
Off-Axis Three-Mirror Optical System Designs: From Cooke’s Triplet to Remote Sensing and Surveying Instruments



Abstract
Featured Application
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Off-Axis Optical Systems
2. Cooke Triplet
3. Reflective Triplet (RT)
4. Three Mirror Anastigmat (TMA)
5. RT or TMA Coupling a Beam Splitter
6. Offner Relay (OR)
7. Wide Angle Large Reflective Unobscured System (WALRUS)
8. Korsch Triplet
9. Comments on Optical Design, Fabrication, and Potential Applications
10. Summary
Acronyms
| 3M | three mirror |
| F/# | f-number |
| FOV | field of view |
| ODAOS | off-axis and decentered all-reflective optical systems |
| OR | Offner relay |
| RT | reflective triplet |
| TMA | three-mirror anastigmat |
| WALRUS | wide-angle large reflective unobscured system |
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
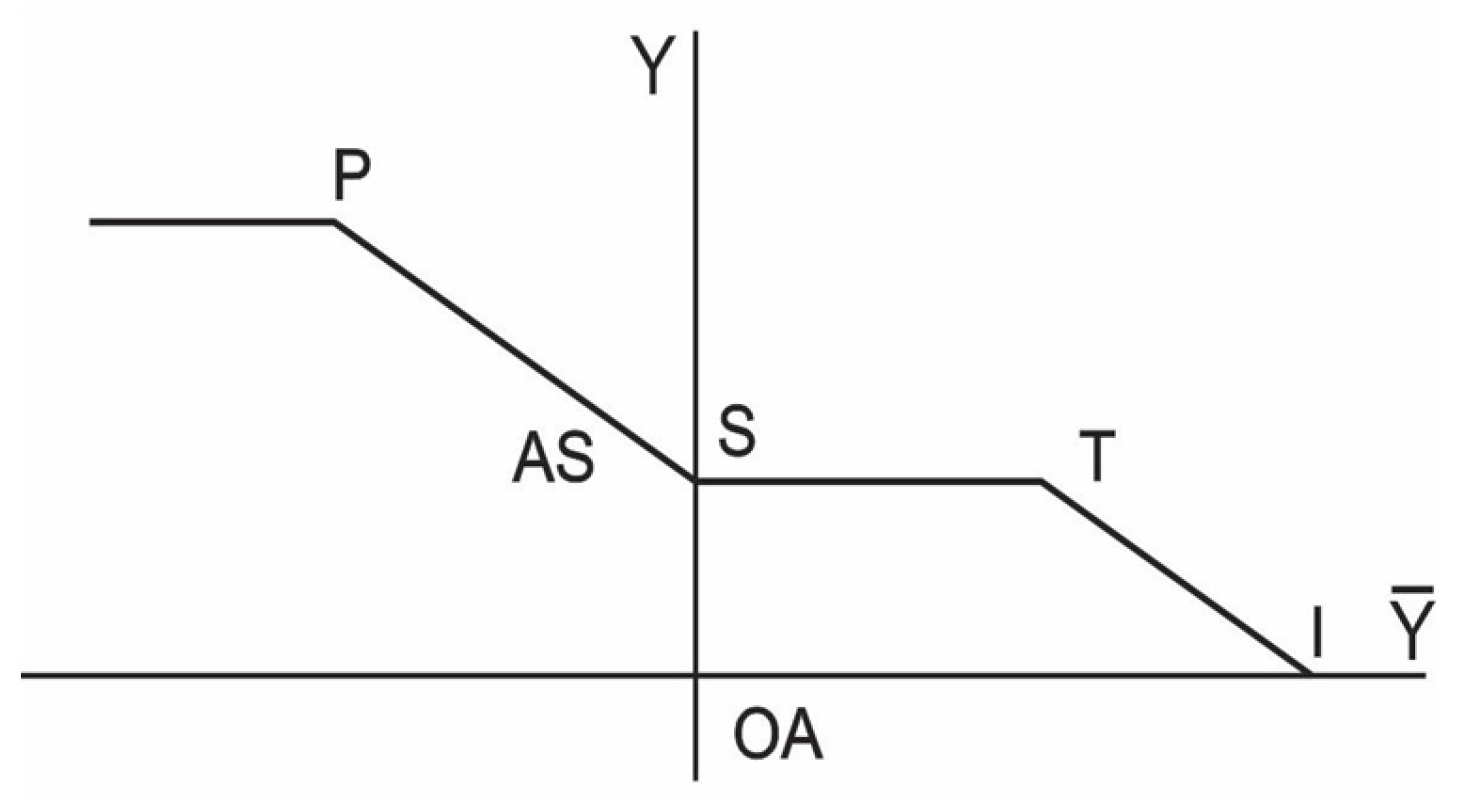
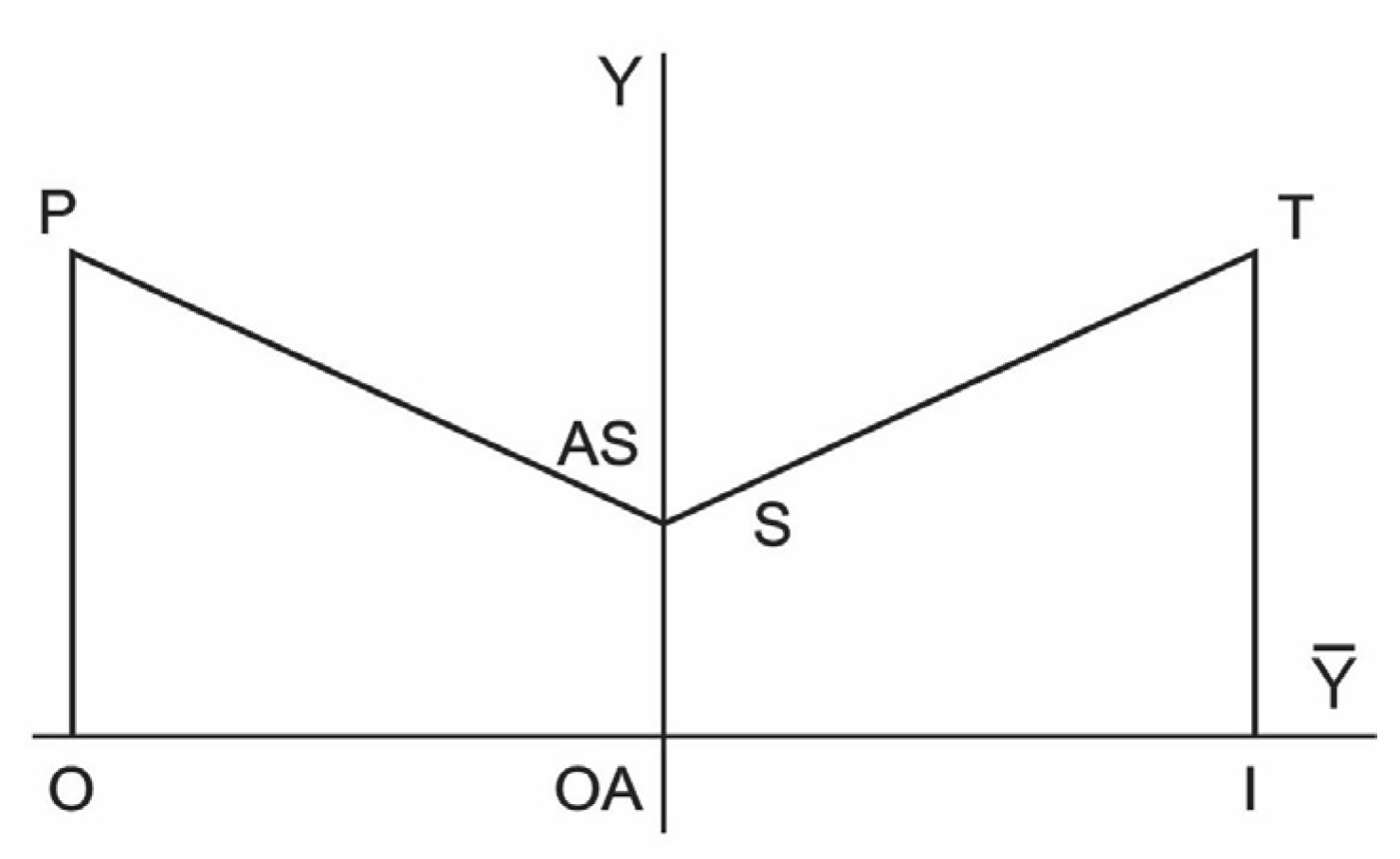
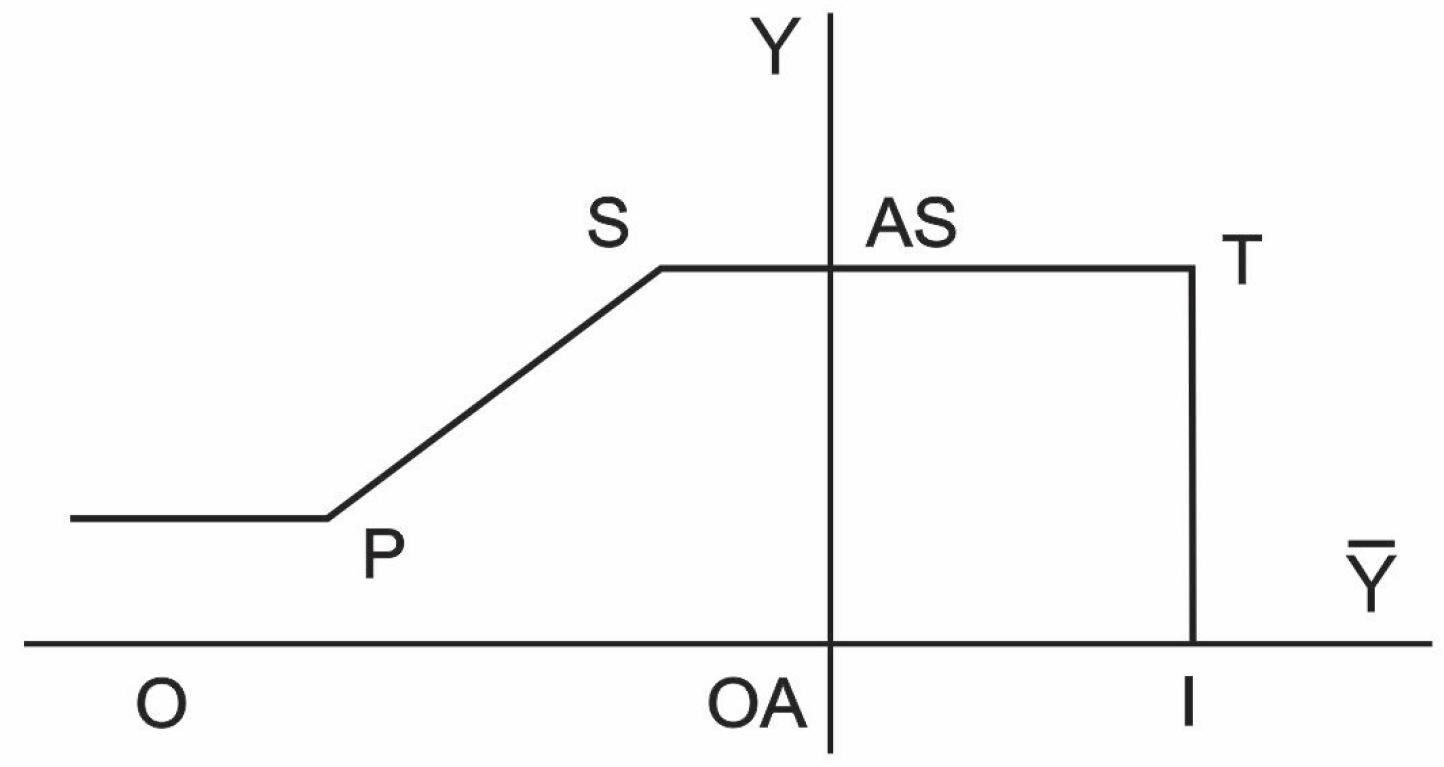
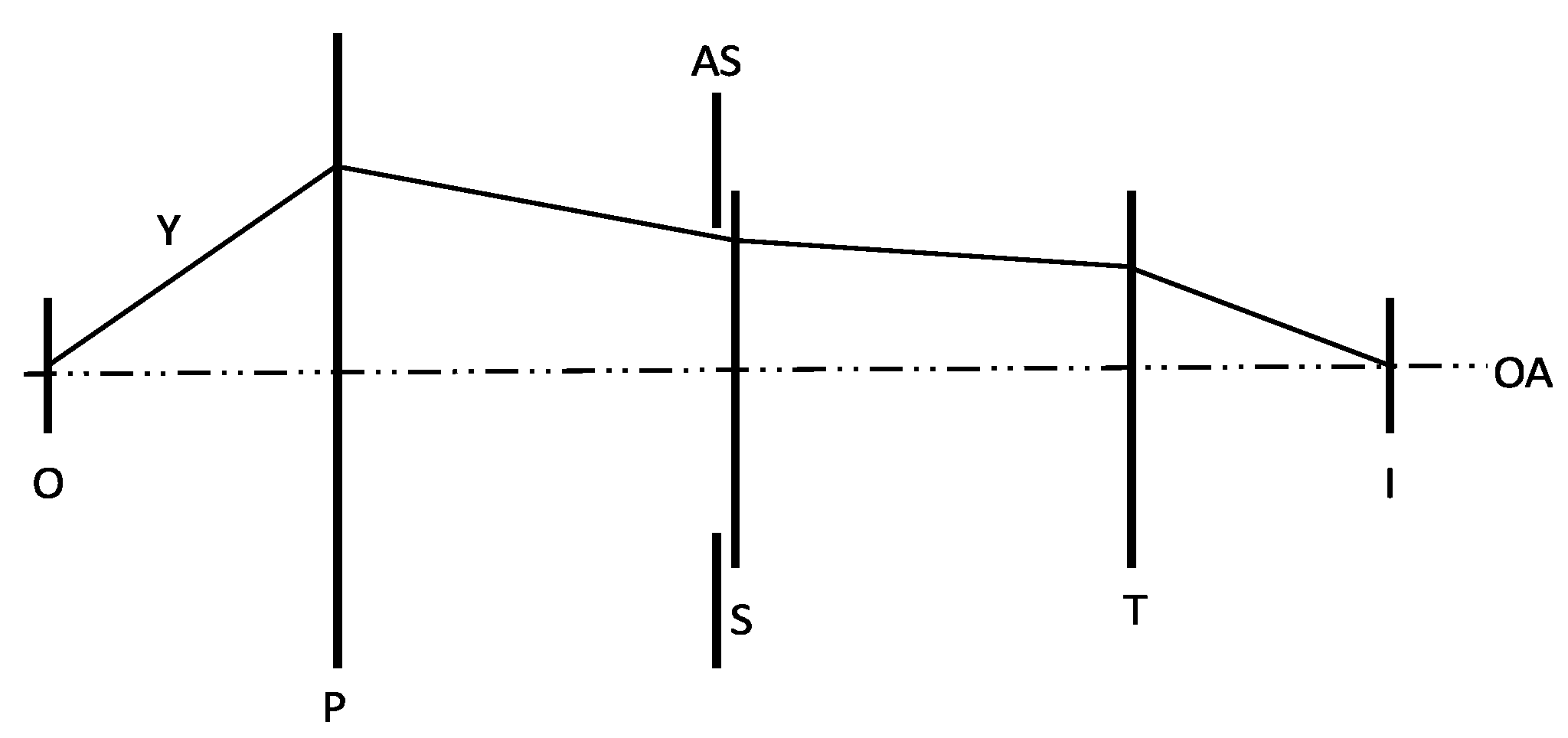
Appendix A. The Y-Ȳ Diagram



References
- Contreras, J.W.; Lightsey, P.A. Optical design and analysis of the James Webb Space Telescope: Optical telescope element. In Proceedings of the Novel Optical Systems Design and Optimization VII, Denver, CO, USA, 22 October 2004. [Google Scholar] [CrossRef]
- Marchi, A.Z.; Versluys, J.; Torralba, I.; Stockman, Y.; Kassel, R. PROBA V Multispectral Imager: Status. SPIE: Bellingham, WA, USA, 2017; p. 105640D. [Google Scholar] [CrossRef]
- Scholl, M.S. Stray light issues for background-limited far-infrared telescope operation. Opt. Eng. 1994, 33, 681–684. [Google Scholar] [CrossRef]
- Clermont, L.; Aballea, L. Stray light control and analysis for an off-axis three-mirror anastigmat telescope. Opt. Eng. 2021, 60, 055106. [Google Scholar] [CrossRef]
- Hopkins, R.E.; Hanau, R.; Osterberg, H.; Richards, O.W.; Kavanagh, A.J.; Wight, R.; Rosin, S.; Baumeister, P.; Bennett, A. Optical Design, mil-HDBK-141; Defense Supply Agency: Washington, DC, USA, 1962. [Google Scholar]
- Smith, W.J. Modern Lens Design; McGraw Hill: New York, NY, USA, 1992. [Google Scholar]
- Kingslake, R. Lens Fundamentals; Academic Press: New York, NY, USA, 1978. [Google Scholar]
- Welford, W.T. Aberrations of Optical Systems; Hilger: Bristol, UK, 1986. [Google Scholar]
- Laikin, M. Lens Design, 3rd ed.; Marcel Dekker: New York, NY, USA, 2001. [Google Scholar]
- Fischer, R.E.; Tadic-Galeb, B. Optical System Design; McGraw Hill: New York, NY, USA, 2000. [Google Scholar]
- Scholl, M.S. Design parameters for a two-mirror telescope for stray-light sensitive infrared applications. Inf. Phys. Technol. 1996, 37, 251–257. [Google Scholar] [CrossRef]
- Scholl, M.S. Recursive exact ray trace equations through the foci of the tilted off-axis confocal prolate spheroids. J. Mod. Opt. 1996, 43, 1583–1588. [Google Scholar] [CrossRef]
- Delano, E. First-order design and the y, y diagram. Appl. Opt. 1963, 2, 1251. [Google Scholar] [CrossRef]
- Lȏpez, F.J. The Application of the Delano Y-Y Diagram to Optical Design. Ph. D. Dissertation, University of Arizona, Tucson, AZ, USA, 1973. [Google Scholar]
- Zhang, K.-Y.; Yuan, X.-Y.; Cui, X.-Q. Automatic generation of optical initial configuration based on Delano diagram. Res. Astron. Astrophys. 2016, 16, 007. [Google Scholar] [CrossRef]
- Wilson, R.N. Reflecting Telescope Optics 1; Ch. 1, Historical Introduction; Springer: Berlin/Heidelberg, Germany, 1996; pp. 1–19. [Google Scholar]
- Wetherell, W.B.; Womble, D.A. All-Reflective Three Element Objective. U.S. Patent 4,240,707, 23 December 1980. [Google Scholar]
- Strojnik, M.; Bravo-Medina, B.; Martin, R.; Wang, Y. Ensquared energy and optical centroid efficiency in optical sensors: Part 1, Theory. Photonics 2023, 10, 254. [Google Scholar] [CrossRef]
- Moreno, I.; Strojnik, M. Dove prism with increased throughput for implementation in rotational shearing interferometer. Appl. Opt. 2003, 42, 4514–4521. [Google Scholar] [CrossRef] [PubMed]
- Scholl, M.S.; Wang, Y. Design of a high-resolution telescope for an imaging sensor to characterize a (Martian) landing-site. Opt. Eng. 1995, 34, 3222–3228. [Google Scholar] [CrossRef]
- Scholl, M.S. Push—Broom reconnaissance camera with time expansion for a (Martian) landing–site certification. Opt. Eng. 1997, 36, 566–573. [Google Scholar] [CrossRef]
- Williams, S.G.L. On-axis three-mirror anastigmat with an offset field of view. SPIE 1979, 183, 212. [Google Scholar]
- Cook, L.G. Three-Mirror Anastigmat Used Off-Axis in Aperture and Field. EP Patent 019447, 15 May 1980. [Google Scholar]
- Korsch, D. Anastigmatic three-mirror telescope. Appl. Opt. 1977, 16, 2074. [Google Scholar] [CrossRef] [PubMed]
- Noll, R.J. Reduction of diffraction of use of a Lyot stop. JOSA 1973, 63, 1399. [Google Scholar] [CrossRef]
- Wang, Y.; Vaughan, A.H. Simplified solution of diffraction from a Lyot system. Appl. Opt. 1988, 27, 27. [Google Scholar] [CrossRef] [PubMed]
- Scholl, M.S. Using the y, y-bar diagram to control stray light noise in IR systems. Inf. Phys. Technol. 1997, 38, 25–30. [Google Scholar] [CrossRef]
- Wang, Y. Dichroic Beam Splitter and Related Apparatus and Methods. U.S. Patent 7,616,378, 10 November 2009. [Google Scholar]
- Offner, A. New concepts in projection mask aligners. Opt. Eng. 1975, 14, 130. [Google Scholar] [CrossRef]
- Strojnik, M.; Kirk, M.S. Telescopes. In Fundamentals and Basic Optical Instruments; Malacara, D., Thompson, B., Eds.; CRC Press: New York, NY, USA, 2018; pp. 325–375. [Google Scholar]
- Hallam, K.L.; Howell, B.J.; Wilson, M.E. Wide-Angle Flat Field Telescope. U.S. Patent 4,598,981, 8 July 1986. [Google Scholar]
- Wang, Y. Compact, Folded Wide-Angle Large Reflective Unobscured Optical System. U.S. Patent 5,379,157, 3 January 1995. [Google Scholar]
- Korsch, D. Near-Anastigmatic Compact Collimator. U.S. Patent 4,632,521, 30 December 1986. [Google Scholar]
- Falaggis, K.; Rolland, J.; Duerr, F.; Sohn, A. Freeform optics: Introduction. Opt. Express 2022, 30, 6450. [Google Scholar] [CrossRef] [PubMed]
- Garrard, K.; Bruegge, T.; Hoffman, J.; Dow, T.; Sohn, A. Design tools for freeform optics. SPIE 2005, 5874, 58740A. [Google Scholar] [CrossRef]
- Johnson, T.P. Optical System Design and Distortion Control of Wide Field of View, All-Reflective Imagers. Ph.D. Dissertation, University of Arizona, Tucson, AZ, USA, 2019. [Google Scholar]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strojnik, M.; Bravo-Medina, B.; Beltran-Gonzalez, A.; Wang, Y. Off-Axis Three-Mirror Optical System Designs: From Cooke’s Triplet to Remote Sensing and Surveying Instruments. Appl. Sci. 2023, 13, 8866. https://doi.org/10.3390/app13158866
Strojnik M, Bravo-Medina B, Beltran-Gonzalez A, Wang Y. Off-Axis Three-Mirror Optical System Designs: From Cooke’s Triplet to Remote Sensing and Surveying Instruments. Applied Sciences. 2023; 13(15):8866. https://doi.org/10.3390/app13158866
Chicago/Turabian StyleStrojnik, Marija, Beethoven Bravo-Medina, Anuar Beltran-Gonzalez, and Yaujen Wang. 2023. "Off-Axis Three-Mirror Optical System Designs: From Cooke’s Triplet to Remote Sensing and Surveying Instruments" Applied Sciences 13, no. 15: 8866. https://doi.org/10.3390/app13158866
APA StyleStrojnik, M., Bravo-Medina, B., Beltran-Gonzalez, A., & Wang, Y. (2023). Off-Axis Three-Mirror Optical System Designs: From Cooke’s Triplet to Remote Sensing and Surveying Instruments. Applied Sciences, 13(15), 8866. https://doi.org/10.3390/app13158866