
Dynamic Analysis on the Parametric Resonance of the Tower–Multicable–Beam Coupled System


Abstract
:1. Introduction
2. The Dynamic Model of the MCS
2.1. The Vibration Equations of the Tower and the Cable
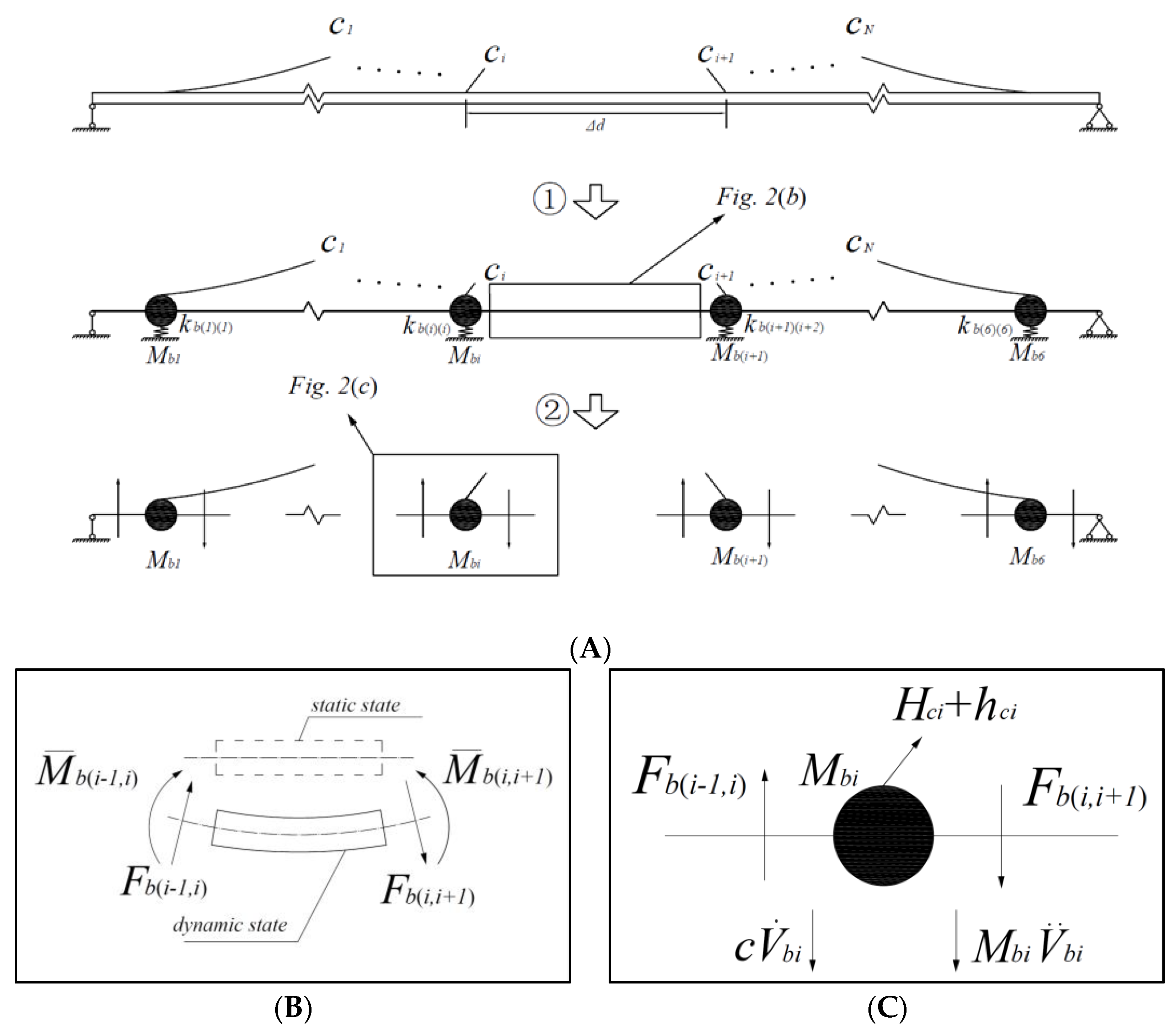
2.2. The Reduced Model of the Beam Considering the CEB
3. The Mathematical Model of the MCS
3.1. The Equations of the MCS
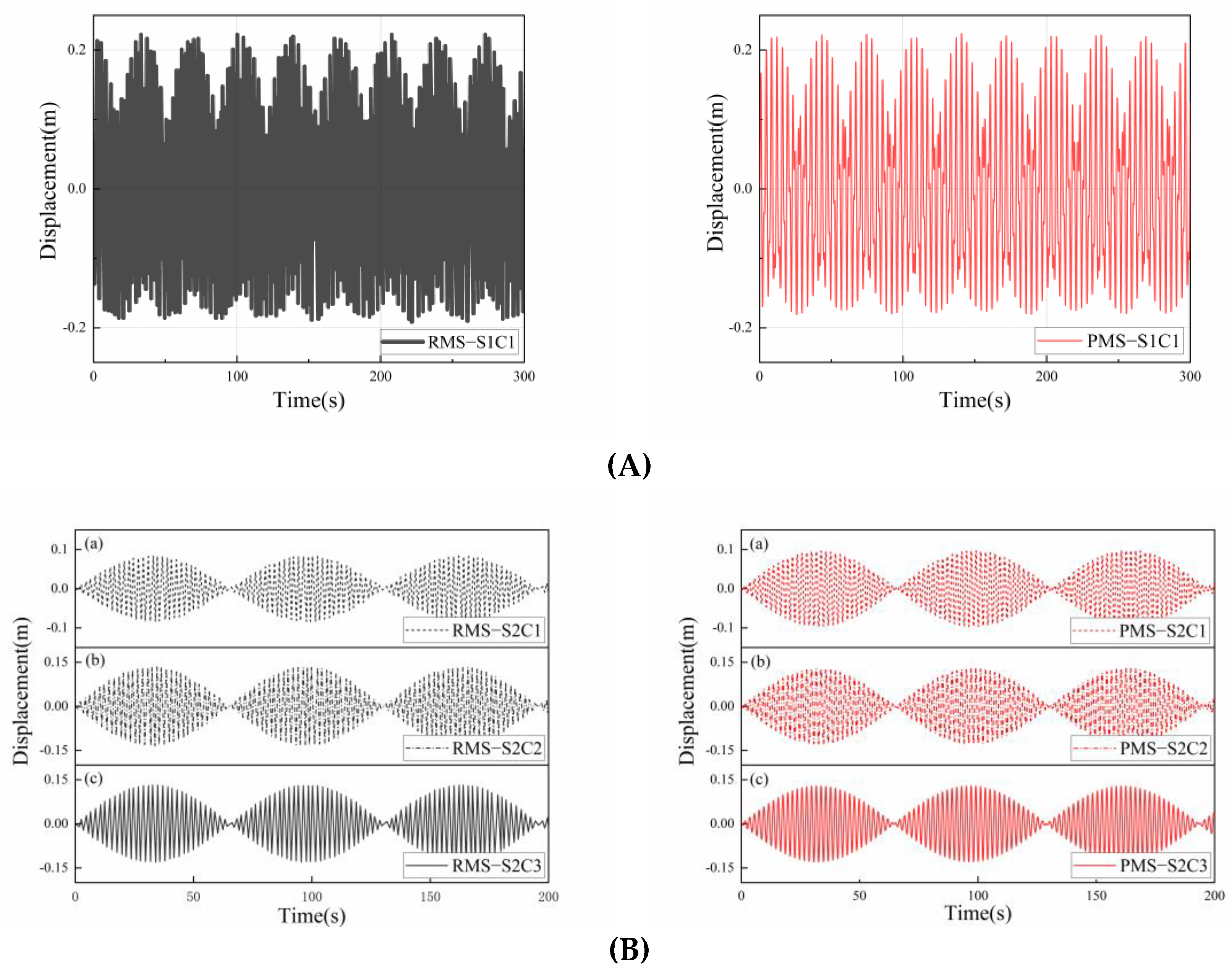
3.2. The Case Verification
- (i)
- (ii)
4. The Numerical Analysis
4.1. Parameters of the Case
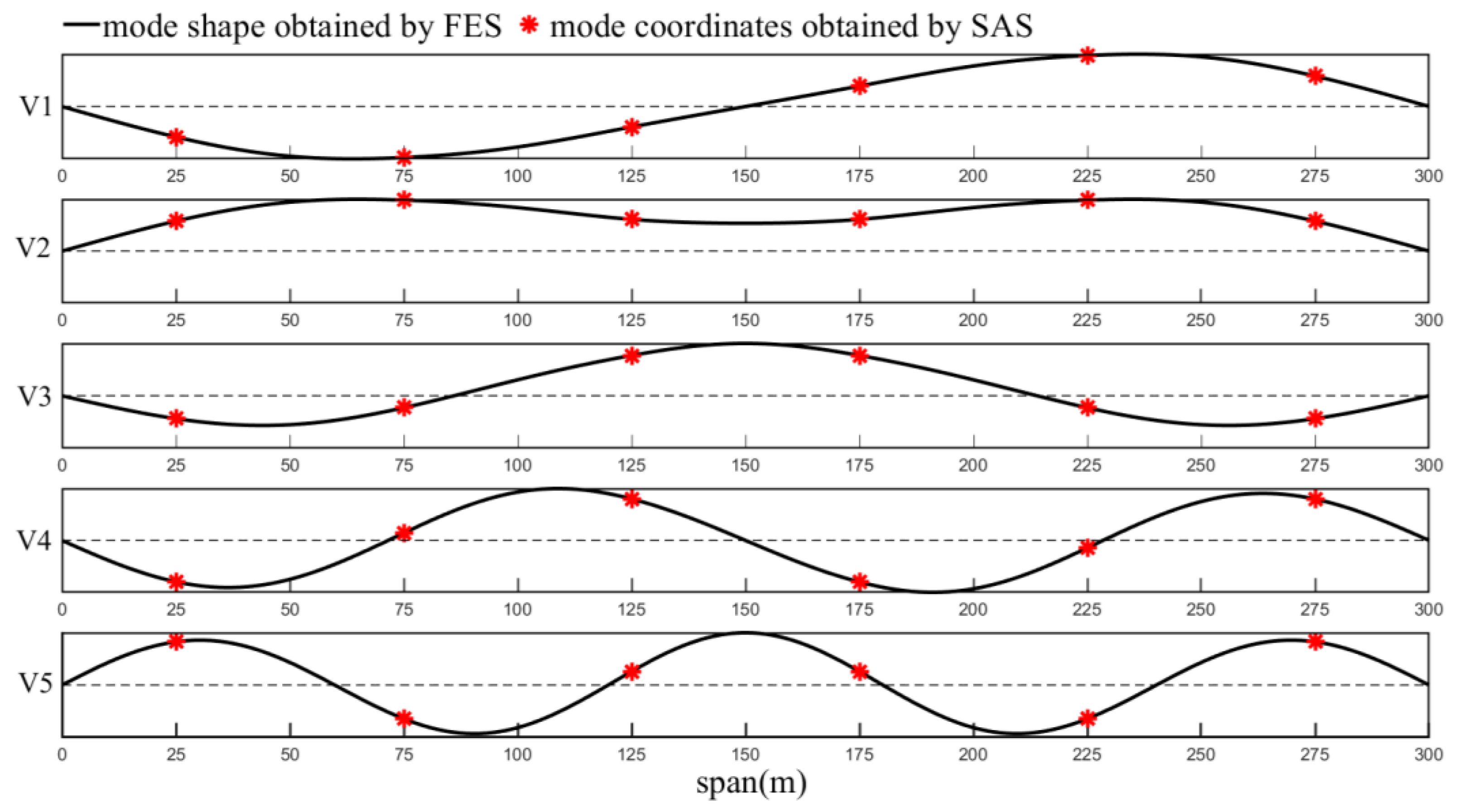
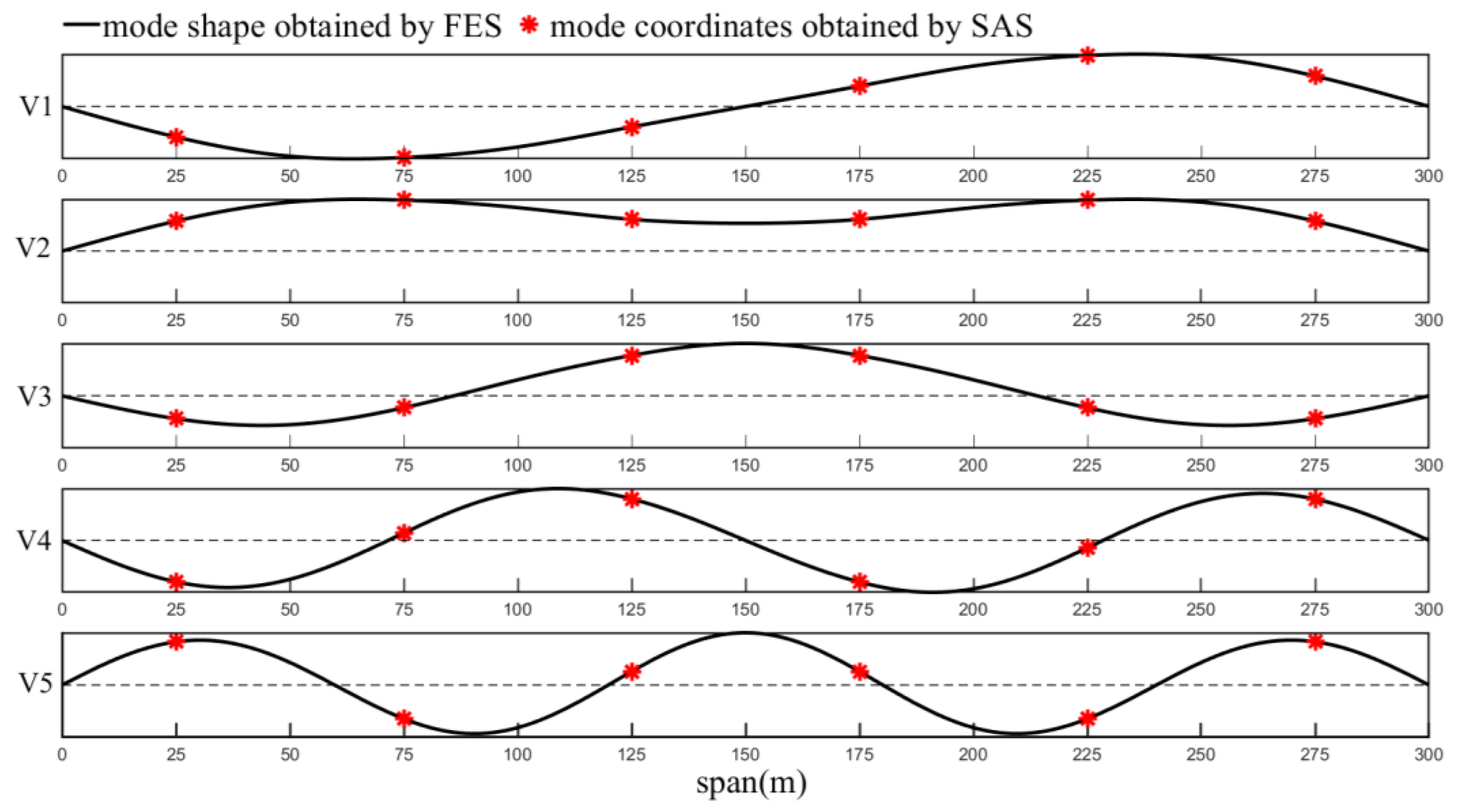
4.2. The In-Plane Vertical Natural Vibration Mode
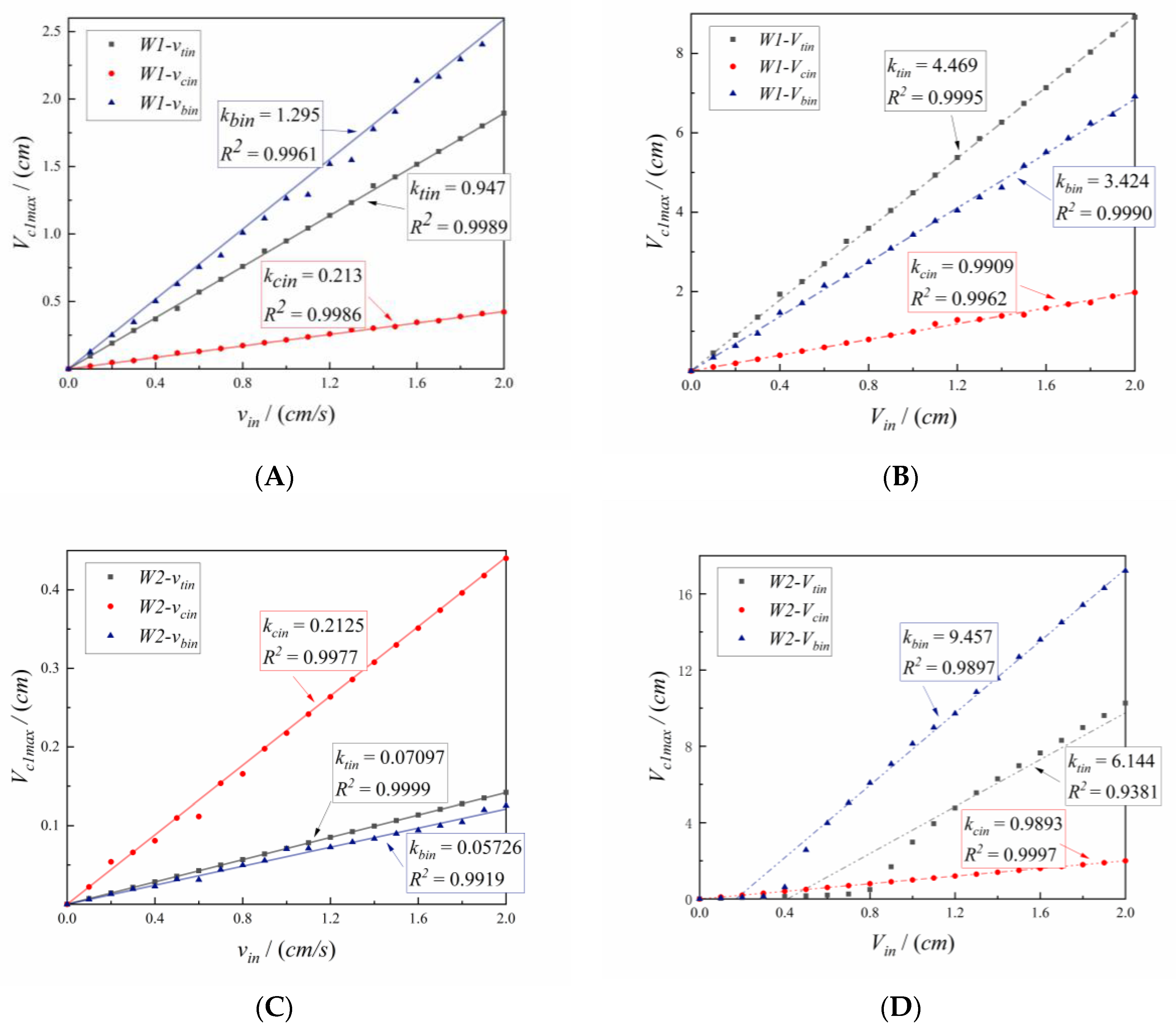
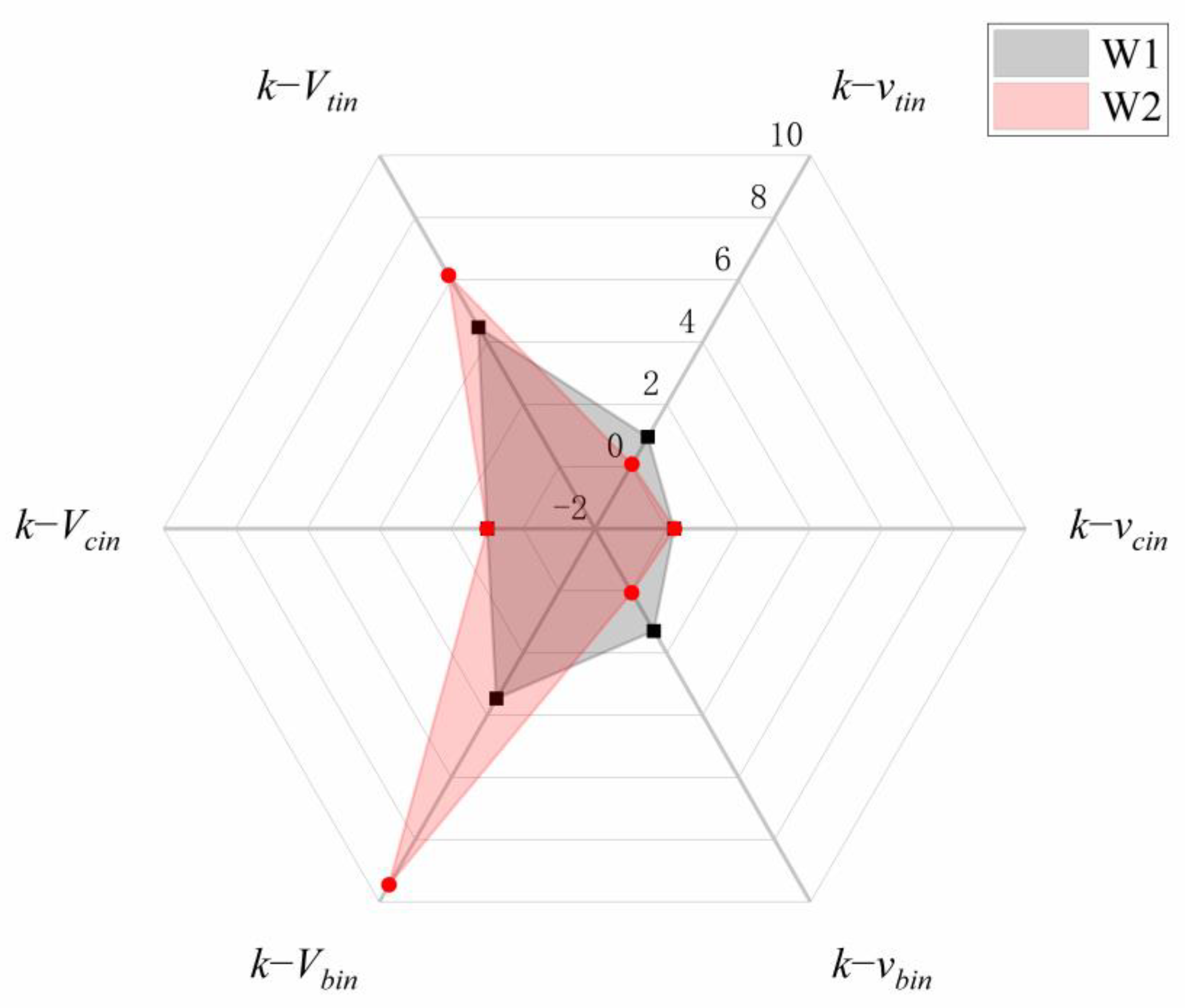
4.3. The Numerical Analysis of the Dynamic Parameter
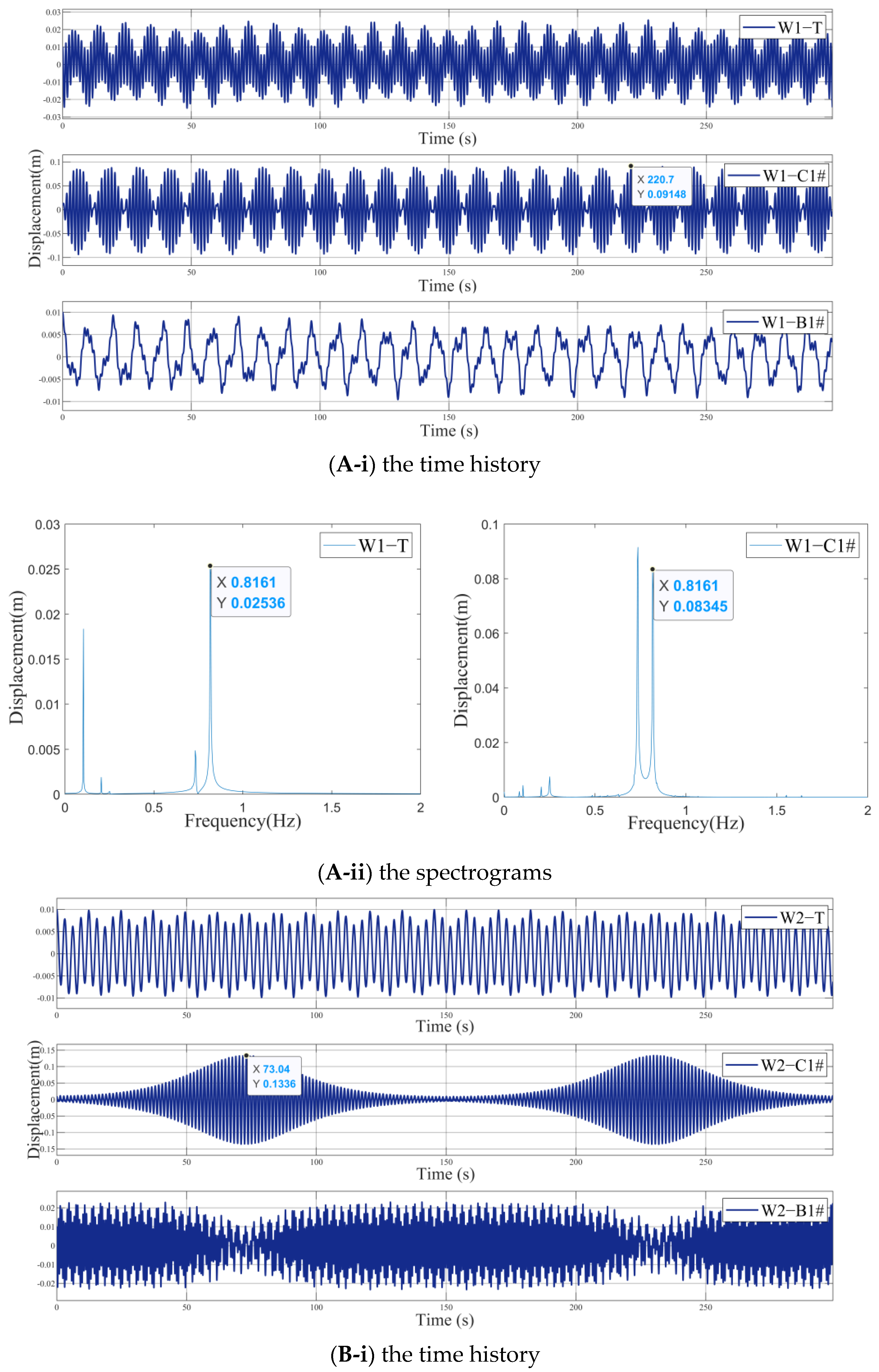
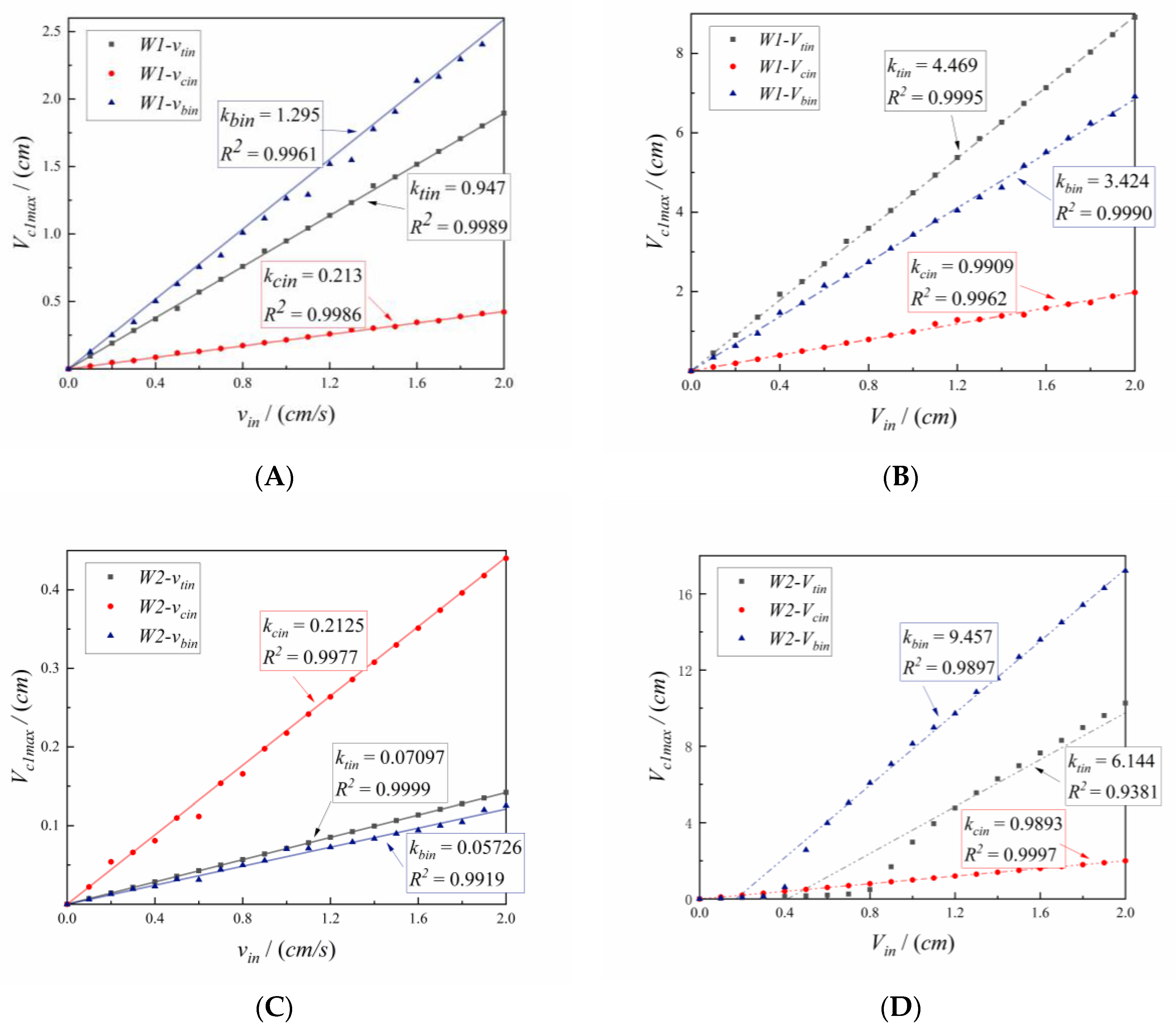
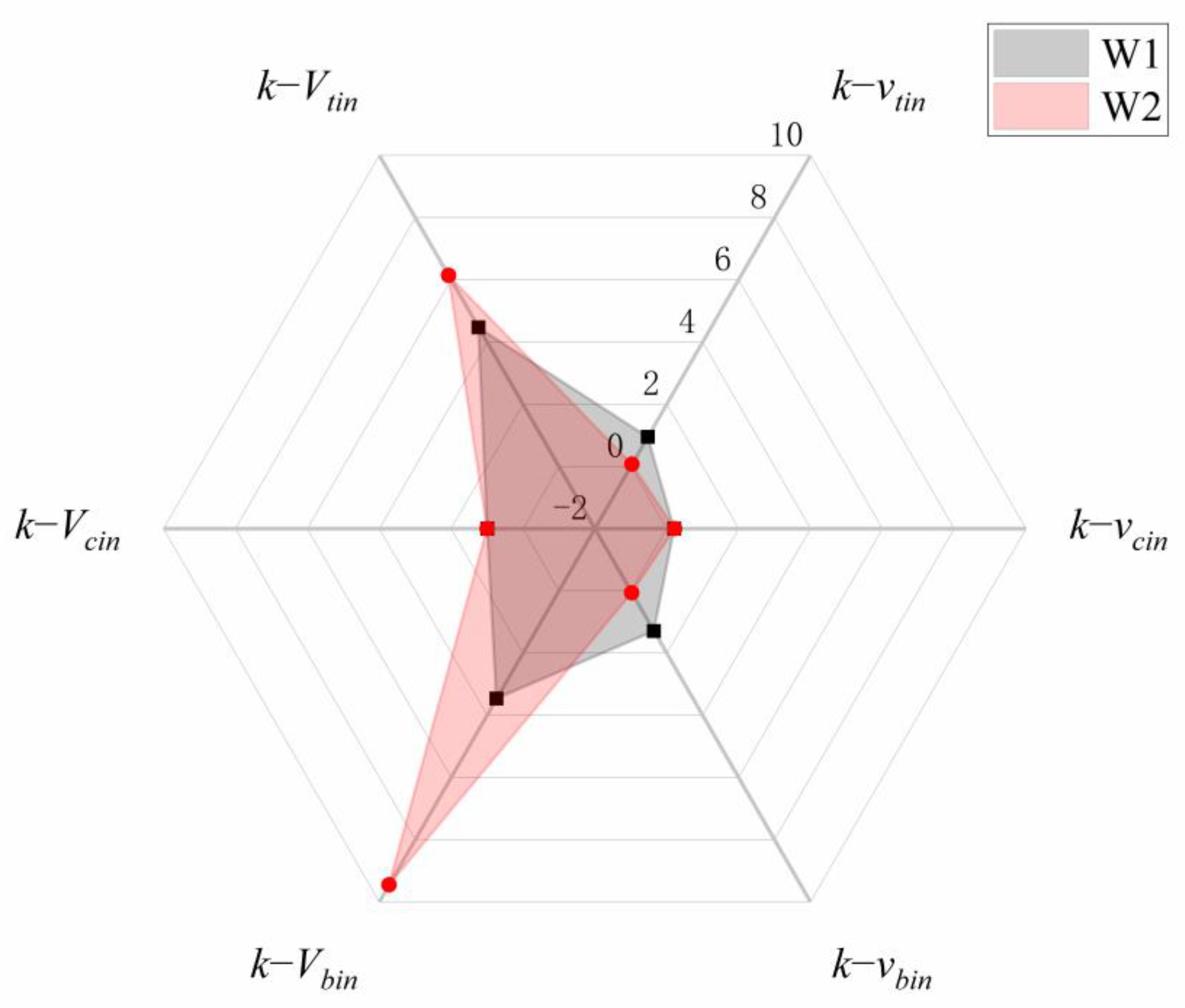
- The first working condition (W1): change to satisfy the equation :, and the displacement and the spectrogram of each component is obtained, as shown in Figure 5A;
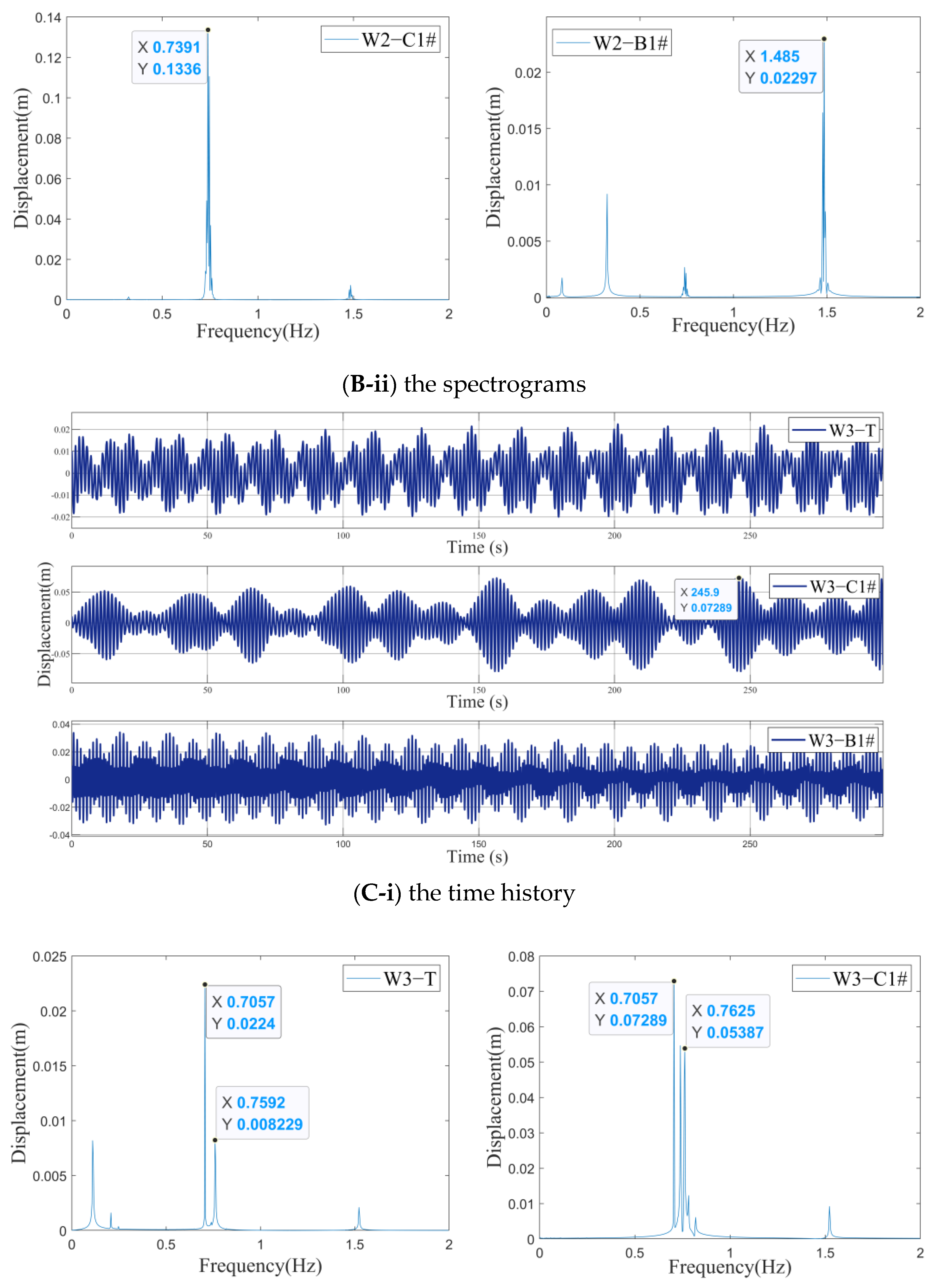
- The second working condition (W2): change to satisfy the equation :, and the displacement and the spectrogram of each component is obtained, as shown in Figure 5B;
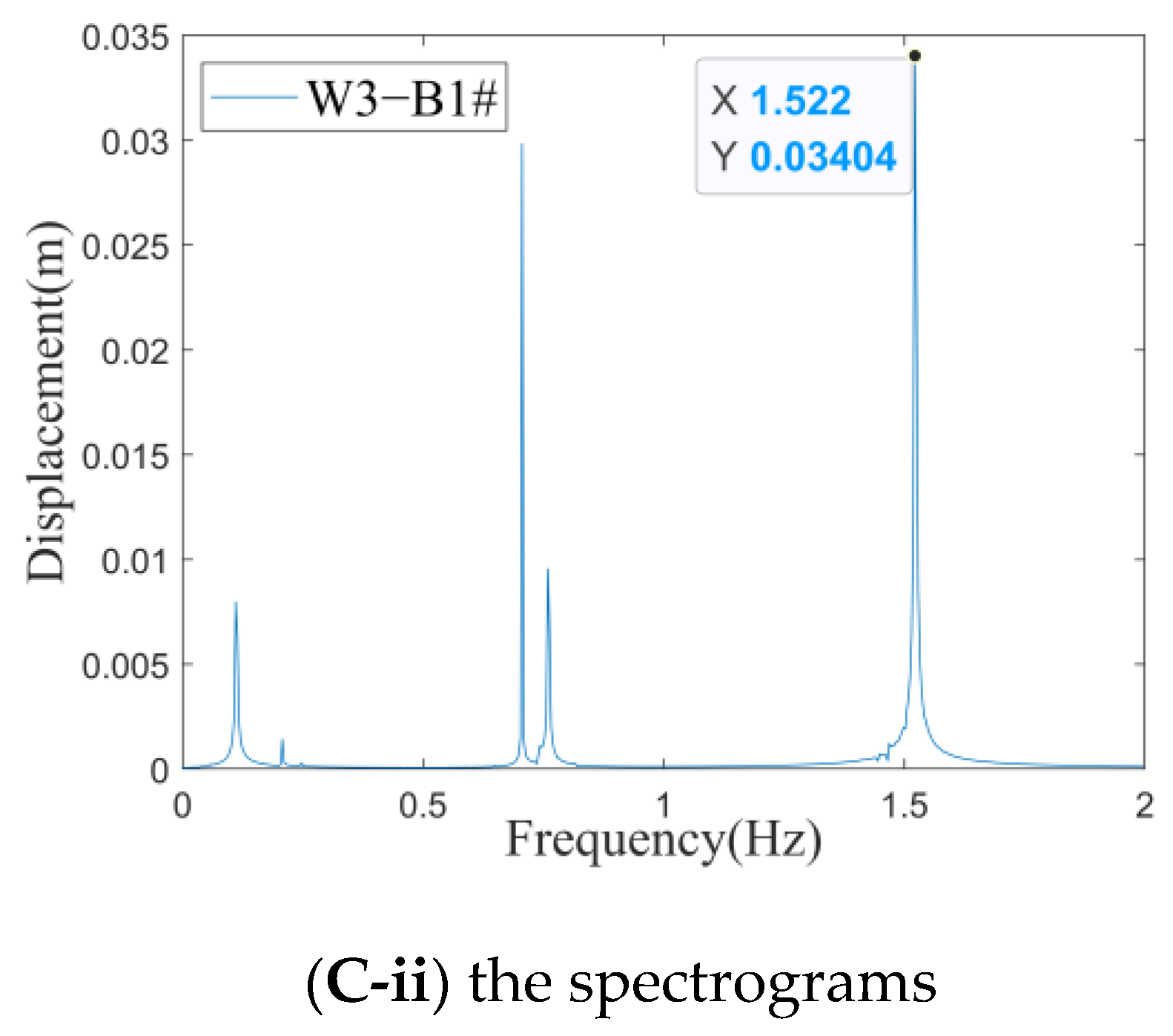
- The third working condition (W3): change and at the same time to satisfy the equation :, and the displacement and the spectrogram of each component are obtained, as shown in Figure 5C.
5. The Influence Discussion on the Internal Resonance under Different Excitations
6. Conclusions
- The CEB, including the effect of bending stiffness of the single beam or indirect influence of adjacent cables, does affect the parametric resonance. The effectiveness of the refined dynamic model considering CEB has been verified by case investigations.
- The concept of dynamic parameters of each component, which affects the conditions of the parametric resonance, is proposed in this paper and deeply discussed with the influence effect on the parametric resonance.
- The excitation effects of different initial conditions are discussed in this paper. The excitation of the beam’s initial displacement under the condition of the CBR, by which the maximum displacement of the cable reaches the peak of 13.36 times the initial value, is relatively large among others. In addition, the different internal resonance behavior of the cable would interfere with each other, resulting in the relatively small maximum vibration displacement of the cable when the CBR and TCR occur at the same time.
- The process of the energy conversion through the medium of the CEB or the tower has been simulated when the parametric resonance occurs. It is evident that the indirect coupling effect of adjacent cables through the beam or the tower cannot be ignored in the parametric resonance of the MCS. Hence, the dynamic analysis of CEB should be paid more attention to the engineering design of the cable-stayed bridge.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Yu, Y.L.; Gao, W.C.; Sun, Y. Study on Refined Model and Influence Factors of Parametric Vibration of Inclined Cables. Eng. Mech. 2010, A02, 178–185. [Google Scholar]
- Kang, H.J.; Zhu, H.P.; Zhao, Y.Y.; Yi, Z.P. In-Plane Non-Linear Dynamics of the Stay Cables. Nonlinear Dyn. 2013, 73, 1385. [Google Scholar] [CrossRef]
- Weber, B. Nonlinear Stay Cable–Bridge Deck Interaction. In International Conference on Experimental Vibration Analysis for Civil Engineering Structures; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Zhu, J.; Ye, G.R.; Xiang, Y.Q.; Chen, W.Q. Non-linear dynamics of cable-stayed beams. J. Zhejiang Univ. (Eng. Sci.) 2010, 44, 2326–2341. [Google Scholar]
- Fujino, Y.; Kimura, K. Cables and Cable Vibration in Cable-Supported Bridges. In Proceedings of International Seminar on Cable Dynamics, Technical Committee on Cable Structures and Wind; Japan Association for Wind Engineering: Tokyo, Japan, 1997; pp. 1–11. [Google Scholar]
- Manabe, Y.; Sasaki, N.; Yamaguti, K. Field Vibration Test of the Tatara Bridge. Bridge Found. Eng. 1999, 33, 27–30. [Google Scholar]
- Caetano, E. Cable Vibrations in Cable-Stayed Bridges; IABSE: Zürich, Switzerland, 2012. [Google Scholar]
- Kang, Z.; Xu, K.; Luo, Z. A numerical study on nonlinear vibration of an inclined cable coupled with the deck in cable-stayed. J. Vib. Control. 2011, 18, 404–416. [Google Scholar] [CrossRef]
- Song, M.T.; Cao, D.Q.; Zhu, W.D.; Bi, Q.S. Dynamic response of a cable-stayed bridge subjected to a moving vehicle load. Acta Mech. 2016, 227, 2925–2945. [Google Scholar] [CrossRef]
- Cong, Y.; Kang, H.; Yan, G.; Guo, T. Modeling, dynamics, and parametric studies of a multi-cable-stayed beam model. Acta Mech. 2020, 231, 4947–4970. [Google Scholar] [CrossRef]
- Gattulli, V.; Lepidi, M.; Macdonald, J.H.G.; Taylor, C.A. One-to-Two Global-Local Interaction in A Cable-Stayed Beam Observed Through Analytical, Finite Element and Experimental Models. Int. J. Non-Linear Mech. 2005, 40, 571–588. [Google Scholar] [CrossRef]
- Gattulli, V.; Lepidi, M. Localization and Veering in the Dynamics of Cable-Stayed Bridges. Comput. Struct. 2007, 85, 1661–1678. [Google Scholar] [CrossRef]
- Wang, F.; Wen, X.X.; Liu, Z.J. Coupled Vibration Analysis of Tower-Cable-Deck of Long-Span Cable-Stayed Bridge. Chin. J. Appl. Mech. 2015, 32, 340–346. [Google Scholar]
- Sun, C.; Zhao, Y.; Peng, J.; Kang, H.; Zhao, Y. Multiple internal resonances and modal interaction processes of a cable stayed bridge physical model subjected to an invariant single-excitation. Eng. Struct. 2018, 172, 938–955. [Google Scholar] [CrossRef]
- Sun, C.S.; Zhao, Y.B.; Wang, Z.Q.; Jian, P. Effects of Longitudinal Girder Vibration on Non-Linear Cable Responses in Cable-Stayed Bridges. Eur. J. Environ. Civ. Eng. 2015, 21, 94–107. [Google Scholar] [CrossRef]
- Zhang, W.J.; Wang, B.; Yang, J.B.; Chai, X.P. Study of Vibration Property of Stay Cables of Jiu-jiang Changjiang River Highway Bridge. World Bridges 2012, 40, 47–51. [Google Scholar]
- Caetano, E.; Cunha, A.; Gattulli, V.; Lepidi, M. Cable-Deck Dynamic Interactions at the International Guadiana Bridge: On-Site Measurements and Finite Element Modelling. Struct. Control. Health Monit. 2010, 15, 237–264. [Google Scholar] [CrossRef]
- Ouni, M.; Kahla, N.B.; Preumont, A. Numerical and Experimental Dynamic Analysis and Control of a Cable Stayed Bridge Under Parametric Excitation. Eng. Struct. 2012, 45, 244–256. [Google Scholar] [CrossRef]
- Ricciardi, G.; Saitta, F. A Continuous Vibration Analysis Model for Cables with Sag and Bending Stiffness. Eng. Struct. 2008, 30, 1459–1472. [Google Scholar] [CrossRef]
- Lu, Q.; Sun, Z.; Zhang, W. Nonlinear parametric vibration with different orders of small parameters for stayed cables. Eng. Struct. 2020, 224, 111198. [Google Scholar] [CrossRef]
- Kamel, M.M.; Hamed, Y.S. Nonlinear analysis of an elastic cable under harmonic excitation. Acta Mech. 2010, 214, 315–325. [Google Scholar] [CrossRef]
- Cong, Y.; Kang, H.; Yan, G. Investigation of dynamic behavior of a cable-stayed cantilever beam under two-frequency excitations. Int. J. Non-Linear Mech. 2021, 129, 103670. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, Z.; Huang, C.; Chen, L.; Li, S. Analytical solutions for planar simultaneous resonances of suspended cables involving two external periodic excitations. Acta Mech. 2018, 229, 4393–4411. [Google Scholar] [CrossRef]
- Yang, S.Z.; Chen, A.R. Parametric Oscillation of Super Long Stay Cables. J. Tongji Univ. (Nat. Sci.) 2005, 10, 27–32. [Google Scholar]
- Zhao, Y.Y.; Wang, T.; Kang, H.J.; Wang, L.H. Analysis of Nonlinear Parametric Vibration Characteristics of Cable Stayed Bridge w1ith Two Cables Coupled to Deck. J. Hunan Univ. (Nat. Sci.) 2008, 10, 1–5. [Google Scholar]
- Tagata, G. Harmonically Forced, Finite Amplitude Vibration of a String. J. Sound Vib. 1977, 51, 483–492. [Google Scholar] [CrossRef]
- Liu, S.L. Cable-Stayed Bridge; People’s Communications Press: Beijing, China, 2002. [Google Scholar]
- Chen, K.; He, S.; Song, Y.; Wu, L.; Wang, K.; Zhang, H. The Numerical Analysis for Parametric Resonance of Multicable System considering Interaction between Adjacent Beam Portions. Hindawi Shock. Vib. 2021, 2021, 6937794. [Google Scholar] [CrossRef]
- Turco, E.; Barchiesi, E.; Giorgio, I.; dell’Isola, F. A Lagrangian Hencky-type non-linear model suitable for metamaterials design of shearable and extensible slender deformable bodies alternative to Timoshenko theory. Int. J. Non-Linear Mech. 2020, 123, 103481. [Google Scholar] [CrossRef]
- Giorgio, I. A discrete formulation of Kirchhoff rods in large-motion dynamics. Math. Mech. Solids 2020, 25, 1081–1100. [Google Scholar] [CrossRef]
- Tan, C.J.; Zhu, B. Coupling vibration analysis of cable and deck of long-span cable-stayed bridge. J. Southwest Jiaotong Univ. 2007, 06, 726–731. [Google Scholar]
- Irvine, H.M. Cable Structure; MIT Press: Cambridge, MA, USA, 1981. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Parameter | |
|---|---|---|
| Tower | Unit mass | |
| Static modulus of elasticity | ||
| Bending moment of inertia | ||
| Damping coefficient | ||
| Height | ||
| Lateral vibration displacement | ||
| Ci# cable | Unit mass | |
| Static modulus of elasticity | ||
| Cross-sectional area | ||
| Static alignment | ||
| Vibration displacement in the chord direction | ||
| Vibration displacement in the transverse direction | ||
| Static tension in the chord direction | ||
| Dynamic tension in the chord direction | ||
| Static tension in the tangential direction | ||
| Dynamic tension in the tangential direction | ||
| Displacement of the cable in chord direction | ||
| The length of the cable under the static state | ||
| Sag of the Ci# cable at the midspan position | ||
| Damping coefficient | ||
| The angle of the cable with beam | ||
| Bi# beam portion | Mass | |
| Static modulus of elasticity | ||
| Bending moment of inertia | ||
| Damping coefficient | ||
| The generalized coordinates, limited with time | ||
| Acceleration of gravity | g | |
| Provenance | Shorthand | ||
|---|---|---|---|
| RMS | PMS | ||
| The case of double-cable tructure in [25] | S1C1 | 1.8928 | 1.8928 |
| S1C2 | 1.8925 | 1.8925 | |
| The case of three-cable structure in [31] | S2C1 | 3.0753 | 3.0731 |
| S2C2 | 3.0659 | 3.0747 | |
| S2C3 | 3.0803 | 3.0748 | |
| Parameters (Unit) | Tower | Parameters (Unit) | Bi# Beam Portion | |
|---|---|---|---|---|
| (kg/m) | 850,000 | (kg/m) | 250,000 | |
| (MPa) | 500 | |||
| (MPa) | 450 | (m4) | 2.85 | |
| (m) | 50 | |||
| (m4) | 3.0 | B1# | 0.2483 | |
| B2# | 0.2582 | |||
| (m) | 80 | B3# | 0.1947 | |
| B4# | 0.1947 | |||
| 0.2368 | B5# | 0.2582 | ||
| B6# | 0.2483 | |||
| Parameters (Unit) | C1# | C2# | C3# | C4# | C5# | C6# |
|---|---|---|---|---|---|---|
| (rad) | 0.57 | 0.82 | 1.27 | 1.27 | 0.82 | 0.57 |
| (m) | 148.41 | 109.67 | 83.82 | 83.82 | 109.67 | 148.41 |
| (cm2) | 99.43 | 70.18 | 53.49 | 53.49 | 70.18 | 99.43 |
| (MN) | 3.88 | 3.65 | 3.49 | 3.49 | 3.65 | 3.88 |
| (kg/m) | 81.04 | 57.20 | 43.59 | 43.59 | 57.20 | 81.04 |
| (m) | 0.51 | 0.16 | 0.03 | 0.3 | 0.16 | 0.51 |
| (GPa) | 202 | 208 | 209 | 209 | 208 | 202 |
| The Irvine Parameter λ [32] | 0.3848 | 0.0538 | 0.0017 | 0.0017 | 0.0538 | 0.3848 |
| 0.7478 | 1.1542 | 1.6891 | 1.6891 | 1.1542 | 0.7478 |
| Mode No. | Abbreviation | f (Hz) | Error (%) | |
|---|---|---|---|---|
| FEM | PMS | |||
| 1 | V1 | 0.01308 | 0.01309 | 0.8 |
| 2 | V2 | 0.01339 | 0.01340 | 0.7 |
| 3 | V3 | 0.01780 | 0.01781 | 0.6 |
| 4 | V4 | 0.02457 | 0.02459 | 0.8 |
| 5 | V5 | 0.03452 | 0.03453 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, S.; Chen, K.; Song, Y.; Wang, B.; Wang, K.; Hou, W. Dynamic Analysis on the Parametric Resonance of the Tower–Multicable–Beam Coupled System. Appl. Sci. 2022, 12, 4095. https://doi.org/10.3390/app12094095
He S, Chen K, Song Y, Wang B, Wang K, Hou W. Dynamic Analysis on the Parametric Resonance of the Tower–Multicable–Beam Coupled System. Applied Sciences. 2022; 12(9):4095. https://doi.org/10.3390/app12094095
Chicago/Turabian StyleHe, Shuanhai, Kefan Chen, Yifan Song, Binxian Wang, Kang Wang, and Wei Hou. 2022. "Dynamic Analysis on the Parametric Resonance of the Tower–Multicable–Beam Coupled System" Applied Sciences 12, no. 9: 4095. https://doi.org/10.3390/app12094095
APA StyleHe, S., Chen, K., Song, Y., Wang, B., Wang, K., & Hou, W. (2022). Dynamic Analysis on the Parametric Resonance of the Tower–Multicable–Beam Coupled System. Applied Sciences, 12(9), 4095. https://doi.org/10.3390/app12094095