
Design of Energy Recovery Control for General Virtual Synchronous Machines Based on Various Forms of Energy Storage


Abstract
Featured Application
Abstract
1. Introduction
1.1. History and State of the Art of ESS-Based VSM
1.2. Research Gap
1.3. Contributions
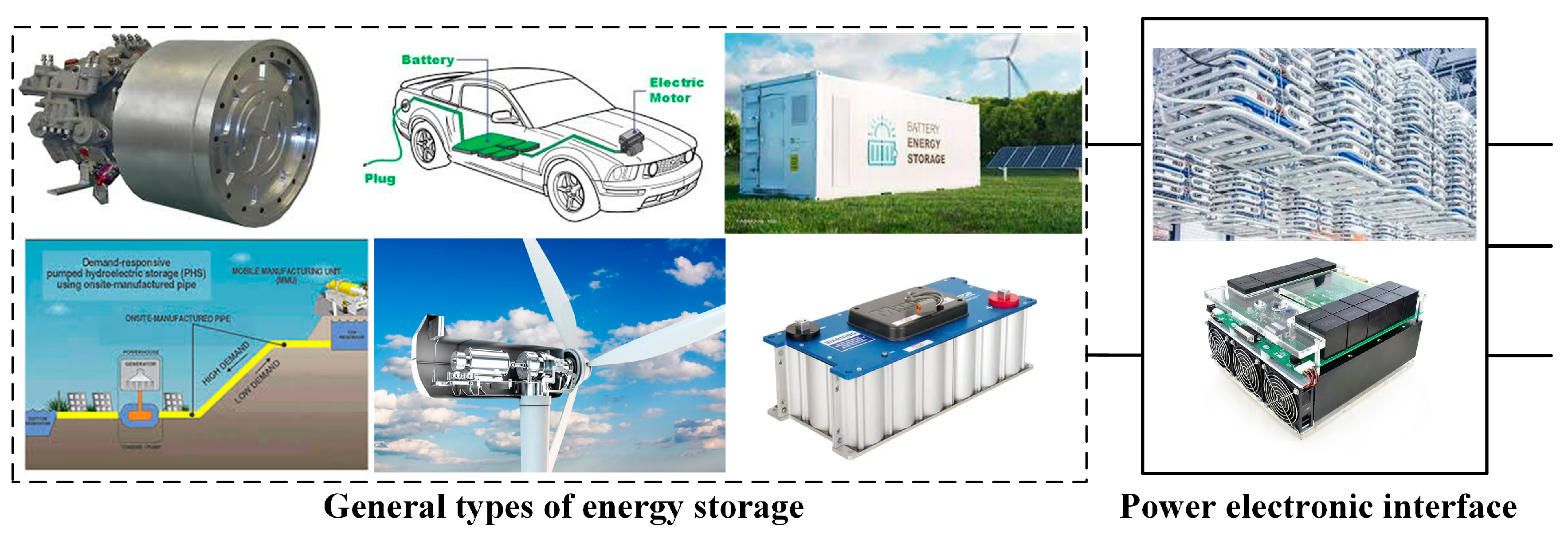
- General installation types of power electronic converters for ESS-based VSM, including a single ESS, and hybrid ESS realized by DC and AC coupled schemes, are introduced, which broaden the options of VSM realization compared with the existing control strategies based on specific energy storage installation.
- The steady-state energy variation of ESS regarding the control parameters of VSM, such as virtual governor, damping, and frequency integral control gain, is quantified, which provides a rough estimation of the margin needed when determining those parameters.
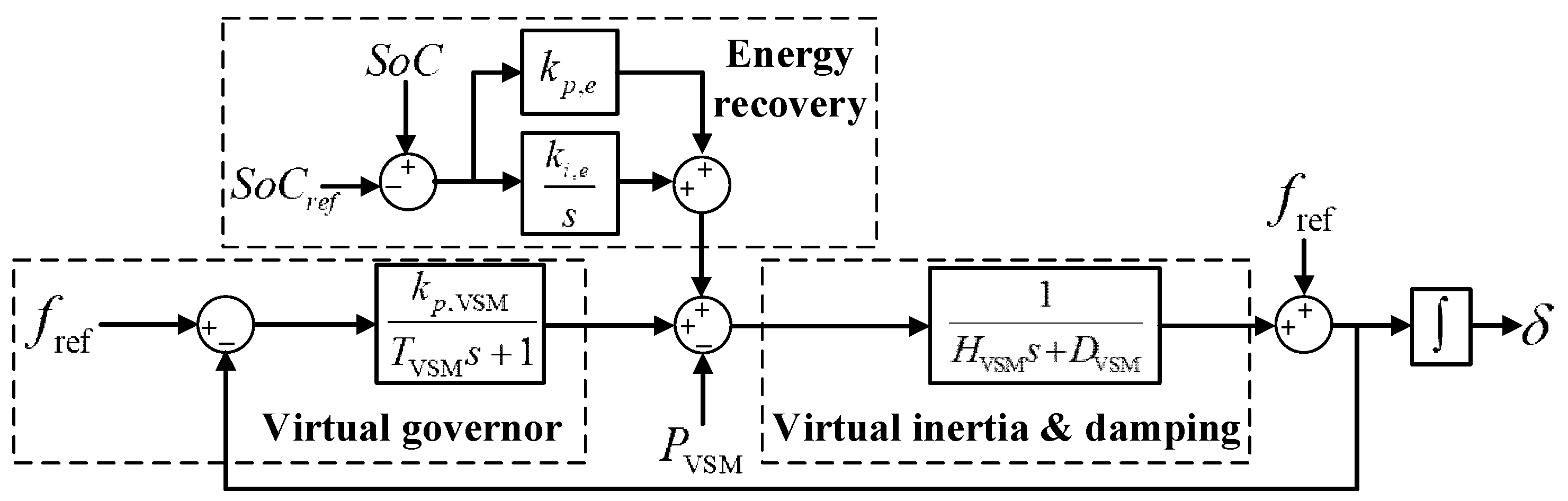
- A supplementary energy recovery control in addition to the VSM control on the grid-side DC–AC converter is proposed, thereby restoring the energy losses and ensuring energy reserve for continuous VSM operation. The control parameter design ensures high stability and bandwidth separation between energy recovery and the frequency control loop.
2. General ESS-Based VSM with Energy Recovery Control
2.1. Significance of General ESS-Based VSM
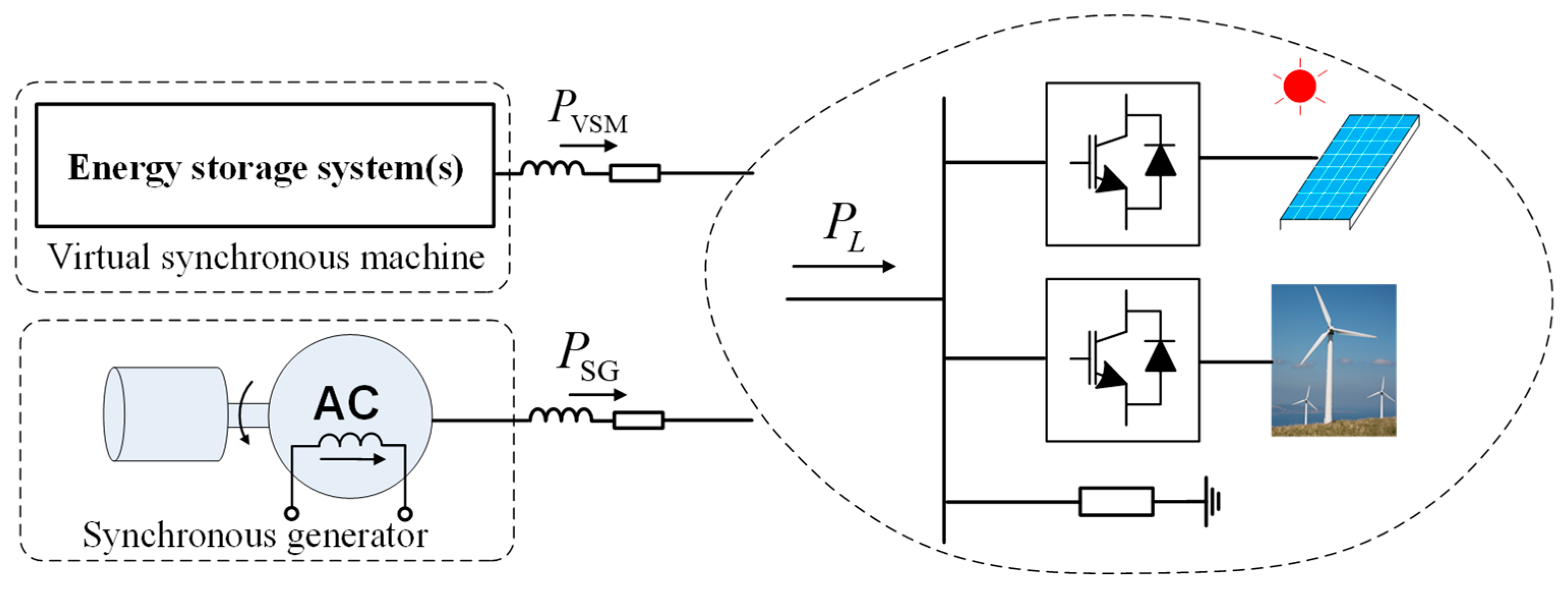
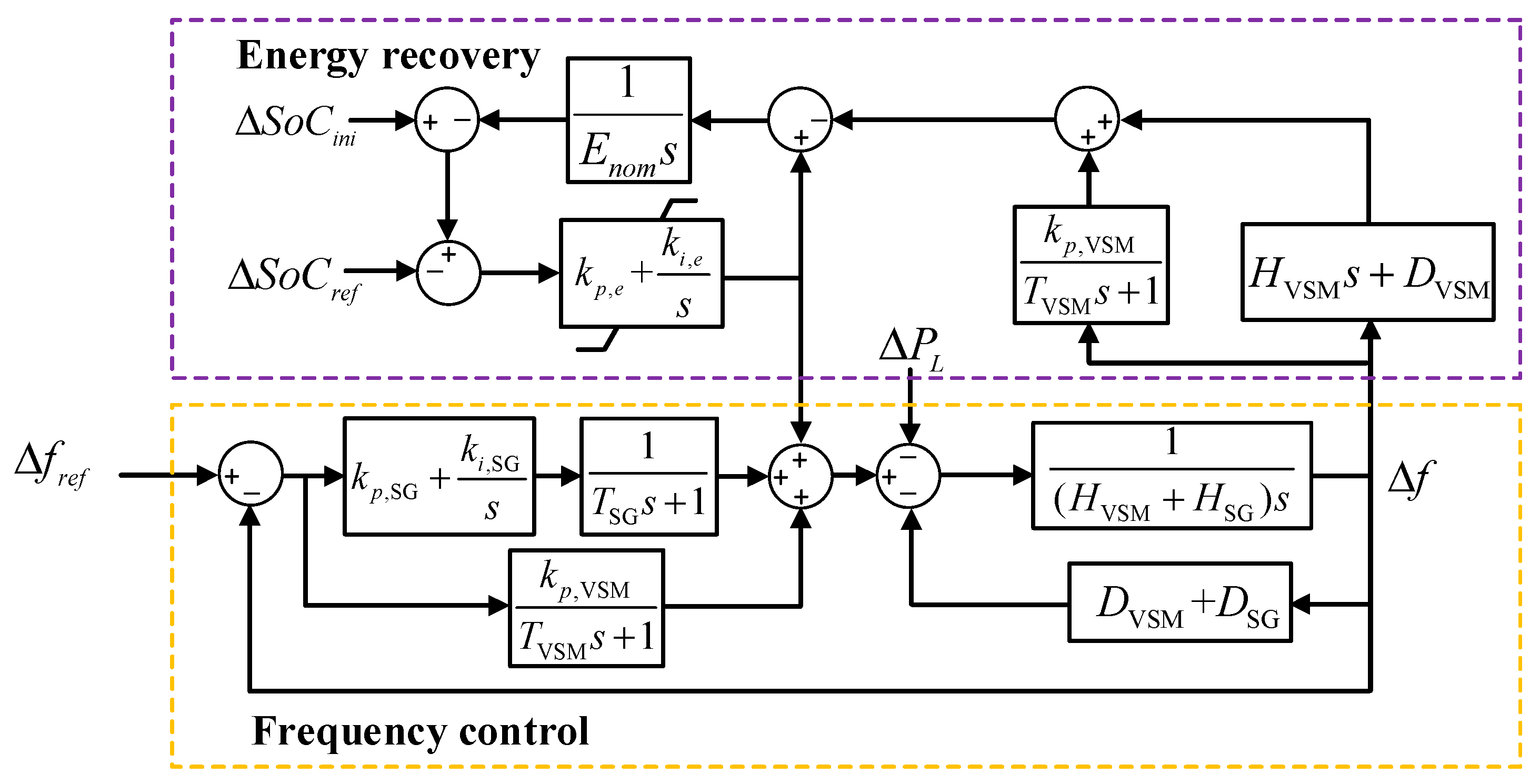
2.2. General ESS-Based VSM with Energy Recovery Control
3. Dynamic Analysis and Design for General VSM with Energy Recovery Control
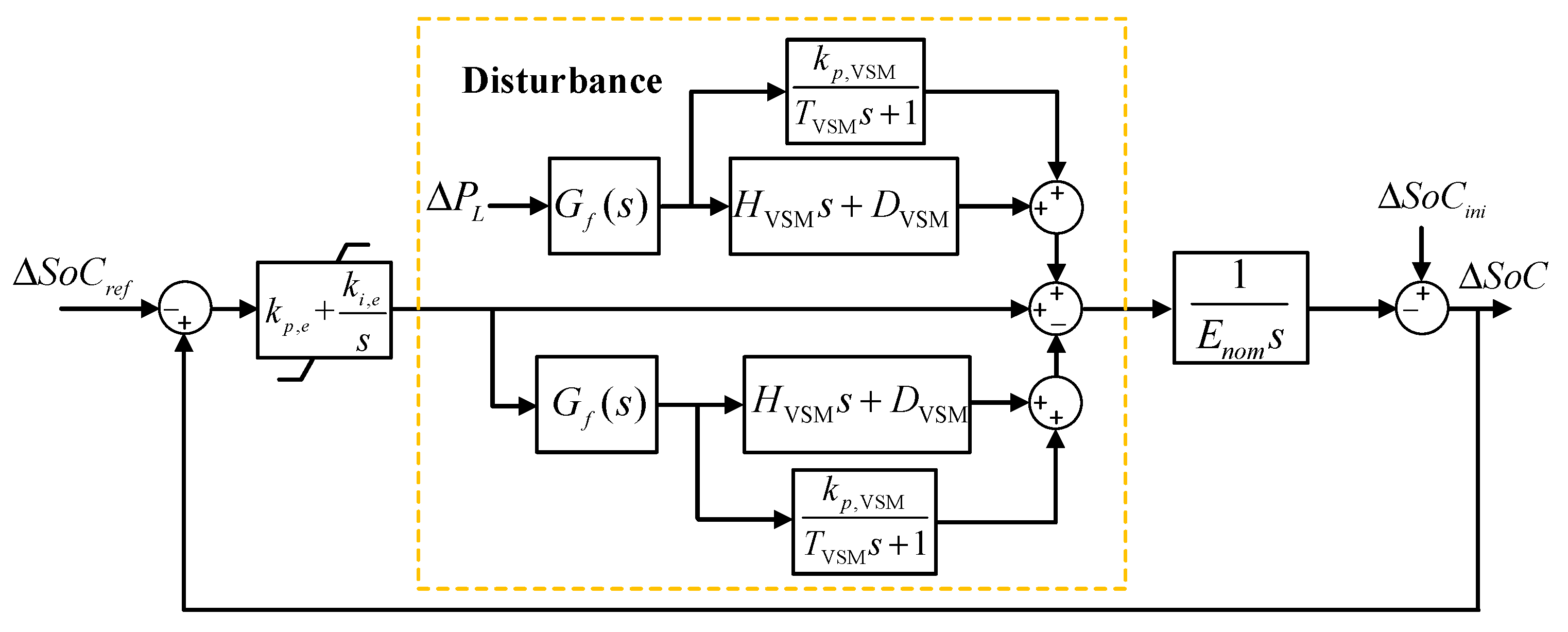
3.1. Frequency, Power and Energy Dynamics
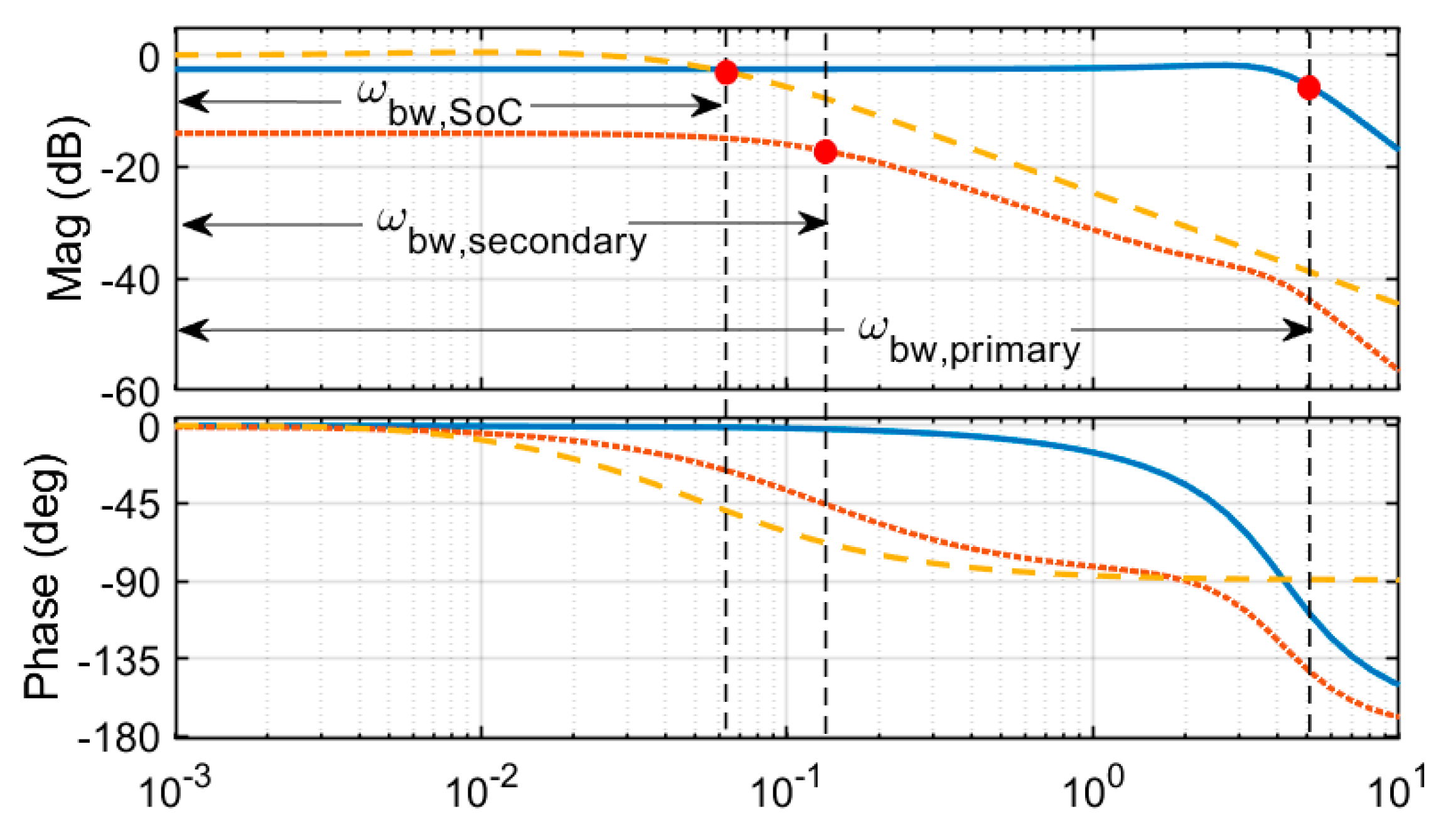
3.2. Bandwidth Separation Design for Frequency and SoC Control
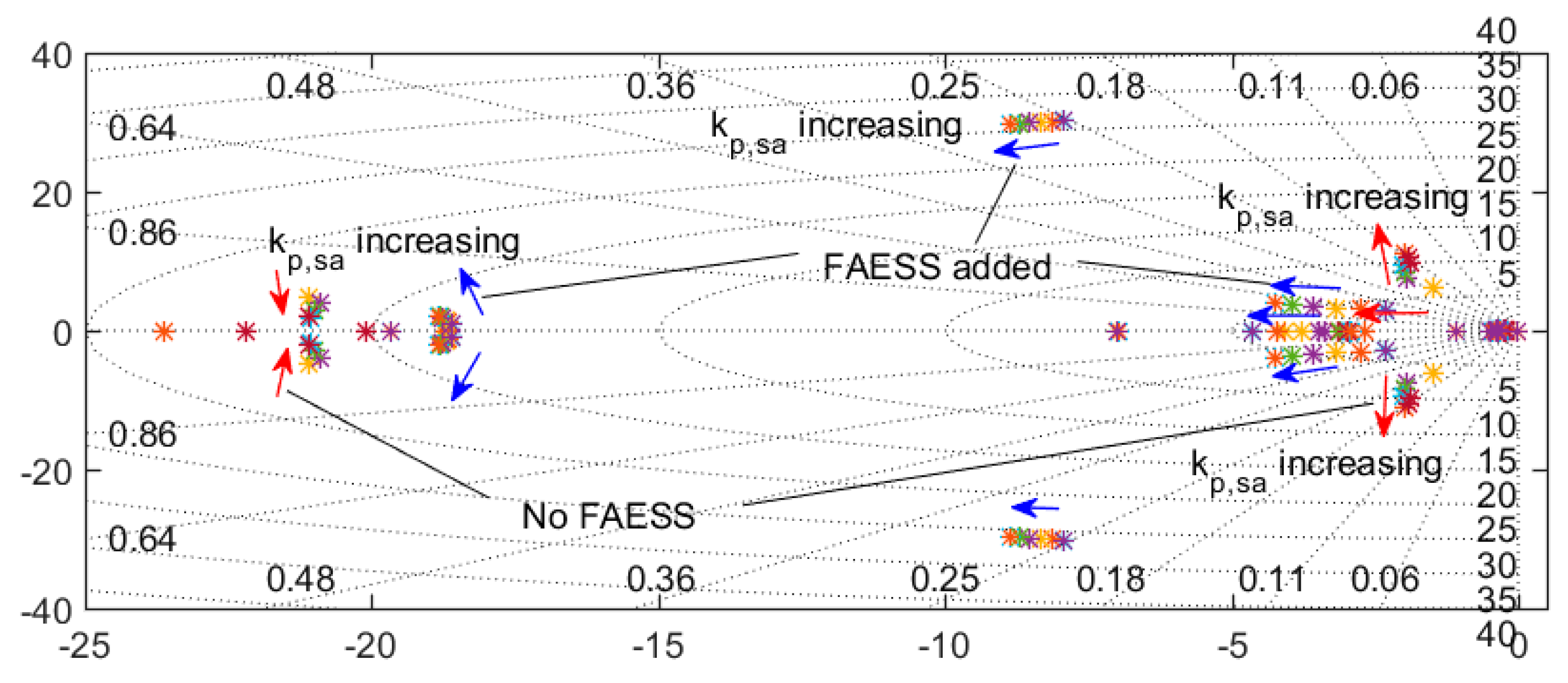
3.3. Parameter Design Considering Stability Requirement
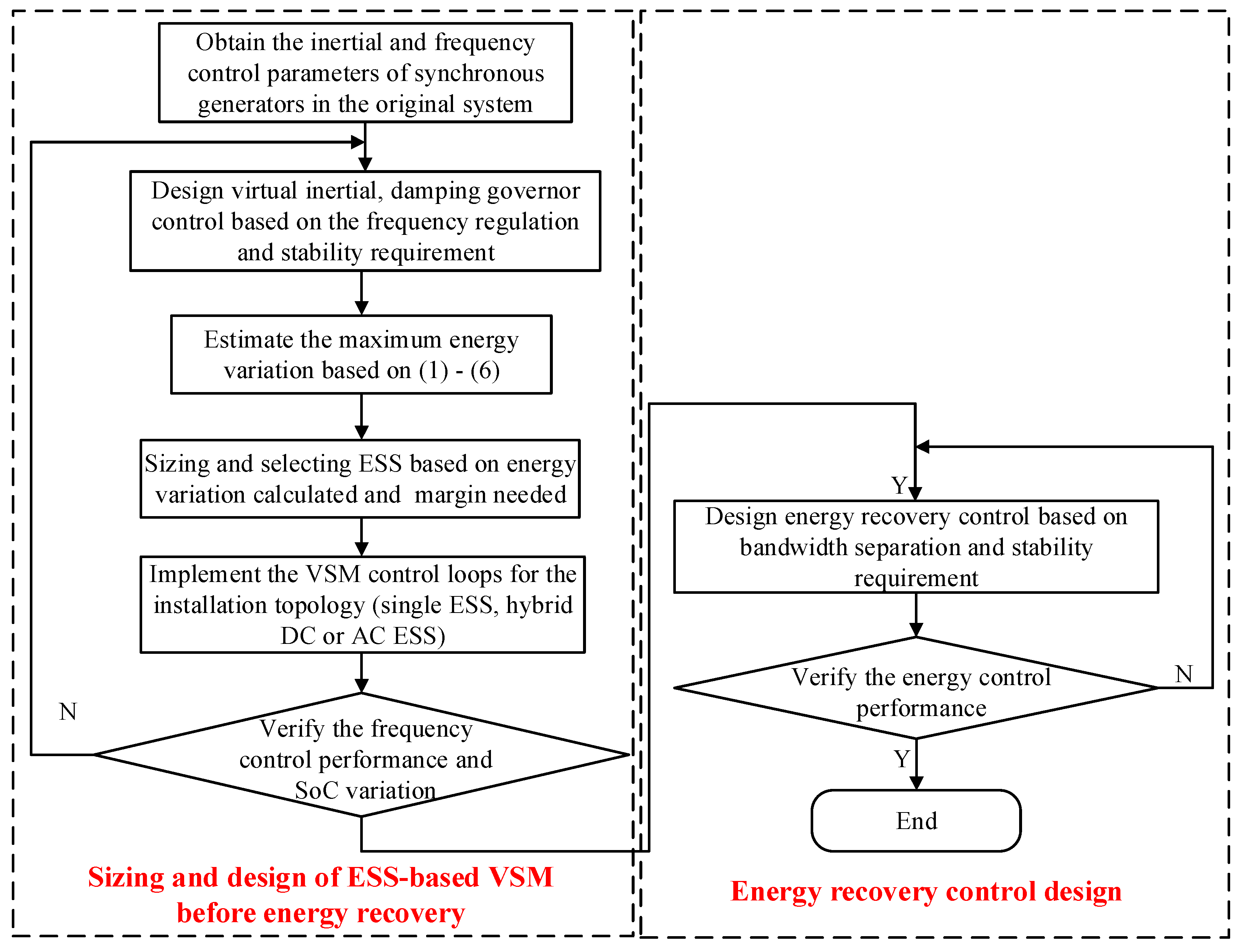
3.4. Control Design and Coordination of General ESS-Based VSM(s)
4. Validation of General ESS-Based VSM Control
4.1. Simulation Test of a Single ESS-Based VSM under Step Load Change
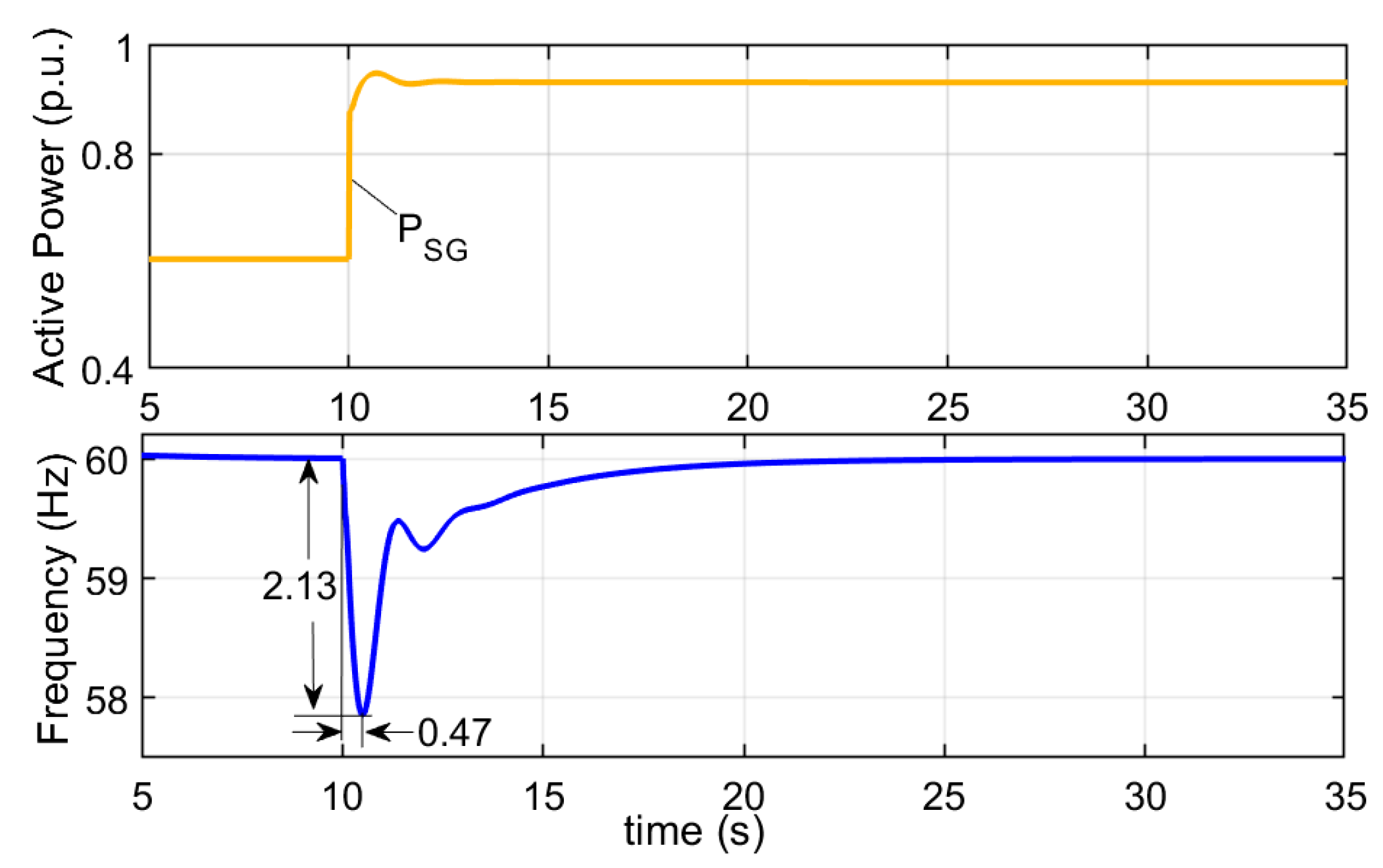
4.1.1. Case 1: Synchronous Generator Only
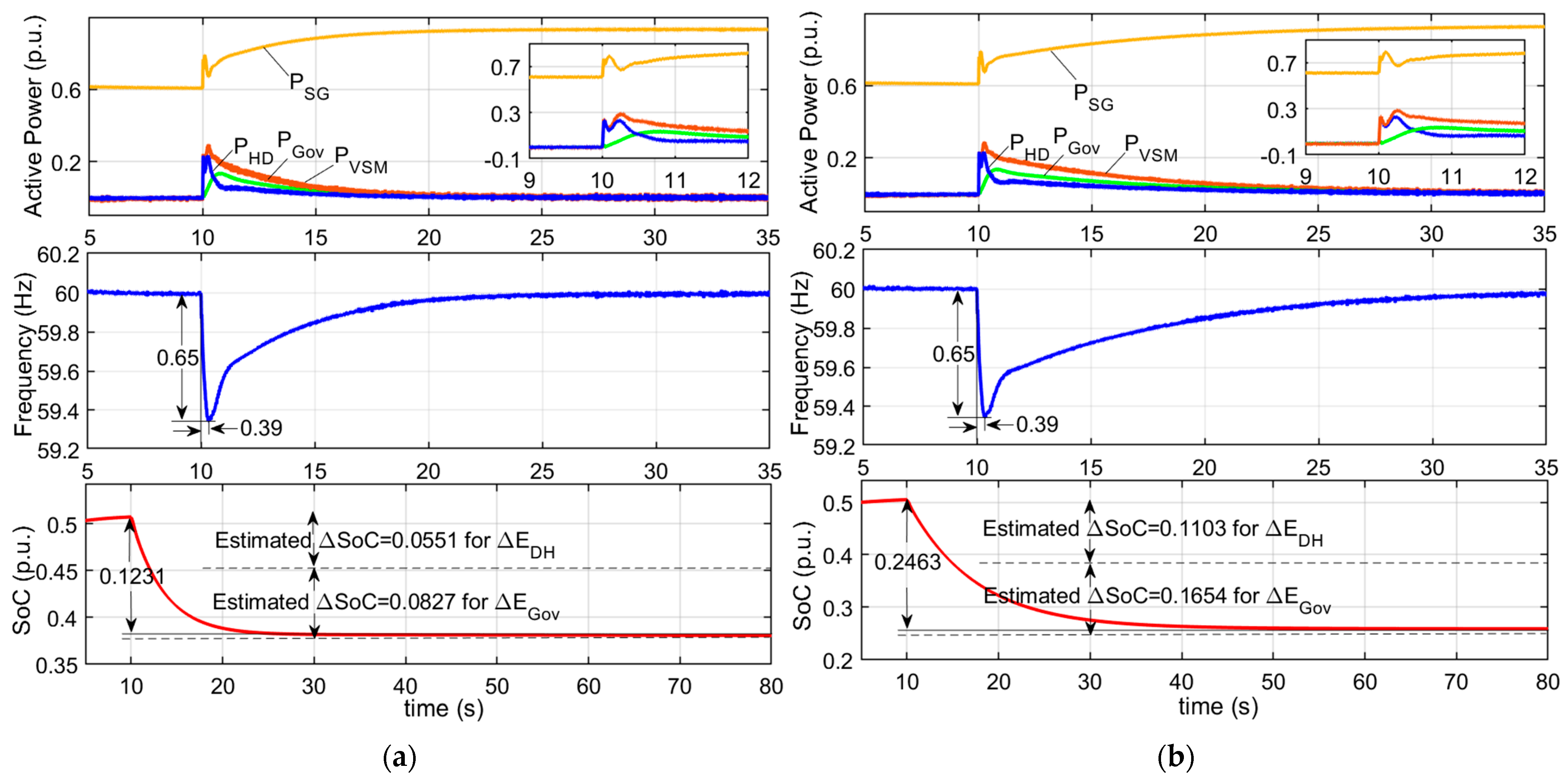
4.1.2. Case 2: Add VSM without Energy Recovery, for Different Frequency Integral Gains
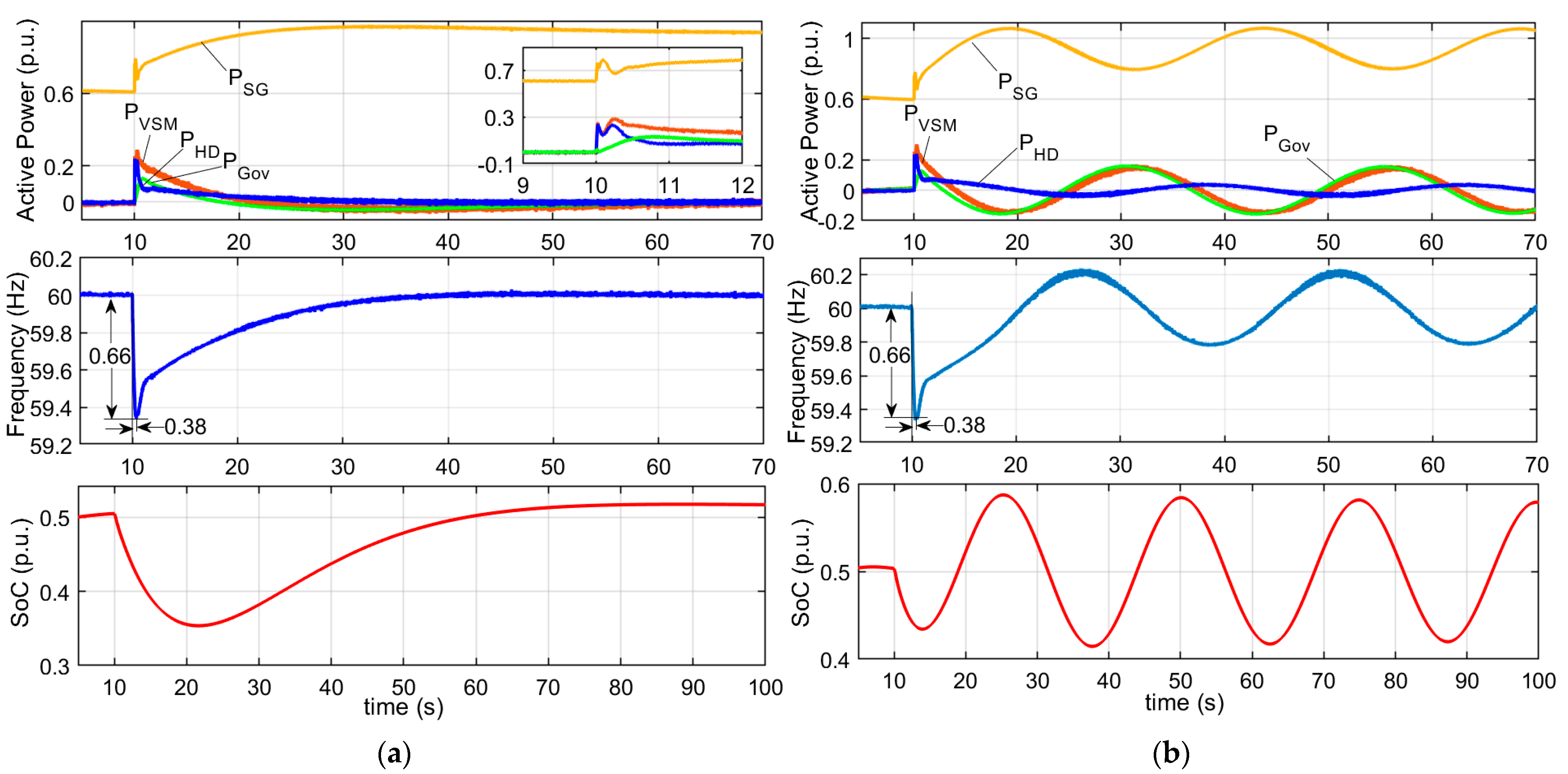
4.1.3. Case 3: Add ESS-Based VSM with Energy Recovery Control
4.1.4. Summary and Discussion
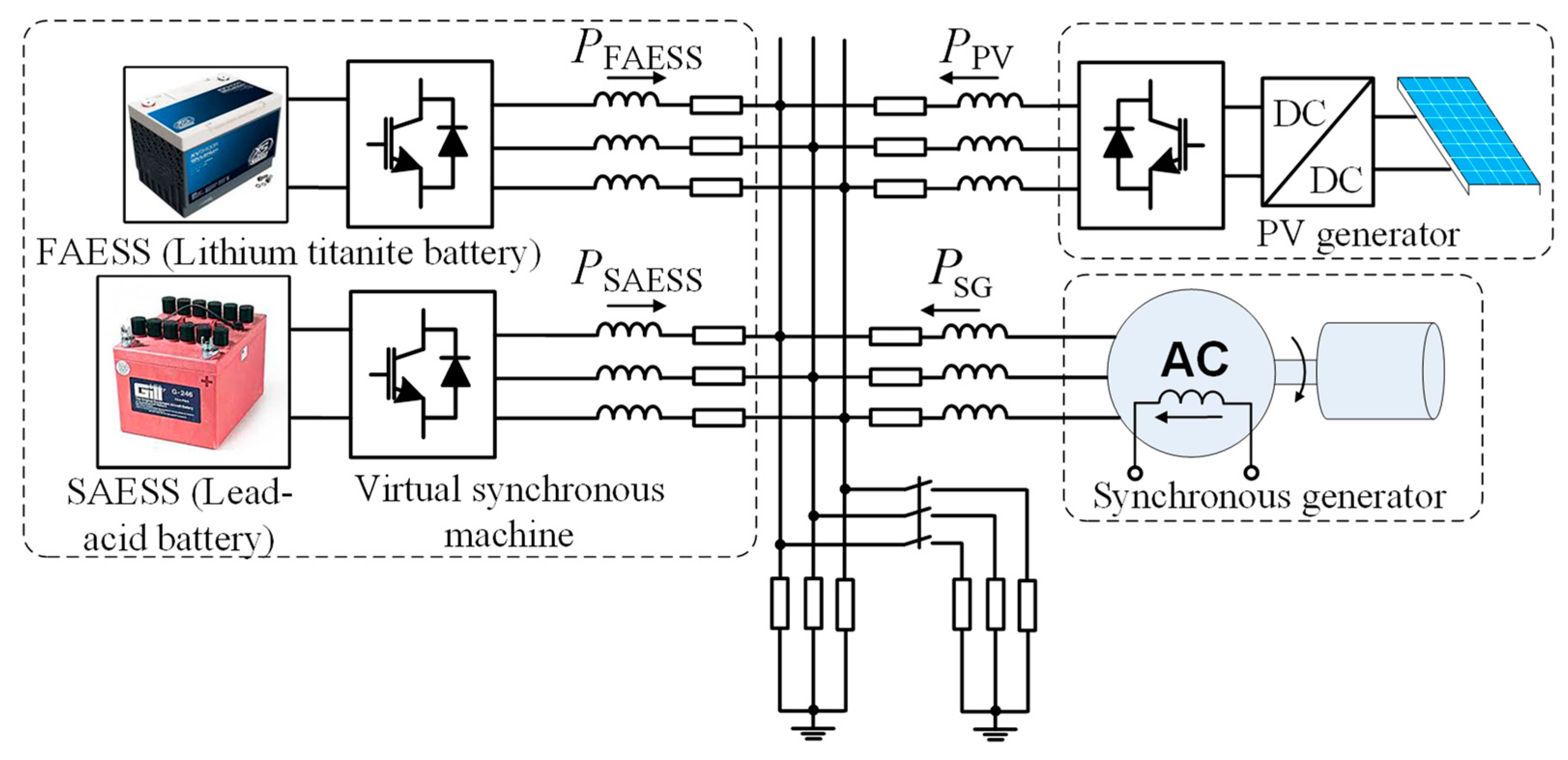
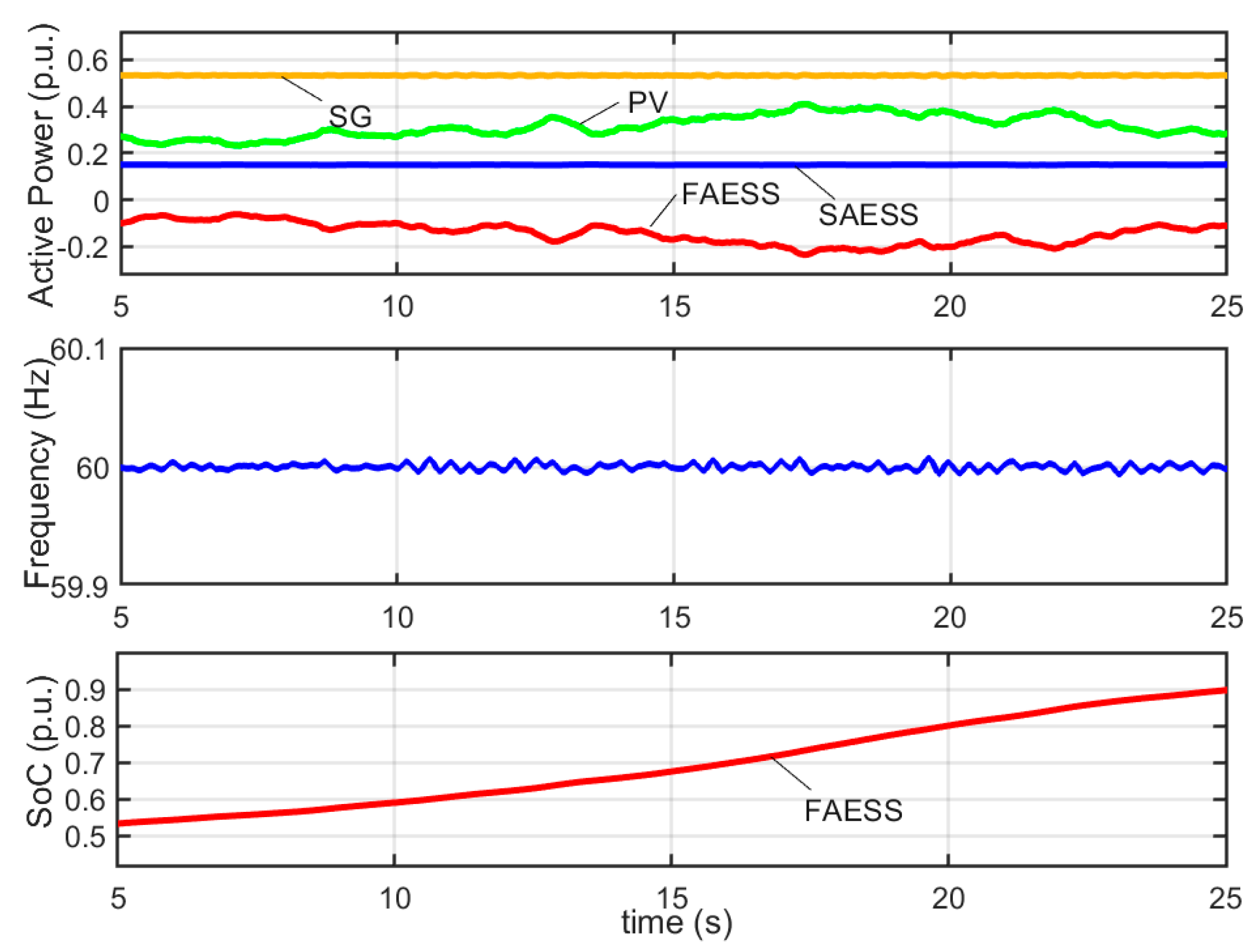
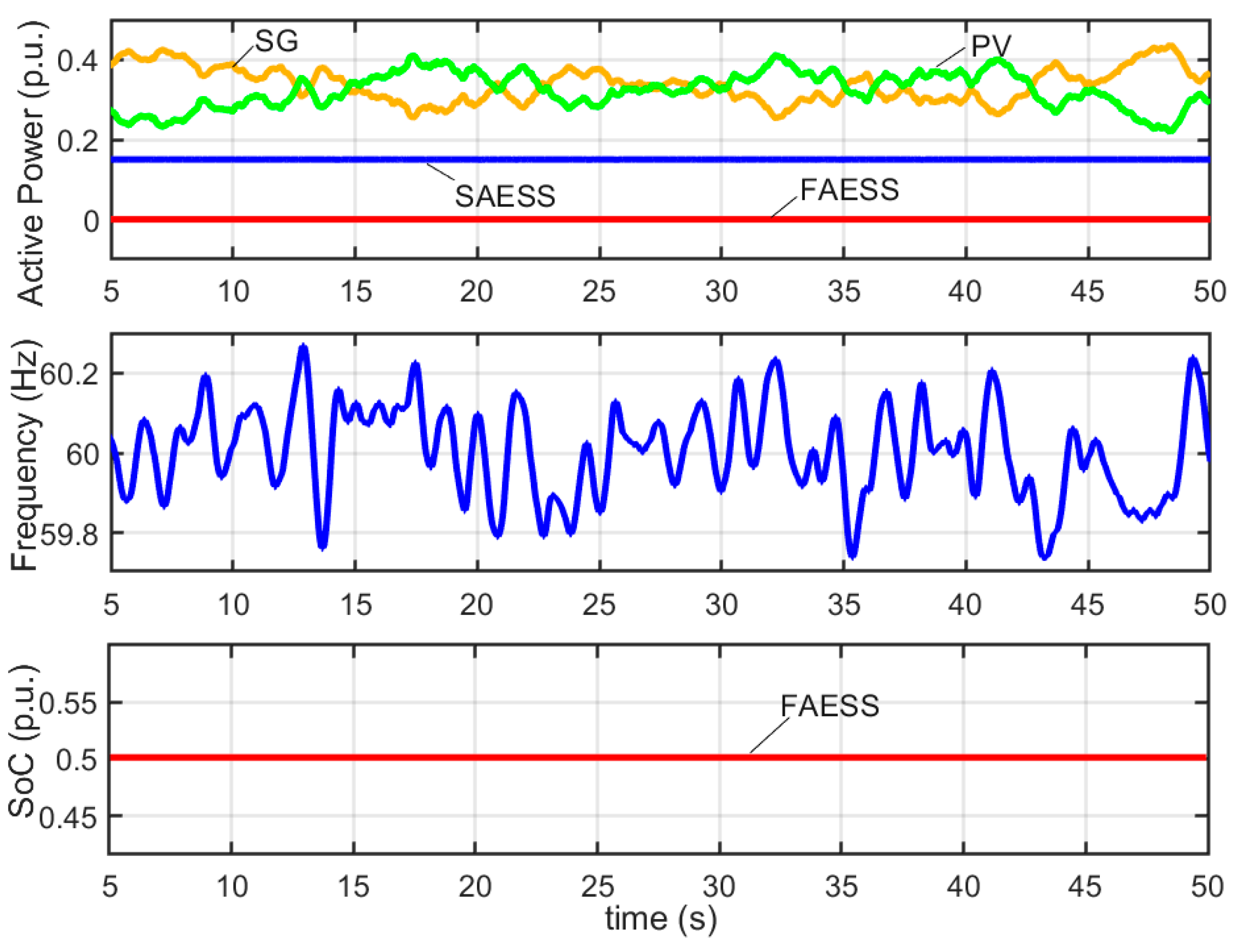
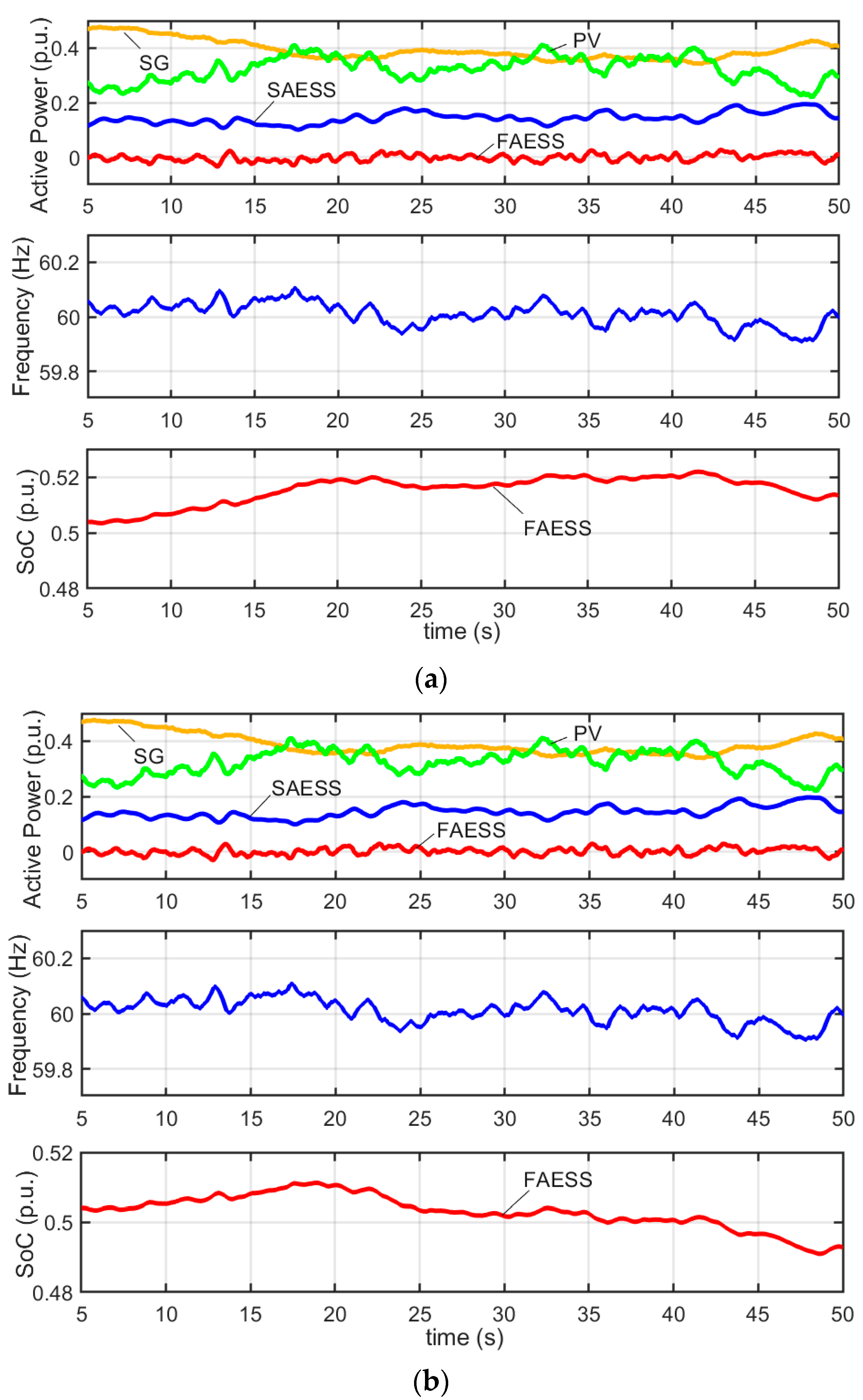
4.2. Simulation Test of Hybrid ESS-Based VSM under Renewable Generation Fluctuation
5. Limitations and Future Research Directions
5.1. Operating Limitations of Renewable Energy Resources for VSM Implementation
5.2. Control and Stability of VSM in Faulty Conditions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, C.; Ali, S.Q.; Joos, G.; Bouffard, F. Design of Hybrid-Storage-Based Virtual Synchronous Machine with Energy Recovery Control Considering Energy Consumed in Inertial and Damping Support. IEEE Trans. Power Electron. 2022, 37, 2648–2666. [Google Scholar] [CrossRef]
- Rosso, R.; Wang, X.; Liserre, M.; Lu, X.; Engelken, S. Grid-Forming Converters: Control Approaches, Grid-Synchronization, and Future Trends—A Review. IEEE Open J. Ind. Appl. 2021, 2, 93–109. [Google Scholar] [CrossRef]
- Shi, K.; Song, W.; Xu, P.; Liu, R.; Fang, Z.; Ji, Y. Low-voltage ride-through control strategy for a virtual synchronous generator based on smooth switching. IEEE Access 2017, 6, 2703–2711. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Kestelyn, X.; Guillaud, X. Current limiting algorithms and transient stability analysis of grid-forming VSCs. Electr. Power Syst. Res. 2020, 189, 106726. [Google Scholar] [CrossRef]
- Rokrok, E.; Qoria, T.; Bruyere, A.; Francois, B.; Guillaud, X. Transient Stability Assessment and Enhancement of Grid-Forming Converters Embedding Current Reference Saturation as Current Limiting Strategy. IEEE Trans. Power Syst. 2022, 37, 1519–1531. [Google Scholar] [CrossRef]
- Cheng, H.; Shuai, Z.; Shen, C.; Liu, X.; Li, Z.; Shen, Z.J. Transient Angle Stability of Paralleled Synchronous and Virtual Synchronous Generators in Islanded Microgrids. IEEE Trans. Power Electron. 2020, 35, 8751–8765. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Control system tuning and stability analysis of Virtual Synchronous Machines. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2664–2671. [Google Scholar]
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of Virtual Synchronous Machines with Dynamic or Quasi-Stationary Machine Models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar] [CrossRef]
- Sun, C.; Bouffard, F.; Chen, J. A Generalized Multi-filter-based Oscillation Damping Approach for Droop-controlled Inverters in Microgrid. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Shadoul, M.; Ahshan, R.; AlAbri, R.S.; Al-Badi, A.; Albadi, M.; Jamil, M. A Comprehensive Review on a Virtual-Synchronous Generator: Topologies, Control Orders and Techniques, Energy Storages, and Applications. Energies 2022, 15, 8406. [Google Scholar] [CrossRef]
- Abuagreb, M.; Allehyani, M.F.; Johnson, B.K. Overview of Virtual Synchronous Generators: Existing Projects, Challenges, and Future Trends. Electronics 2022, 11, 2843. [Google Scholar] [CrossRef]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.-Y. Virtual Inertia-Based Inverters for Mitigating Frequency Instability in Grid-Connected Renewable Energy System: A Review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef]
- Qing-Chang, Z. Synchronverter without a Dedicated Synchronization Unit. In Power Electronics-Enabled Autonomous Power Systems: Next Generation Smart Grids; IEEE: Piscataway, NJ, USA, 2020; pp. 107–124. [Google Scholar]
- Chen, J.; Zeng, Q.; Li, G.; Xin, Y.; Li, L.; Wang, P. Deviation-Free Frequency Control of MMC-MTDC Converter Based on Improved VSG. In Proceedings of the 2019 4th IEEE Workshop on the Electronic Grid (eGRID), Xiamen, China, 11–14 November 2019; pp. 1–5. [Google Scholar]
- Hirase, Y.; Sugimoto, K.; Sakimoto, K.; Ise, T. Analysis of Resonance in Microgrids and Effects of System Frequency Stabilization Using a Virtual Synchronous Generator. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1287–1298. [Google Scholar] [CrossRef]
- Gong, X.; Wang, X. A novel Koopman-inspired method for the secondary control of microgrids with grid-forming and grid-following sources. Appl. Energy 2023, 333, 120631. [Google Scholar] [CrossRef]
- Zhang, W.; Yan, X. Equivalence Analysis of Virtual Synchronous Machines and Frequency-Droops for Inertia Emulation in Power Systems with Converter-Interfaced Renewables. J. Electr. Eng. Technol. 2020, 15, 1167–1175. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, X.; Yang, E.; Yan, X. Economic analysis and configuration design for the energy storage unit of photovoltaic virtual synchronous generator based on the inertia support and primary frequency control. Int. J. Electr. Power Energy Syst. 2022, 134, 107349. [Google Scholar] [CrossRef]
- Shi, M.; Chen, H.; Zhang, C.; Mei, F.; Fang, J.; Miao, H. A virtual synchronous generator system control method with battery SOC feedback. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–4. [Google Scholar]
- Yuan, C.; Liu, C.; Yang, D.; Zhou, R.; Tang, N. Transient Characteristics and Physical Constraints of Grid-Tied Virtual Synchronous Machines. J. Power Electron. 2018, 18, 1111–1126. [Google Scholar]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F.; Tolbert, L.M. Virtual synchronous generator control of full converter wind turbines with short-term energy storage. IEEE Trans. Ind. Electron. 2017, 64, 8821–8831. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed power system virtual inertia implemented by grid-connected power converters. IEEE Trans. Power Electron. 2017, 33, 8488–8499. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Battery/Ultracapacitor Hybrid Energy Storage System for Implementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Sun, C.; Ali, S.Q.; Joos, G.; Bouffard, F. Virtual synchronous machine control for low-inertia power system considering energy storage limitation. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 6021–6028. [Google Scholar]
- Liu, C.; Fang, J. Analysis and Design of Inertia for Grid-Tied Electric Vehicle Chargers Operating as Virtual Synchronous Machines. Appl. Sci. 2022, 12, 2194. [Google Scholar] [CrossRef]
- Ebrahimi, H.; Yazdaninejadi, A.; Golshannavaz, S. Transient stability enhancement in multiple-microgrid networks by cloud energy storage system alongside considering protection system limitations. IET Gener. Transm. Distrib. 2022, 17, 1816–1826. [Google Scholar] [CrossRef]
- Shim, J.W.; Verbič, G.; Zhang, N.; Hur, K. Harmonious integration of faster-acting energy storage systems into frequency control reserves in power grid with high renewable generation. IEEE Trans. Power Syst. 2018, 33, 6193–6205. [Google Scholar] [CrossRef]
- Christiansen, C.; Murray, B.; Conway, G.; Chambers, C. Energy Storage Study: Funding and Knowledge Sharing Priorities; AECOM: Sydney, Australia, 2015. [Google Scholar]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 137, 511–536. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Wang, Y.; Ren, B. Connecting the home grid to the public grid: Field demonstration of virtual synchronous machines. IEEE Power Electron. Mag. 2019, 6, 41–49. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Sun, C.; Ali, S.Q.; Joos, G. Opportunities and Challenges in Electric Vehicle Fleet Charging Management. In Electric Vehicle Integration in a Smart Microgrid Environment; CRC Press: Boca Raton, FL, USA, 2021; pp. 33–71. [Google Scholar]
- Zhang, H.; Xiang, W.; Lin, W.; Wen, J. Grid forming converters in renewable energy sources dominated power grid: Control strategy, stability, application, and challenges. J. Mod. Power Syst. Clean Energy 2021, 9, 1239–1256. [Google Scholar] [CrossRef]
- Sun, C.; Joos, G.; Bouffard, F. Identification of low-frequency oscillation mode and improved damping design for virtual synchronous machines in microgrid. IET Gener. Transm. Distrib. 2019, 13, 2993–3001. [Google Scholar] [CrossRef]
- Sun, C.; Joos, G.; Ali, S.Q.; Paquin, J.N.; Rangel, C.M.; Al Jajeh, F.; Novickij, I.; Bouffard, F. Design and real-time implementation of a centralized microgrid control system with rule-based dispatch and seamless transition function. IEEE Trans. Ind. Appl. 2020, 56, 3168–3177. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on grid-forming inverter control methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Liu, B.; Zhao, J.; Huang, Q.; Milano, F.; Zhang, Y.; Hu, W. Nonlinear Virtual Inertia Control of WTGs for Enhancing Primary Frequency Response and Suppressing Drivetrain Torsional Oscillations. IEEE Trans. Power Syst. 2021, 36, 4102–4113. [Google Scholar] [CrossRef]
- Sun, C.; Ali, S.Q.; Joos, G.; Bouffard, F. Improved VSG Control for Type-IV Wind Turbine Generator Considering Operation Limitations. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 2085–2091. [Google Scholar]
- Zhang, J.; Zhang, B.; Li, Q.; Zhou, G.; Wang, L.; Li, B.; Li, K. Fast Frequency Regulation Method for Power System With Two-Stage Photovoltaic Plants. IEEE Trans. Sustain. Energy 2022, 13, 1779–1789. [Google Scholar] [CrossRef]
- Radaelli, L.; Martinez, S. Frequency Stability Analysis of a Low Inertia Power System with Interactions among Power Electronics Interfaced Generators with Frequency Response Capabilities. Appl. Sci. 2022, 12, 11126. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- IEEE Std 1547-2018 (Revision of IEEE Std 1547-2003); IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: Piscataway, NJ, USA, 2018; pp. 1–138.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Features | Main Limitations | Typical References |
|---|---|---|
| Ideal-source-based VSM | Energy resources on DC side not considered. | [13,14,15,16,17] |
| Single-ESS-based VSM | The energy variation of ESS not analyzed. | [10,11,12] |
| ESS-based VSM with SoC-limit triggered energy recovery | The energy variation of ESS not quantified. The energy reserve is small near the SoC limit. The event trigger control may incur abrupt change. | [19] |
| Short-term ESS integrated with wind-turbine generator with SoC set-point control | The energy variation of ESS not quantified. The impact of SoC setpoint control on frequency regulation not considered. The PI parameters of SoC setpoint control depends on rotor speed. | [21] |
| DC-coupled hybrid ESS including a supercapacitor and a battery | The energy variation of ESS and thus energy recovery control not analyzed. | [23] |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Base Voltage fref | 60 Hz | Base power | 320 kVA |
| Base voltage Vac (LL-RMS) | 600 V | Enom | 6.8 p.u.·s (or 0.6 kWh) |
| Power rating of ESS | 1 p.u. | SoCref of ESS | 0.5 |
| TVSM | 0.3 s | HVSM | 5 s |
| kp,VSM | 15 p.u. | DVSM | 10 p.u. |
| kp,e | 0.4 p.u. | ki,e | 0.002 |
| Power rating of SG | 1 p.u. | HSG | 2.5 s |
| DSG | 0 | TSG | 0.3 s |
| kp,SG | 15 p.u. | ki,SG | 5 p.u. |
| Devices and Key Control Parameters | Frequency Nadir after the Disturbance | Oscillation Behavior | Steady-State SoC Variation of ESS | |
|---|---|---|---|---|
| SG only | 57.98 Hz, 0.19 s after | Period: 0.94 s; Cycles: 2 | N/A | |
| SG and ESS, without SoC recovery | Hfa = 5 s, Dfa = 10 p.u., ki,sg = 5 p.u. | 59.35 Hz, 0.39 s after | Trivial | 0.066 p.u. |
| Hfa = 5 s, Dfa = 10 p.u., ki,sg = 10 p.u. | 59.35 Hz, 0.39 s after | Trivial | 0.013 p.u. | |
| SG and ESS, with SoC recovery | Hfa = 5 s, Dfa = 10 p.u., kp,e = 0.4, ki,e = 0.002 | 59.34 Hz, 0.38 s after | Trivial | 0 p.u. |
| Hfa = 5 s, Dfa = 10 p.u., kp,e = 1, ki,e = 0.5 | 59.34 Hz, 0.38 s after | Period: 12 s; Undamped | N/A | |
| Devices and Key Control Parameters | Frequency Variation | SoC Deviation of FAESS |
|---|---|---|
| FAESS adopts VF control, no SAESS | Almost constant | SoC increases from 0.5 to 0.9 within 20 s |
| All ESS with PLL synchronization and no frequency support | Maximum ±0.22 Hz fluctuation | Kept at 0.5 |
| Hybrid ESS adopts VSM control, without SoC recovery | Maximum ±0.1 Hz fluctuation | Mean SoC increases to 0.51 within 45 s |
| Hybrid ESS adopts VSM control, with SoC recovery | Maximum ±0.1 Hz fluctuation | Mean SoC near 0.5 within 45 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Sun, C.; Zhang, X.; Wang, N.; Wang, J. Design of Energy Recovery Control for General Virtual Synchronous Machines Based on Various Forms of Energy Storage. Appl. Sci. 2023, 13, 8059. https://doi.org/10.3390/app13148059
Liu H, Sun C, Zhang X, Wang N, Wang J. Design of Energy Recovery Control for General Virtual Synchronous Machines Based on Various Forms of Energy Storage. Applied Sciences. 2023; 13(14):8059. https://doi.org/10.3390/app13148059
Chicago/Turabian StyleLiu, Haigang, Chu Sun, Xiaolin Zhang, Na Wang, and Juncheng Wang. 2023. "Design of Energy Recovery Control for General Virtual Synchronous Machines Based on Various Forms of Energy Storage" Applied Sciences 13, no. 14: 8059. https://doi.org/10.3390/app13148059
APA StyleLiu, H., Sun, C., Zhang, X., Wang, N., & Wang, J. (2023). Design of Energy Recovery Control for General Virtual Synchronous Machines Based on Various Forms of Energy Storage. Applied Sciences, 13(14), 8059. https://doi.org/10.3390/app13148059