

Design and Experiment of the Combined Machine for Transplanting Outcrop of Codonopsis with Micro Ridge Covered with Film

 ,
,
Abstract
1. Introduction
2. Structure and Working Principle of the Machine
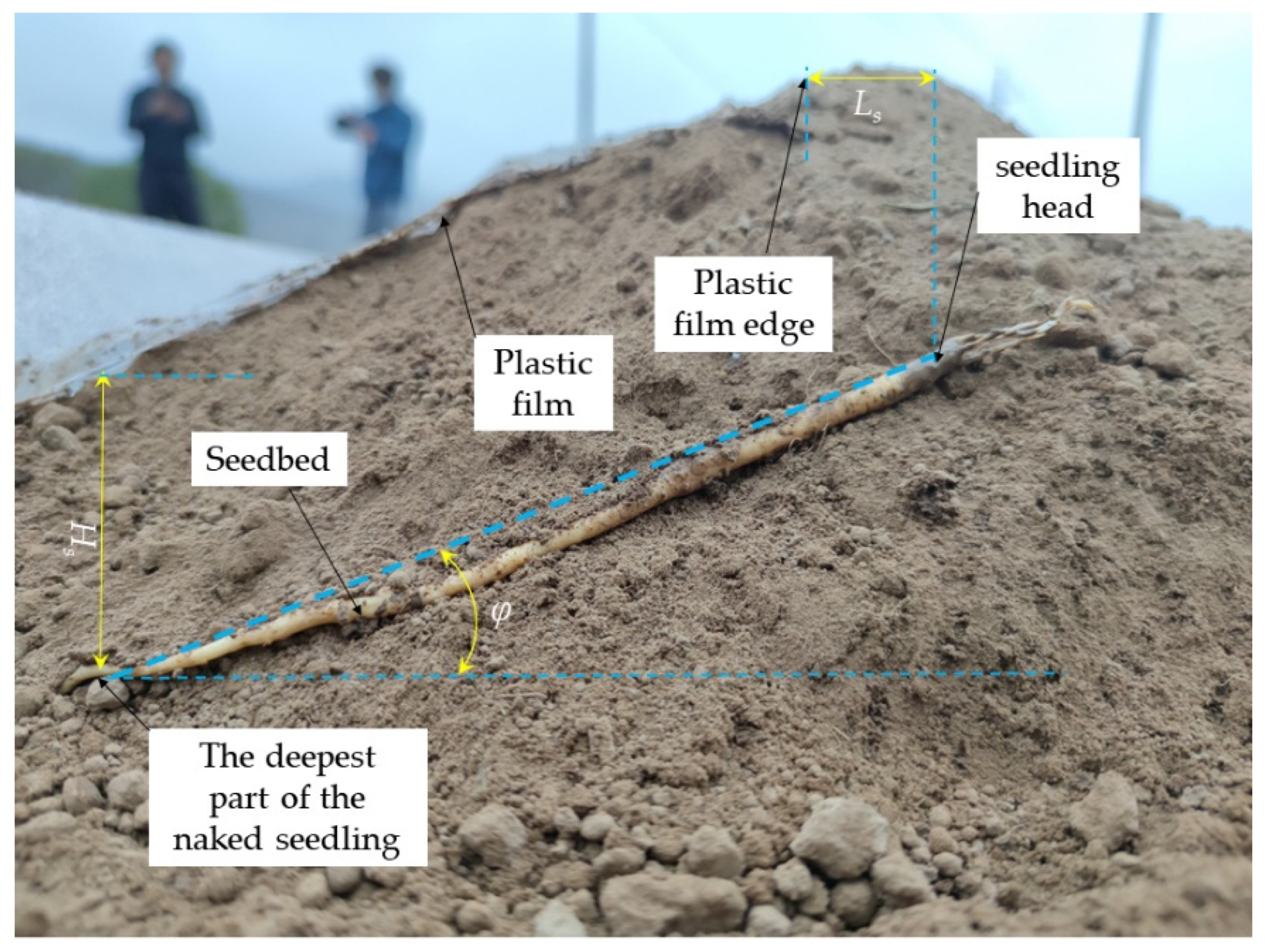
2.1. Agronomic Requirements
2.2. Operation Procedure
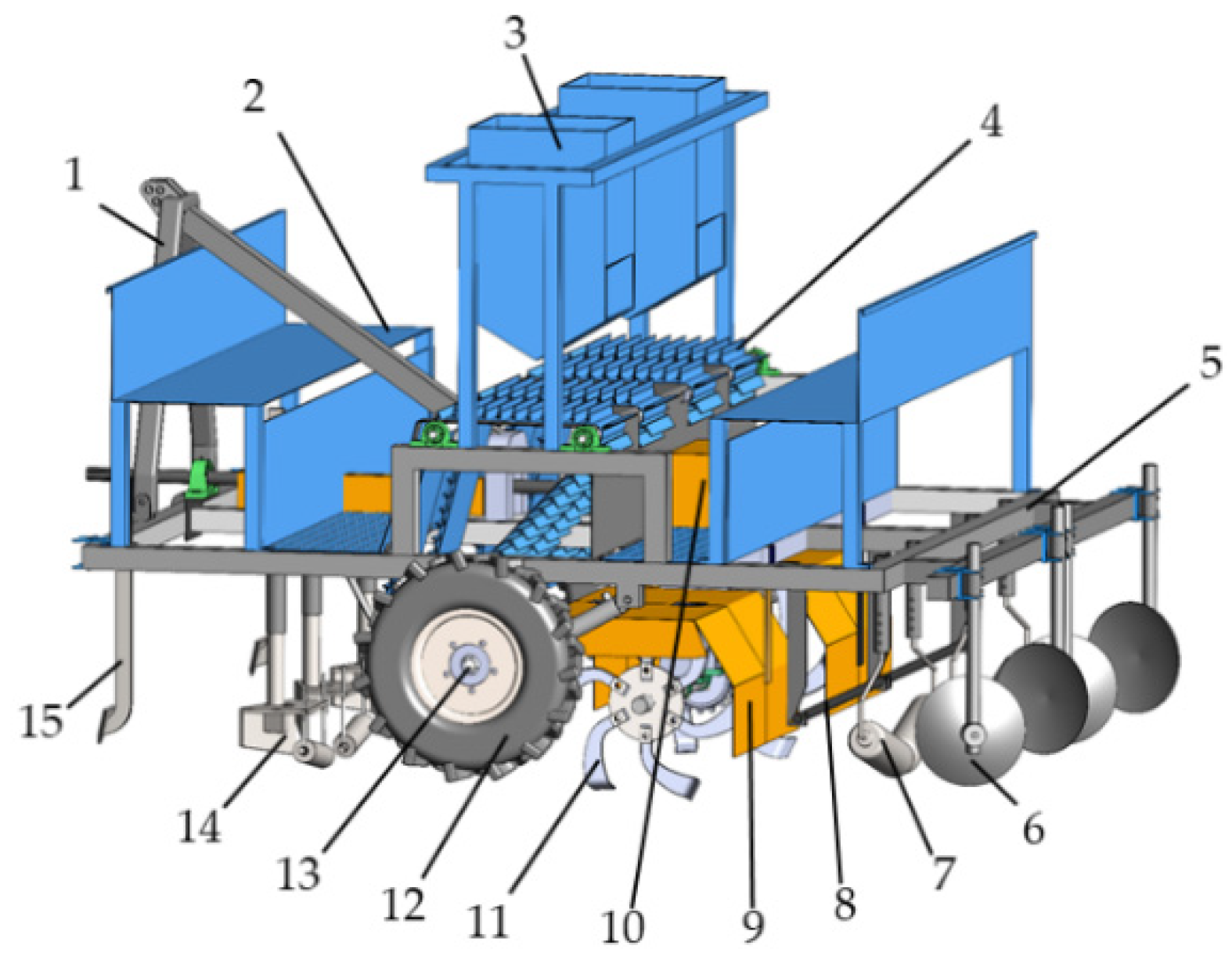
2.3. Structure and Main Technical Parameters of the Machine
2.4. Working Principle
3. Design of Main Working Parts
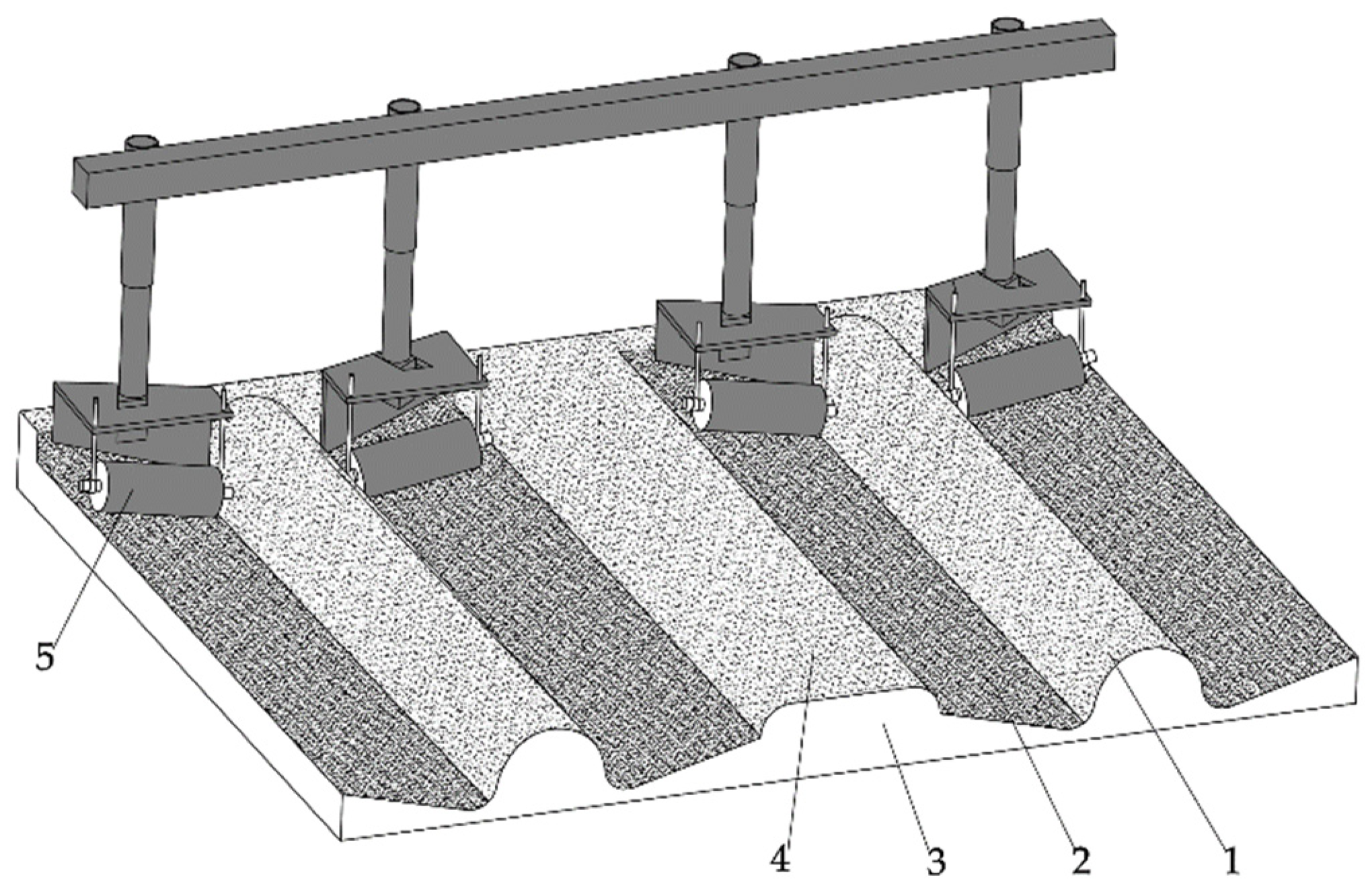
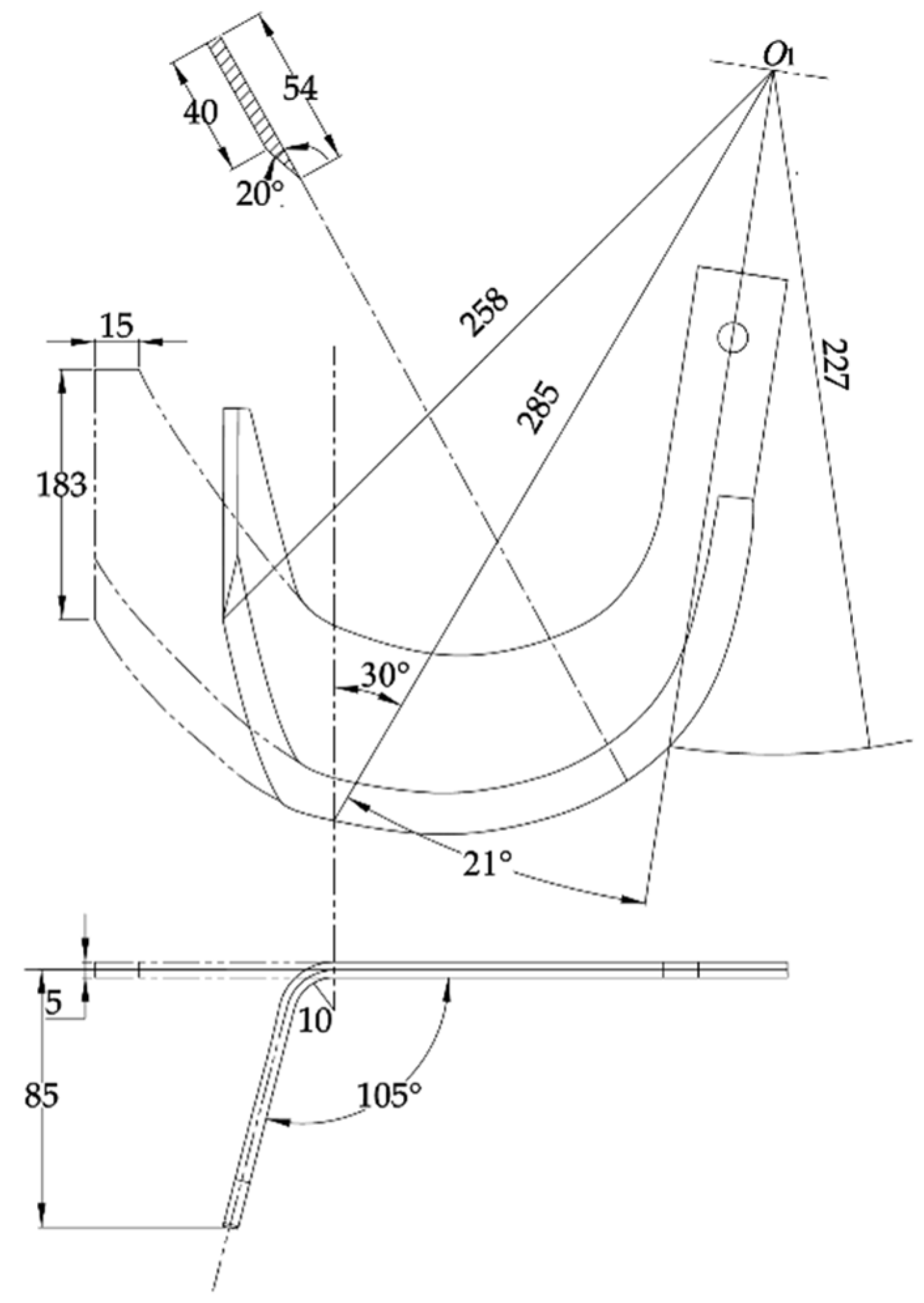
3.1. Seedbed Preparation Device
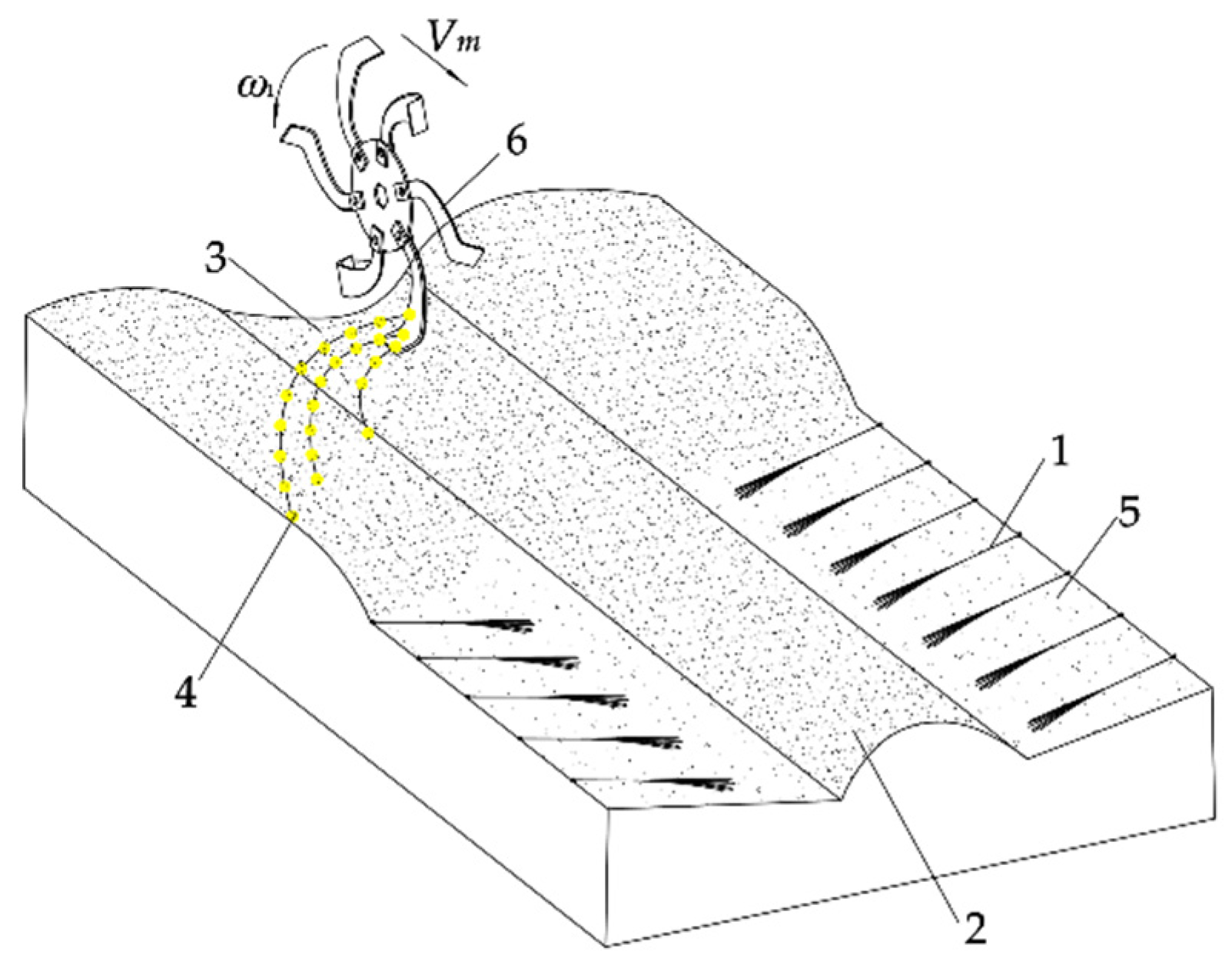
3.1.1. Structure and Operation Principle
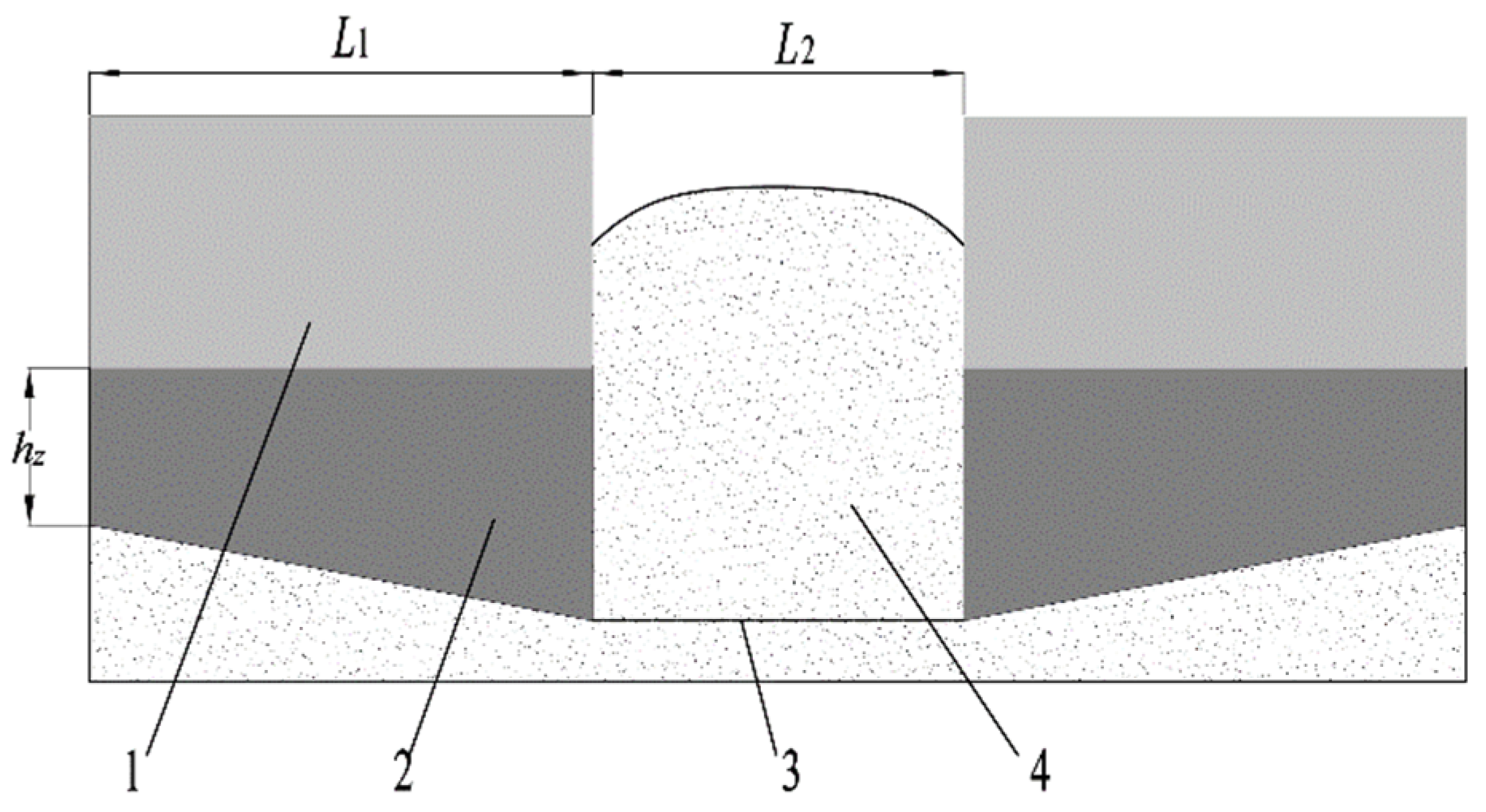
3.1.2. Theoretical Aggregate Amount of Soil

3.1.3. Mechanical Analysis of Shaper
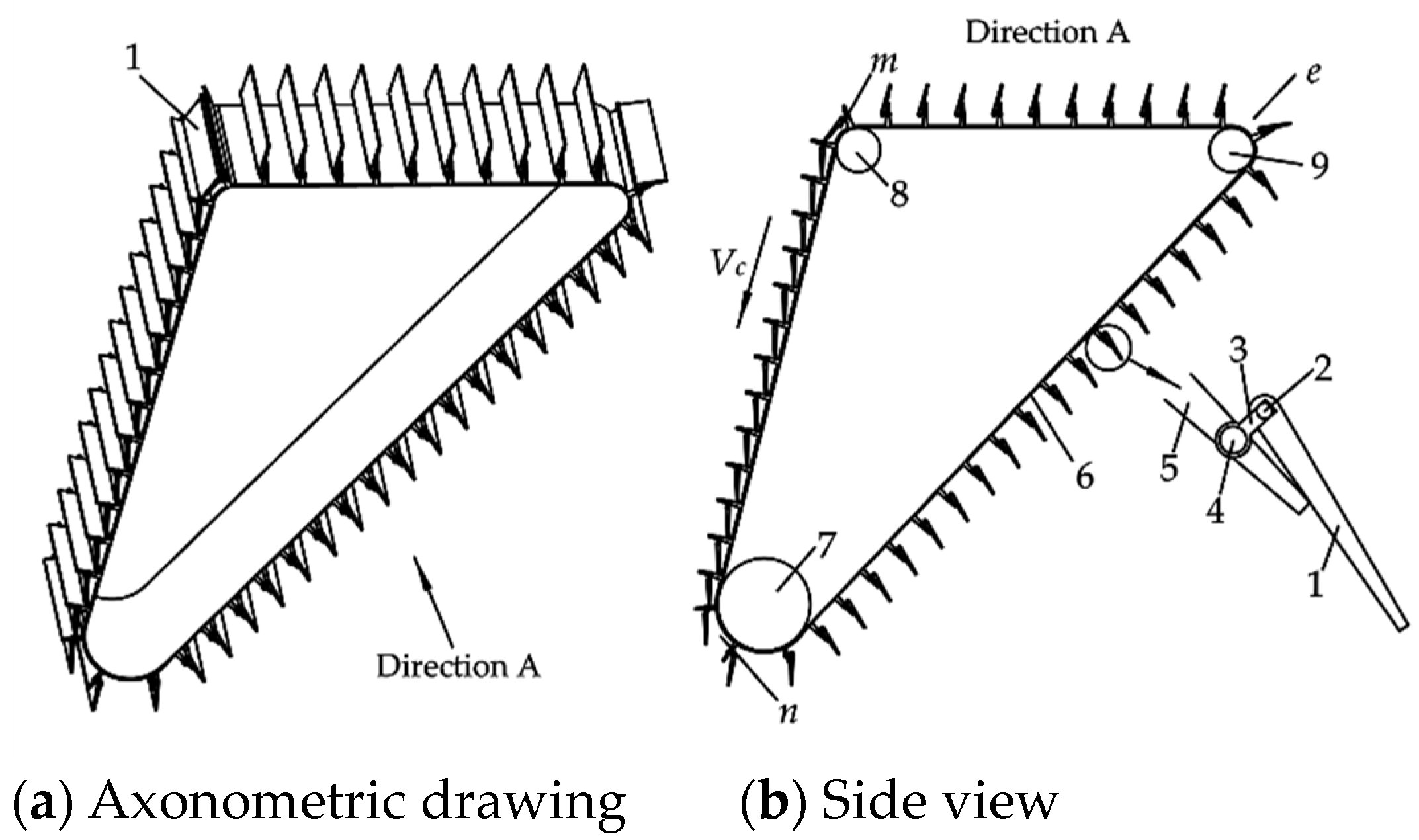
3.2. Seedling-Casting Device
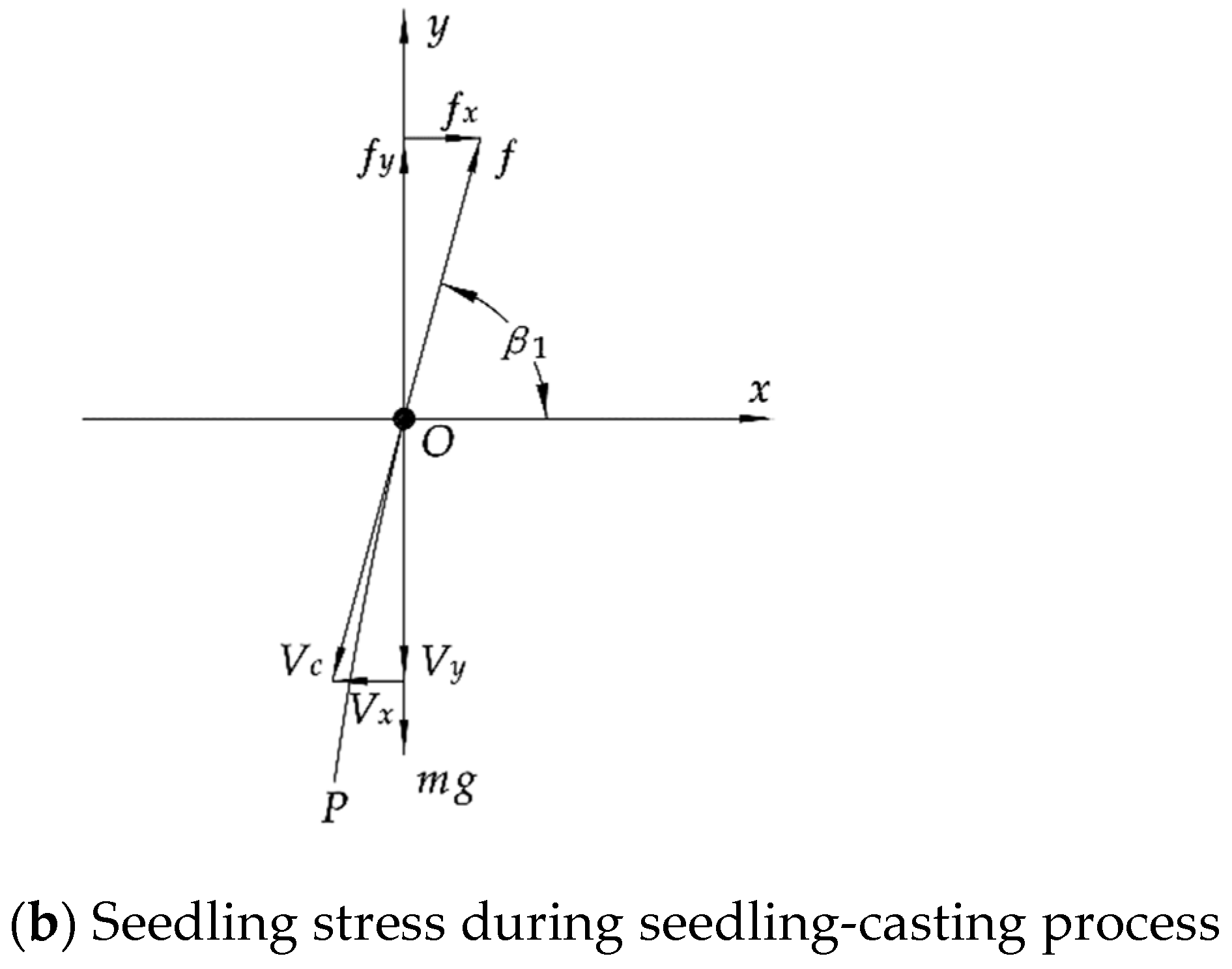
3.2.1. Analysis of Seedling Movement
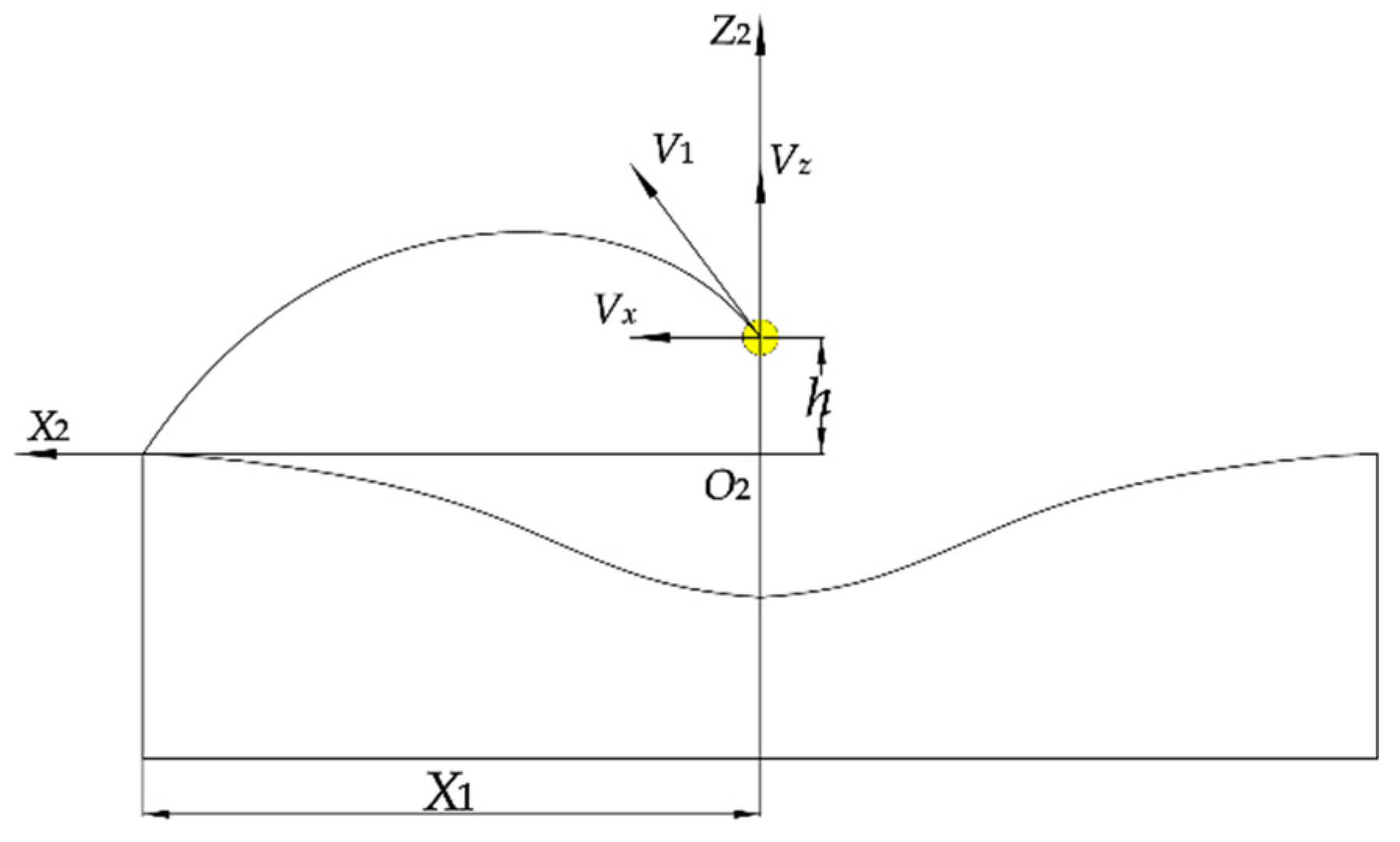
3.2.2. Analysis of the Collision Process between Seedlings and Seedbed
3.3. Rotary Tillage Soil-Covering Device
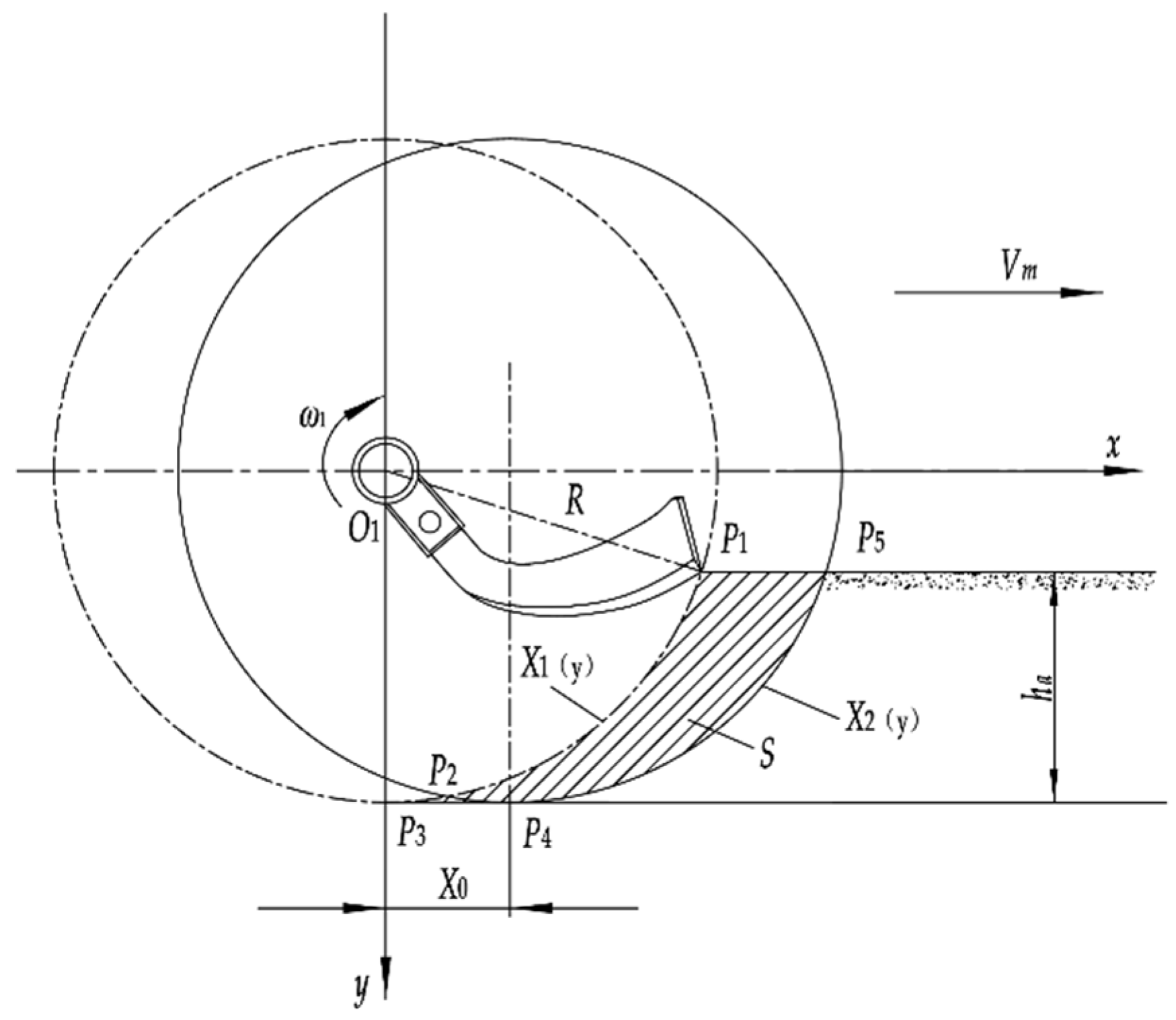
3.3.1. Analysis of Soil-Covering Amount of Rotary Tillage Knife
3.3.2. Analysis of Axial Soil-Transporting Performance of Rotary Tillage Knife


3.4. Film-Covering Device
3.5. The Transmission System
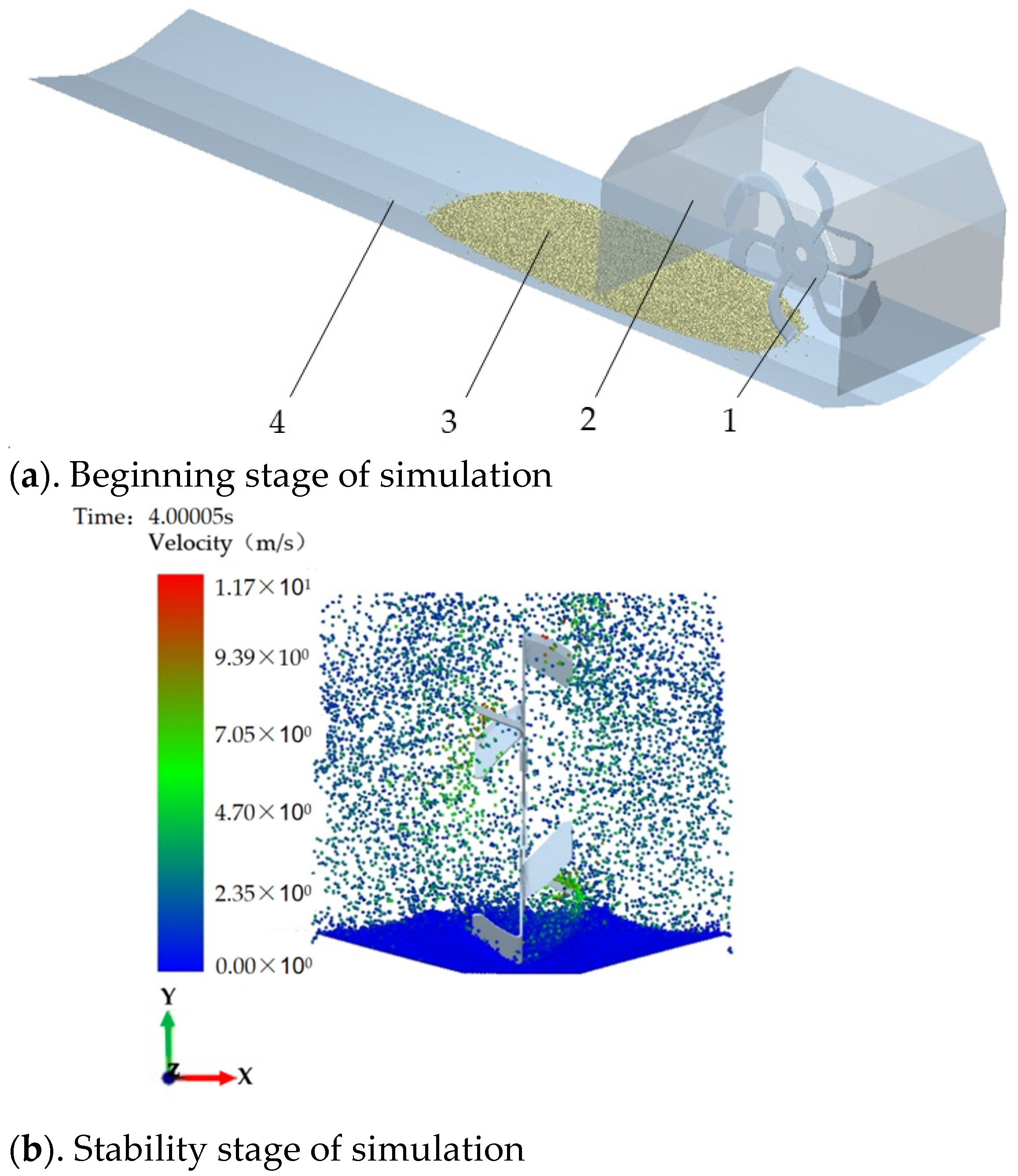
4. Simulation of Rotary Tillage Covering Operation Process
4.1. Setting of Simulation Parameter
4.2. Simulation Process and Result Analysis
5. Field Experiment
5.1. Purpose and Scheme Design of the Experiment
5.2. Accuracy of Seedling Spacing
5.3. Qualified Rate of Planting Depth, Planting Posture, and Film Side Outcrop
5.4. Discussion of Test Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, H. Establishment of Codonopsis industrial technology innovation strategic alliance in Gansu Province. Daily Ganws.com—Gansu Economic Daily, 23 October 2018. [Google Scholar]
- Liu, D.; Gong, Y.; Zhang, X.; Yu, Q.; Zhang, X.; Chen, X.; Wang, Y. EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting. Agriculture 2022, 12, 1238. [Google Scholar]
- Chang, Y. High-yield Cultivation Technology of Codonopsis in Tongwei County. J. Gansu Agric. 2014, 16, 68–70. [Google Scholar]
- Iqbal, M.Z.; Islam, M.N.; Chowdhury, M.; Islam, S.; Park, T.; Kim, Y.J.; Chung, S.O. Working Speed Analysis of the Gear-driven Dibbling Mechanism of a 2.6 kw Walking-type Automatic Pepper Transplanter. Machines 2021, 9, 6. [Google Scholar] [CrossRef]
- Han, L.; Mao, H.; Hu, J.; Kumi, F. Development of a Riding-type Fully Automatic Transplanter for Vegetable Plug Seedlings. Span. J. Agric. Res. 2019, 17, e0205. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of Single Row Automatic Transplanting Device for Potted Vegetable Seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Yan, W.; Hu, M.; Li, K.; Wang, J.; Zhang, W. Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings. Agriculture 2022, 12, 675. [Google Scholar] [CrossRef]
- Xu, G.; Liu, H.; Farman, A.C.; Fang, H.; Jian, S.; He, T. Design and Experiment of Tilting Transplanting Mechanism on Salvia Miltiorrhiza Film. J. Agric. Mach. 2019, 50, 78–89+101. [Google Scholar]
- Wu, G.; An, X.; Yan, B.; Li, L.; He, Y.; Meng, Z. Design and Test Based on Pretreatment of Seedlings with Bare Sweet Potato Seedling Transplanting Machine. J. Agric. Mach. 2022, 53, 99–109. Available online: https://kns.cnki.net/kcms/detail/11.1964.S.20220818.0828.002.html (accessed on 25 October 2022).
- Wang, X.; Song, J.; Liu, C.; Dong, X.; Wang, J.; Zhang, C. Design and Experiment of Liquorice Tilting Transplanting Ditcher. J. Agric. Mach. 2016, 32, 16–23. [Google Scholar]
- Na, M.; Teng, L.; Zhou, K.; Wang, J.; Dong, X.; Zhou, M. Optimization Design and Experiment of Planting Mechanism of Double Operation Machine for Pot seedling Transplanting in dryland. J. Agric. Mach. 2022, 53, 67–73. [Google Scholar]
- Liu, D.; Gong, Y.; Zhang, X.; Chen, X.; Wang, G.; Zhang, X. Design and Experiment of Dry-Farming Cantaloupe Transplanter under Water. Agriculture 2022, 12, 796. [Google Scholar] [CrossRef]
- Wang, J.; Tang, H.; Wang, J.; Lin, N.; Huang, H.; Zhao, Y. Design and Experiment of 1DSZ-350 Suspended Paddy Field Single-side Rotary Tillage Suppression and Construction Machine. J. Agric. Eng. 2017, 33, 25–37. [Google Scholar]
- Shi, L.; Yang, X.; Zhao, W.; Sun, W.; Li, R.; Sun, B. Design and Experiment of a Combined Potato Sowing Machine with Throwing and Lifting Interfilm Soil-covering. J. Agric. Mach. 2018, 49, 129–137. [Google Scholar]
- Sun, W.; Liu, X.; Shi, L.; Zhang, H.; Liu, Q.; Wu, J. Soil Covering Characteristics of Scraper Lift Belt Film Covering Device. J. Mech. Eng. 2016, 52, 38–45. [Google Scholar] [CrossRef]
- Niu, C.; Xu, L.; Duan, Z.; Liu, X.; Ma, S.; Yuan, Q.; Wang, S.; Yuan, X.; Zeng, J.; Chen, C. Development of Hedge Frame Type Grape Soil Removal and Cold-proof Cloth Recovery Machine in Winter. J. Agric. Eng. 2020, 36, 50–58. [Google Scholar]
- Ma, S.; Xu, L.; Xing, J.; Yuan, Q.; Yu, C.; Duan, Z.; Chen, C.; Zeng, J. Development of Rotary Vane Removal Machine for Grape Vine Soil Burial. J. Agric. Eng. 2018, 34, 1–10. [Google Scholar]
- Yang, Q.; He, M.; Shi, L.; Shi, A.; Zhao, X. Study on Interaction between Wine-grape Scraper and Cold-proof Soil. J. Agric. Eng. 2021, 37, 21–30. [Google Scholar]
- Hu, M.; Zhang, W.; Ji, Y.; Qi, B.; Xia, Q.; Li, K. Influence of Hole Tray Seedling with Biodegradable Pot Transplanting on Pepper Growth Character. J. Chin. Agric. Mech. 2020, 41, 57–62. [Google Scholar] [CrossRef]
- Hu, L.; Wang, B.; Wang, G.; Yu, Z.; You, Z.; Hu, Z.; Wang, B.; Gao, X. Design and Experiment of 2ZGF-2 Compound Planting Machine for Sweet potato. J. Agric. Eng. 2016, 32, 8–16. [Google Scholar]
- Yuan, T.; Wang, D.; Wen, Y.; Zhu, S.; Chen, Y.; Tan, Y. Design and Experiment of Air-blown Vibration Compound Seedling Taking Mechanism of Vegetable Transplanter. J. Chin. Agric. Mech. 2019, 50, 80–87. [Google Scholar]
- Fang, H.; Ji, C.; Chandio, F.A.; Guo, J.; Zhang, Q.; Arslan, C. Analysis of Soil Motion Behavior During Rotary Tillage Based on Discrete Element Method. J. Agric. Mach. 2016, 47, 22–28. [Google Scholar]
- Tan, H.; Xu, L.; Ma, S.; Niu, C.; Yan, C.; Shen, C. Design and Test of Scraper Organic Fertilizer Strip Mixed with the Rotary Tillage Machinery of Fertilizer. J. Agric. Mach. 2022, 53, 163–175. Available online: http://kns.cnki.net/kcms/detail/11.1964.s.20220928.1749.008.html (accessed on 14 October 2022).
- Liao, Q.; Du, W.; Zhang, Q.; Lin, J.; Chen, Z.; Zhang, J. Design and Test of Cigar Tobacco Adjustable Seedbed Ridging Membrane Machine. J. Agric. Mach. 2022, 1–13. Available online: http://kns.cnki.net/kcms/detail/11.1964.s.20221108.1209.006.html (accessed on 17 December 2022).
- Sun, J.; Liu, Q.; Luo, P.; Yang, F.; Liu, Z.; Wang, Z. Study on Soil Erosion Law of Slope Contour Tilling by Tractor in Mountain. J. Agric. Mach. 2022, 53, 44–56. [Google Scholar]
- Chen, B.; Chen, X.; Chen, X.; Zhu, J.; Yu, Q.; Liao, Y.; Liu, Y. Design and Test of Crawler Self-propelled Rotary Tillage Strawberry Ridging Fertilizer Compounding Machine. J. Chin. Agric. Mech. 2022, 43, 55–60, 85. [Google Scholar] [CrossRef]
- Zheng, K.; Li, Y.; Xia, J.; Liu, G.; Cheng, J.; Kang, Q. Design and Experiment of Axial Soil Levelling Cutter Roller with Gradual Spiral Lifting Angle for Furrow Rotiller. J. Agric. Mach. 2021, 52, 63–73. [Google Scholar]
- Dai, F.; Zhang, S.; Song, X.; Zhao, W.; Ma, H.; Zhang, F. Design and Experiment of a Combined Plastic-film Mulching Machine on Double Ridges and Double Width. J. Agric. Mach. 2020, 51, 108–117. [Google Scholar]
- JB/T 10291-2013; Dry Land Planting Machinery. Ministry of Industry and Information Technology of the People’s Republic of China: Beijing, China, 2013.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Process | Picture | Requirements |
|---|---|---|---|
| 1 | Seedbed preparation |  | The seedbed is tilted 10° to 20° |
| 2 | Setting seedlings |  | The heads of the seedlings are aligned and the spacing is 40~60 mm |
| 3 | Covering the seedlings with soil (burying the seedlings) |  | The thickness of covering soil is 40~80 mm, and the soil should be scattered evenly |
| 4 | Mulching |  | The distance between film edge and head of the seedlings is 0~40 mm |
| 5 | Covering the membrane edge and seedlings with soil |  | The operation process must ensure full coverage of the soil at the membrane edge and over the seedlings |
| Parameters | Numerical Values |
|---|---|
| Machine dimensions (length × width × height)/(mm × mm × mm) | 2297 × 2107 × 1655 |
| Auxiliary power/kw | 44.1 |
| Overall quality/kg | 512 |
| Seedling placement method | Manual seedling placement |
| Seedling outcrop distance/mm | 0~40 |
| Plant spacing/mm | 44 |
| Field capacity/(hm2·h−1) | 0.45~0.65 |
| Number of seeding rows | 4 |
| Angle of inclined planting/° | 15 |
| Covering thickness of seedlings/mm | 40~80 |
| Number of plastic films | 2 |
| The width of plastic film/mm | 620 |
| Suspension mode | Three-point suspension |
| Project | Parameters | Numerical Value |
|---|---|---|
| Soil particles, V-shaped seedbeds | Poisson’s | 0.4 |
| ratio shear modulus/Pa | 1.0 × 106 | |
| Density/(kg.m−3) | 1364 | |
| Rotary tillage knife | Poisson’s | 0.28 |
| ratio shear modulus/Pa | 3.5 × 1010 | |
| Density/(kg.m−3) | 7850 | |
| Soil particles–soil particles, seedbeds | Coefficient of recovery | 0.21 |
| Coefficient of static friction | 0.68 | |
| Coefficient of dynamic friction | 0.27 | |
| Soil particles–rotary tillage knife | Coefficient of recovery | 0.54 |
| Coefficient of static friction | 0.68 | |
| Coefficient of dynamic friction | 0.13 |
| Number | Forward Speed (m/s) | Average Seedling Spacing/cm | Standard Deviation/cm | Coefficient of Variation/% |
|---|---|---|---|---|
| 1 | 0.10 | 4.54 | 0.40 | 0.09 |
| 2 | 0.10 | 4.57 | 0.41 | 0.09 |
| 3 | 0.10 | 4.56 | 0.31 | 0.07 |
| 4 | 0.15 | 4.85 | 0.88 | 0.18 |
| 5 | 0.15 | 4.91 | 0.86 | 0.17 |
| 6 | 0.15 | 4.84 | 1.02 | 0.21 |
| 7 | 0.20 | 4.90 | 1.73 | 0.35 |
| 8 | 0.20 | 4.80 | 2.16 | 0.45 |
| 9 | 0.20 | 4.65 | 1.89 | 0.41 |
| Number | Forward Speed (m/s) | Number of Plants | Number of Qualified Plants for Planting Depth | Number of Qualified Plants for Planting Posture | Number of Qualified Plants for Membrane Side Outcrop | Qualified Rate of Planting Depth/% | Qualified Rate of Planting Posture/% | Qualified Rate of Film Side Outcrop/% |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.1 | 40 | 38 | 36 | 36 | 95.00 | 90.00 | 90.00 |
| 2 | 0.1 | 40 | 38 | 39 | 38 | 95.00 | 97.50 | 95.00 |
| 3 | 0.1 | 40 | 39 | 38 | 38 | 97.50 | 95.00 | 95.00 |
| 4 | 0.15 | 40 | 37 | 37 | 36 | 92.50 | 92.50 | 90.00 |
| 5 | 0.15 | 40 | 38 | 35 | 35 | 95.00 | 87.50 | 87.50 |
| 6 | 0.15 | 40 | 36 | 35 | 35 | 90.00 | 87.50 | 87.50 |
| 7 | 0.2 | 40 | 36 | 35 | 32 | 90.00 | 87.50 | 80.00 |
| 8 | 0.2 | 40 | 36 | 34 | 35 | 90.00 | 85.00 | 87.50 |
| 9 | 0.2 | 40 | 37 | 32 | 34 | 92.50 | 80.00 | 85.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, B.; Sun, W.; Zhao, Z.; Wang, H.; Zhang, L.; Zhang, H.; Li, H.; Liu, X.; Liu, P. Design and Experiment of the Combined Machine for Transplanting Outcrop of Codonopsis with Micro Ridge Covered with Film. Appl. Sci. 2023, 13, 9149. https://doi.org/10.3390/app13169149
Shi B, Sun W, Zhao Z, Wang H, Zhang L, Zhang H, Li H, Liu X, Liu P. Design and Experiment of the Combined Machine for Transplanting Outcrop of Codonopsis with Micro Ridge Covered with Film. Applied Sciences. 2023; 13(16):9149. https://doi.org/10.3390/app13169149
Chicago/Turabian StyleShi, Binghong, Wei Sun, Zhiwei Zhao, Hucun Wang, Luhai Zhang, Hua Zhang, Hui Li, Xiaolong Liu, and Pengxia Liu. 2023. "Design and Experiment of the Combined Machine for Transplanting Outcrop of Codonopsis with Micro Ridge Covered with Film" Applied Sciences 13, no. 16: 9149. https://doi.org/10.3390/app13169149
APA StyleShi, B., Sun, W., Zhao, Z., Wang, H., Zhang, L., Zhang, H., Li, H., Liu, X., & Liu, P. (2023). Design and Experiment of the Combined Machine for Transplanting Outcrop of Codonopsis with Micro Ridge Covered with Film. Applied Sciences, 13(16), 9149. https://doi.org/10.3390/app13169149