
Experimental and Numerical Study on the Slug Characteristics and Flow-Induced Vibration of a Subsea Rigid M-Shaped Jumper




Abstract
:1. Introduction
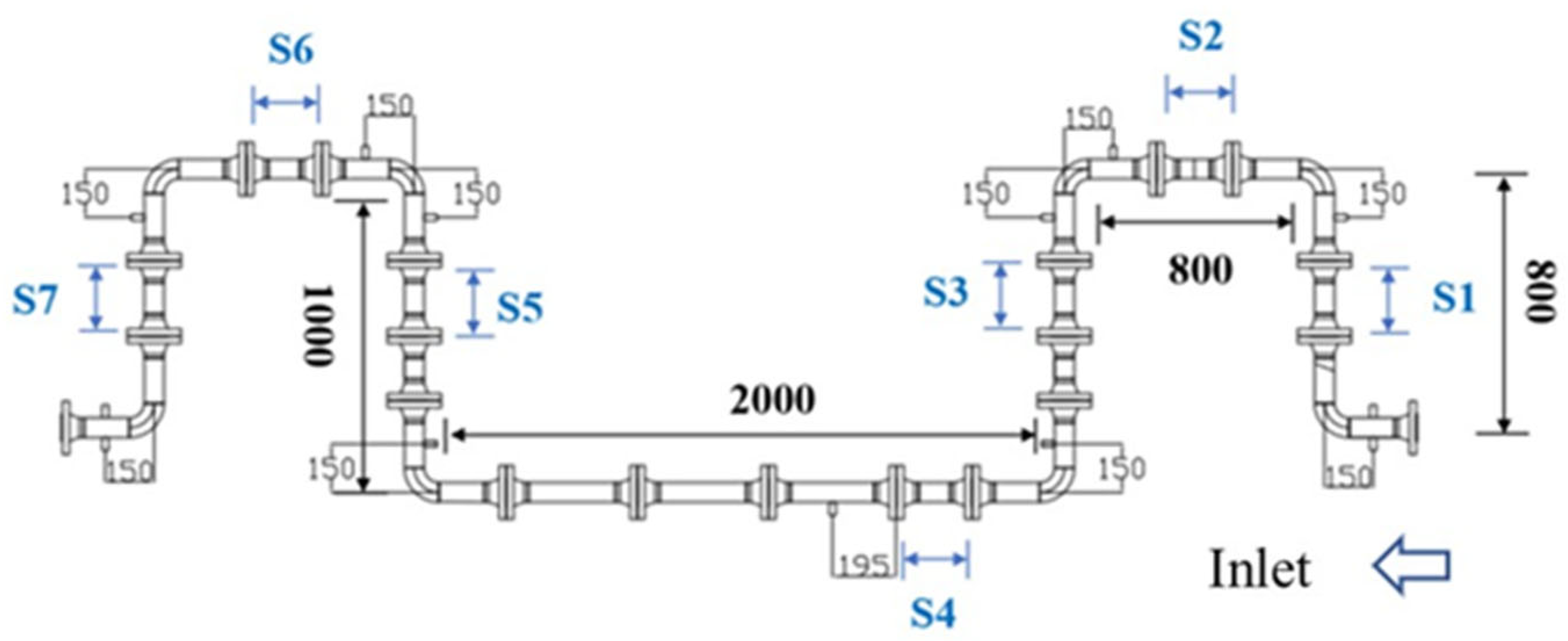
2. Experimental Work
3. Numerical Models
3.1. The VOF Model
3.2. Turbulence Model
3.3. FSI Model
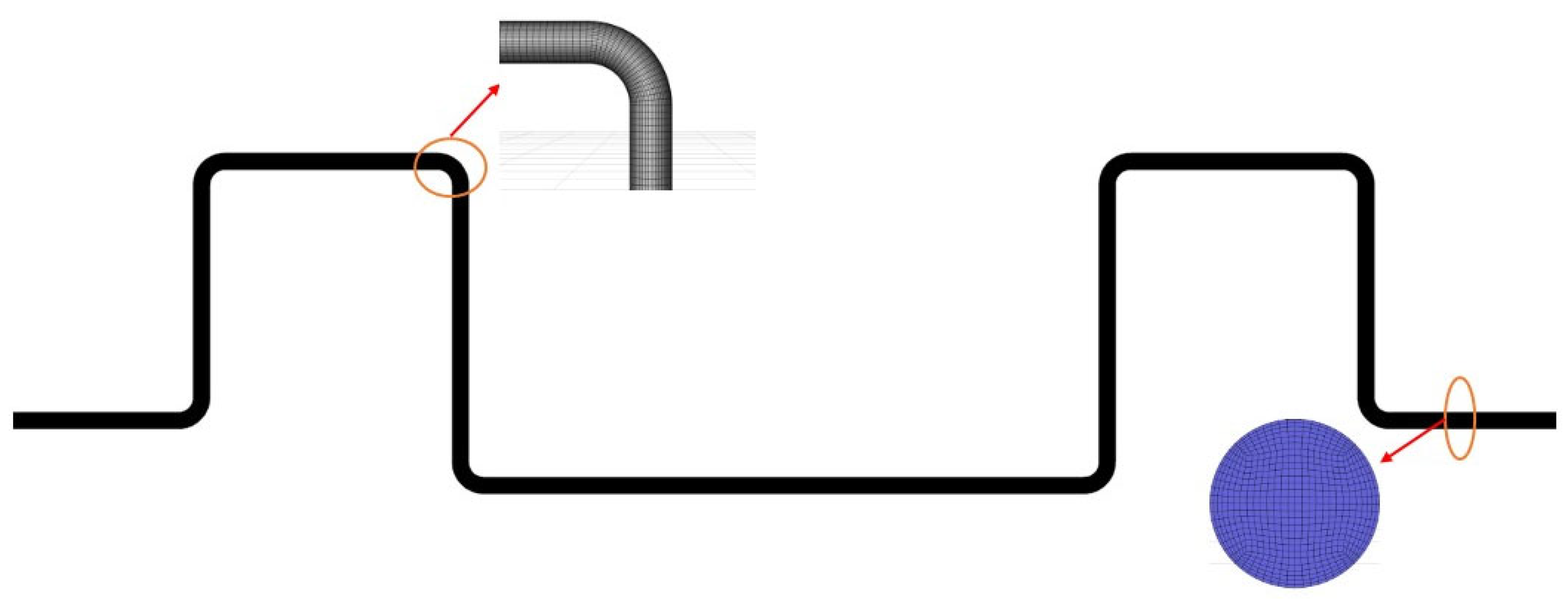
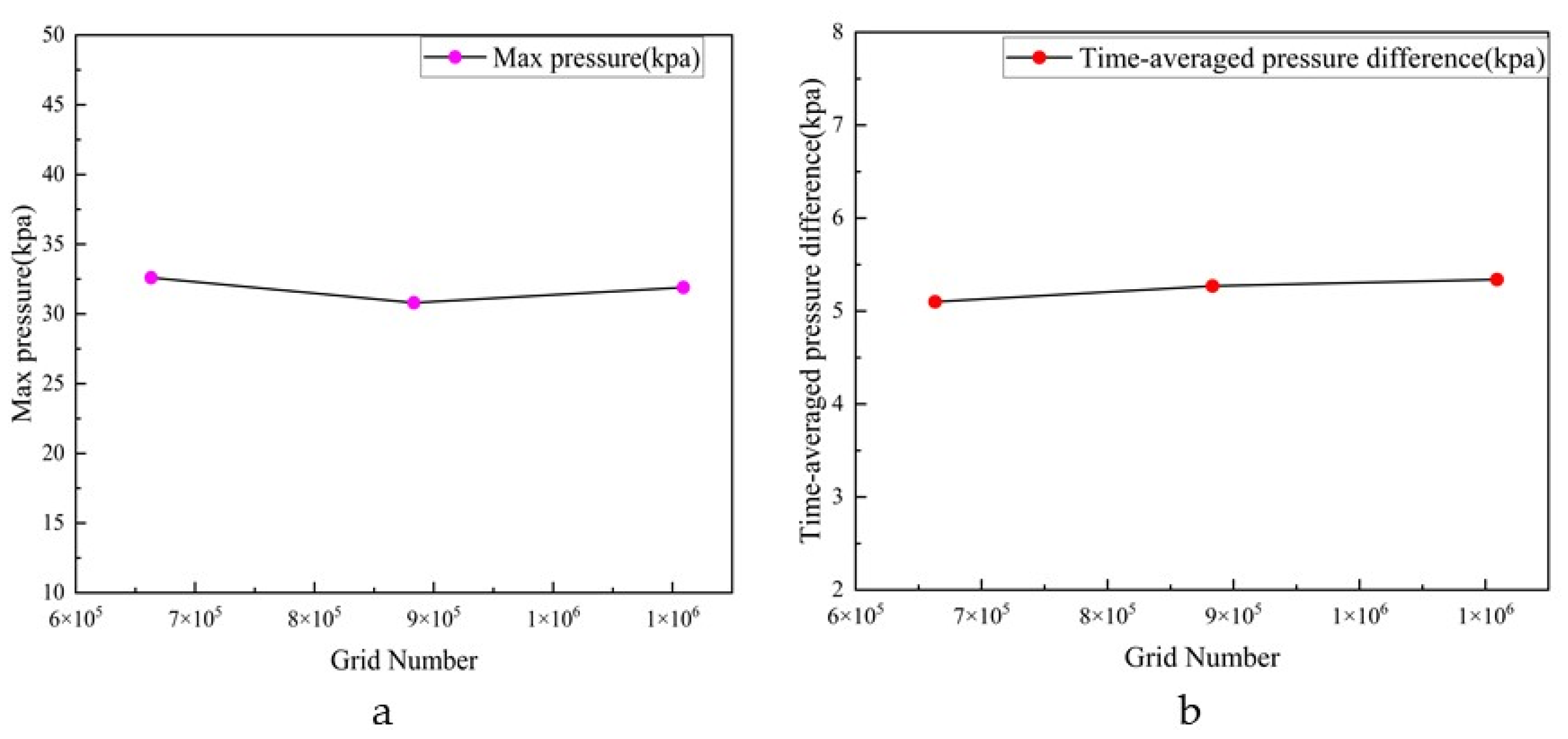
3.4. Boundary Conditions and Mesh Convergence Studies
4. Results and Discussion
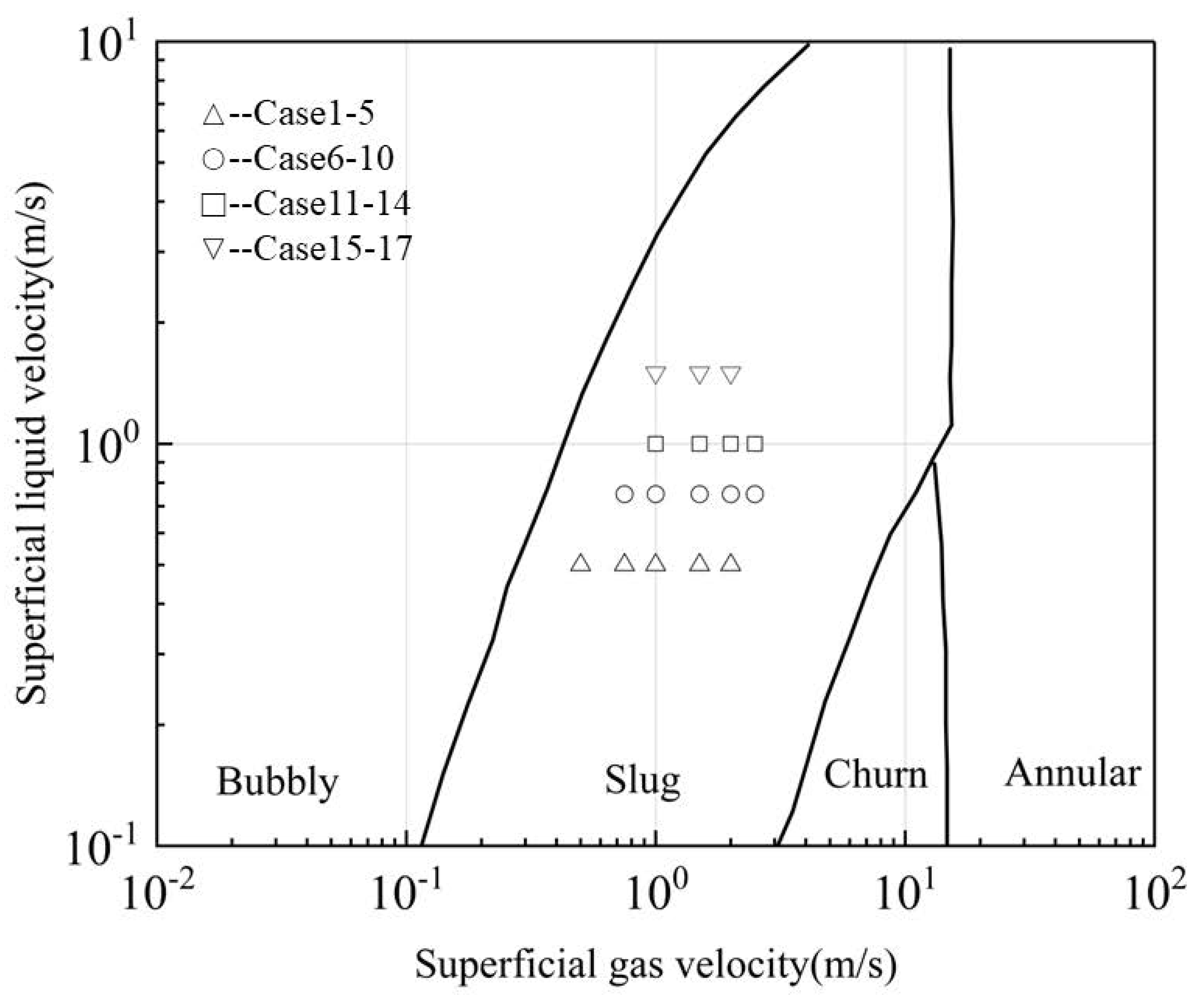
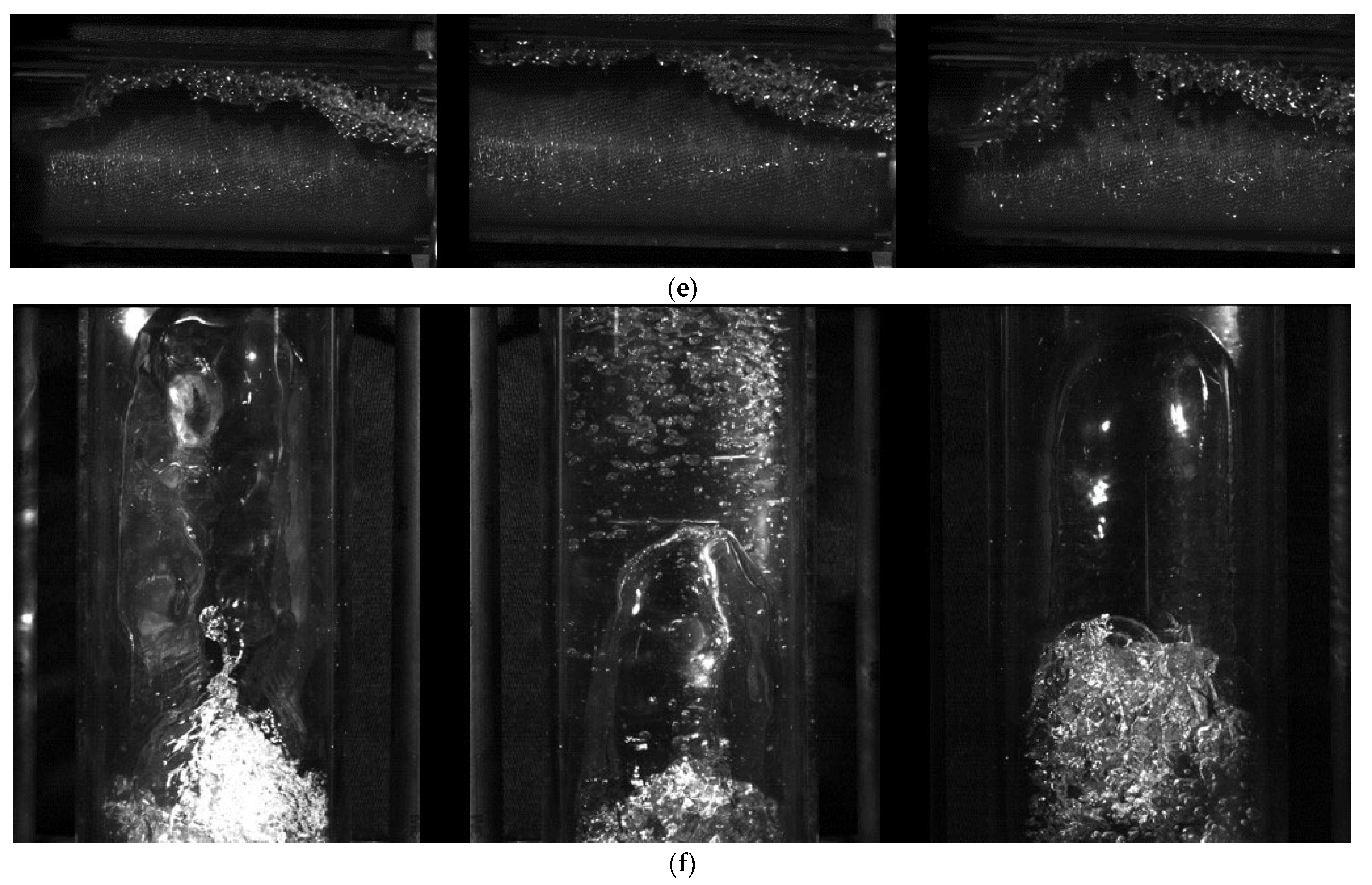
4.1. Visualization of the Slug Flow
4.2. Pressure Fluctuations and Vibration Characteristics Caused by the Slug Flow
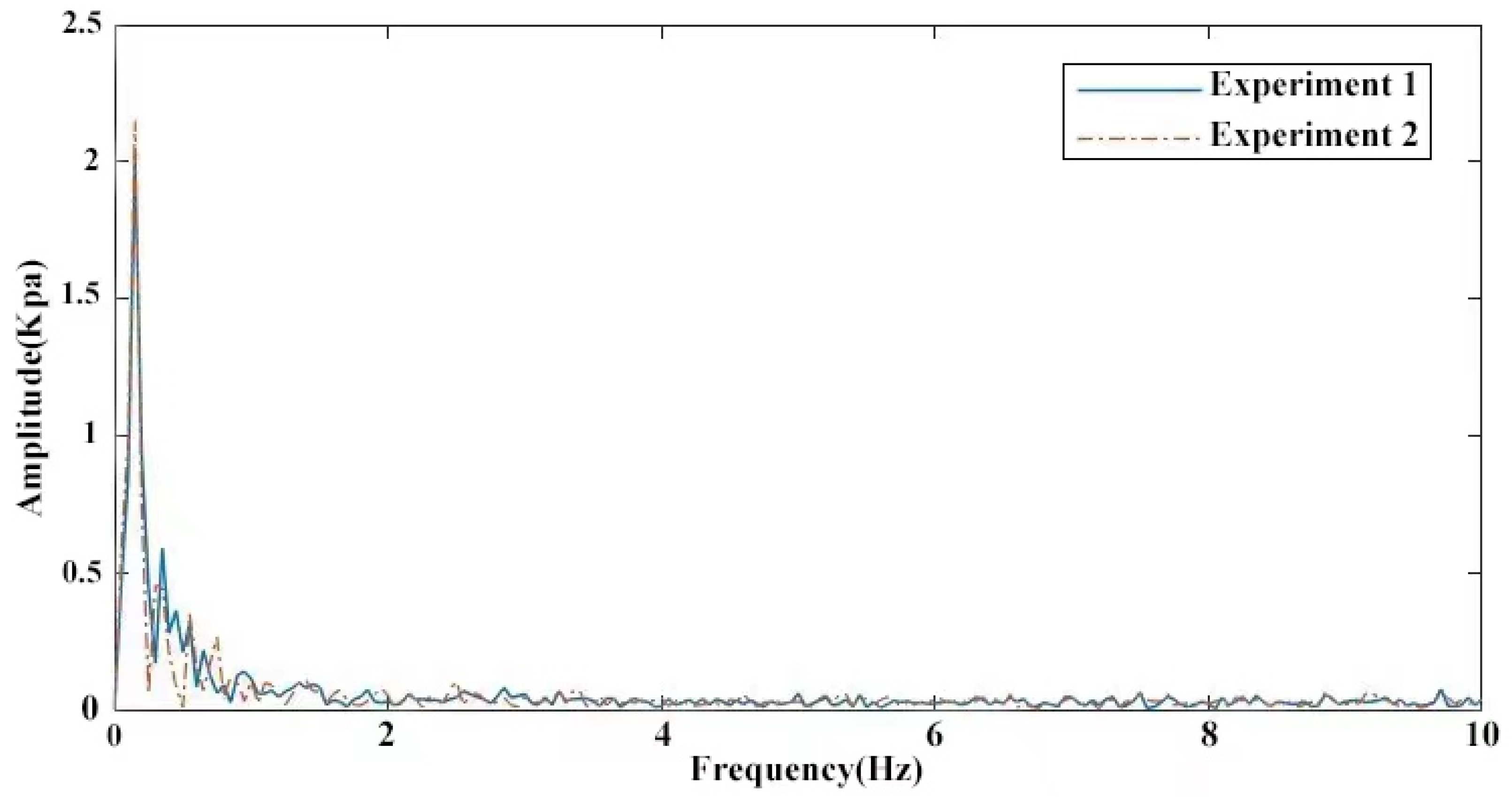
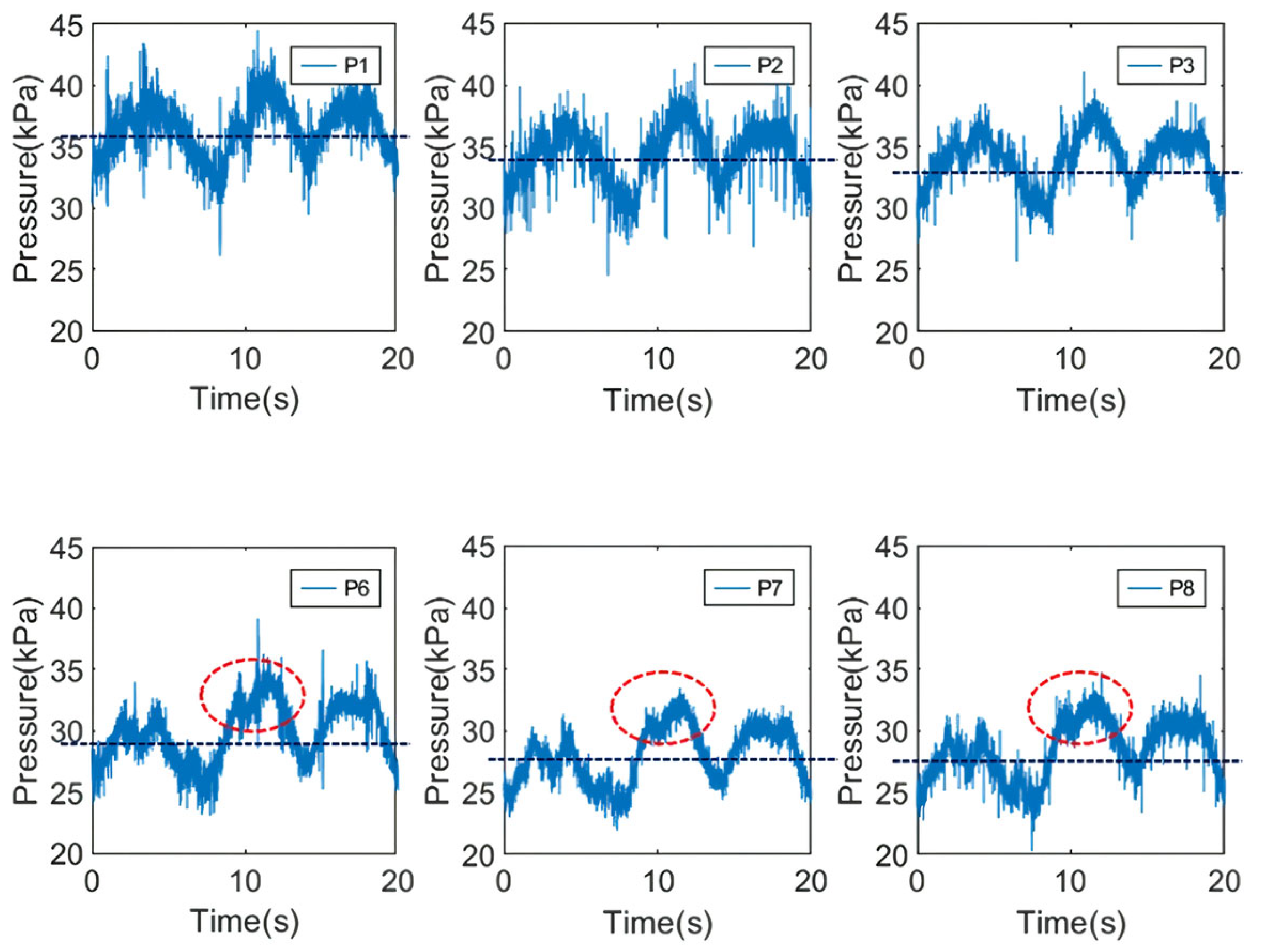
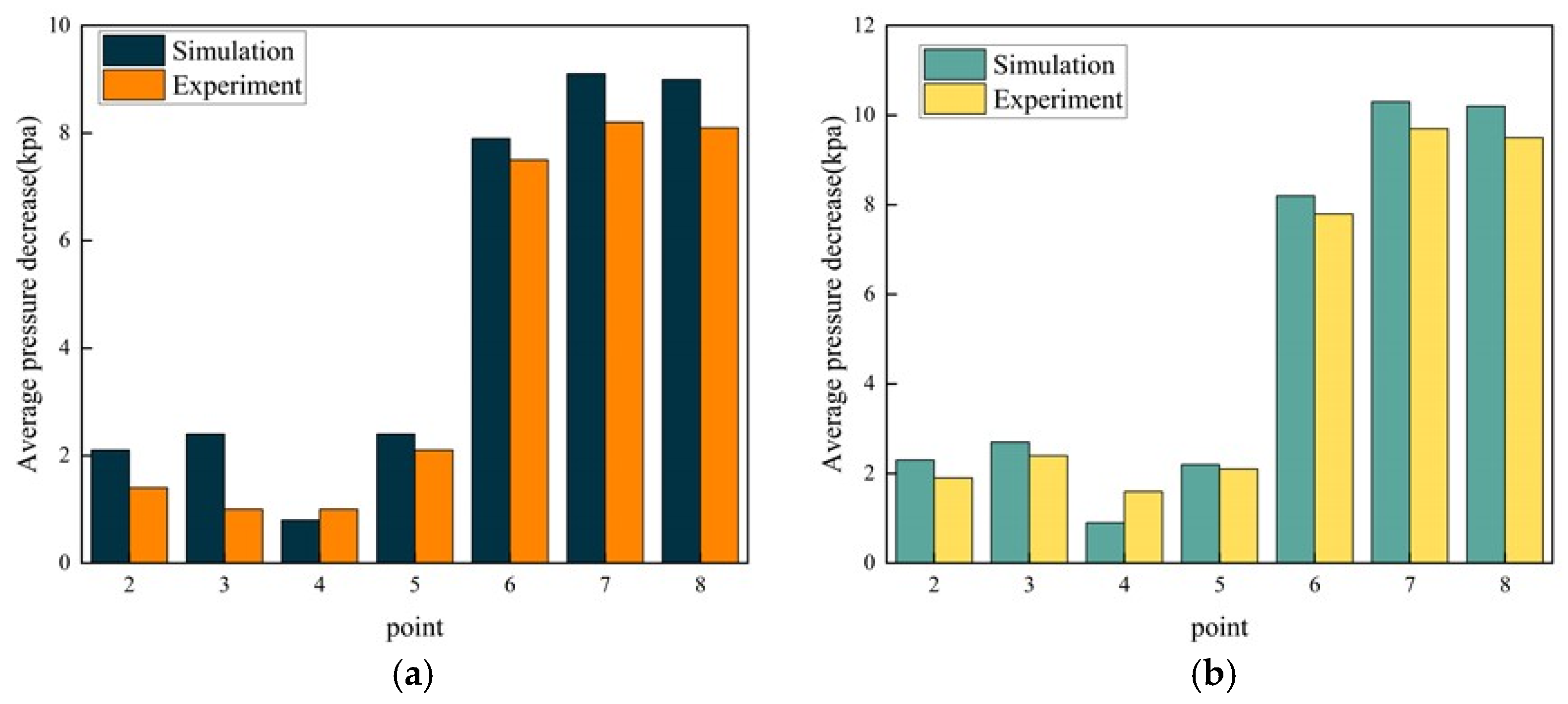
4.2.1. Pressure Fluctuations and Comparisons
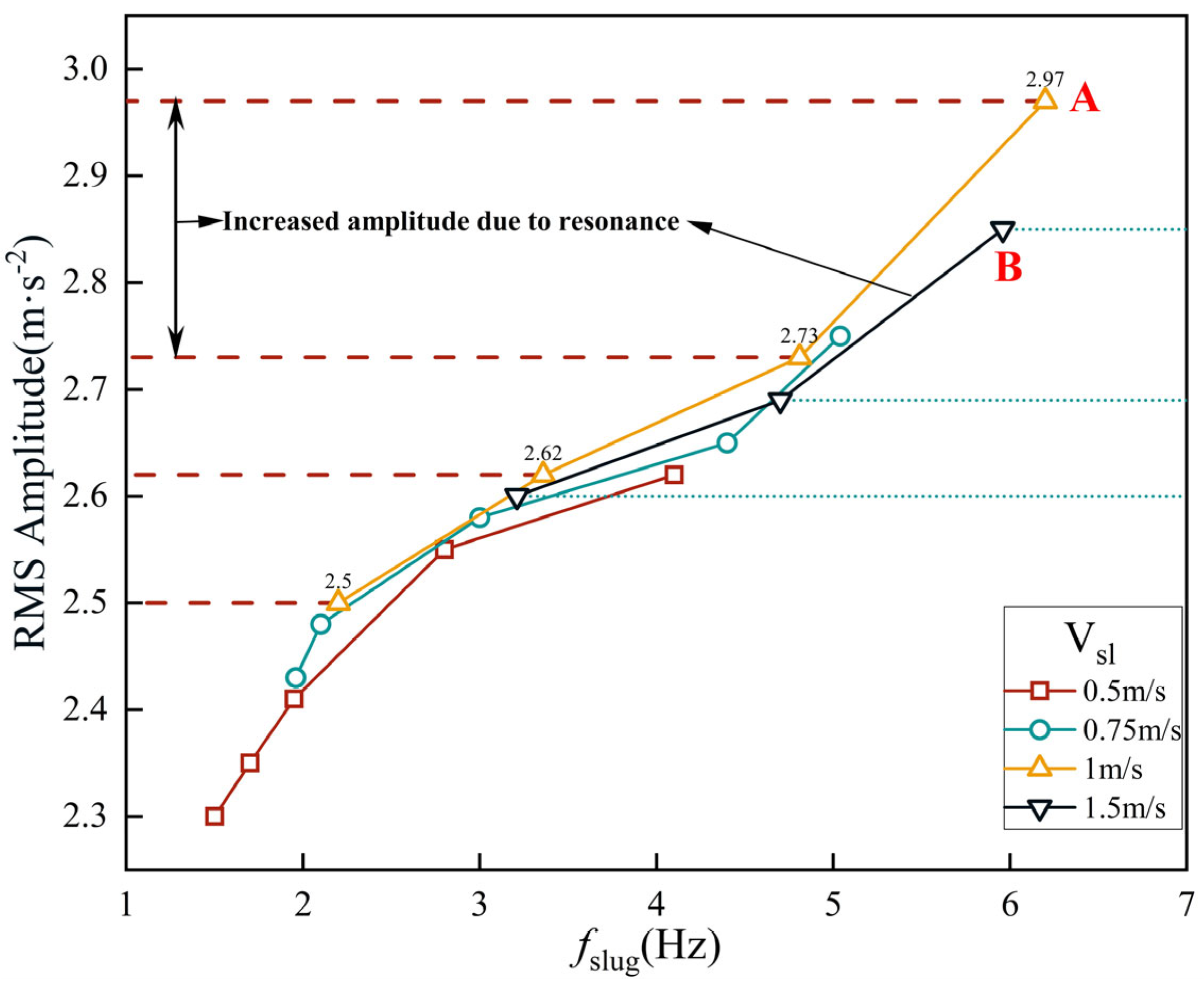
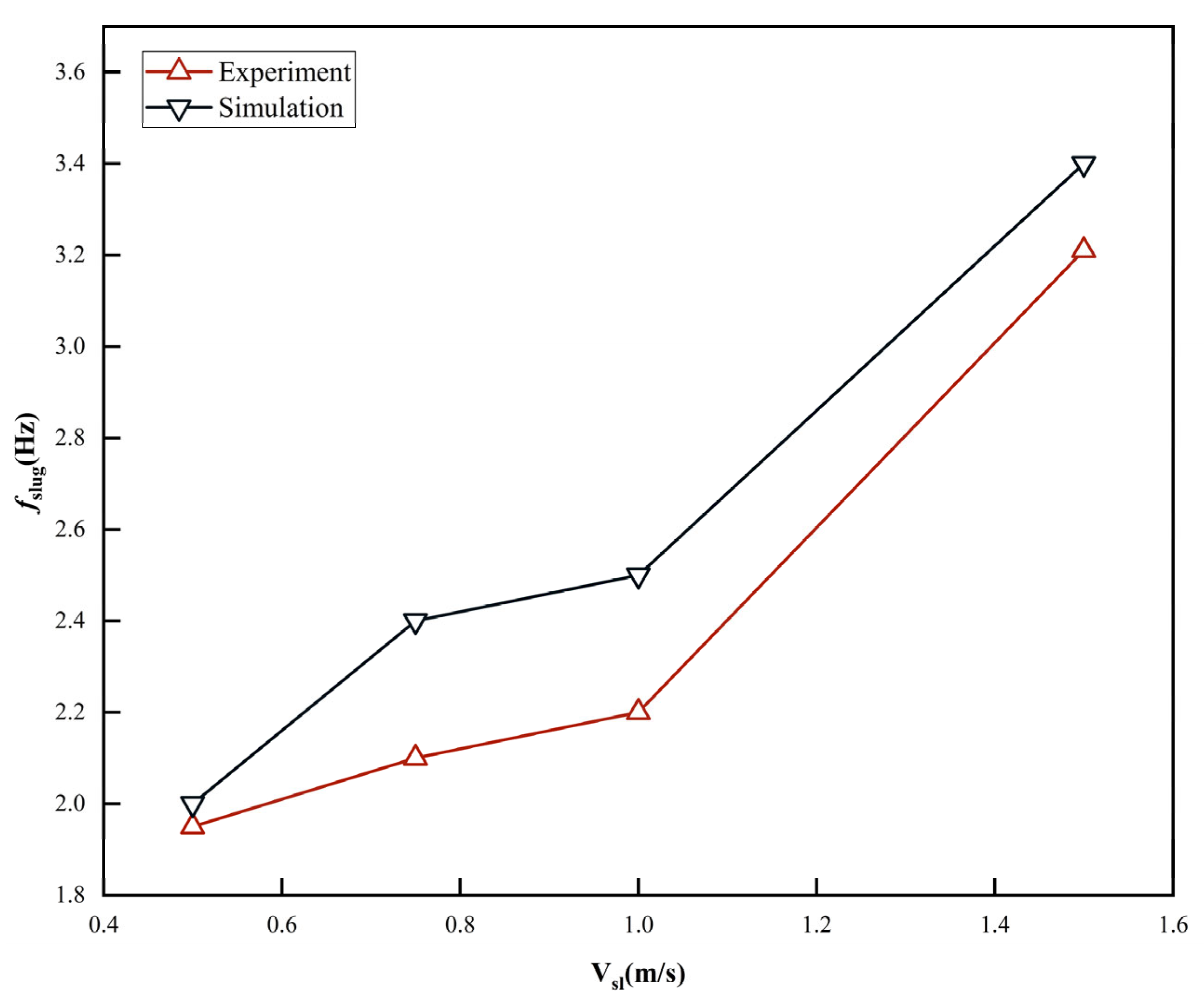
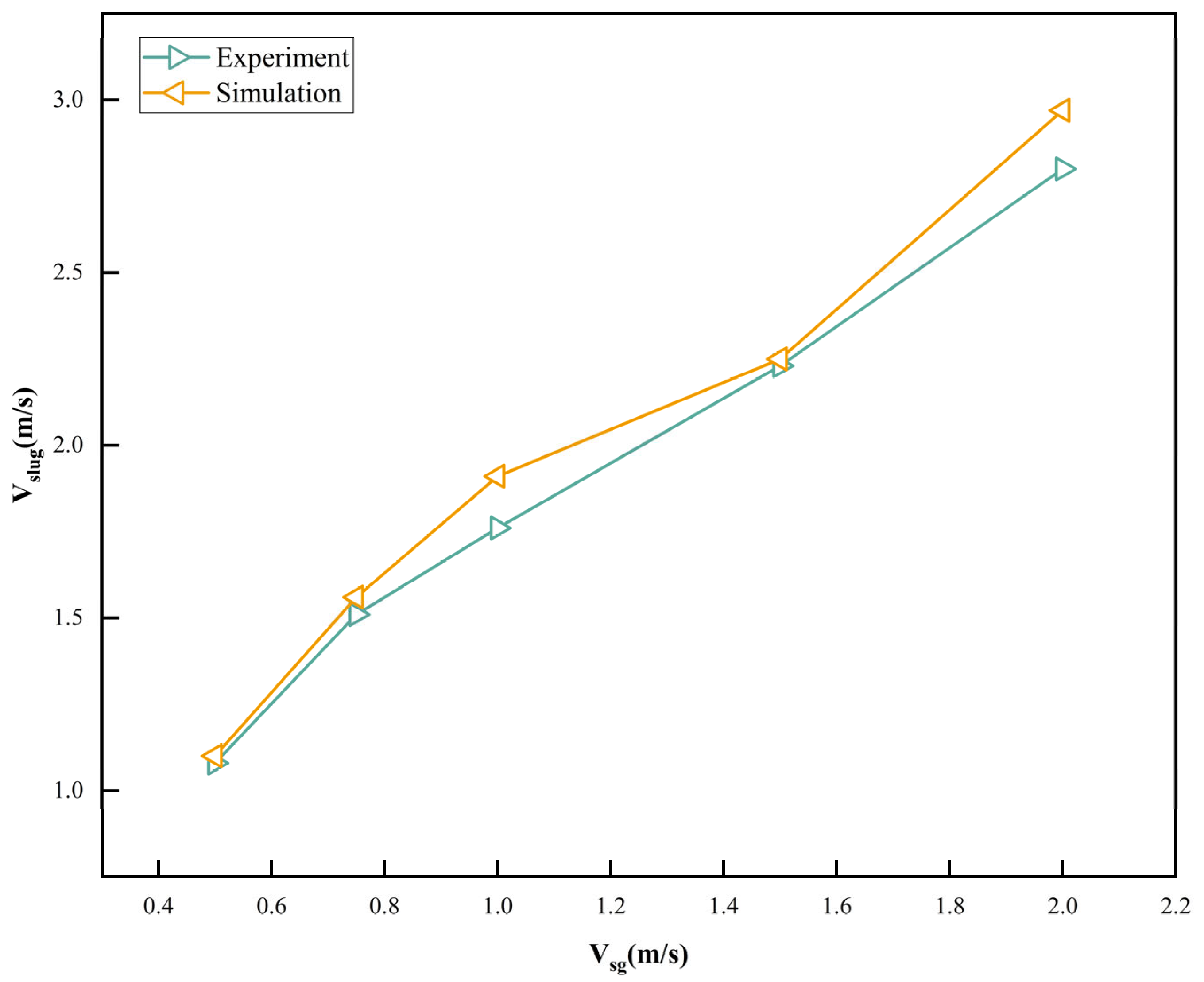
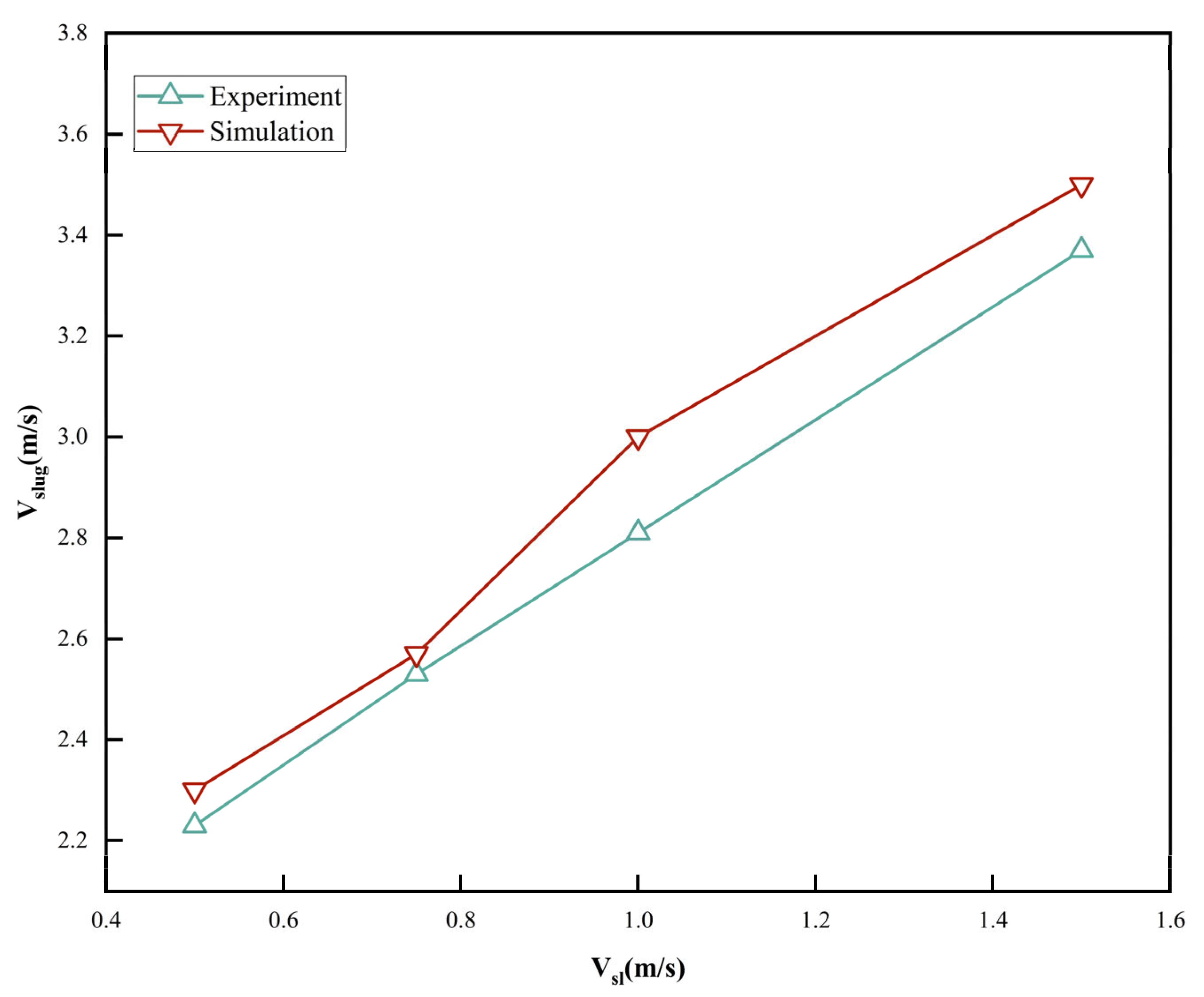
4.2.2. Effect on Vibration of Slug Flow Characteristics and Comparative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PLEM | Pipeline end manifold |
| HSE | Health and safety executive |
| CFD | Computational fluid dynamics |
| CSD | Computational structural dynamics |
| FEM | Finite element model |
| VOF | Volume of fluid |
| FSI | Fluid–structure interaction |
| FIV | Flow-induced vibration |
| PID | Proportional–integral–derivative |
| CSF | Continuous surface force |
| CFL | Courant–Friedrichs–Lewy |
| FFT | Fast Fourier transform |
| PSD | Power spectral density |
| RMS | Root mean square |
| TCP | Thermoplastic composite pipe |
| Nomenclature table with SI units. | ||
| Symbol | Unit | Meaning |
| kg/m3 | The density of air | |
| kg/m3 | The density of water | |
| kg/m·s | Dynamic viscosity of air | |
| kg/m·s | Dynamic viscosity of water | |
| m/s | The superficial liquid velocity | |
| m/s | The superficial gas velocity | |
| Void fraction | ||
| t/h | Liquid phase mass flow rate | |
| kg/h | Gas phase mass flow rate | |
| m/s | Gas–liquid mixing velocity | |
References
- Swindell, R. Hidden integrity threat looms in subsea pipework vibrations. Offshore, 1 September 2011; p. 71. [Google Scholar]
- Li, W.; Song, W.; Yin, G.; Ong, M.; Han, F. Flow regime identification in the subsea jumper based on electrical capacitance tomography and convolution neural network. Ocean. Eng. 2022, 266, 113152. [Google Scholar] [CrossRef]
- Bamidele, O.E.; Hassan, M.; Ahmed, W.H. Flow induced vibration of two-phase flow passing through orifices under slug pattern conditions. J. Fluids Struct. 2021, 101, 103209. [Google Scholar] [CrossRef]
- Mohmmed, A.O.; Al-Kayiem, H.H.; Osman, A.; Sabir, O. One-way coupled fluid–structure interaction of gas–liquid slug flow in a horizontal pipe: Experiments and simulations. J. Fluids Struct. 2020, 97, 103083. [Google Scholar] [CrossRef]
- Cabrera-Miranda, J.M.; Paik, J.K. Two-phase flow induced vibrations in a marine riser conveying a fluid with rectangular pulse train mass. Ocean. Eng. 2019, 174, 71–83. [Google Scholar] [CrossRef]
- Al-Hashimy, Z.; Al-Kayiem, H.; Time, R. Experimental investigation on the vibration induced by slug flow in horizontal pipe. ARPN J. Eng. Appl. Sci. 2016, 11, 12134–12139. [Google Scholar]
- Hong-jun, Z.; Hong-lei, Z.; Yue, G. Experimental Investigation of Vibration Response of a Free-Hanging Flexible Riser Induced by Internal Gas-Liquid Slug Flow. China Ocean. Eng. 2018, 32, 633–645. [Google Scholar]
- Dinaryanto, O.; Prayitno, Y.A.K.; Majid, A.I.; Hudaya, A.Z.; Nusirwan, Y.A.; Widyaparaga, A. Experimental investigation on the initiation and flow development of gas-liquid slug two-phase flow in a horizontal pipe. Exp. Therm. Fluid Sci. 2017, 81, 93–108. [Google Scholar] [CrossRef]
- Yaseen, M.; Garia, R.; Rawat, S.K.; Kumar, M. Hybrid nanofluid flow over a vertical flat plate with Marangoni convection in the presence of quadratic thermal radiation and exponential heat source. Int. J. Ambient. Energy 2022, 44, 527–541. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, P.; Li, X.; Li, Z.; Zhang, Q.; Bian, J. Experimental and numerical study on the flow characteristics of slug flow in a horizontal elbow. J. Pipeline Sci. Eng. 2022, 2, 100076. [Google Scholar] [CrossRef]
- Yaseen, M.; Rawat, S.K.; Shah, N.A.; Kumar, M.; Eldin, S.M. Ternary hybrid nanofluid flow containing gyrotactic microorganisms over three different geometries with Cattaneo–Christov model. Mathematics 2023, 11, 1237. [Google Scholar] [CrossRef]
- Shi, S.; Han, G.; Zhong, Z.; Li, Z. Experimental and Simulation Studies on the Slug Flow in Curve Pipes. ACS Omega 2021, 6, 19458–19470. [Google Scholar] [CrossRef]
- Zahedi, R.; Rad, A.B. Numerical and experimental simulation of gas-liquid two-phase flow in 90-degree elbow. Alex. Eng. J. 2022, 61, 2536–2550. [Google Scholar] [CrossRef]
- Wang, Z.-W.; He, Y.-P.; Li, M.-Z.; Qiu, M.; Huang, C.; Liu, Y.-D.; Wang, Z. Fluid—Structure Interaction of Two-Phase Flow Passing Through 90° Pipe Bend Under Slug Pattern Conditions. China Ocean. Eng. 2021, 35, 914–923. [Google Scholar] [CrossRef]
- Liu, Y.; Miwa, S.; Hibiki, T.; Ishii, M.; Morita, H.; Kondoh, Y.; Tanimoto, K. Experimental study of internal two-phase flow induced fluctuating force on a 90 elbow. Chem. Eng. Sci. 2012, 76, 173–187. [Google Scholar] [CrossRef]
- Bamidele, O.E.; Ahmed, W.H.; Hassan, M. Characterizing two-phase flow-induced vibration in piping structures with U-bends. Int. J. Multiph. Flow 2022, 151, 104042. [Google Scholar] [CrossRef]
- Chica, L.; Pascali, R.; Jukes, P.; Ozturk, B.; Gamino, M.; Smith, K. Jumper analysis with interacting internal Two-phase flow. In Proceedings of the The Twenty-Second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Van Der Heijden, B.; Smienk, H.; Metrikine, A.V. Fatigue analysis of subsea jumpers due to slug flow. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V06AT04A008. [Google Scholar]
- Voronkov, O.; Mueller, A.; Read, A.; Goodwin, S.A. Using Simulation to Assess the Fatigue Life of Subsea Jumpers. In Discover Better Designs, Faster—Multidisciplinary Simulation and Design Exploration in the Oil and Gas Industry; Siemens AG: Munich, Germany, 2015. [Google Scholar]
- Jia, D. Slug flow induced vibration in a pipeline span, a jumper and a riser section. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar]
- Nair, A.; Chauvet, C.; Whooley, A.; Eltaher, A.; Jukes, P. Flow induced forces on multi-planar rigid jumper systems. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 687–692. [Google Scholar]
- Pontaza, J.P.; Menon, R.G. Flow-induced vibrations of subsea jumpers due to internal multi-phase flow. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 585–595. [Google Scholar]
- Pontaza, J.P. A Frequency-Domain Screening Methodology for Flow-Induced Vibration in Piping. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Cancún, Mexico, 5–6 April 2021; p. V008T008A018. [Google Scholar]
- Kim, J.; Srinil, N. 3-D numerical simulations of subsea jumper transporting intermittent slug flows. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Madrid, Spain, 17–22 June 2018; p. V002T008A028. [Google Scholar]
- Le Prin, K.; Minguez, M.; Liné, A. Slug Induced Vibrations Modelling. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2019. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Hossain, M.; Chinenye-Kanu, N.M.; Droubi, G.M.; Islam, S.Z. Investigation of slug-churn flow induced transient excitation forces at pipe bend. J. Fluids Struct. 2019, 91, 102733. [Google Scholar] [CrossRef]
- Nichols, B.; Hirt, C. Methods for calculating multidimensional, transient free surface flows past bodies. In Proceedings of the First International Conference on Numerical Ship Hydrodynamics, Gaithersburg, MA, USA, 20–22 October 1975. [Google Scholar]
- Qiao, S.; Kim, S. Air-water two-phase bubbly flow across 90 vertical elbows. Part I: Experiment. Int. J. Heat Mass Transf. 2018, 123, 1221–1237. [Google Scholar] [CrossRef]
- Launder, B.E.; Sharma, B.I. Application of the energy-dissipation model of turbulence to the calculation of flow near a spinning disc. Lett. Heat Mass Transf. 1974, 1, 131–137. [Google Scholar] [CrossRef]
- Li, W.; Zhou, Q.; Yin, G.; Ong, M.C.; Li, G.; Han, F. Experimental Investigation and Numerical Modeling of Two-Phase Flow Development and Flow-Induced Vibration of a Multi-Plane Subsea Jumper. J. Mar. Sci. Eng. 2022, 10, 1334. [Google Scholar] [CrossRef]
- Kaichiro, M.; Ishii, M. Flow regime transition criteria for upward two-phase flow in vertical tubes. Int. J. Heat Mass Transf. 1984, 27, 723–737. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values | Dimension |
|---|---|---|
| Total length | 3.6 | m |
| Inner diameter | 0.048 | m |
| Wall thickness | 0.004 | m |
| Curvature radius | 1.5 D | |
| Transparent section length | 0.23 | m |
| Density | 7850 | kg/m3 |
| Poisson’s ratio | 0.3 | |
| Young’s modulus | 2.06 × 105 | MPa |
| Surface Tension Coefficient | ||||
|---|---|---|---|---|
| (kg/m3) | (kg/m3) | (kg/m·s) | (kg/m·s) | (N/m) |
| 1.29 | 998.2 | 1.8 × 10−5 | 1.0 × 10−3 | 0.072 |
| Mode | (Hz) | (Hz) |
|---|---|---|
| 1 | 7.44 | 5.89 |
| 2 | 10.39 | 7.56 |
| 3 | 12.58 | 9.42 |
| 4 | 16.68 | 13.67 |
| 5 | 16.97 | 14.78 |
| 6 | 19.11 | 18.23 |
| Case No. | (m/s) | (m/s) | (t/h) | (kg/h) | |
|---|---|---|---|---|---|
| 1 | 0.5 | 0.5 | 0.5 | 3.25 | 4.2 |
| 2 | 0.5 | 0.75 | 0.6 | 3.25 | 6.3 |
| 3 | 0.5 | 1 | 0.67 | 3.25 | 8.4 |
| 4 | 0.5 | 1.5 | 0.75 | 3.25 | 12.6 |
| 5 | 0.5 | 2 | 0.8 | 3.25 | 16.8 |
| 6 | 0.75 | 0.75 | 0.5 | 4.9 | 6.3 |
| 7 | 0.75 | 1 | 0.6 | 4.9 | 8.4 |
| 8 | 0.75 | 1.5 | 0.67 | 4.9 | 12.6 |
| 9 | 0.75 | 2 | 0.75 | 4.9 | 16.8 |
| 10 | 0.75 | 2.5 | 0.8 | 4.9 | 21 |
| 11 | 1 | 1 | 0.5 | 6.5 | 8.4 |
| 12 | 1 | 1.5 | 0.6 | 6.5 | 12.6 |
| 13 | 1 | 2 | 0.67 | 6.5 | 16.8 |
| 14 | 1 | 2.5 | 0.7 | 6.5 | 21 |
| 15 | 1.5 | 1 | 0.4 | 9.75 | 8.4 |
| 16 | 1.5 | 1.5 | 0.5 | 9.75 | 12.6 |
| 17 | 1.5 | 2 | 0.6 | 9.75 | 16.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, J.; Yin, G.; Ong, M.C. Experimental and Numerical Study on the Slug Characteristics and Flow-Induced Vibration of a Subsea Rigid M-Shaped Jumper. Appl. Sci. 2023, 13, 7504. https://doi.org/10.3390/app13137504
Li W, Li J, Yin G, Ong MC. Experimental and Numerical Study on the Slug Characteristics and Flow-Induced Vibration of a Subsea Rigid M-Shaped Jumper. Applied Sciences. 2023; 13(13):7504. https://doi.org/10.3390/app13137504
Chicago/Turabian StyleLi, Wenhua, Jiahao Li, Guang Yin, and Muk Chen Ong. 2023. "Experimental and Numerical Study on the Slug Characteristics and Flow-Induced Vibration of a Subsea Rigid M-Shaped Jumper" Applied Sciences 13, no. 13: 7504. https://doi.org/10.3390/app13137504
APA StyleLi, W., Li, J., Yin, G., & Ong, M. C. (2023). Experimental and Numerical Study on the Slug Characteristics and Flow-Induced Vibration of a Subsea Rigid M-Shaped Jumper. Applied Sciences, 13(13), 7504. https://doi.org/10.3390/app13137504