

Spectrum-Based Logistic Regression Modeling for the Sea Bottom Soil Categorization



Abstract
1. Introduction
2. Method
2.1. Experimental Setup
2.2. Data Extraction and Preparation
3. Datasets
3.1. Time Series Data
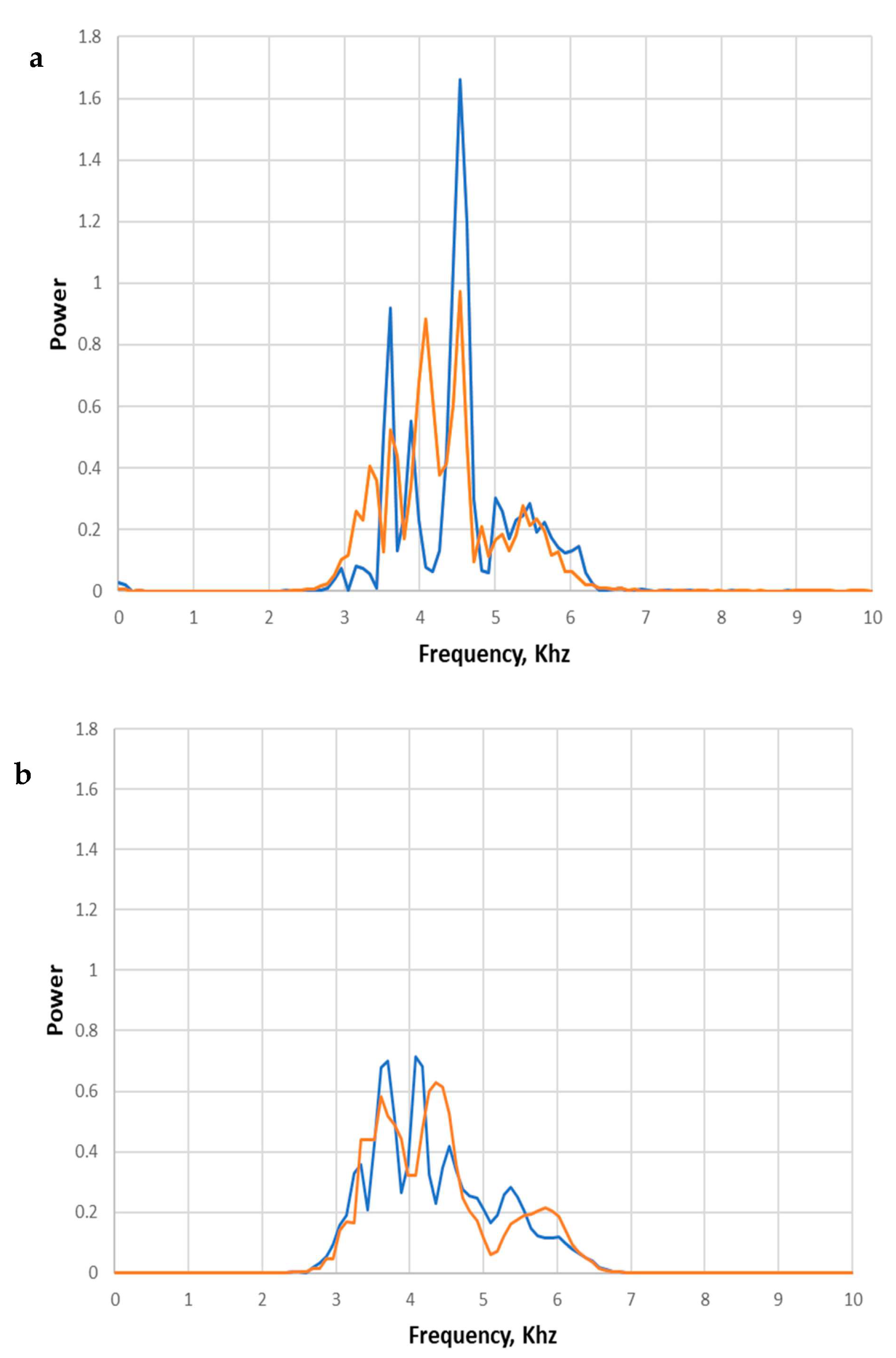
3.2. Spectral Data
- The time series were auto-correlated and transformed into the frequency domain using the discrete Fourier transform. This results in a two-sided power spectrum containing information on the frequency components of the signal;
- The positive frequency range was selected to obtain the one-sided power spectrum;
- The power values were multiplied by two (except for the first term) and normalized by the spectrum area. The normalization step is necessary to correct for differences in attenuation between sand and sandstone sites due to the depth differences;
- To ensure that the spectra data are clean and accurate, a noise reduction step was performed by applying a frequency bandwidth filter to match the transmitted signal’s frequency range of 2.75 kHz to 6.75 kHz. The resulting discrete spectra points were used as features in machine learning models to classify sand and sandstone sea bottoms.
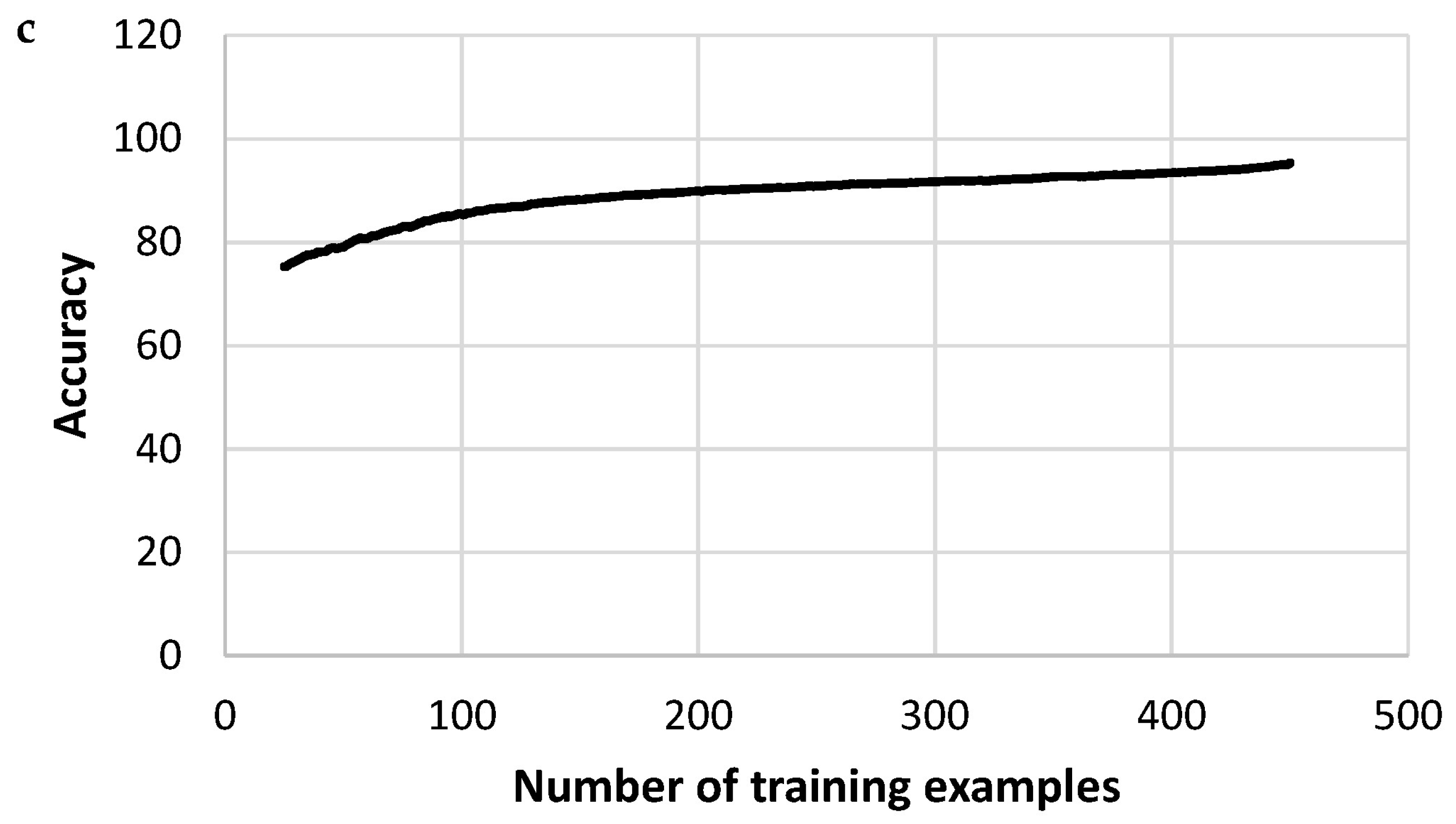
4. The Results of the Logistic Regression Model
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shtienberg, G.; Dix, J.; Waldmann, N.; Makovsky, Y.; Golan, A.; Sivan, D. Late-Pleistocene evolution of the continental shelf of central Israel, a case study from Hadera. Geomorphology 2016, 261, 200–211. [Google Scholar] [CrossRef]
- Pergent, G.; Monnier, B.; Clabaut, P.; Gascon, G.; Pergent-Martini, C.; Valette-Sansevin, A. Innovative method for optimizing Side-Scan Sonar mapping: The blind band unveiled. Estuar. Coast. Shelf Sci. 2017, 194, 77–83. [Google Scholar] [CrossRef]
- Boswarvaa, K.; Butters, A.; Foxa, C.J.; Howea, J.A.; Narayanaswamy, B. Improving marine habitat mapping using high-resolution acoustic data; a predictive habitat map for the Firth of Lorn, Scotland. Cont. Shelf Res. 2018, 168, 39–47. [Google Scholar] [CrossRef]
- Jaijela, R.; Kanari, M.; Glover, J.B.; Rissolo, D.; Beddows, P.A.; Ben-Avraham, Z.; Goodman-Tchernov, B.N. Shallow geophysical exploration at the ancient maritime Maya site of Vista Alegre, Yucatan Mexico. J. Archaeol. Sci. Rep. 2018, 19, 52–63. [Google Scholar] [CrossRef]
- Innangi, S.; Tonielli, R.; Romagnolo, C.; Budillon, F.; Di Martino, G.; Innangi, M.; Laterza, R.; Le Bas, T.; Lo Iacono, C. Seabed mapping in the Pelagie Islands marine protected area (Sicily Channel, southern Mediterranean) using Remote Sensing Object Based Image Analysis (RSOBIA). Mar. Geophys. Res. 2019, 40, 333–355. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Crocker, S.E.; Fratantonio, F.D.; Hart, P.E.; Foster, D.S.; O’Brien, T.F.; Labak, S. Measurement of Sounds Emitted by Certain High-Resolution Geophysical Survey Systems. IEEE J. Ocean. Eng. 2019, 44, 796–813. [Google Scholar] [CrossRef]
- Tayber, Z.; Meilijson, A.; Ben-Avraham, Z.; Makovsky, Y. Methane Hydrate Stability and Potential Resource in the Levant Basin, Southeastern Mediterranean Sea. Geosciences 2019, 9, 306. [Google Scholar] [CrossRef]
- Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. [Google Scholar] [CrossRef]
- Wu, Q.; Ding, X.; Zhang, Y.; Chen, Z. Comparative Study on Seismic Response of Pile Group Foundation in Coral Sand and Fujian Sand. J. Mar. Sci. Eng. 2020, 8, 189. [Google Scholar] [CrossRef]
- Liu, B.; Chang, S.; Zhang, S.; Li, Y.; Yang, Z.; Liu, Z.; Chen, Q. Seismic-Geological Integrated Study on Sedimentary Evolution and Peat Accumulation Regularity of the Shanxi Formation in Xinjing Mining Area, Qinshui Basin. Energies 2022, 15, 1851. [Google Scholar] [CrossRef]
- Modenesi, M.C.; Santamarina, J.C. Hydrothermal metalliferous sediments in the Red Sea deeps: Formation, characterization, and properties. Eng. Geol. 2022, 305, 106720. [Google Scholar] [CrossRef]
- Pace, N.G.; Gao, H. Swathe seabed classification. IEEE J. Ocean. Eng. 1988, 13, 83–90. [Google Scholar] [CrossRef]
- Tamsett, D. Sea-bed characterization and classification from the power spectra of side-scan sonar data. Mar. Geophys. Res. 1993, 15, 43–64. [Google Scholar] [CrossRef]
- Stevenson, I.R.; McCann, C.; Runciman, P.B. An attenuation-based sediment classification technique using Chirp sub-bottom profiler data and laboratory acoustic analysis. Mar. Geophys. Res. 2002, 23, 277–298. [Google Scholar] [CrossRef]
- Atallah, L.; Probert Smith, P.J.; Bates, C.R. Wavelet analysis of bathymetric side scan sonar data for the classification of seafloor sediments in Hopvågen Bay-Norway. Mar. Geophys. Res. 2002, 23, 431–442. [Google Scholar] [CrossRef]
- Kenny, A.J.; Cato, I.; Desprez, M.; Fader, G.; Schüttenhelm, R.T.E.; Side, J. An overview of seabed-mapping technologies in the context of marine habitat classification. ICES J. Mar. Sci. 2003, 60, 411–418. [Google Scholar] [CrossRef]
- Reed, S.; Petillot, Y.; Bell, Y. An automatic approach to the detection and extraction of mine features inside scan sonar. IEEE J. Ocean. Eng. 2003, 28, 90–105. [Google Scholar] [CrossRef]
- Szuman, M.; Berndt, C.; Jacobs, C.; Best, A. Seabed characterization through a range of high-resolution acoustic systems—A case study offshore Oman. Mar. Geophys. Res. 2006, 27, 167–180. [Google Scholar] [CrossRef]
- Satyanarayana, Y.; Naithani, S.; Anu, R. Seafloor sediment classification from single beam echo sounder data using LVQ network. Mar. Geophys. Res. 2007, 28, 95–99. [Google Scholar] [CrossRef]
- Tian, W.-M. Integrated method for the detection and location of underwater pipelines. Appl. Acoust. 2008, 69, 387–398. [Google Scholar] [CrossRef]
- Langner, F.; Knauer, C.; Ebert, A. Side scan sonar image resolution and automatic object detection, classification and identification. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Sun, Z.; Hu, J.; Zheng, Q.; Li, C. Strong near-inertial oscillations in geostrophic shear in the northern South China Sea. J. Oceanogr. 2011, 67, 377–384. [Google Scholar] [CrossRef]
- Nait-Chabane AZerr, B.; Le Chenadec, G. Side scan sonar imagery segmentation with a combination of texture and spectral analysis. In Proceedings of the OCEANS-Bergen, 2013 MTS/IEEE, Bergen, Norway, 10–14 June 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Satyanarayana, Y.; Nitheesh, T. Segmentation and classification of shallow sub-bottom acoustic data, using image processing and neural networks. Mar. Geophys. Res. 2014, 35, 149–156. [Google Scholar]
- Cho, H.; Gu, J.; Joe, H.; Asada, A.; Yu, S.-C. Acoustic beam profile-based rapid underwater object detection for an imaging sonar. J. Mar. Sci. Technol. 2015, 20, 180–197. [Google Scholar] [CrossRef]
- Picard, L.; Alexandre Baussard, A.; Le Chenadec, G.; Quidu, I. Seafloor characterization for ATR applications using the monogenic signal and the intrinsic dimensionality. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Divinsky, B.V.; Kosyan, R.D. Spectral structure of surface waves and its influence on sediment dynamics. Oceanologia 2019, 61, 89–102. [Google Scholar] [CrossRef]
- Tęgowski, J. Acoustical classification of the bottom sediments in the southern Baltic Sea. Quat. Int. 2005, 130, 153–161. [Google Scholar] [CrossRef]
- Fezzani, R.; Berger, L. Analysis of calibrated seafloor backscatter for habitat classification methodology and case study of 158 spots in the Bay of Biscay and Celtic Sea. Mar. Geophys. Res. 2018, 39, 169–181. [Google Scholar] [CrossRef]
- Evangelos, A.; Snellen, M.; Simons, D.; Siemes, K.; Greinert, J. Multi-angle backscatter classification and sub-bottom profiling for improved seafloor characterization. Mar. Geophys. Res. 2018, 39, 289–306. [Google Scholar]
- Huang, Z.; Siwabessy, J.; Cheng, H.; Nichol, S. Using multibeam backscatter data to investigate sediment-acoustic relationships. J. Geophys. Res. Ocean. 2018, 123, 4649–4665. [Google Scholar] [CrossRef]
- Fonseca, L.; Calder, B. Geocoder: An efficient Backscatter map constructor. In Proceedings of the U.S. Hydrographic Conference, San Diego, CA, USA, 29–31 March 2005. [Google Scholar]
- Anderson, J.T.; Holliday, D.V.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: Current practice and future directions. ICES J. Mar. Sci. 2008, 65, 1004–1011. [Google Scholar] [CrossRef]
- Chakraborty, B.; Kodagali, V.; Baracho, J. Sea-Floor Classification Using Multibeam Echo-Sounding Angular Backscatter floor classification Data: A Real-Time Approach Employing Hybrid Neural Network Architecture. IEEE J. Ocean. Eng. 2003, 28, 121–128. [Google Scholar] [CrossRef]
- Van Komen, D.F.; Neilsen, T.B.; Knobles, D.P.; Badiey, M. A feedforward neural network for source range and ocean seabed classification using time-domain features. Proc. Meet. Acoust. 2019, 36, 070003. [Google Scholar]
- Van Komen, D.F.; Neilsen, T.B.; Knobles, D.P. A convolutional neural network for source range and ocean seabed classification using pressure time-series. Proc. Meet. Acoust. 2019, 36, 070004. [Google Scholar]
- Van Komen, D.F.; Neilsen, T.B.; Howarth, K.; Knobles, D.P.; Dahl, P.H. Seabed and range estimation of impulsive time series using a convolutional neural network. J. Acoust. Soc. Am. 2020, 147, EL403–EL408. [Google Scholar] [CrossRef]
- Frederick, C.; Villar, S.; Michalopoulou, Z.-H. Seabed classification using physics-based modelling and machine learning. J. Acoust. Soc. Am. 2020, 148, 859–872. [Google Scholar] [CrossRef] [PubMed]
- Cui, X.; Liu, H.; Fang, M.; Ai, B.; Ma, D.; Yang, F. Seafloor habitat mapping using multibeam bathymetric and backscatter intensity multi-features SVM classification framework. Appl. Acoust. 2021, 174, 107728. [Google Scholar] [CrossRef]
- Cui, X.; Yang, F.; Wang, X.; Ai, B.; Luo, Y.; Ma, D. Deep learning model for seabed sediment classification based on fuzzy ranking feature optimization. Mar. Geol. 2021, 432, 106390. [Google Scholar] [CrossRef]
- Zhu, Z.; Cui, X.; Zhang, K.; Ai, B.; Shi, B.; Yang, F. DNN-based seabed classification using differently weighted MBES multi-features. Mar. Geol. 2021, 438, 106519. [Google Scholar] [CrossRef]
- Kushnir, U.; Frid, V. Spectral Acoustic Fingerprints of Sand and Sandstone Sea Bottoms. J. Mar. Sci. Eng. 2022, 10, 1923. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- Steinbuch, L.; Brus, D.J.; Heuvelink, G.B.M. Mapping the probability of ripened subsoils using Bayesian logistic regression with informative priors. Geoderma 2018, 316, 56–69. [Google Scholar] [CrossRef]
- Tynan, C.T.; Ainley, D.G.; Barth, J.A.; Cowles, T.J.; Pierce, S.D.; Spear, L.B. Cetacean distributions relative to ocean processes in the northern California Current System. Deep-Sea Res. II 2005, 52, 145–167. [Google Scholar] [CrossRef]
- Singh, S.; Rao, M.J.; Baranval, N.K.; Kumar, K.V.; Kumar, Y.V. Geoenvironment factors guided coastal urban growth prospect (UGP) delineation using heuristic and machine learning models. Ocean. Coast. Manag. 2023, 236, 106496. [Google Scholar] [CrossRef]
- Maxwell, D.L.; Stelzenmüller, V.; Eastwood, P.D.; Rogers, S.I. Modeling the spatial distribution of plaice (Pleuronectes platessa), sole (Solea solea) and thornback ray (Raja clavata) in UK waters for marine management and planning. J. Sea Res. 2009, 61, 258–267. [Google Scholar] [CrossRef]
- Zhang, T.; Yan, L.; Han, G.; Peng, Y. Fast and Accurate Underwater Acoustic Horizontal Ranging Algorithm for an Arbitrary Sound-Speed Profile in the Deep Sea. IEEE Internet Things J. 2022, 9, 755–769. [Google Scholar] [CrossRef]
- McCormack, B.; Borrelli, M. Shallow Water Object Detection, Classification, and Localization via Phase-Measured, Bathymetry-Mode Backscatter. Remote Sens. 2023, 15, 1685. [Google Scholar] [CrossRef]
- Raja, N.B.; Cicek, I.C.; Turkoglu, N.; Aydin, O.; Kawasaki, A. Landslide susceptibility mapping of the Sera River Basin using logistic regression model. Nat. Hazards 2017, 85, 1323–1346. [Google Scholar] [CrossRef]
- Yeasin, M.; Haldar, D.; Kumar, S.; Paul, R.K.; Ghosh, S. Machine Learning Techniques for Phenology Assessment of Sugarcane Using Conjunctive SAR and Optical Data. Remote Sens. 2022, 14, 3249. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site: | Site 1 | Site 2 | Site 3 | Site 4 |
|---|---|---|---|---|
| Soil type | Sand | Sand | Sandstone | Sandstone |
| Depth [m] | 26 | 26 | 33 | 33 |
| Transducer depth [m] | 1 | 1 | 1 | 1 |
| Transmission power [dB] | −18 | −18 | −18 | −18 |
| Water sound velocity [m/s] | 1530 | 1530 | 1530 | 1530 |
| Recorded signal duration [ms] | 100 | 100 | 100 | 100 |
| a | |||
|---|---|---|---|
| Actual | Predicted rock | Predicted sand | |
| Rock and Sand | 450 | 137 | 313 |
| Rock | 150 | 133 | 17 |
| Sand | 300 | 4 | 296 |
| b | |||
| Actual | Predicted rock | Predicted sand | |
| Rock and Sand | 150 | 55 | 95 |
| Rock | 50 | 48 | 2 |
| Sand | 100 | 7 | 93 |
| c | |||
| Actual | Predicted rock | Predicted sand | |
| Rock and Sand | 450 | 138 | 312 |
| Rock | 150 | 134 | 16 |
| Sand | 300 | 4 | 296 |
| d | |||
| Actual | Predicted rock | Predicted sand | |
| Rock and Sand | 150 | 39 | 111 |
| Rock | 50 | 37 | 13 |
| Sand | 100 | 2 | 98 |
| Relative training set size [dimensionless] | 1.64 | 2.05 | 2.45 | 2.86 | 3.27 | 3.68 | 4.09 |
| Maximal accuracy over the test set [%] | 67.33 | 74.67 | 84.67 | 84.67 | 84.67 | 89.33 | 94.00 |
| Maximal accuracy over the training set [%] | 87.67 | 96.00 | 95.56 | 96.83 | 96.11 | 95.06 | 95.33 |
| Number of iterations to achieve maximal accuracy over both sets [iterations] | 20 | 90 | 120 | 160 | 160 | 220 | 210 |
| Regularization parameter for maximal accuracy | 10 | 0 | 0 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kushnir, U.; Frid, V. Spectrum-Based Logistic Regression Modeling for the Sea Bottom Soil Categorization. Appl. Sci. 2023, 13, 8131. https://doi.org/10.3390/app13148131
Kushnir U, Frid V. Spectrum-Based Logistic Regression Modeling for the Sea Bottom Soil Categorization. Applied Sciences. 2023; 13(14):8131. https://doi.org/10.3390/app13148131
Chicago/Turabian StyleKushnir, Uri, and Vladimir Frid. 2023. "Spectrum-Based Logistic Regression Modeling for the Sea Bottom Soil Categorization" Applied Sciences 13, no. 14: 8131. https://doi.org/10.3390/app13148131
APA StyleKushnir, U., & Frid, V. (2023). Spectrum-Based Logistic Regression Modeling for the Sea Bottom Soil Categorization. Applied Sciences, 13(14), 8131. https://doi.org/10.3390/app13148131