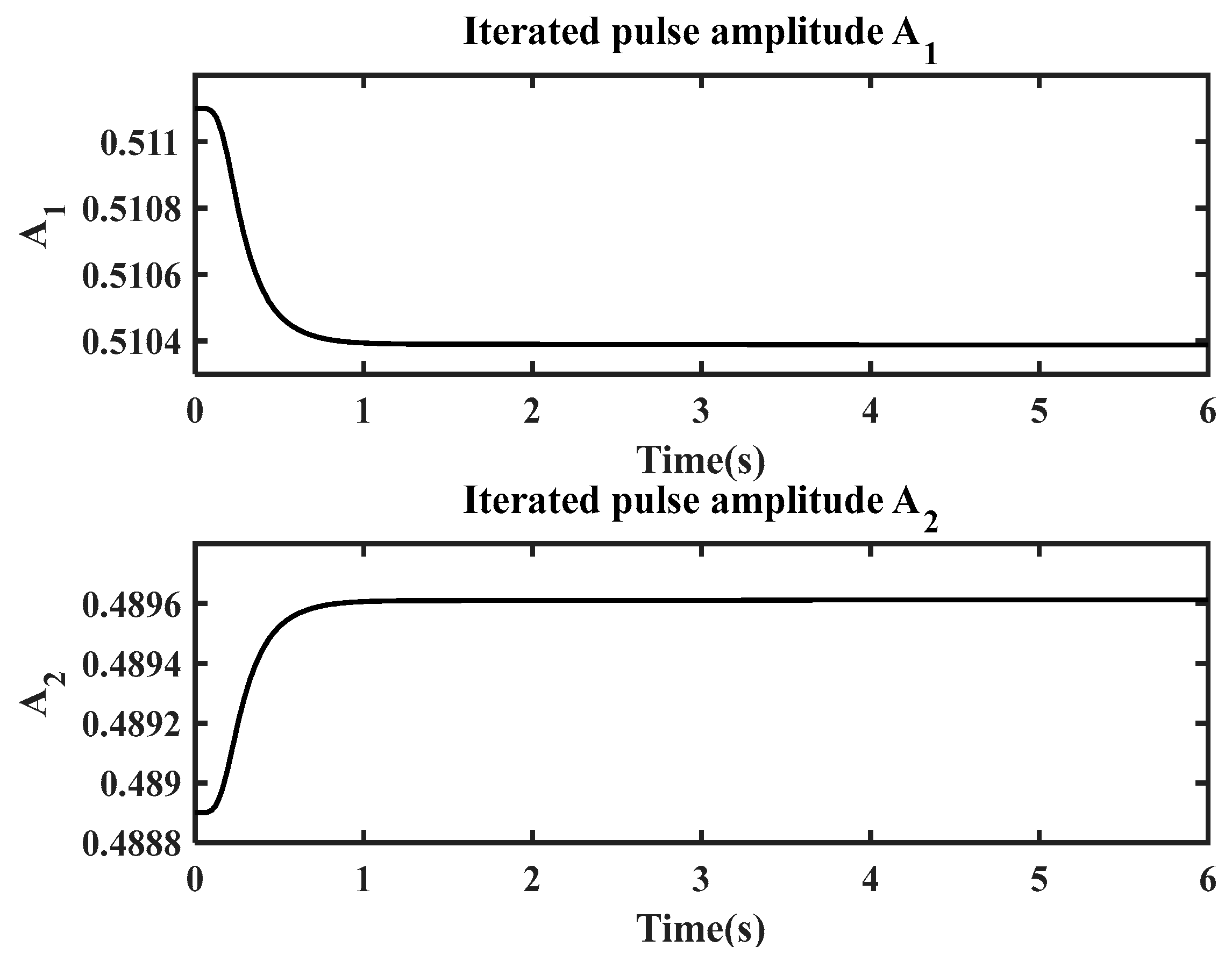
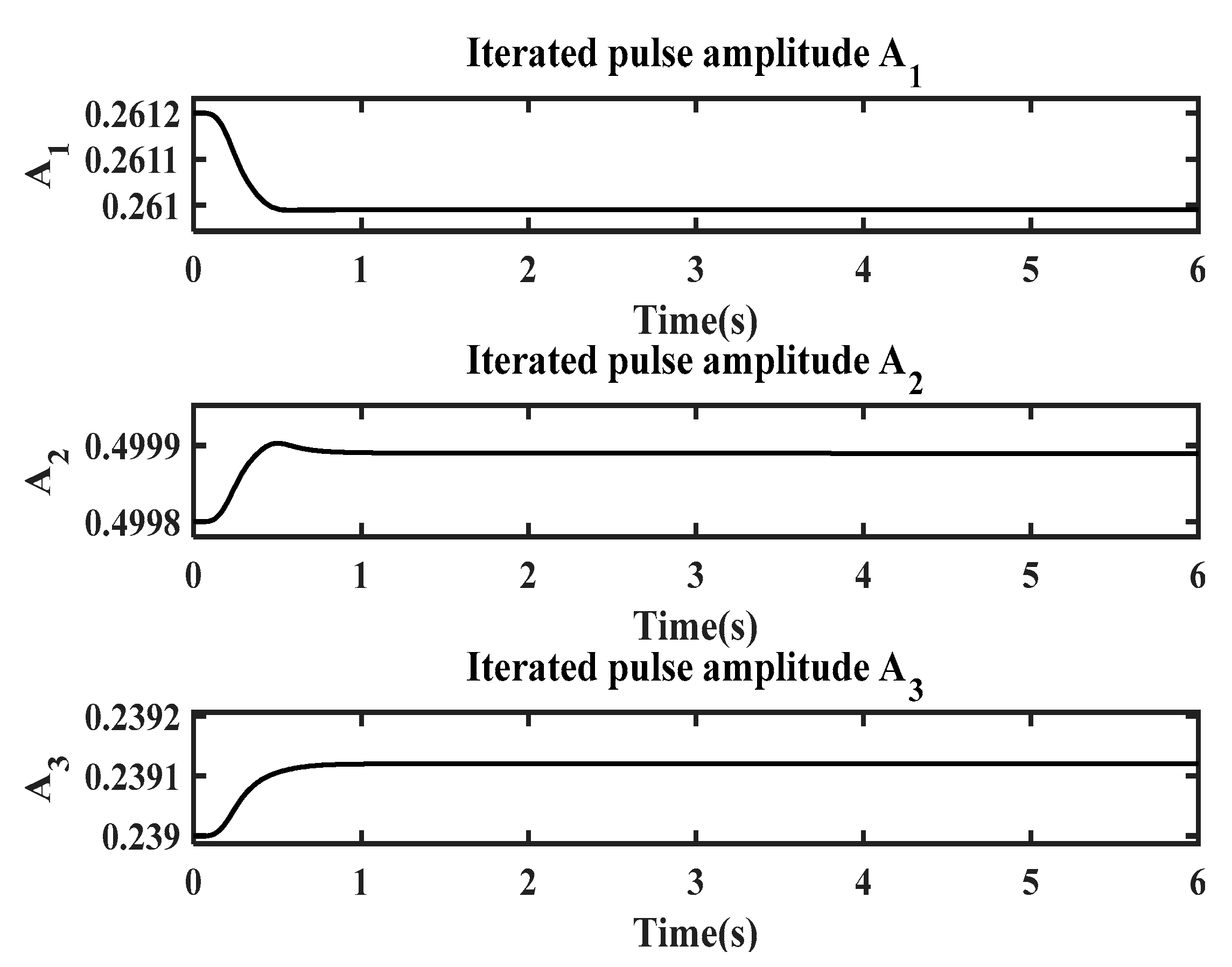
- (i)
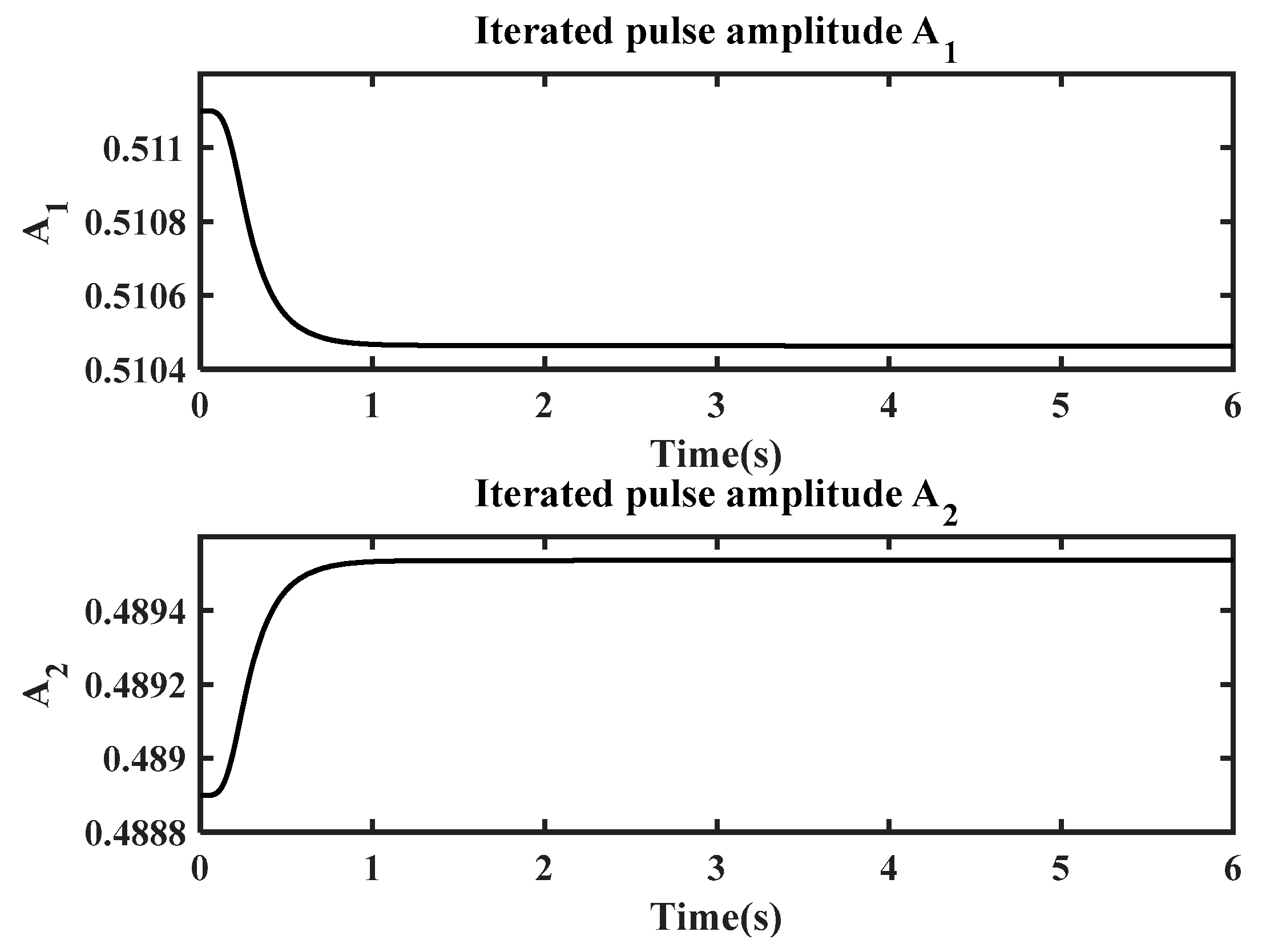
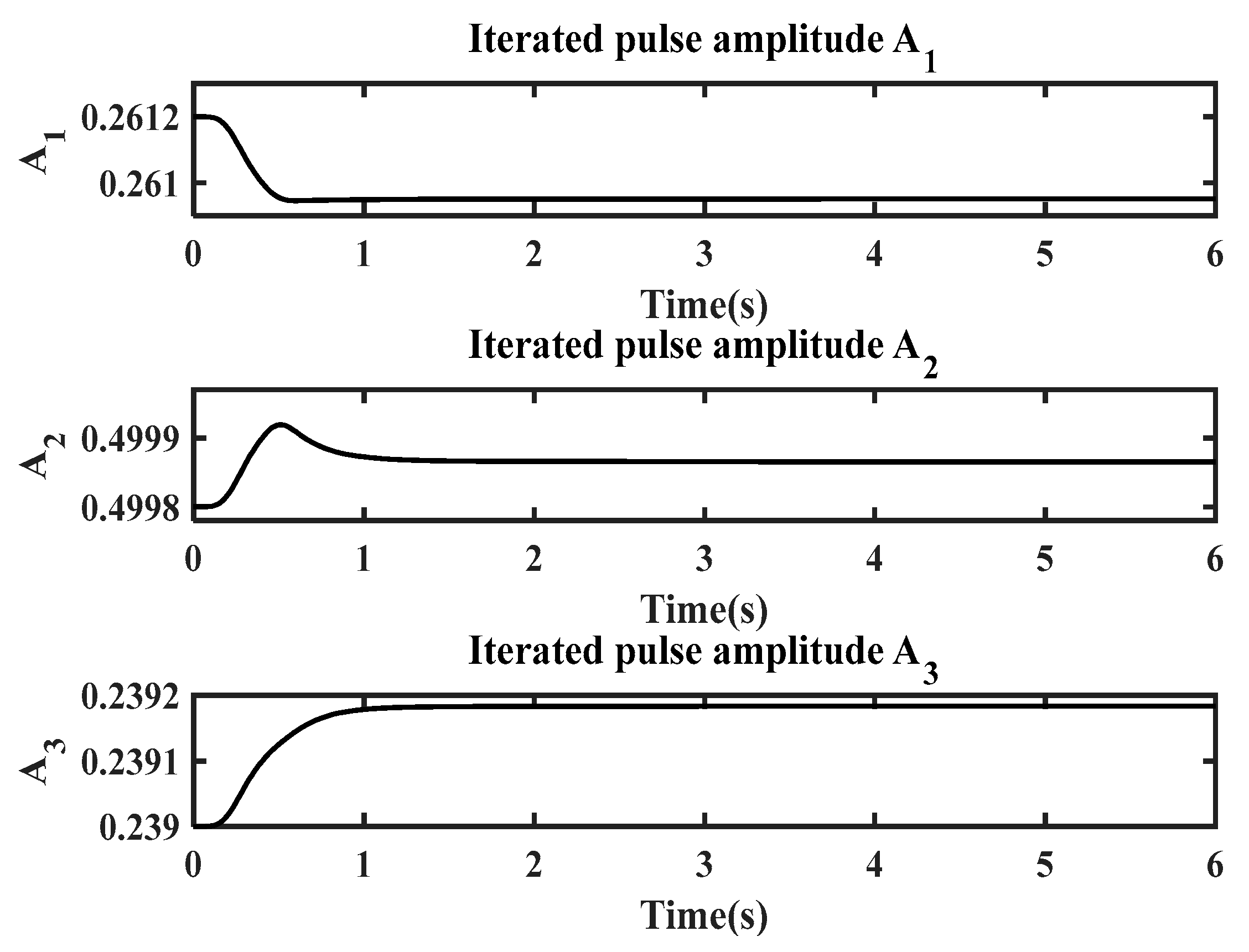
- Solving the optimal pulse amplitude
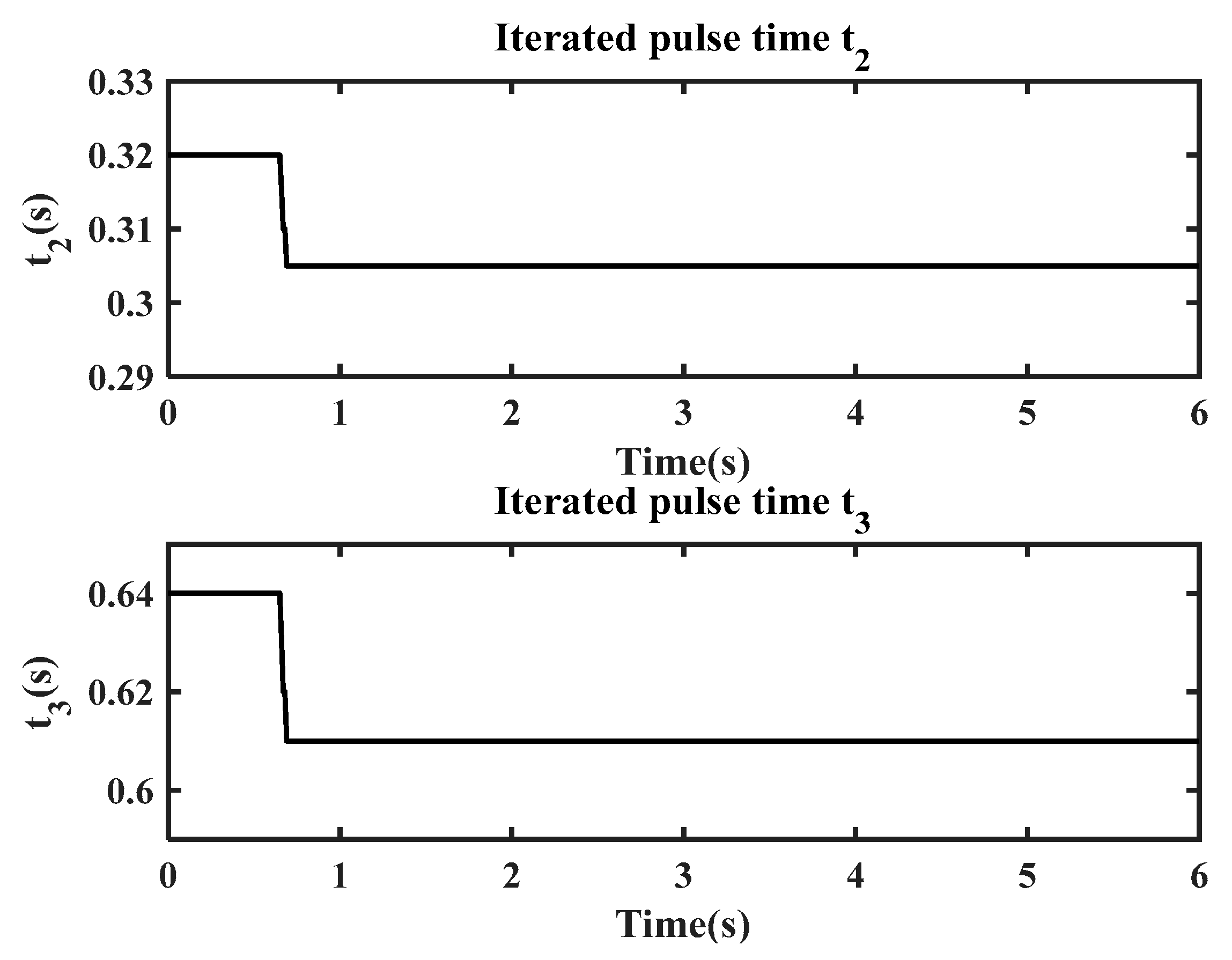
- (ii)
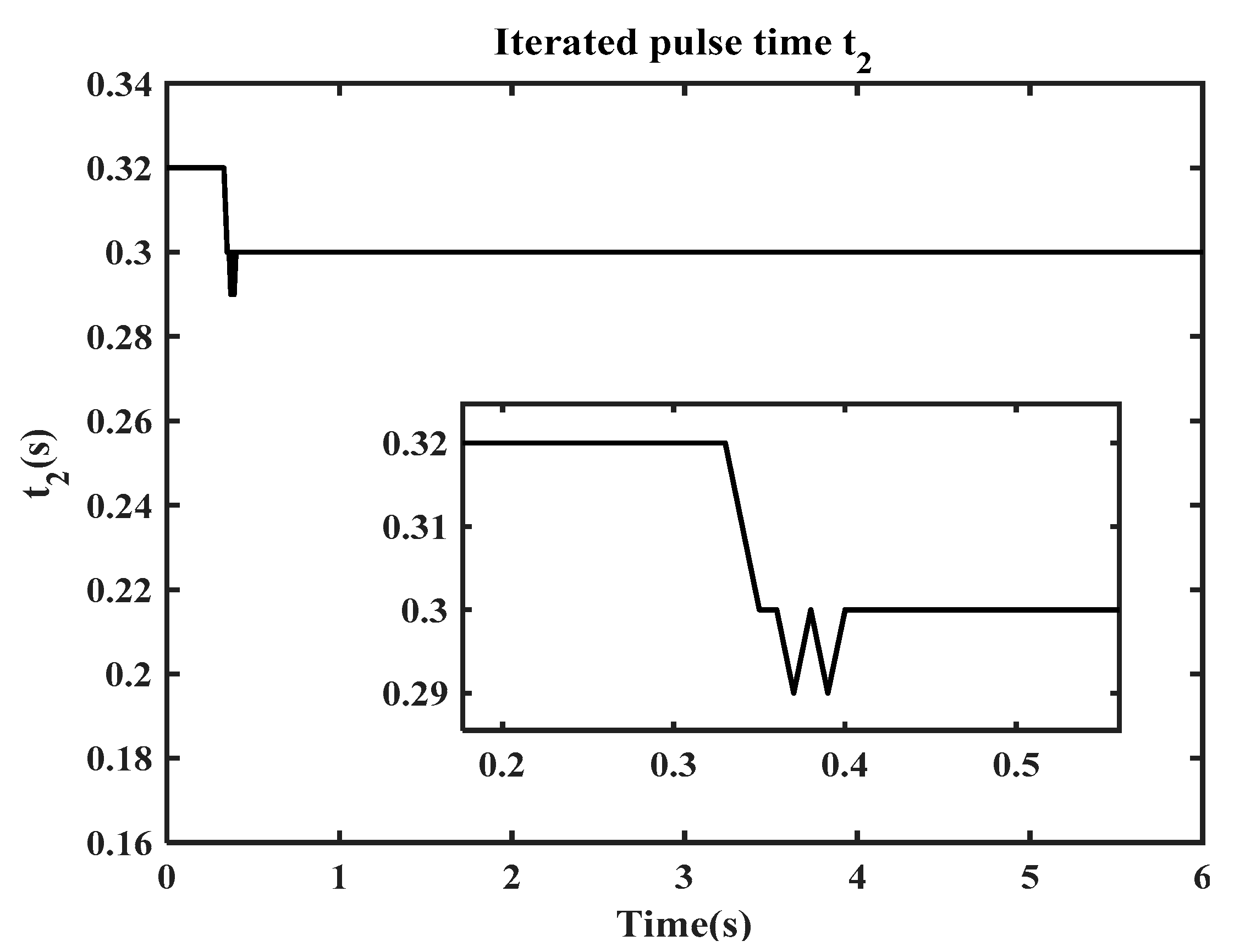
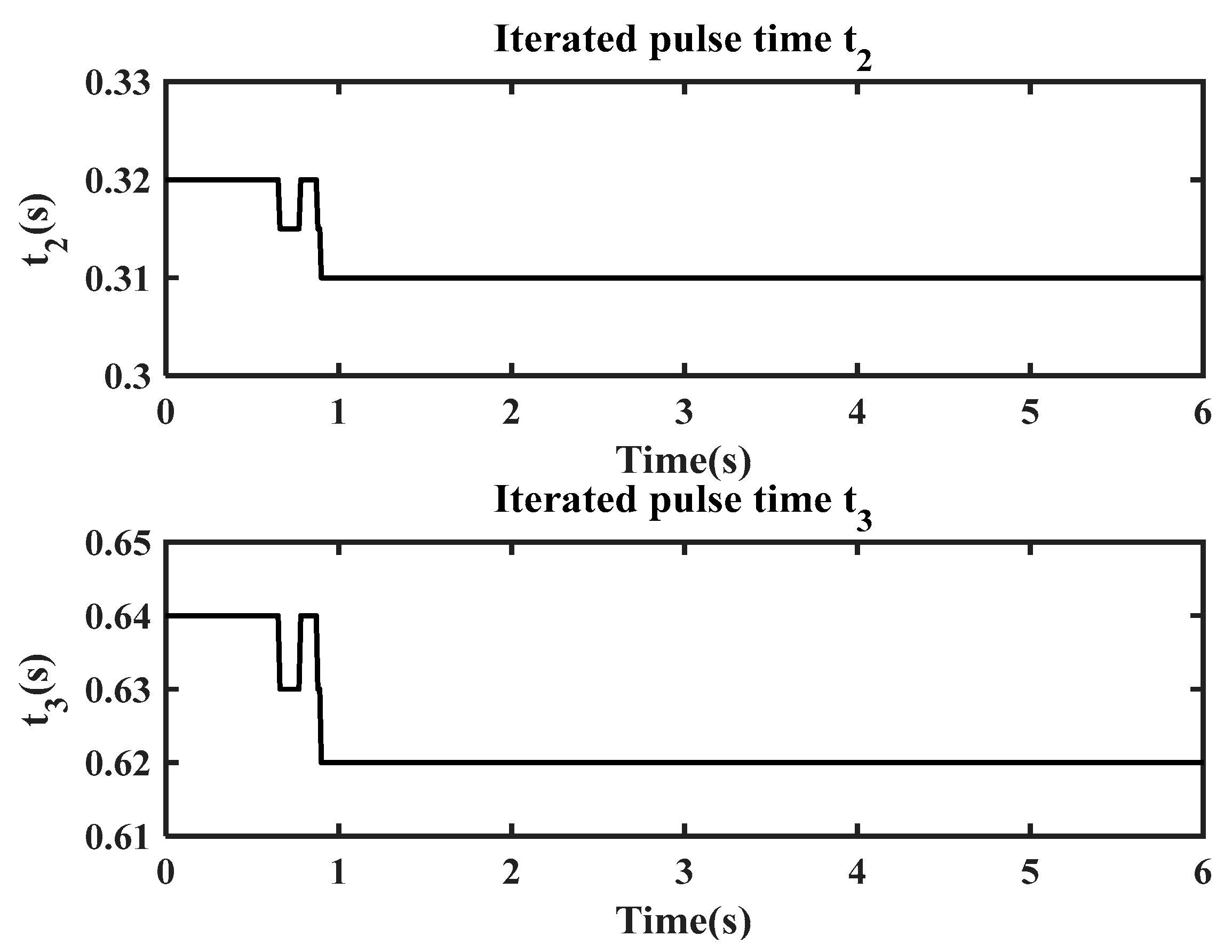
- Solving the optimal pulse time
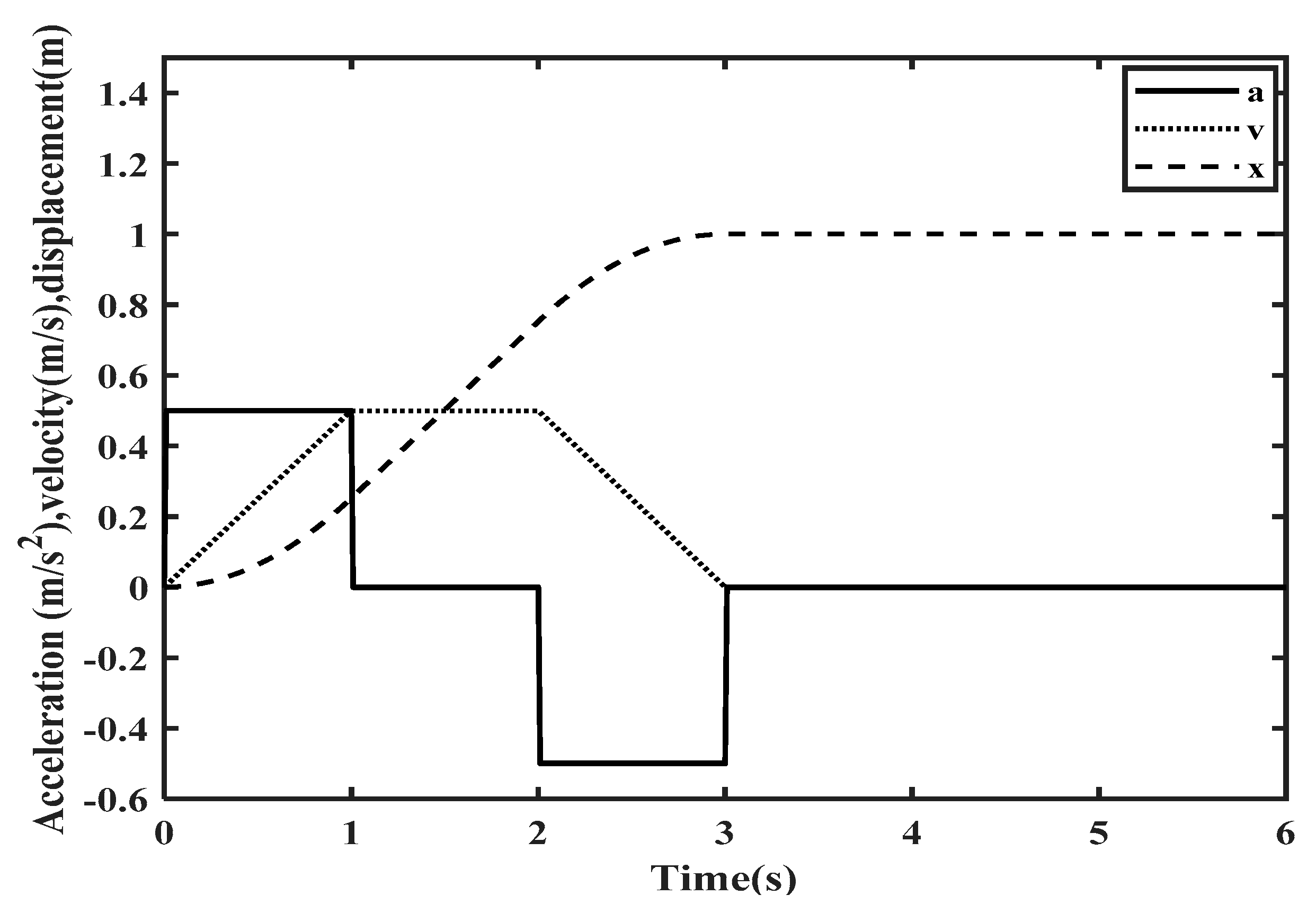
4.2. Verification of Adaptive Input-Shaping Control System
- (I)
- Results of Group 1
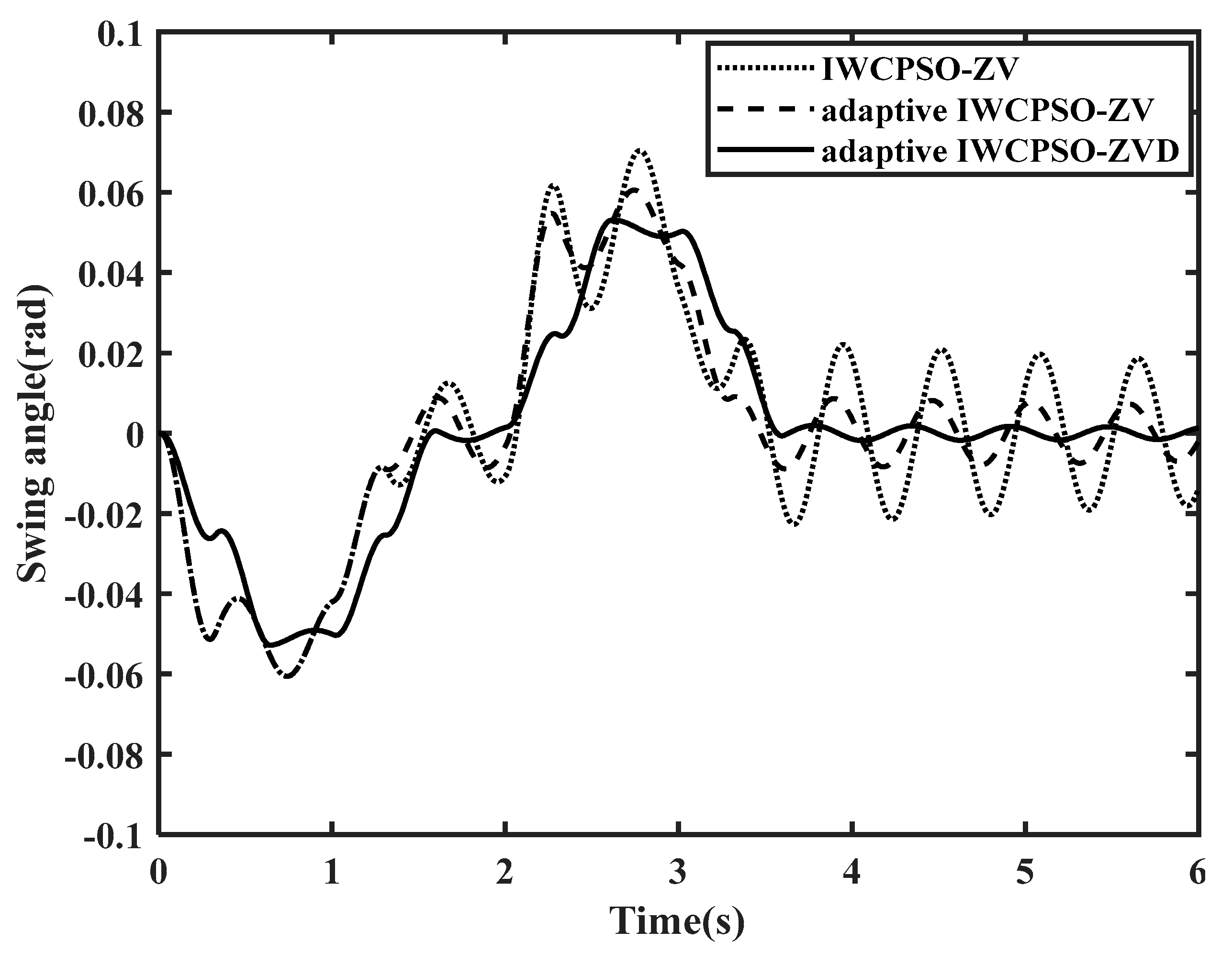
- (II)
- Results of Group 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, S.Z.; He, X.X.; Zhu, H.Y.; Li, X.C.; Liu, X.G. PID-like coupling control of underactuated overhead cranes with input constraints. Mech. Syst. Signal Process. 2022, 178, 109274. [Google Scholar] [CrossRef]
- Mohammed, A.; Alghanim, K.; Taheri, A.M. An adjustable zero vibration input shaping control scheme for overhead crane systems. Shock. Vib. 2020, 2020, 7879839. [Google Scholar] [CrossRef]
- Ramli, L.; Mohamed, Z.; Jaafar, H.I. A neural network-based input shaping for swing suppression of an overhead crane under payload hoisting and mass variations. Mech. Syst. Signal Process. 2018, 107, 484–501. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K.; Lei, M.; He, X. Disturbance-compensation-based continuous sliding mode control for overhead cranes with disturbances. IEEE T. Autom. Sci. Eng. 2020, 17, 2182–2189. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, C.; Ding, J. Online reinforcement learning with passivity-based stabilizing term for real time overhead crane control without knowledge of the system model. Control Eng. Pract. 2022, 127, 105302. [Google Scholar] [CrossRef]
- Ramli, L.; Mohamed, Z.; Efe, M.Ö.; Lazim, I.M.; Jaafar, H.I. Efficient swing control of an overhead crane with simultaneous payload hoisting and external disturbances. Mech. Syst. Signal Process. 2020, 135, 106326. [Google Scholar] [CrossRef]
- Qiu, Z.H.; Sun, N.; Liu, Z.Q.; Yang, T.; Wu, Q.X.; Fang, Y.C. Time-varying input shaping control for dual boom cranes. Control Theory A. 2022, 39, 1–10. (In Chinese) [Google Scholar]
- Arabasi, S.; Masoud, Z. Frequency-modulation input-shaping strategy for double-pendulum overhead cranes undergoing simultaneous hoist and travel maneuvers. IEEE Access 2022, 10, 44954–44963. [Google Scholar] [CrossRef]
- Montonen, J.H.; Nevaranta, N.; Niemelä, M.; Lindh, T. Comparison of extra insensitive input shaping and swing-angle-estimation-based slew control approaches for a tower crane. Appl. Sci. 2022, 12, 5945. [Google Scholar] [CrossRef]
- Mohammed, A.; Alghanim, K.; Andani, M.T. A robust input shaper for trajectory control of overhead cranes with non-zero initial states. Int. J. Dyn. Control. 2021, 9, 230–239. [Google Scholar] [CrossRef]
- Wahrburg, A.; Jurvanen, J.; Niemelä, M.; Holmberg, M. Input shaping for non-zero initial conditions and arbitrary input signals with an application to overhead crane control. In Proceedings of the 17th IEEE International Conference on Advanced Motion Control (AMC), Padova, Italy, 18–20 February 2022; pp. 36–41. [Google Scholar]
- Alghanim, K.; Mohammed, A.; Andani, M.T. An input shaping control scheme with application on overhead cranes. Int. J. Nonlin. Sci. Num. 2019, 20, 561–573. [Google Scholar] [CrossRef]
- Yi, T.; Pei, Q.S.; Li, D.Y.; Wei, S.G.; Jia, D.P.; Zhang, H.L. Optimization of simulation parameters of input shaper based on genetic algorithm. In Proceedings of the 2nd International Conference on Advanced Technologies in Intelligent Control, Environment, Computing & Communication Engineering (ICATIECE), Bangalore, India, 16–17 December 2022; pp. 1–6. [Google Scholar]
- Zhang, T.; Chu, H.; Zou, Y.; Liu, T. A deep reinforcement learning-based optimization method for vibration suppression of articulated robots. Eng. Optimiz. 2023, 55, 1189–1206. [Google Scholar] [CrossRef]
- Maghsoudi, M.J.; Ramli, L.; Sudin, S.; Mohamed, Z.; Husain, A.R.; Wahid, H. Improved unity magnitude input shaping scheme for sway control of an underactuated 3D overhead crane with hoisting. Mech. Syst. Signal Process. 2019, 123, 466–482. [Google Scholar] [CrossRef]
- Maghsoudi, M.J.; Mohamed, Z.; Sudin, S.; Buyamin, S.; Jaafar, H.I.; Ahmad, S.M. An improved input shaping design for an efficient sway control of a nonlinear 3D overhead crane with friction. Mech. Syst. Signal Process. 2017, 92, 364–378. [Google Scholar] [CrossRef]
- Rehman, S.F.; Mohamed, Z.; Husain, A.R.; Jaafar, H.I.; Shaheed, M.H.; Abbasi, M.A. Input shaping with an adaptive scheme for swing control of an underactuated tower crane under payload hoisting and mass variations. Mech. Syst. Signal Process. 2022, 175, 109106. [Google Scholar] [CrossRef]
- Liu, D.X.; Zhang, J.C.; Li, Y.; Fang, J.J. Research on adaptive input shaping control of fruits and vegetable harvesting robot arm. Control Theory A. 2022, 39, 1043–1050. (In Chinese) [Google Scholar]
- Hu, J.; Chu, Z. Adaptive input shaping for flexible systems using an extreme learning machine algorithm identification. In Proceedings of the ELM-2015 Volume 1: Theory, Algorithms and Applications (I), Hangzhou, China, 15–17 December 2015; Springer International Publishing: Cham, Switzerland, 2016; pp. 211–225. [Google Scholar]
- Suksabai, N.; Chuckpaiwong, I. The novel design of the command smoother for sway suppression of industrial overhead crane considering acceleration and deceleration limits. Int. J. Dynam. Control 2023, 11, 2082–2100. [Google Scholar] [CrossRef]
- Singhose, W.; Porter, L.; Kenison, M. Effects of hoisting on the input shaping control of gantry cranes. Control. Eng. Pract. 2000, 8, 1159–1165. [Google Scholar] [CrossRef]
- Du, Y.F.; Wang, C.; Lu, J.C.; Yan, Z. Vibration suppression using multi-impulse robust shaping method of zero vibration and derivative. J. Sound. Vib. 2019, 440, 277–290. [Google Scholar] [CrossRef]
- Kang, C.G.; Hassan, R.; Kim, K.Y. Analysis of a generalized ZVD shaper using impulse vectors. Int. J. Control. Autom. 2020, 18, 2088–2094. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization: An overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | PSO | IWCPSO |
|---|---|---|
| 0.300 | 0.292 | |
| 0.495 | 0.497 | |
| 0.205 | 0.211 | |
| 0.361 | 0.373 | |
| 0.722 | 0.746 |
| Group | Variation Range of the Rope Length (m) | Variation Range of the Load (kg) |
|---|---|---|
| 1 | (−0.01, 0) | (0, +0.05) |
| 2 | (−0.02, 0) | (0, +0.10) |
| Group | Algorithm | Maximum Angle (rad) | Residual Vibration Range (rad) |
|---|---|---|---|
| 1 | IWCPSO-ZV | 0.059 | (−0.012, 0.011) |
| Adaptive IWCPSO-ZV | 0.056 | (−0.003, 0.003) | |
| Adaptive IWCPSO-ZVD | 0.051 | (−0.001, 0.001) | |
| 2 | IWCPSO-ZV | 0.070 | (−0.021, 0.022) |
| Adaptive IWCPSO-ZV | 0.061 | (−0.008, 0.009) | |
| Adaptive IWCPSO-ZVD | 0.053 | (−0.002, 0.002) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, W.; Ma, R.; Wang, W.; Gao, H. Optimization-Based Input-Shaping Swing Control of Overhead Cranes. Appl. Sci. 2023, 13, 9637. https://doi.org/10.3390/app13179637
Tang W, Ma R, Wang W, Gao H. Optimization-Based Input-Shaping Swing Control of Overhead Cranes. Applied Sciences. 2023; 13(17):9637. https://doi.org/10.3390/app13179637
Chicago/Turabian StyleTang, Weiqiang, Rui Ma, Wei Wang, and Haiyan Gao. 2023. "Optimization-Based Input-Shaping Swing Control of Overhead Cranes" Applied Sciences 13, no. 17: 9637. https://doi.org/10.3390/app13179637
APA StyleTang, W., Ma, R., Wang, W., & Gao, H. (2023). Optimization-Based Input-Shaping Swing Control of Overhead Cranes. Applied Sciences, 13(17), 9637. https://doi.org/10.3390/app13179637