


A Distributed Intelligent Lighting Control System Based on Deep Reinforcement Learning


Abstract
1. Introduction
- First, a fully distributed intelligent lighting system framework is proposed, and a set of general-purpose applications are developed on the distributed framework to achieve plug-and-play and flexible expansion.
- Second, a shading system is developed that adaptively adjusts the amount of natural light radiation based on room temperature and brightness using fuzzy control logic.
- Third, based on deep reinforcement learning, a lighting control method that comprehensively considers uniform illumination and natural light is proposed.
2. Proposed Methodologies
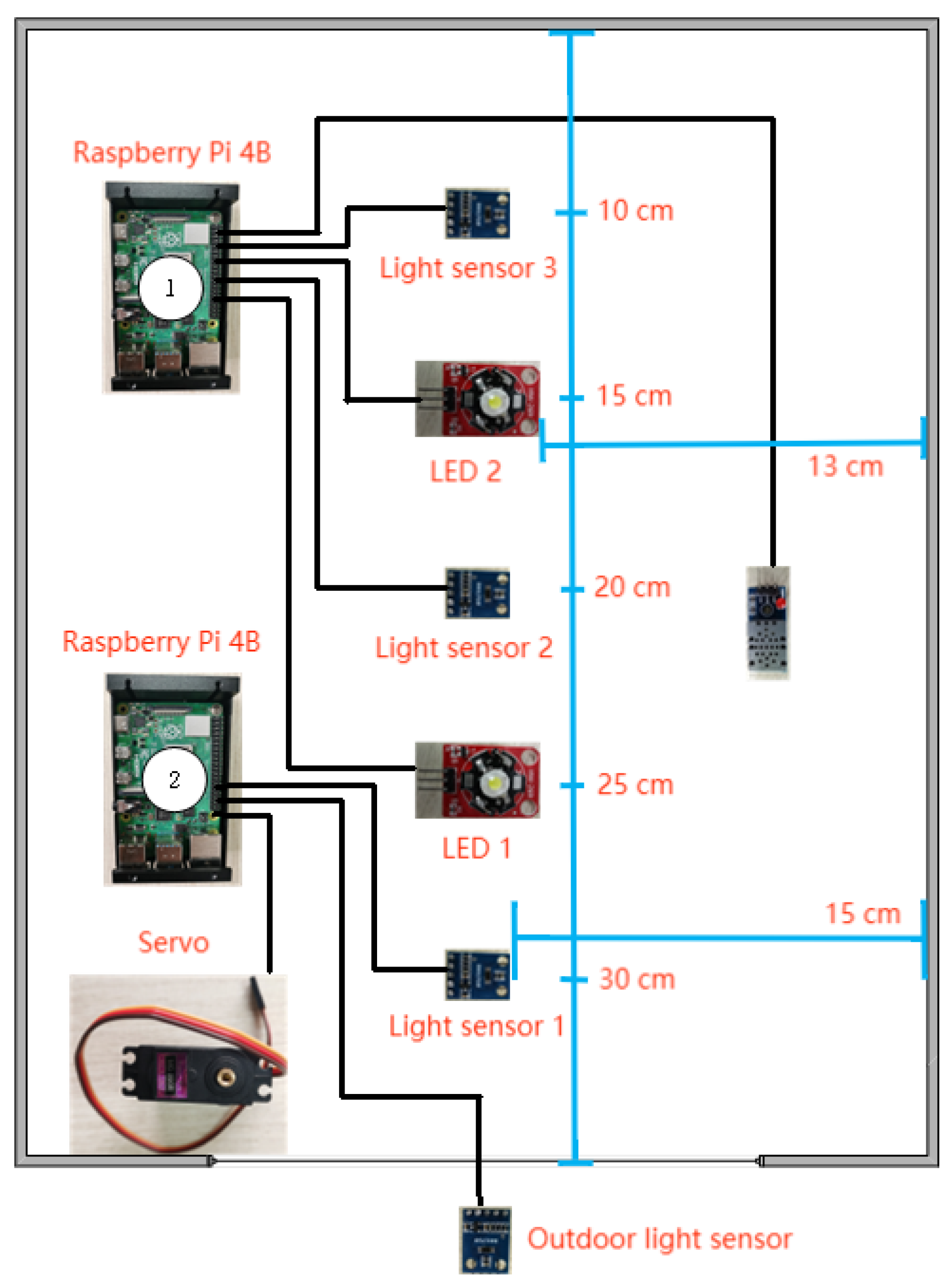
2.1. Designing of a Distributed Smart Lighting System Framework
2.2. Fuzzy Control for Shading Subsystem
- Its variables are in natural language rather than precise values; the control logic is simple to understand and simple to construct;
- The control chain of the fuzzy controller is based on rules derived from experience so that the system can maintain excellent control effects despite large external disturbances;
- Because its controller model is not a mathematical model and can be described with very little data, it does not require a large amount of training data.
2.3. Illumination Uniform Control Algorithm Based on DDPG
- Deep reinforcement learning algorithms are in real time, and unlike general heuristics, they can save the model after training and do not need to be recalculated for each adjustment;
- Having the ability to “store experience” and to learn from past experience;
- DDPG can handle high-dimensional and continuous action–state spaces to prevent “dimensional disasters”.
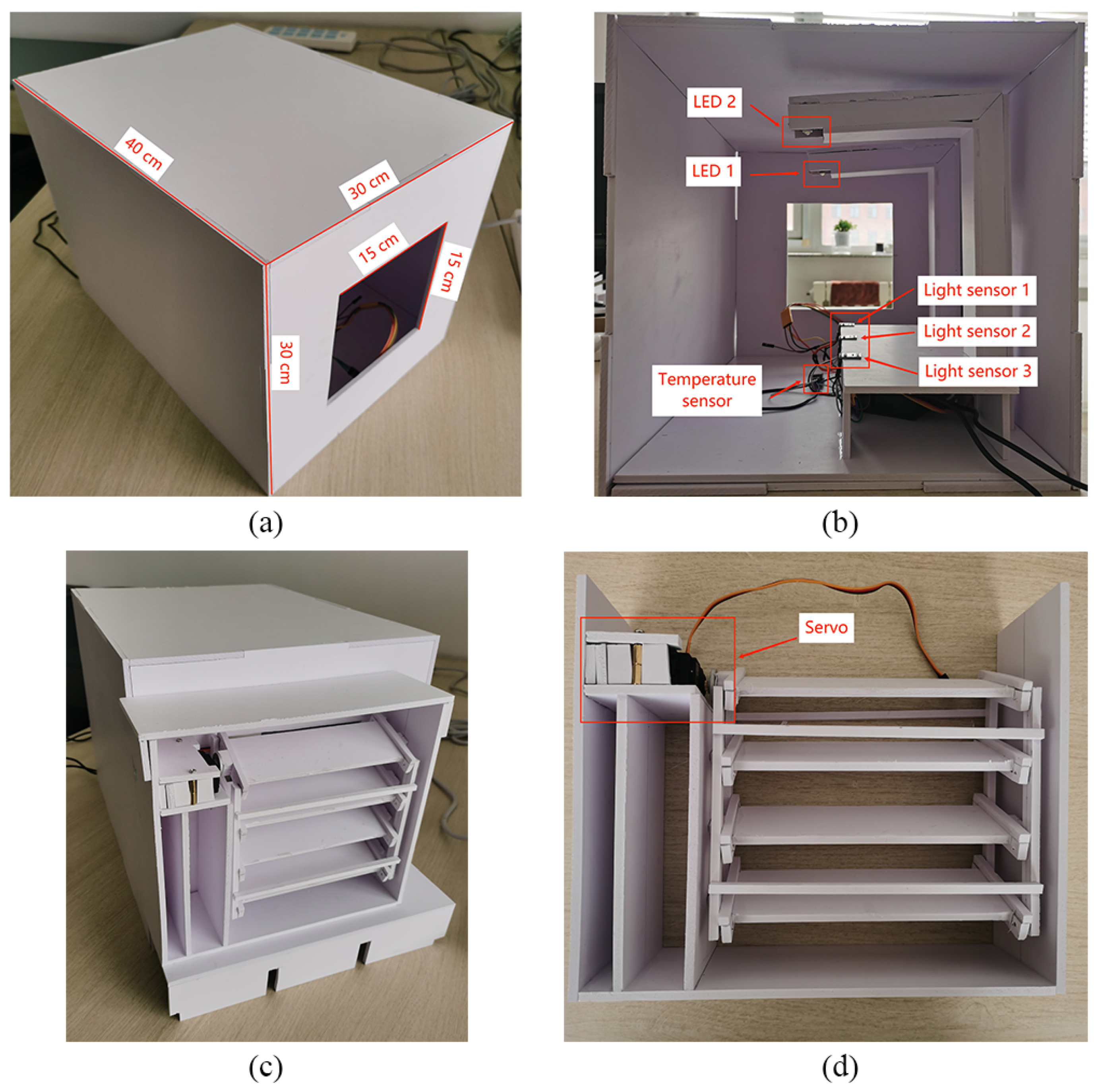
3. Prototype Development
3.1. Artificial Light Source Illumination Acquisition
- (i)
- Turning off all luminaires and measuring the illuminance values produced by natural light on each test point at this time;
- (ii)
- Turning off all luminaires and then turning on individual luminaires;
- (iii)
- Measuring illuminance values on each detection point;
- (iv)
- By iterating through all the luminaires in the area in the order of steps (ii) and (iii), the illuminance value produced by each luminaire containing the natural light illuminance value at each detection point can be obtained.
- (v)
- From Equation (1), the illuminance gain matrix is obtained by subtracting the corresponding data obtained in step (i) from the data obtained in steps (ii) and (iii).
3.2. Shading System Development
3.3. Lighting System Development
3.4. Integration Prototype
3.5. System Program Process
- (i)
- Node 1 measures the room temperature and then sends the temperature information to node 2 via synchronous communication;
- (ii)
- Node 2, after receiving information on the room temperature, measures the light level on the working surface near the window, followed by inputting the temperature and illumination information into the fuzzy controller;
- (iii)
- After obtaining the angle of the blinds from the fuzzy controller, the output angle of the blinds is optimized through Equation (9), and then Raspberry Pi (node 2) sends out the corresponding pulse wave through the pins to drive the servo to rotate the blinds and change the amount of natural light radiation, completing the first indoor illumination adjustment;
- (iv)
- Node 1 and node 2 measure the illuminance value of the working surface simultaneously; then, node 2 sends the illuminance information to node 1 via synchronous communication;
- (v)
- After receiving the illuminance information from node 2, node 1 applies Equation (5) to calculate the illuminance value generated by natural light at each measurement point based on the illuminance measured by the sensor and the information about the luminaire turn-on level;
- (vi)
- The natural illuminance value at each measurement point is used as input to obtain the optimum opening of the luminaire by means of the DDPG algorithm;
- (vii)
- The LED is then controlled by the PWM wave output from the corresponding pin of Raspberry Pi (node 1), thus achieving a second adjustment of the room illumination.
3.6. WEB-Based Applications
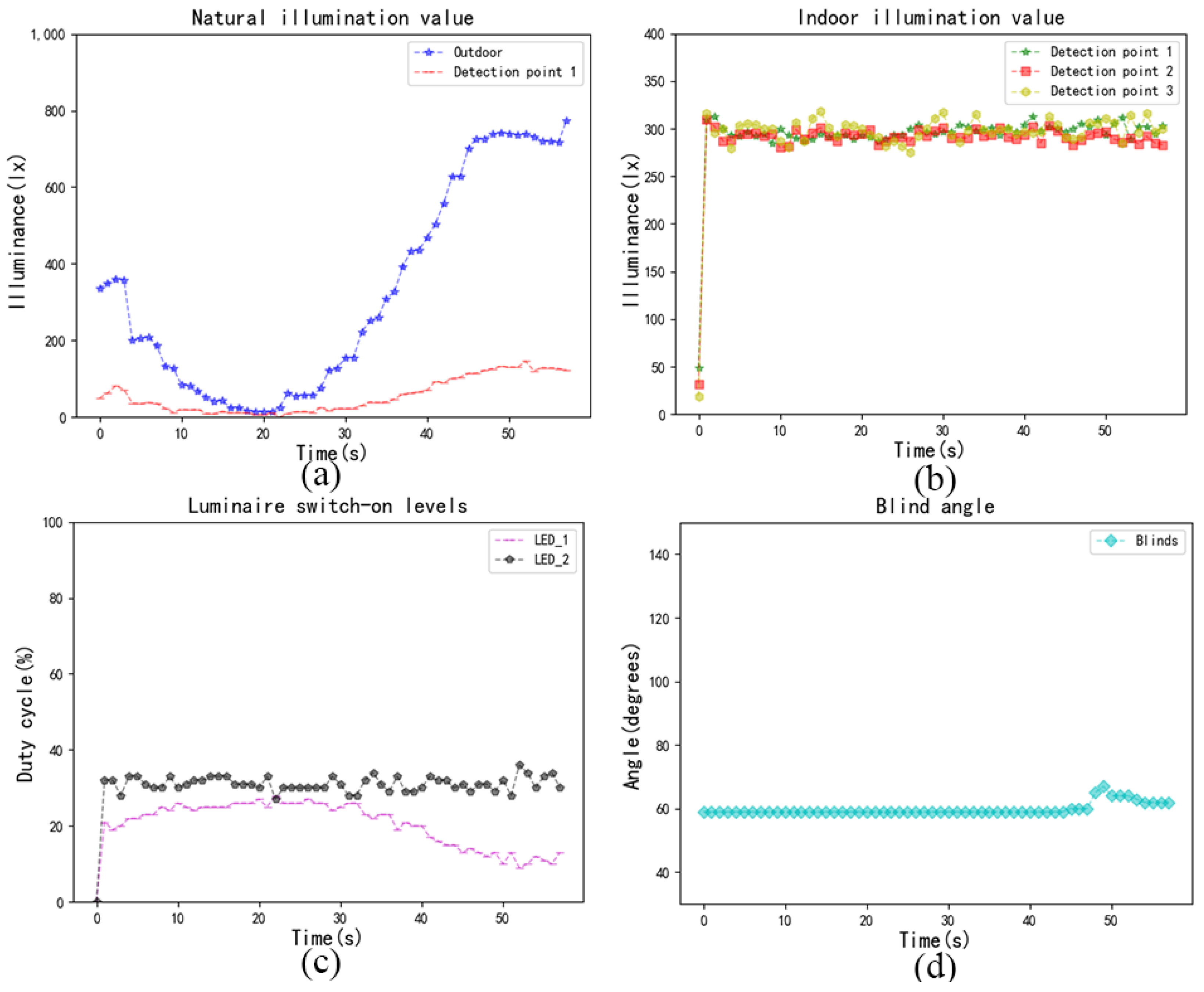
4. Results and Discussion
4.1. Intense Natural Light Testing
4.2. Weak Natural Light Testing
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ding, Y.; Fan, L.; Liu, X. Analysis of feature matrix in machine learning algorithms to predict energy consumption of public buildings. Energy Build. 2021, 249, 111208. [Google Scholar] [CrossRef]
- Moadab, N.H.; Olsson, T.; Fischl, G.; Aries, M. Smart versus conventional lighting in apartments-Electric lighting energy consumption simulation for three different households. Energy Build. 2021, 244, 111009. [Google Scholar] [CrossRef]
- Pandharipande, A.; Caicedo, D. Smart indoor lighting systems with luminaire-based sensing: A review of lighting control approaches. Energy Build. 2015, 104, 369–377. [Google Scholar] [CrossRef]
- Cho, Y.; Seo, J.; Lee, H.; Choi, S.; Choi, A.; Sung, M.; Hur, Y. Platform design for lifelog-based smart lighting control. Build. Environ. 2020, 185, 107267. [Google Scholar] [CrossRef]
- Hu, R.; Luo, X.; Zheng, H.; Qin, Z.; Gan, Z.; Wu, B.; Liu, S. Design of a novel freeform lens for LED uniform illumination and conformal phosphor coating. Opt. Express 2012, 20, 13727–13737. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Wang, K.; Wu, D.; Qin, Z.; Chen, F.; Luo, X.; Liu, S. New reversing design method for LED uniform illumination. Opt. Express 2011, 19, A830–A840. [Google Scholar] [CrossRef]
- Lee, T.X.; Chen, B.S. High uniformity and tolerance design for direct-lit LED backlight illumination using Lagrange interpolation. J. Disp. Technol. 2016, 12, 1403–1410. [Google Scholar] [CrossRef]
- Liao, H.; Sheng, X.; Yang, D. Design of adaptive lighting system based on fuzzy PID. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1543–1547. [Google Scholar]
- Saravanan, R. Fuzzy controller design of lighting control system by using VI package. IAES Int. J. Artif. Intell. 2012, 1, 73. [Google Scholar] [CrossRef]
- Altun, S.N.; Dörterler, M.; Dogru, I.A. Fuzzy logic based lighting system supported with IoT for renewable energy resources. In Proceedings of the 2018 Innovations in Intelligent Systems and Applications Conference (ASYU), Adana, Turkey, 4–6 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Seyedolhosseini, A.; Masoumi, N.; Modarressi, M.; Karimian, N. Daylight adaptive smart indoor lighting control method using artificial neural networks. J. Build. Eng. 2020, 29, 101141. [Google Scholar] [CrossRef]
- Garces-Jimenez, A.; Castillo-Sequera, J.L.; Del Corte-Valiente, A.; Gómez-Pulido, J.M.; González-Seco, E.P.D. Analysis of artificial neural network architectures for modeling smart lighting systems for energy savings. IEEE Access 2019, 7, 119881–119891. [Google Scholar] [CrossRef]
- Faria, P.; Pinto, Â.; Vale, Z.; Khorram, M.; de Lima Neto, F.B.; Pinto, T. Lighting consumption optimization using fish school search algorithm. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Vozmilov, A.G.; Shirobokova, T.A.; Astafev, D.V. Algorithm and software for calculating the design parameters of led lighting device. In Proceedings of the 2020 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 18–22 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Wang, Y.; Dasgupta, P. Designing an adaptive lighting control system for smart buildings and homes. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 450–455. [Google Scholar]
- Al-Masrani, S.M.; Al-Obaidi, K.M.; Sung, M.; Hur, Y. Dynamic shading systems: A review of design parameters, platforms and evaluation strategies. Autom. Constr. 2019, 102, 195–216. [Google Scholar] [CrossRef]
- Hu, T.Y.; Chen, C.K.; Lin, F.Y.; Lin, T.H. Influence of Roller Blinds Shading Strategy on West and South Facing Buildings. Energies 2023, 16, 711. [Google Scholar] [CrossRef]
- Al-Masrani, S.M.; Al-Obaidi, K.M.; Zalin, N.A.; Isma, M.A. Design optimisation of solar shading systems for tropical office buildings: Challenges and future trends. Sol. Energy 2018, 170, 849–872. [Google Scholar] [CrossRef]
- Adriaenssens, S.; Block, P.; Veenendaal, D.; Williams, C. (Eds.) Shell Structures for Architecture: Form Finding and Optimization; Routledge: Abingdon, UK, 2014. [Google Scholar]
- Al-Obaidi, K.M.; Ismail, M.A. Effective use of hybrid turbine ventilator to improve thermal performance in Malaysian tropical houses. Build. Serv. Eng. Res. Technol. 2016, 37, 755–768. [Google Scholar] [CrossRef]
- Ding, X.; Du, W.; Cerpa, A. OCTOPUS: Deep reinforcement learning for holistic smart building control. In Proceedings of the 6th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, New York, NY, USA, 13–14 November 2019; pp. 326–335. [Google Scholar]
- Baghoolizadeh, M.; Rostamzadeh-Renani, M.; Rostamzadeh-Renani, R.; Toghraie, D. Multi-objective optimization of Venetian blinds in office buildings to reduce electricity consumption and improve visual and thermal comfort by NSGA-II. Energy Build. 2023, 278, 112639. [Google Scholar] [CrossRef]
- Shen, H.; Tzempelikos, A. Daylight-linked synchronized shading operation using simplified model-based control. Energy Build. 2017, 145, 200–212. [Google Scholar] [CrossRef]
- Do, C.T.; Chan, Y.C.; Phuong, N.T.K. Selection of spatial sensitivity curve and installation location of photosensors for daylight-linked control systems in space with dynamic shading devices. Build. Environ. 2023, 230, 109984. [Google Scholar] [CrossRef]
- Xu, L.; Pan, Y.; Yao, Y.; Cai, D.; Huang, Z.; Linder, N. Lighting energy efficiency in offices under different control strategies. Energy Build. 2017, 138, 127–139. [Google Scholar] [CrossRef]
- Kunwar, N.; Cetin, K.S.; Passe, U.; Zhou, X.; Li, Y. Energy savings and daylighting evaluation of dynamic venetian blinds and lighting through full-scale experimental testing. Energy 2020, 197, 117190. [Google Scholar] [CrossRef]
- Scorpio, M.; Ciampi, G.; Gentile, N.; Sibilio, S. Effectiveness of low-cost non-invasive solutions for daylight and electric lighting integration to improve energy efficiency in historical buildings. Energy Build. 2022, 270, 112281. [Google Scholar] [CrossRef]
- Baidowi, Z.M.P.A.; Ruslee, A.Z.M.; Noh, N.M. A Room Light Controlling System Based on Curtain and Occupants’ Motion: A Conceptual Study. In Proceedings of the 2022 International Visualization, Informatics and Technology Conference, Kuala Lumpur, Malaysia, 1–2 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 288–292. [Google Scholar]
- Lee, C.T.; Chen, L.B.; Chu, H.M.; Hsieh, C.J.; Liang, W.C. An internet of things (IoT)-based master-slave regionalized intelligent LED-light-controlling system. Appl. Sci. 2022, 12, 420. [Google Scholar] [CrossRef]
- Chiesa, G.; Di Vita, D.; Ghadirzadeh, A.; Herrera, A.H.M.; Rodriguez, J.C.L. A fuzzy-logic IoT lighting and shading control system for smart buildings. Autom. Constr. 2020, 120, 103397. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Li, X.; Yang, Y.; Xiao, J.; Xu, B. Design of office intelligent lighting system based on Arduino. Procedia Comput. Sci. 2020, 166, 134–138. [Google Scholar] [CrossRef]
- O’Grady, T.; Chong, H.Y.; Morrison, G.M. A systematic review and meta-analysis of building automation systems. Build. Environ. 2021, 195, 107770. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of things: A survey on enabling technologies, protocols, and applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Minoli, D.; Sohraby, K.; Occhiogrosso, B. IoT considerations, requirements, and architectures for smart buildings—Energy optimization and next-generation building management systems. IEEE Internet Things J. 2017, 4, 269–283. [Google Scholar] [CrossRef]
- Xing, T.; Yan, H.; Sun, K.; Wang, Y.; Wang, X.; Zhao, Q. Honeycomb: An open-source distributed system for smart buildings. Patterns 2022, 3, 100605. [Google Scholar] [CrossRef]
- Torres-Salinas, H.; Rodríguez-Reséndiz, J.; Cruz-Miguel, E.E.; Ángeles-Hurtado, L.A. Fuzzy logic and genetic-based algorithm for a servo control system. Micromachines 2022, 13, 586. [Google Scholar] [CrossRef]
- Kaczorek, M.; Jacyna, M. Fuzzy logic as a decision-making support tool in planning transport development. Arch. Transp. 2022, 61, 51–70. [Google Scholar] [CrossRef]
- Geng, Y.; Ji, W.; Lin, B.; Zhu, Y. The impact of thermal environment on occupant IEQ perception and productivity. Build. Environ. 2017, 121, 158–167. [Google Scholar] [CrossRef]
- Zhang, F.; de Dear, R. University students’ cognitive performance under temperature cycles induced by direct load control events. Indoor Air 2017, 27, 78–93. [Google Scholar] [CrossRef] [PubMed]
- Wolkoff, P.; Azuma, K.; Carrer, P. Health, work performance, and risk of infection in office-like environments: The role of indoor temperature, air humidity, and ventilation. Int. J. Hyg. Environ. Health 2021, 233, 113709. [Google Scholar] [CrossRef] [PubMed]
- Yeganeh, A.J.; Reichard, G.; McCoy, A.P.; Bulbul, T.; Jazizadeh, F. Correlation of ambient air temperature and cognitive performance: A systematic review and meta-analysis. Build. Environ. 2018, 143, 701–716. [Google Scholar] [CrossRef]
- Kralikova, R.; Wessely, E. Lighting quality, productvity and human health. In Proceedings of the 27th DAAAM International Symposium, Vienna, Austria, 26–29 October 2016; Volume 27. [Google Scholar]
- Boscarino, G.; Moallem, M. Daylighting control and simulation for LED-based energy-efficient lighting systems. IEEE Trans. Ind. Inform. 2015, 12, 301–309. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Symbol | Range [°C] |
|---|---|---|
| Very cold | Vc | 17:17:19 |
| Cold | Cd | 17:19:21 |
| Cool | Cl | 19:21:23 |
| Mild | M | 21:23:25 |
| Warm | W | 23:25:27 |
| Hot | H | 25:27:29 |
| Very hot | Vh | 27:29:29 |
| Categories | Symbol | Range [lx] |
|---|---|---|
| Very Poor | Vp | 0:0:250 |
| Poor | P | 0:250:500 |
| Mediocre | M | 250:500:750 |
| Average | A | 500:750:1000 |
| Decent | D | 750:1000:1250 |
| Good | G | 1000:1250:1500 |
| Very Good | Vg | 1250:1500:1500 |
| Categories | Symbol | Range [degrees] |
|---|---|---|
| Extremely small | Es | 30:30:50 |
| Very small | Vs | 30:50:70 |
| Small | S | 50:70:90 |
| Medium | M | 70:90:110 |
| Large | L | 90:110:130 |
| Very large | Vl | 110:130:150 |
| Extremely large | El | 130:150:150 |
| Angle | Illuminance | |||||||
|---|---|---|---|---|---|---|---|---|
| Vp | P | M | A | D | G | Vg | ||
| Temperature | Vc | El | El | Vl | Vl | L | L | M |
| Cd | Vl | Vl | Vl | L | L | M | M | |
| Cl | Vl | L | L | L | M | M | S | |
| M | L | L | M | M | M | S | S | |
| W | L | M | M | S | S | S | Vs | |
| H | M | M | S | S | Vs | Vs | Vs | |
| Vh | M | S | S | Vs | Vs | Es | Es | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, P.; Wang, M.; Li, J.; Zhao, Q.; Zheng, X.; Gao, H. A Distributed Intelligent Lighting Control System Based on Deep Reinforcement Learning. Appl. Sci. 2023, 13, 9057. https://doi.org/10.3390/app13169057
Fang P, Wang M, Li J, Zhao Q, Zheng X, Gao H. A Distributed Intelligent Lighting Control System Based on Deep Reinforcement Learning. Applied Sciences. 2023; 13(16):9057. https://doi.org/10.3390/app13169057
Chicago/Turabian StyleFang, Peixin, Ming Wang, Jingzheng Li, Qianchuan Zhao, Xuehan Zheng, and He Gao. 2023. "A Distributed Intelligent Lighting Control System Based on Deep Reinforcement Learning" Applied Sciences 13, no. 16: 9057. https://doi.org/10.3390/app13169057
APA StyleFang, P., Wang, M., Li, J., Zhao, Q., Zheng, X., & Gao, H. (2023). A Distributed Intelligent Lighting Control System Based on Deep Reinforcement Learning. Applied Sciences, 13(16), 9057. https://doi.org/10.3390/app13169057