
An Attention-Based CNN-LSTM Method for Effluent Wastewater Quality Prediction

Abstract
:1. Introduction
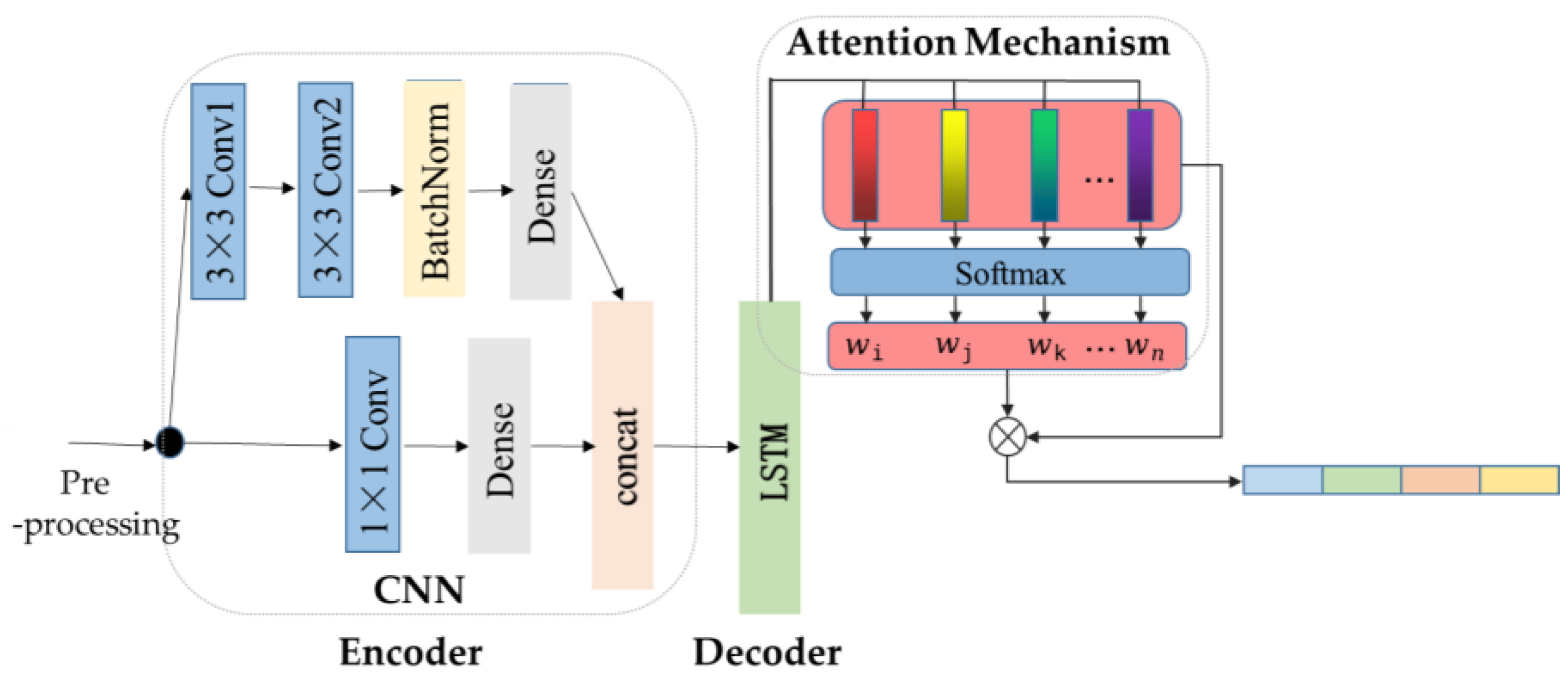
- A hybrid model for effluent wastewater quality prediction that uses a CNN as an encoder and an LSTM as a decoder.
- An attention mechanism to extract the correlation between the wastewater quality data at the adjacent sampling time.
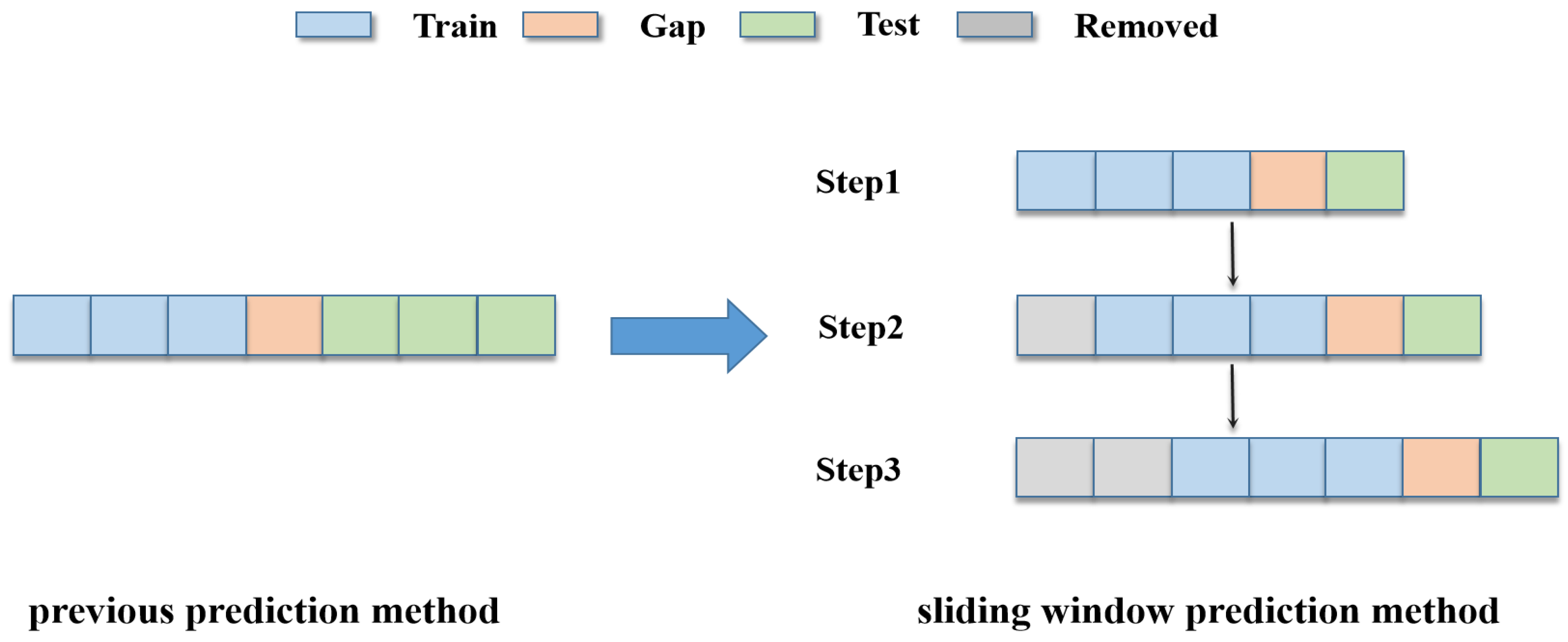
- A sliding window method that supports dynamic updating and can meet the actual use requirements of real-world wastewater treatment plants.
2. Theoretical Background
2.1. Convolutional Neural Network
2.2. Long Short-Term Memory
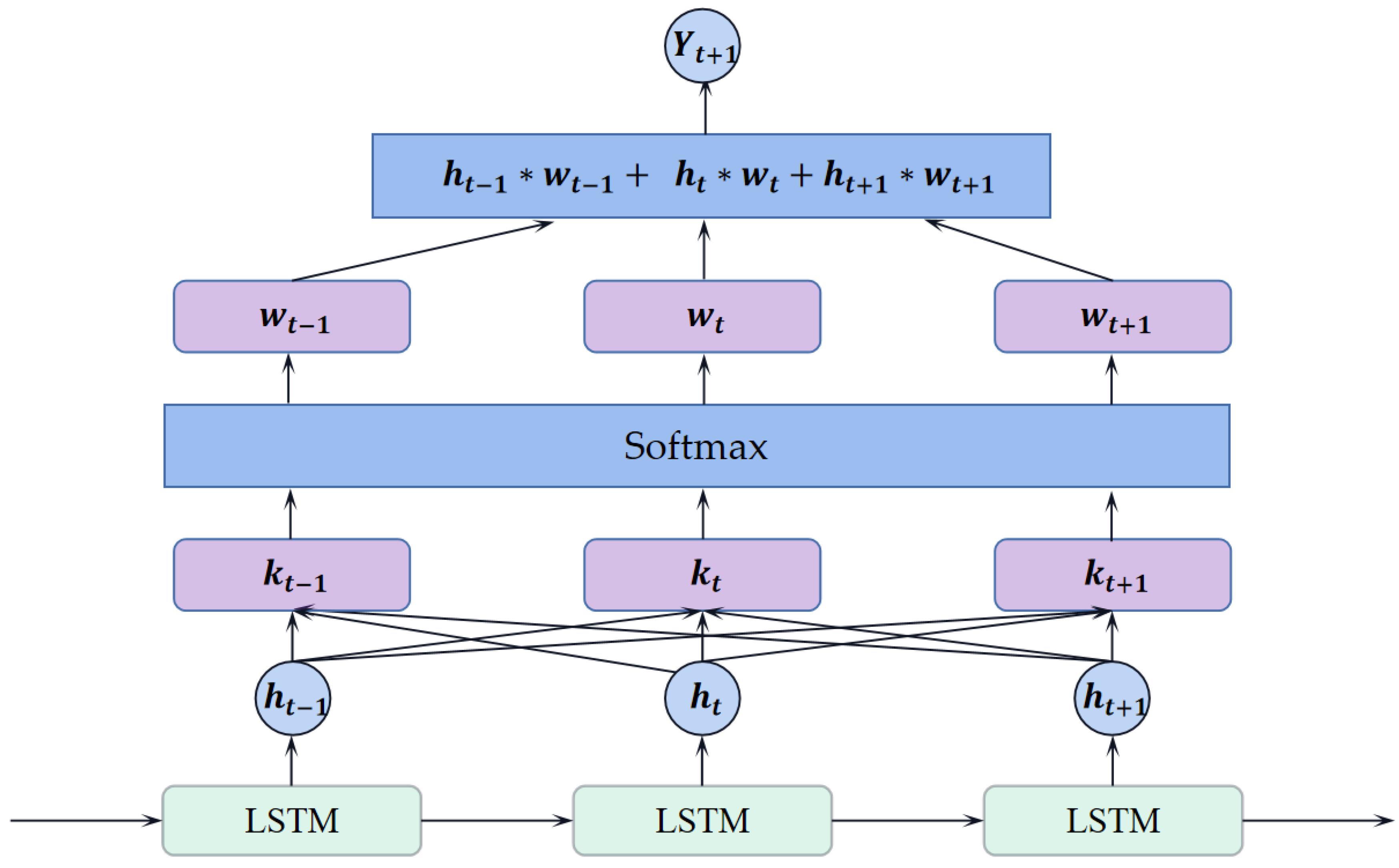
2.3. Attention Mechanism
3. Proposed Method
3.1. Preprocessing Method
3.1.1. Processing of Abnormal Samples
- (1)
- The distorted data are deleted. The deletion of distorted data is the most common method in data preprocessing. Wastewater quality belongs to a time series, and data at adjacent sampling times have a strong correlation. After deletion, the correlation is damaged, thus increasing the difficulty of prediction. Therefore, the interpolation method is adopted to maintain the correlation between adjacent sampling data.
- (2)
- The previous sampling data are selected for filling. This method is a commonly used method in real production. When filling multiple continuous data, this method will cause multiple duplicate values, which is one cause of the distorted data we identified. Therefore, the interpolation method is used to prevent the occurrence of multiple duplicate values.
3.1.2. Data Standardization
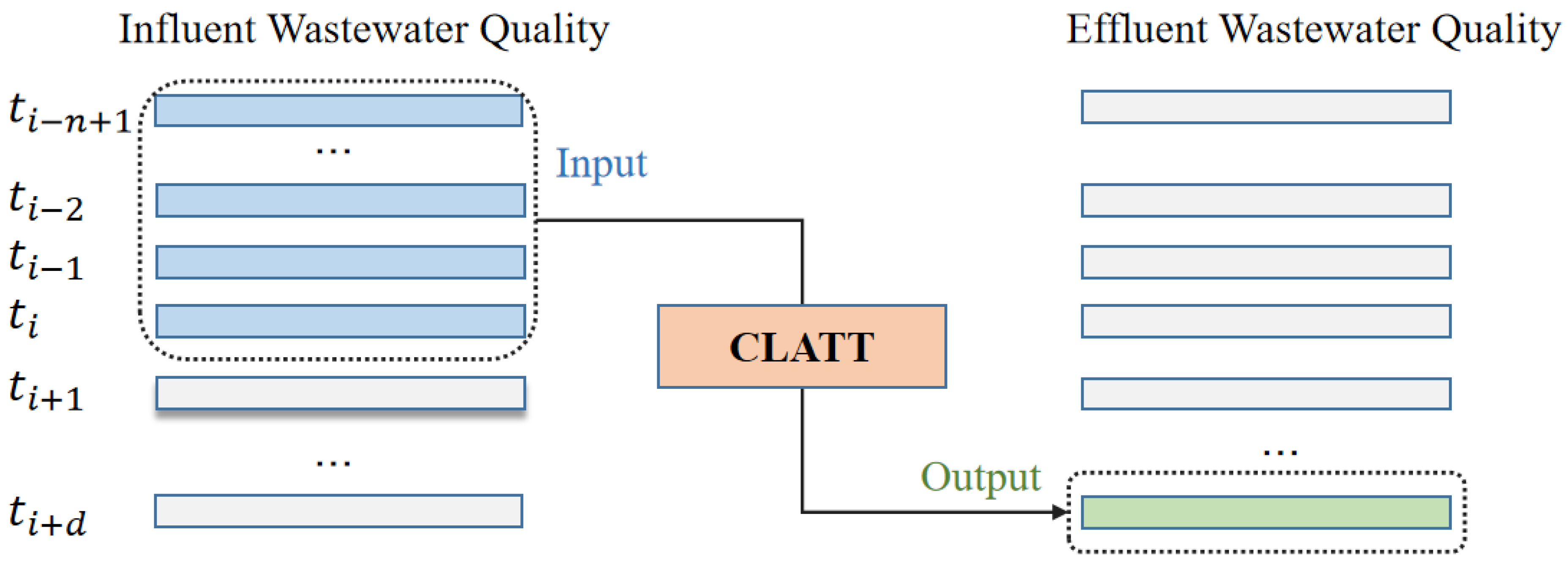
3.2. The Input and Output of the Model
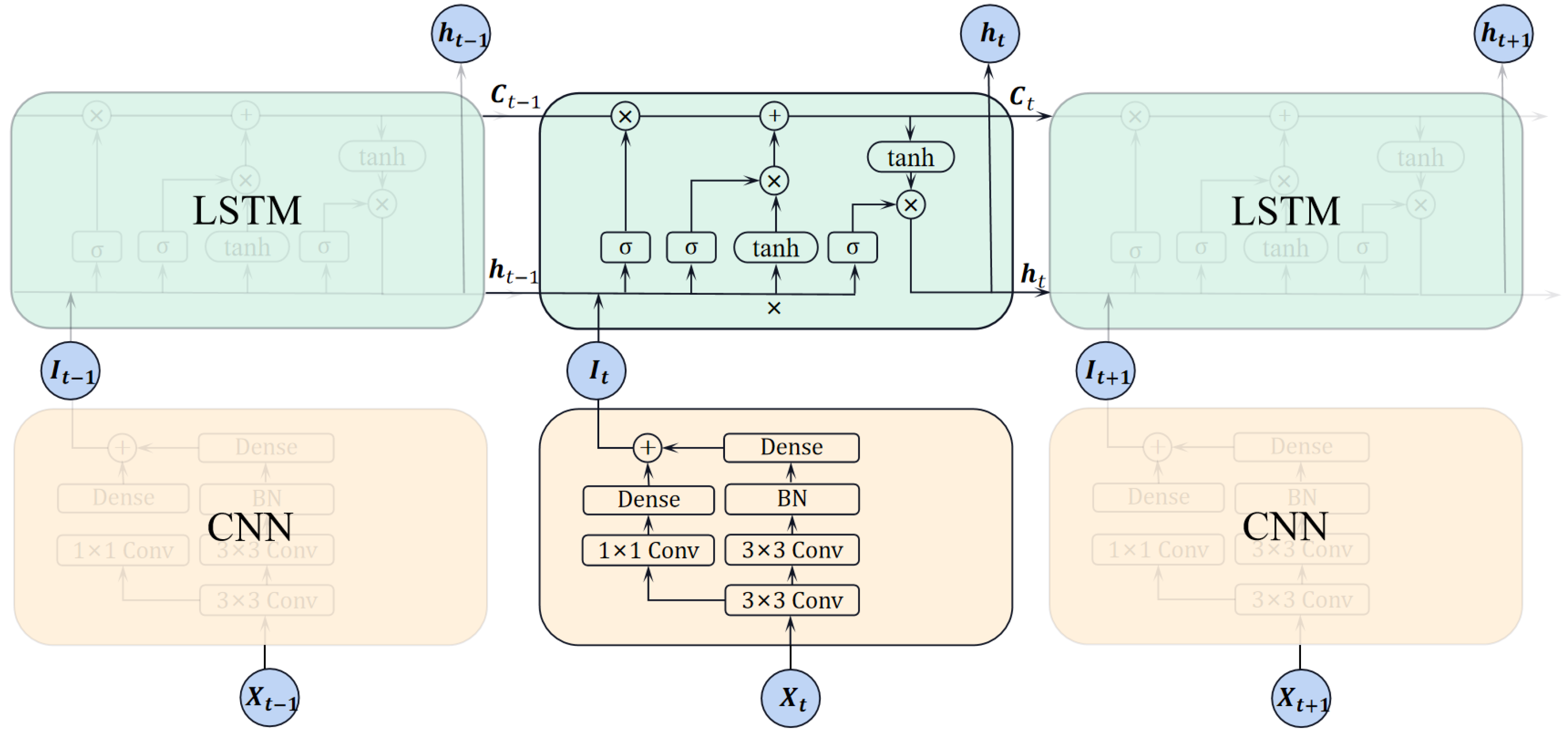
3.3. Encoder–Decoder
3.4. Attention Mechanism
4. Experiments
4.1. Datasets
4.2. Baselines and Evaluation Indicators
4.2.1. Baselines
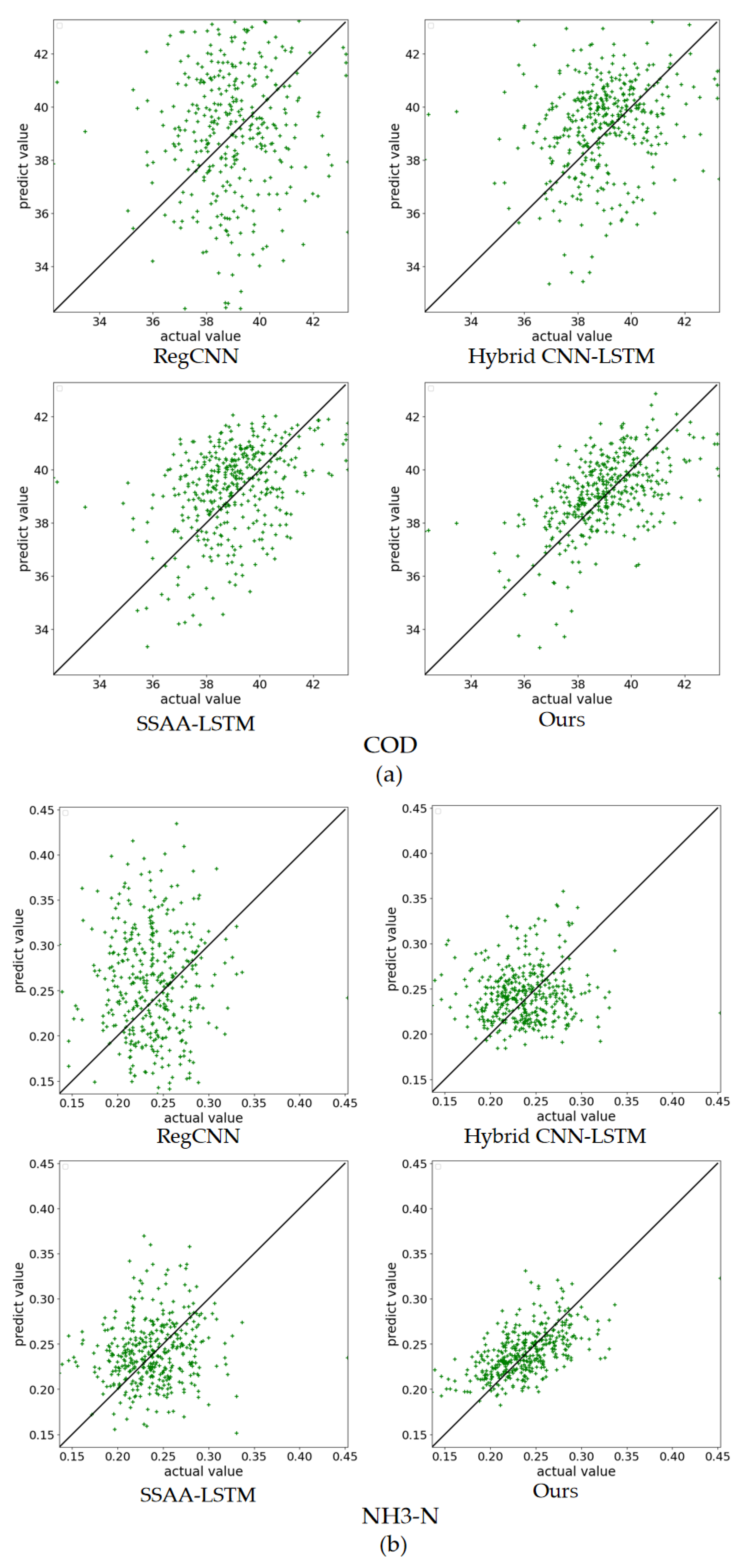
- Reg-CNN [9], based on a CNN, is used to solve multi-output regression problems and is adopted to predict effluent wastewater indicators.
- CNN-LSTM hybrid [24] is a multi-scale CNN-LSTM hybrid neural network used to make predictions in electricity load forecasting, similar to the use of the hybrid model in our method.
- SSAA-LSTM [13] is a long short-term memory network water quality prediction model based on SSA and an attention mechanism, similar to the use of an attention mechanism in our method.
4.2.2. Evaluation Indicators
- In each experiment, the three standard evaluation indicators were the Mean Square Error (MSE), Mean Absolute Percent Error (MAPE) and Limit Error Ratio (LER). MSE and MAPE were calculated as follows:
4.3. Experimental Results
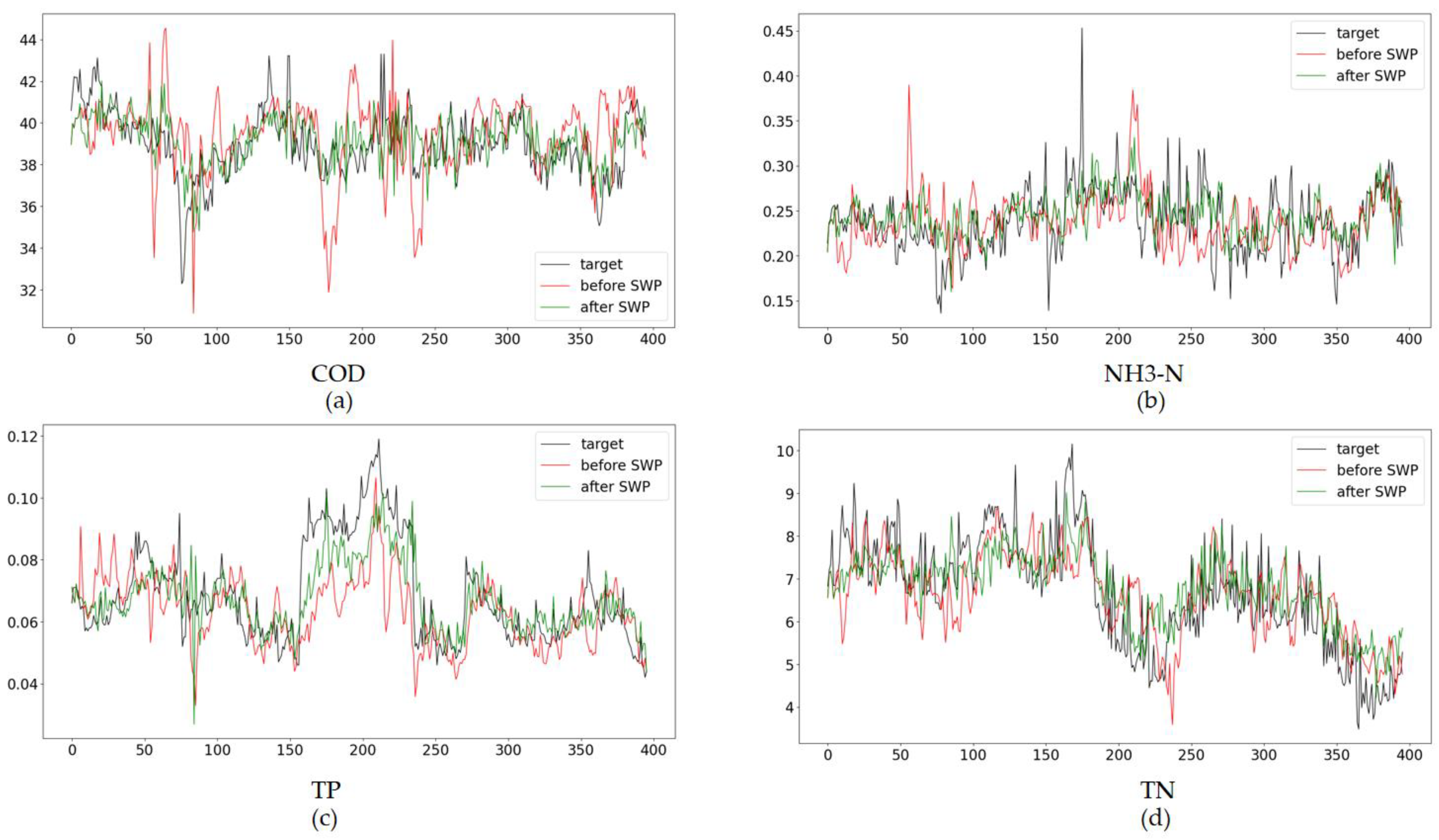
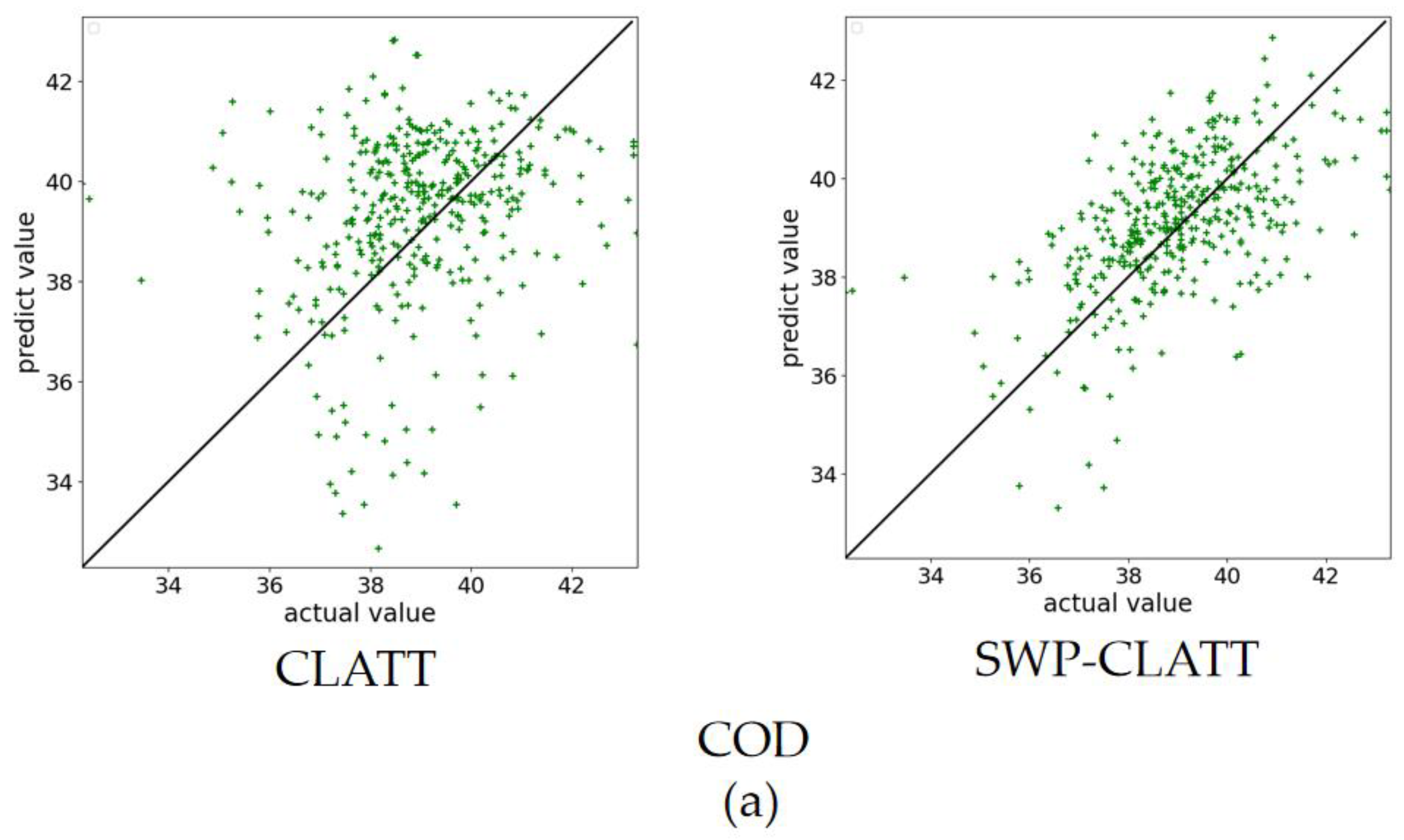
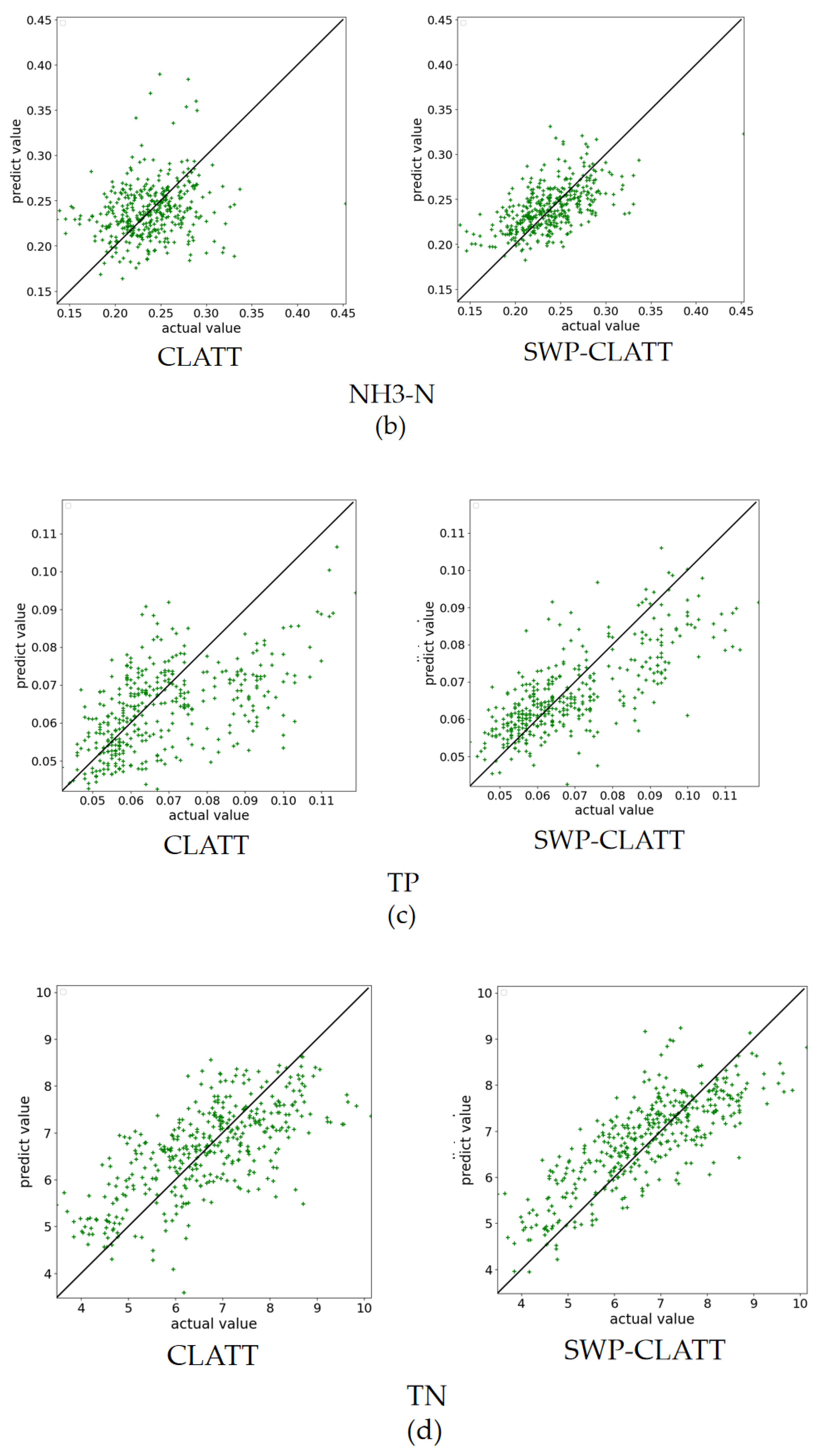
4.3.1. Comparison with Sliding Window Method
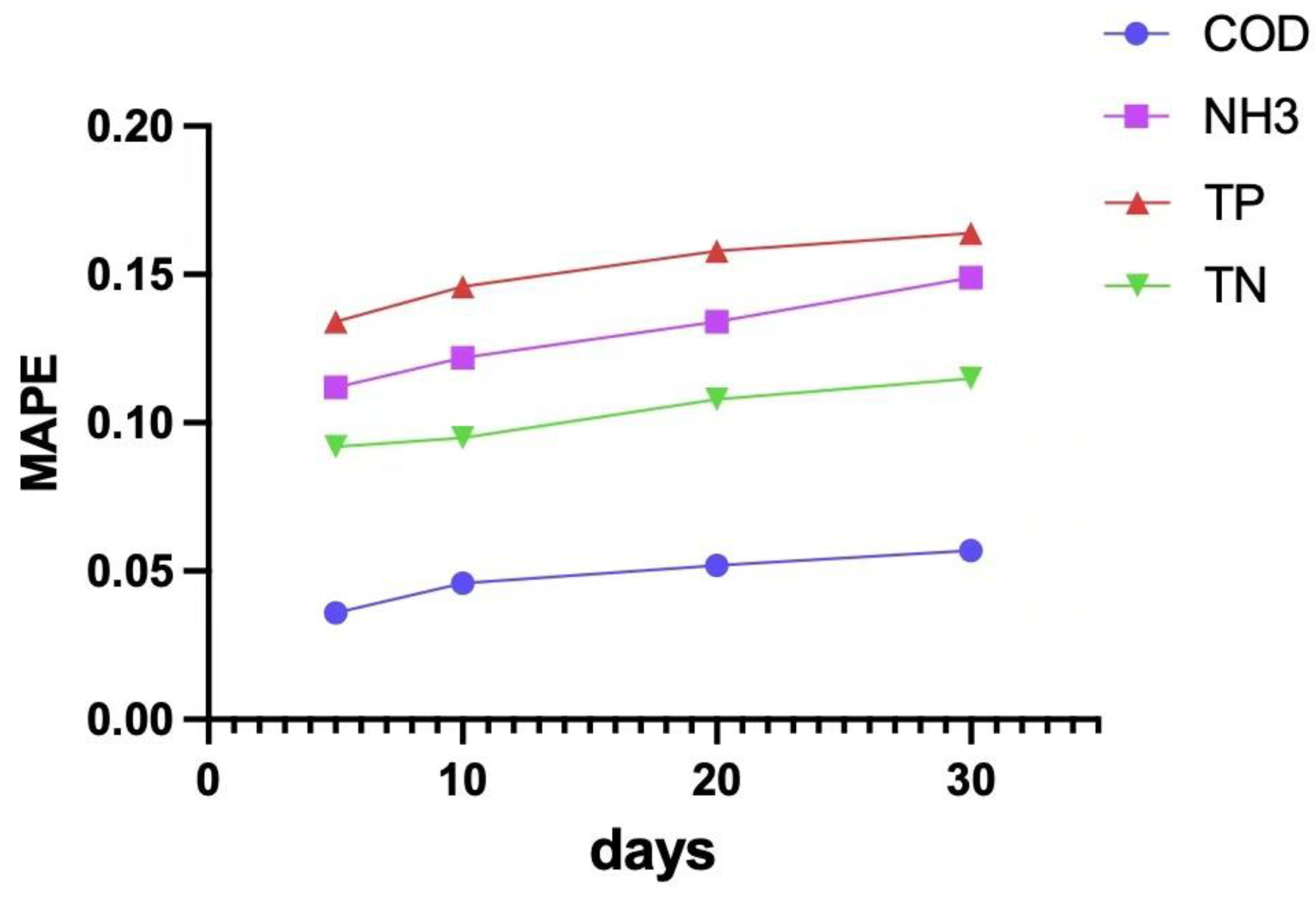
- In the daily operation of WWTPs, the effluent wastewater quality prediction model should meet the requirement of supporting dynamic updating; that is, the model will constantly update the parameters with changing time. The sliding window method simulates the dynamic updating and incremental training of the model; when a batch of new data is obtained from the WWTPs, the model is dynamically updated to improve the accuracy of the predicted results.
- Data augmentation refers to the technology of generating new training data by transforming or combining existing data. The sliding window method can also be regarded as the “data augmentation” of the datasets, which makes it easier for the model to capture the rules in the data and prevent the model from overfitting a certain section of data.
4.3.2. Ablation Study
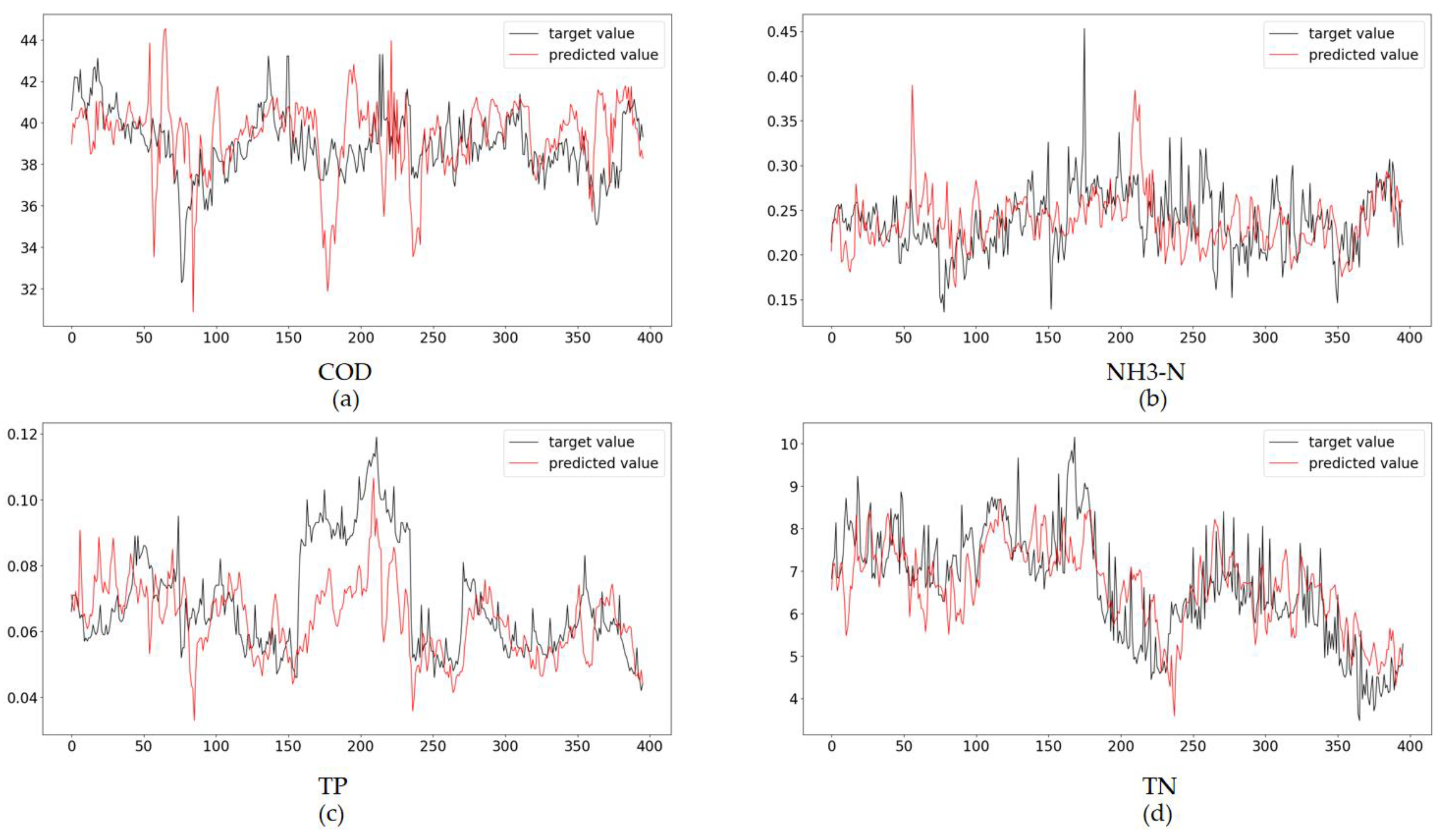
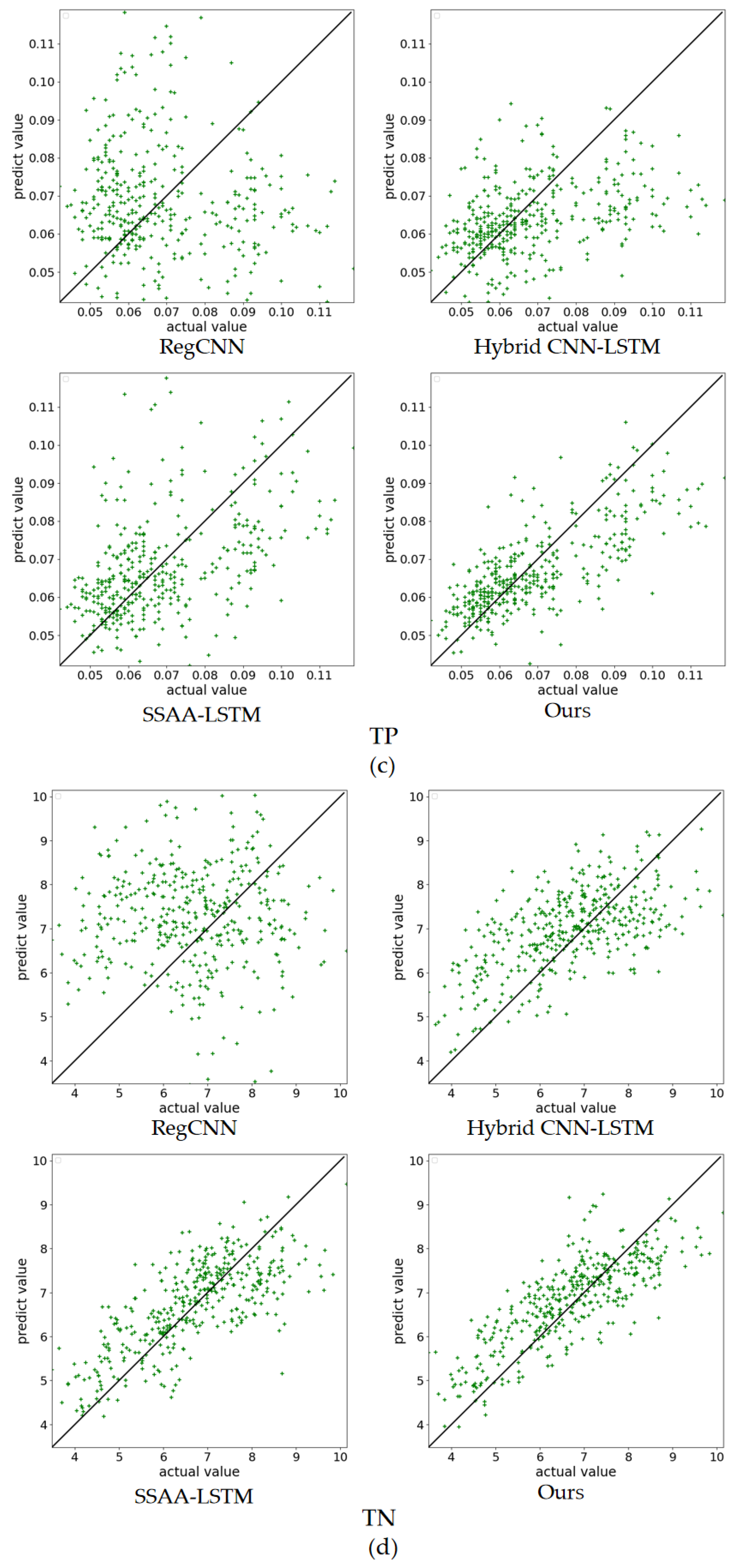
4.3.3. Comparison with Other Methods
5. Conclusions
- Improving the generalization performance of the model. The proposed method in this paper is mainly used for the data of municipal WWTPs. However, in practical application, the wastewater quality condition of WWTPs varies with different water sources. For example, the COD of chemical wastewater is higher than that of municipal wastewater. Different water quality conditions will affect the prediction performance of the method. The method proposed in this paper may not be suitable for use in WWTPs from other water sources. Future work could consider building more general models to adapt to the data characteristics of different WWTPs and improve the generalization performance of the method.
- Adding the means of operation in WWTPs to the input of the model. The sampling information of WWTPs only includes the indicators of influent and effluent wastewater quality; it does not include the means of operation, such as the dosage of commonly used chemicals in WWTPs and the aeration capacity of the blower, which are also important factors affecting the quality of effluent wastewater. The proposed method in this paper is only based on the use of influent wastewater quality to predict effluent wastewater quality. In the future, the operation methods of WWTPs could be added to realize the prediction of effluent wastewater quality under the condition of complete data collection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Samuelssona, P.; Halvarsson, B.; Carlsson, B. Cost-efficient operation of a denitrifying activated sludge process. Water Res. 2007, 41, 2325–2332. [Google Scholar] [CrossRef] [PubMed]
- Coelho, M.A.Z.; Russo, C.; Araújo, O.Q.F. Optimization of a sequencing batch reactor for biological nitrogen removal. Water Res. 2000, 34, 2809–2817. [Google Scholar] [CrossRef]
- Gujer, W.; Henze, M.; Mino, T.; Van Loosdrecht, M. Activated sludge model no. 3. Water Sci. Technol. 1999, 39, 183–193. [Google Scholar] [CrossRef]
- Grau, P.; Beltrán, S.; De Gracia, M.; Ayesa, E. New mathematical procedure for the automatic estimation of influent characteristics in WWTPs. Water Sci. Technol. 2007, 56, 95–106. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Kim, M.; Yoo, C. A new statistical framework for parameter subset selection and optimal parameter estimation in the activated sludge model. J. Hazard. Mater. 2010, 183, 441–447. [Google Scholar] [CrossRef] [PubMed]
- Pakrou, S.; Mehrdadi, N.; Baghvand, A. Artifificial neural networks modeling for predicting treatment effificiency and considering effects of input parameters in prediction accuracy: A case study in tabriz treatment plant. Indian J. Fundam. Appl. Life Sci. 2014, 4, 2231–6345. [Google Scholar]
- Nourani, V.; Elkiran, G.; Abba, S. Wastewater treatment plant performance analysis using artifificial intelligence—An ensemble approach. Water Sci. Technol. 2018, 78, 2064–2076. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Thunéll, S.; Lindberg, U.; Jiang, L.; Trygg, J.; Tysklind, M.; Souihi, N. A machine learning framework to improve effluent quality control in wastewater treatment plants. Sci. Total Environ. 2021, 784, 147138. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Ma, X.; Shi, P.; Bi, S.; Wang, C. RegCNN: A Deep Multi-output Regression Method for Wastewater Treatment. In Proceedings of the IEEE 31st International Conference on Tools with Artificial Intelligence (ICTAI), Portland, OR, USA, 4–6 November 2019; pp. 816–823. [Google Scholar]
- Li, X.; Yi, X.; Liu, Z.; Liu, H.; Chen, T.; Niu, G.; Yan, B.; Chen, C.; Huang, M.; Ying, G. Application of novel hybrid deep leaning model for cleaner production in a paper industrial wastewater treatment system. J. Clean. Prod. 2021, 294, 126343. [Google Scholar] [CrossRef]
- Jafar, R.; Awad, A.; Jafar, K.; Shahrour, I. Predicting Effluent Quality in Full-Scale Wastewater Treatment Plants Using Shallow and Deep Artificial Neural Networks. Sustainability 2022, 14, 15598. [Google Scholar] [CrossRef]
- Wan, X.; Li, X.; Wang, Z.; Yi, X.; Zhao, Y.; He, X.; Wu, R.; Huang, M. Water quality prediction model using Gaussian process regression based on deep learning for carbon neutrality in papermaking wastewater treatment system. Environ. Res. 2022, 211, 112942. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.F.; Wei, S.N.; Xu, L.X.; Pan, J.; Wu, Z.Z.; Kwong, T.C.; Tang, Y.Y. LSTM Wastewater Quality Prediction Based on Attention Mechanism. In Proceedings of the International Conference on Wavelet Analysis and Pattern Recognition (ICWAPR), Adelaide, Australia, 4–5 December 2021; pp. 1–6. [Google Scholar]
- Srinivasan, S.; Ravi, V.; Sowmya, V.; Krichen, M.; Noureddine, D.B.; Anivilla, S.; Soman, K.P. Deep Convolutional Neural Network Based Image Spam Classification. In Proceedings of the Conference on Data Science and Machine Learning Applications (CDMA), Riyadh, Saudi Arabia, 4–5 March 2020; pp. 112–117. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Tzirakis, P.; Zhang, J.; Schuller, B.W. End-to-End Speech Emotion Recognition Using Deep Neural Networks. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 5089–5093. [Google Scholar]
- Breuel, T.M. High-Performance Text Recognition Using a Hybrid Convolutional-LSTM Implementation. In Proceedings of the IAPR International Conference on Document Analysis and Recognition (ICDAR), Kyoto, Japan, 9–15 November 2017; pp. 11–16. [Google Scholar]
- Pielka, M.; Sifa, R.; Hillebrand, L.P.; Biesner, D.; Ramamurthy, R.; Ladi, A.; Bauckhage, C. Tackling Contradiction Detection in German Using Machine Translation and End-to-End Recurrent Neural Networks. In Proceedings of the International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 6696–6701. [Google Scholar]
- Zhu, J.; Zurcher, J.; Rao, M.; Meng, M.Q. An on-line wastewater quality prediction system based on a time-delay neural network. Eng. Appl. Artif. Intell. 1998, 11, 747–758. [Google Scholar] [CrossRef]
- Memarzadeh, G.; Keynia, F. Short-term electricity load and price forecasting by a new optimal LSTM-NN based prediction algorithm. Electr. Power Syst. Res. 2021, 192, 106995. [Google Scholar] [CrossRef]
- Mnih, V.; Heess, N.; Graves, A.; Kavukcuoglu, K. Recurrent models of visual attention. In Proceedings of the 27th International Conference on Neural Information Processing Systems—Volume 2 (NIPS’14); 2014; pp. 2204–2212. [Google Scholar]
- Tabelini, L.; Berriel, R.; Paixao, T.M.; Badue, C.; De Souza, A.F.; Oliveira-Santos, T. Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 294–302. [Google Scholar]
- Guo, X.; Zhao, Q.; Zheng, D.; Ning, Y.; Gao, Y. A short-term load forecasting model of multi-scale CNN-LSTM hybrid neural network considering the real-time electricity price. Energy Rep. 2020, 6, 1046–1053. [Google Scholar] [CrossRef]
- Huang, S.; Shen, J.; Lv, Q.; Zhou, Q.; Yong, B. A Novel NODE Approach Combined with LSTM for Short-Term Electricity Load Forecasting. Future Internet 2023, 15, 22. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | |
|---|---|
| Influent | Chemical Oxygen Demand (COD) |
| Ammonia Nitrogen (NH3-N) | |
| Total Phosphorus (TP) | |
| Total Nitrogen (TN) Water Flow Rate | |
| PH | |
| Effluent | COD |
| NH3-N | |
| TP | |
| TN | |
| Hyperparameter | Values |
|---|---|
| 3 × 3 Conv1-channel | 8 |
| 3 × 3 Conv2-channel | 8 |
| 1 × 1 Conv-channel | 3 |
| CNN-Dense | 32 |
| LSTM-hidden size | 64 |
| Epoch number | 200 |
| Learning rate | 0.0002 |
| Batch size | 64 |
| Optimizer | Adam |
| Method | MSE | MAPE (%) | LER (%) |
|---|---|---|---|
| CLATT | 1.17 | 0.13 | 0.18 |
| SWP-CLATT | 0.92 | 0.08 | 0.11 |
| Model | MSE | MAPE (%) | LER (%) |
|---|---|---|---|
| CLATT | 0.92 | 0.08 | 0.11 |
| -CNN | 1.30 | 0.17 | 0.18 |
| -LSTM | 1.25 | 0.15 | 0.16 |
| -Attention | 1.01 | 0.10 | 0.12 |
| Model | MSE | MAPE (%) | LER (%) |
|---|---|---|---|
| CLATT | 0.92 | 0.08 | 0.11 |
| -residual block | 1.35 | 0.19 | 0.19 |
| -BN layer | 1.03 | 0.11 | 0.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Kong, B.; Yu, W.; Zhu, X. An Attention-Based CNN-LSTM Method for Effluent Wastewater Quality Prediction. Appl. Sci. 2023, 13, 7011. https://doi.org/10.3390/app13127011
Li Y, Kong B, Yu W, Zhu X. An Attention-Based CNN-LSTM Method for Effluent Wastewater Quality Prediction. Applied Sciences. 2023; 13(12):7011. https://doi.org/10.3390/app13127011
Chicago/Turabian StyleLi, Yue, Bin Kong, Weiwei Yu, and Xingliang Zhu. 2023. "An Attention-Based CNN-LSTM Method for Effluent Wastewater Quality Prediction" Applied Sciences 13, no. 12: 7011. https://doi.org/10.3390/app13127011
APA StyleLi, Y., Kong, B., Yu, W., & Zhu, X. (2023). An Attention-Based CNN-LSTM Method for Effluent Wastewater Quality Prediction. Applied Sciences, 13(12), 7011. https://doi.org/10.3390/app13127011