
GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III


Abstract
:1. Introduction
2. Models and Methods
2.1. Navigation Payload Model
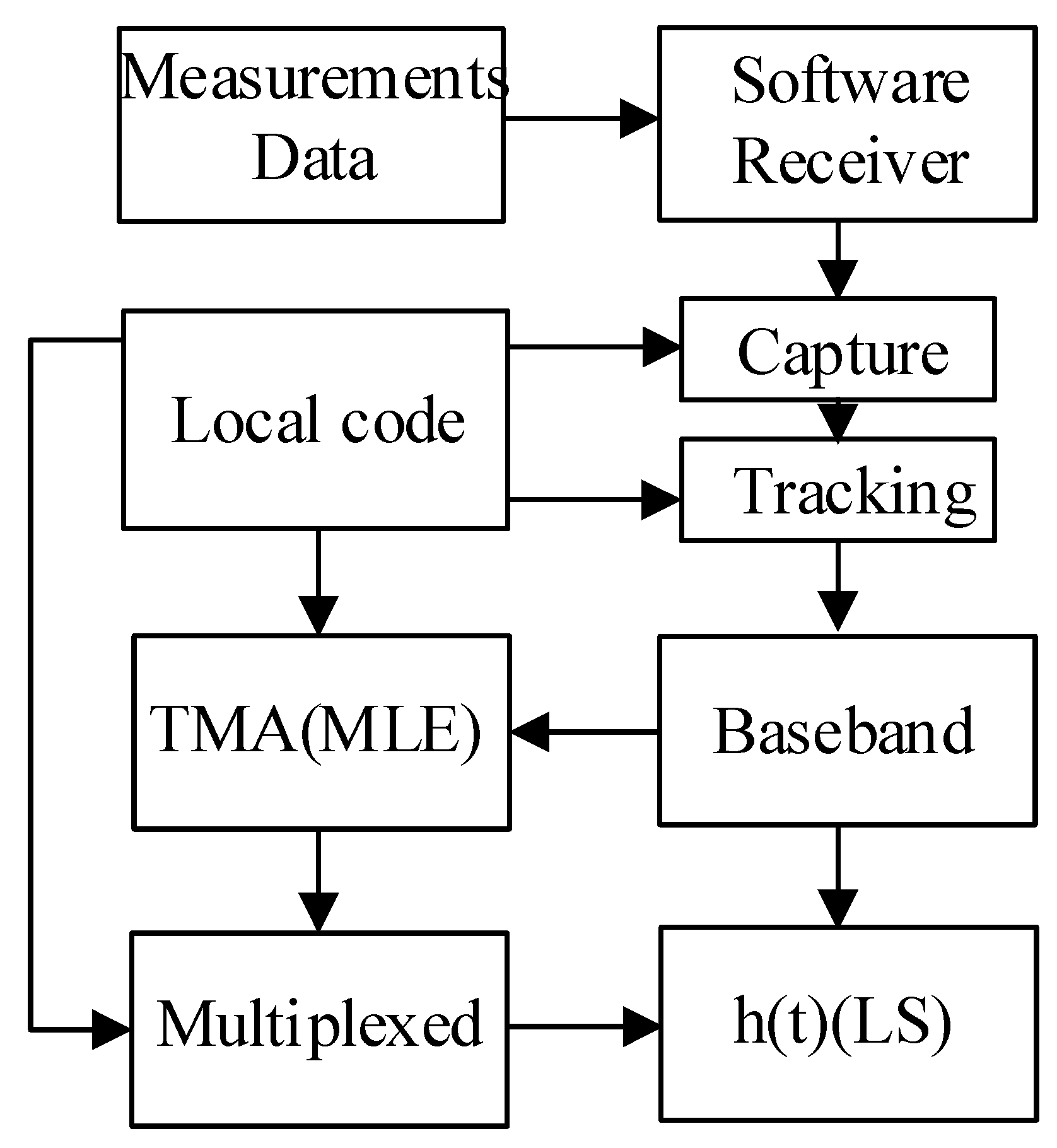
2.2. Joint Estimation Algorithm
3. Results Analysis
3.1. Measurements with NTSC’s High-Gain Antenna
- The in-phase and quadrature (I/Q) branch is completely separated, and the related outputs are irrelevant;
- The mixed effect of signal distortion and external noise will not lead to loss of lock, and the tracking jitter is negligible;
- In a short time, the influence of the spatial transport layer is ignored in a small area.
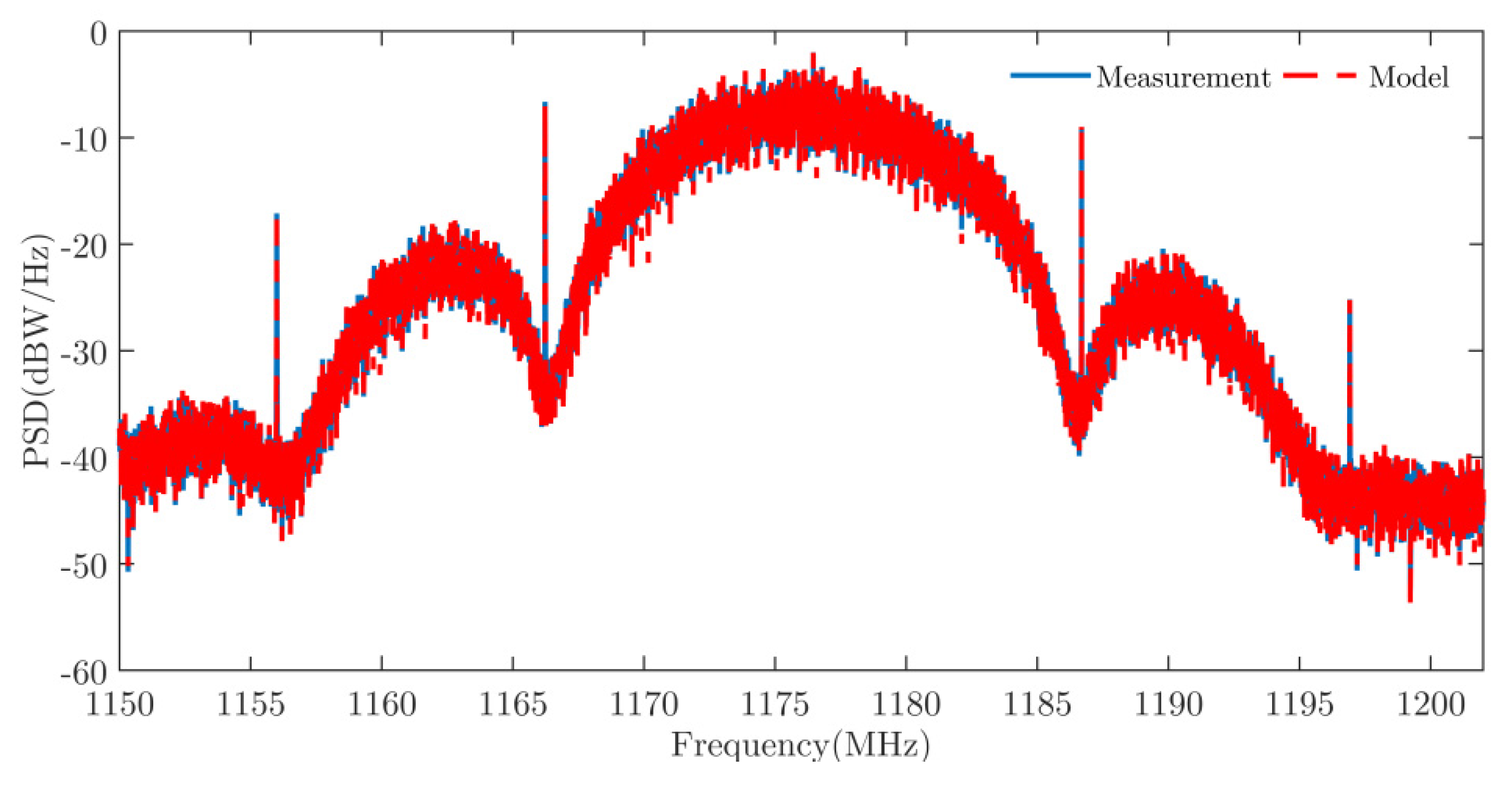
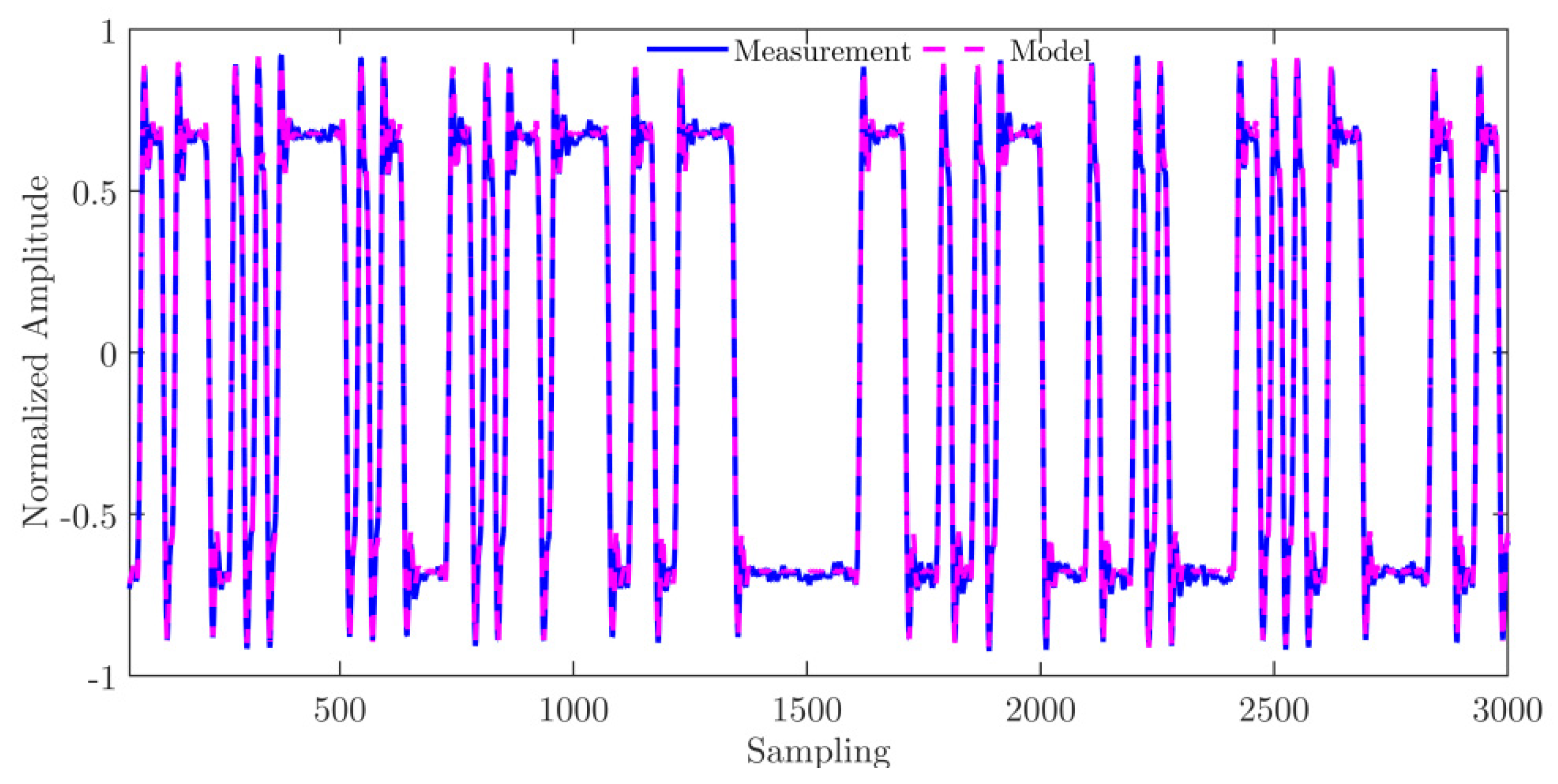
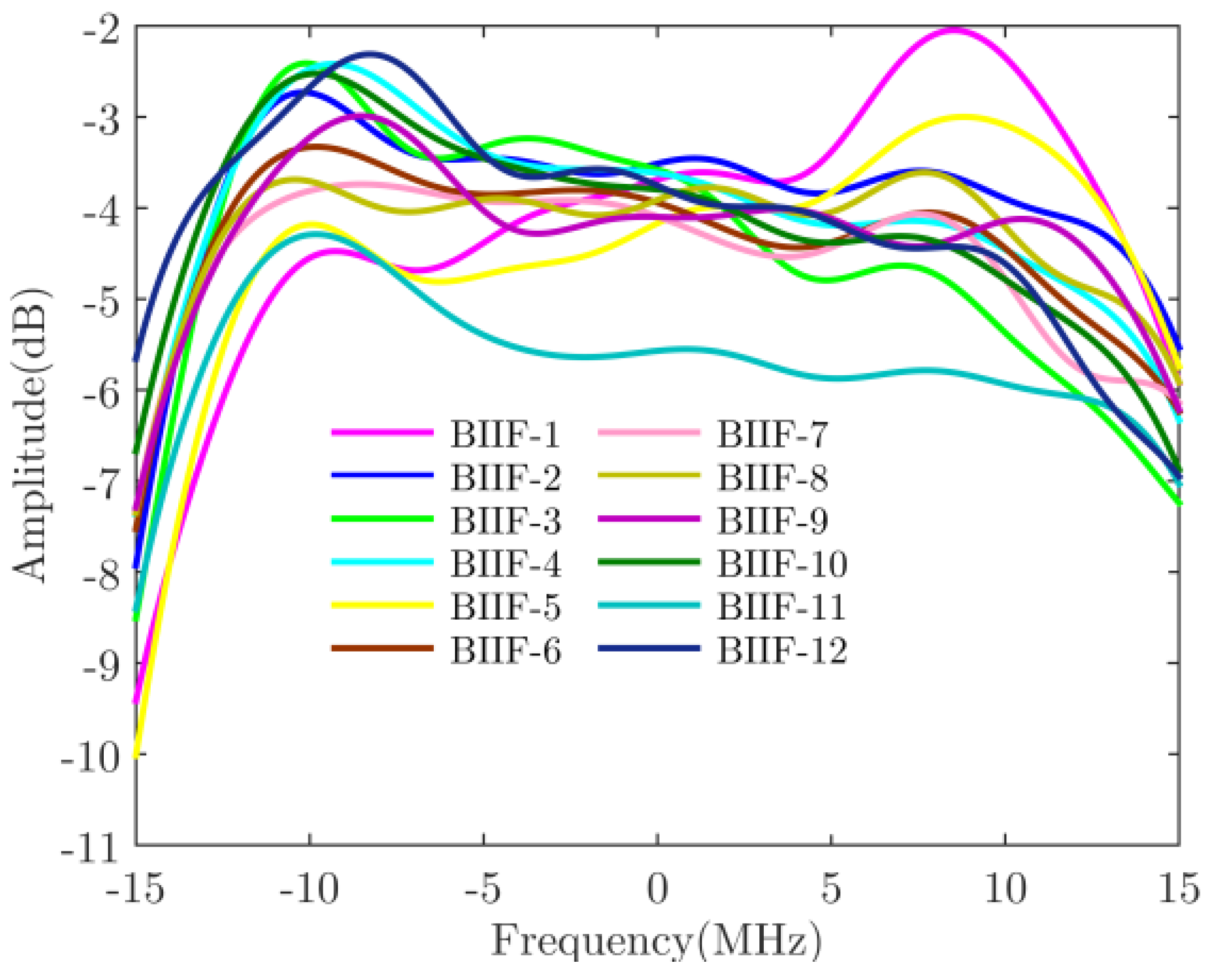
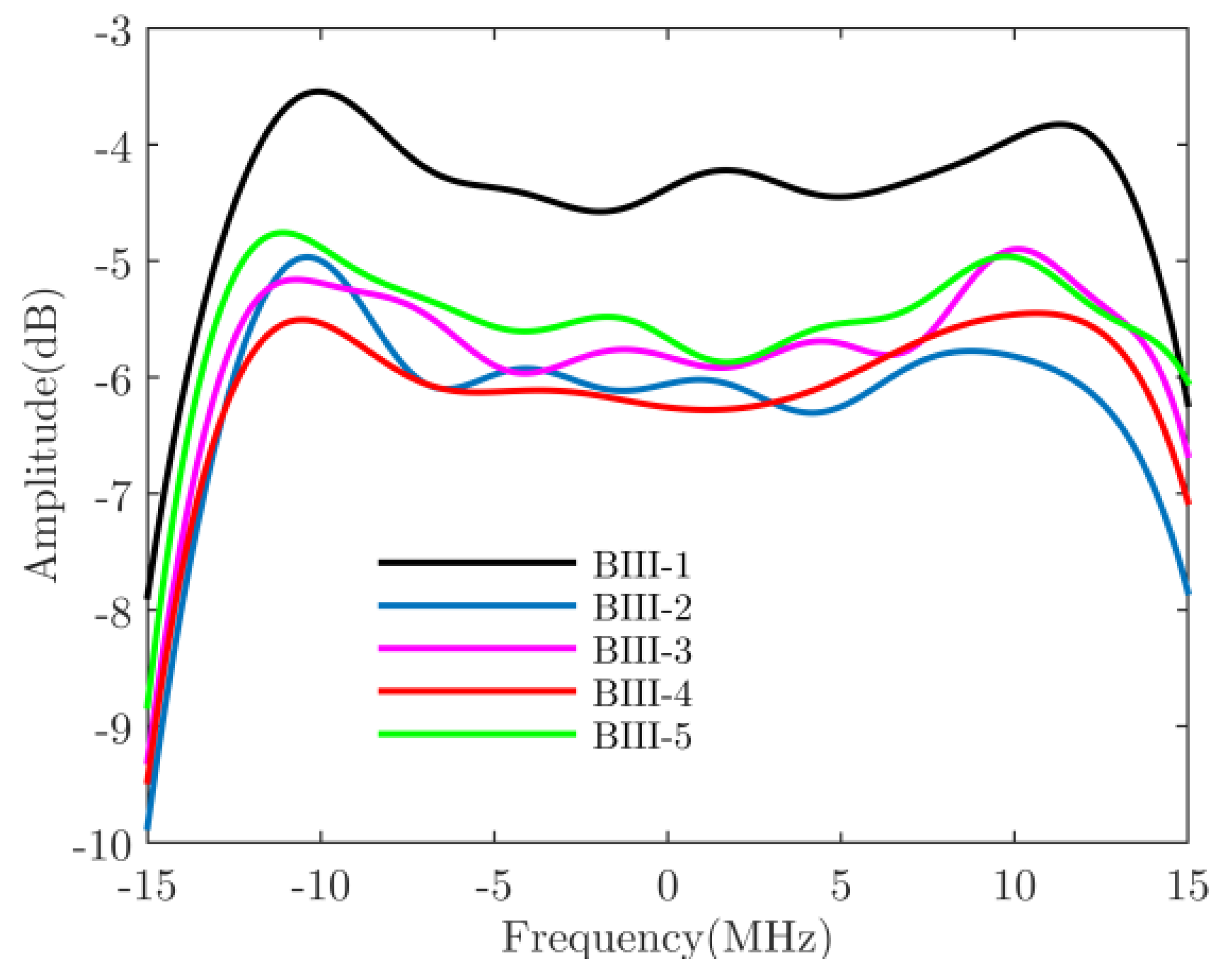
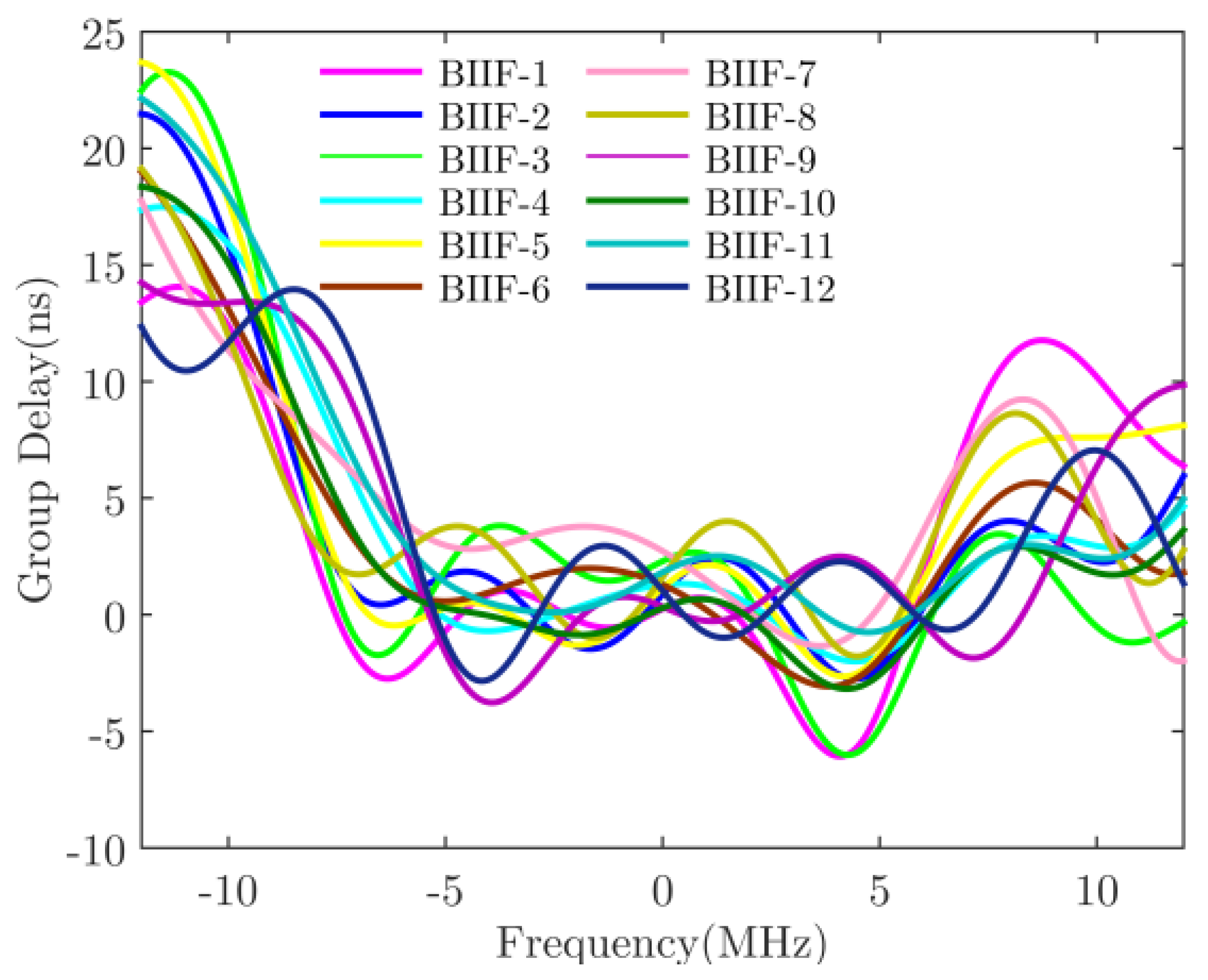
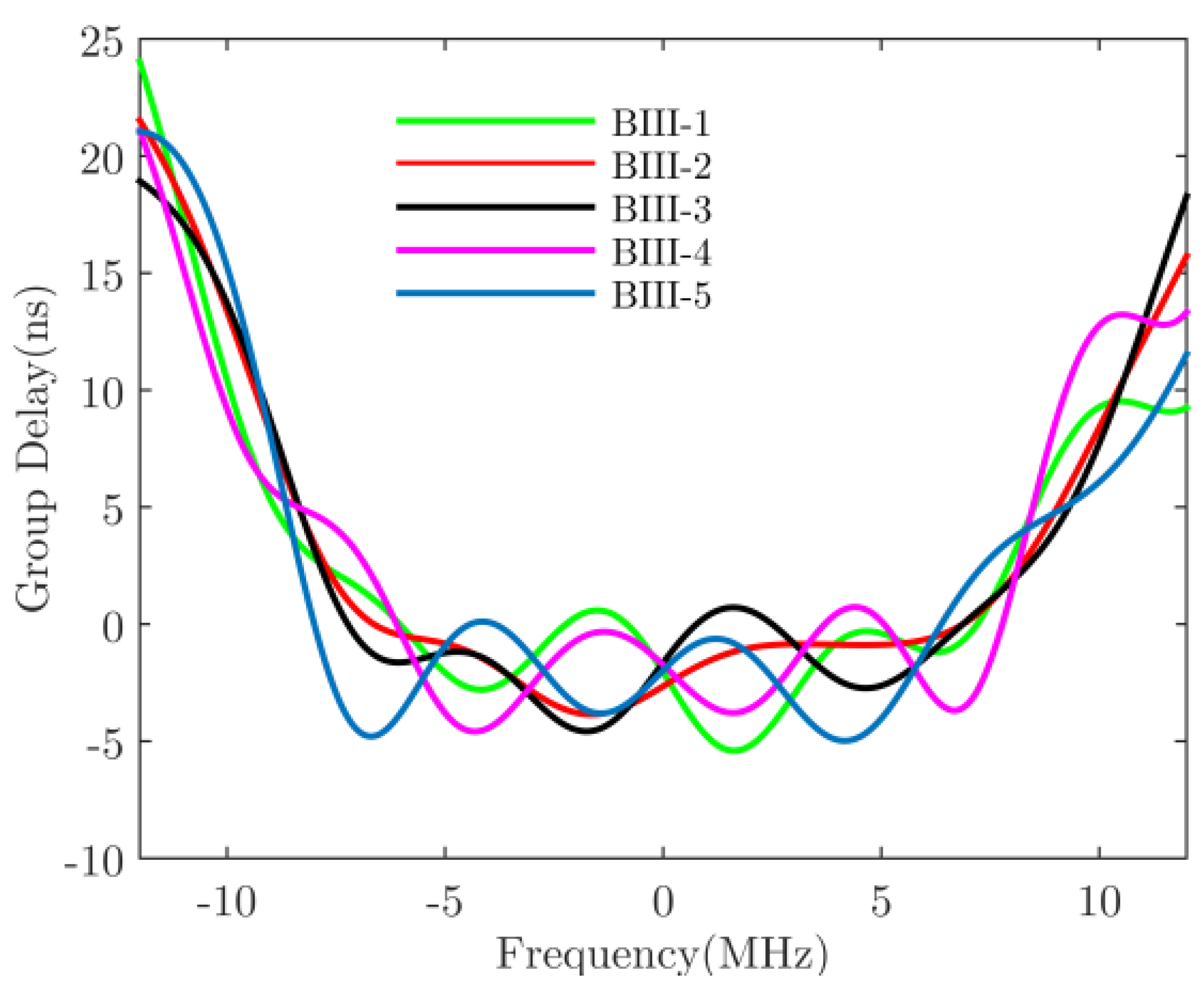
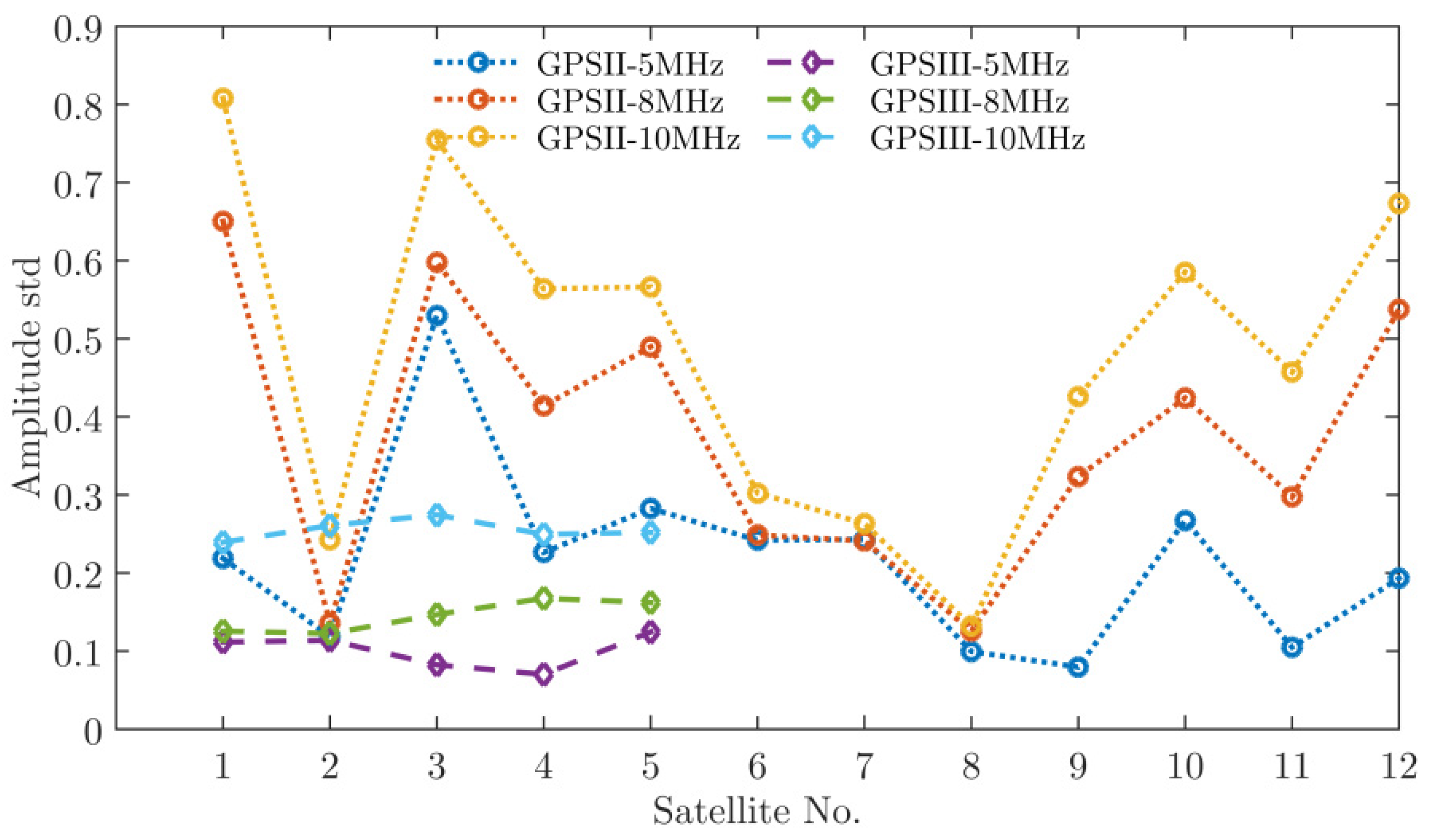
3.2. Signal Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, C.Y.; Guo, J.; Lu, X.C. A new evil waveform evaluating method for new BDS navigation signals. GPS Solut. 2018, 22, 37–50. [Google Scholar] [CrossRef]
- BeiDou Navigation Satellite System Signal in Space Interface Control Document, Open Service Signal B1I (Version 3.0). China Satellite Navigation Office, February 2019. Available online: http://www.beidou.gov.cn (accessed on 21 August 2020).
- European GNSS (Galileo). Open Service Signal in Space Interface Control Document; European Union and European Space Agency: Paris, France, November 2015; Issue 1.2; Available online: https://galileognss.eu (accessed on 18 August 2020).
- GPS Global Positioning System Directorate Systems Engineering and Integration. IS-GPS-200J NAVSTAR GPS Space-Segment/Navigation User Segment Interfaces. 22 May 2018. Available online: https://www.gps.gov (accessed on 6 April 2022).
- Li, C.H.; Liu, Y.X.; Mo, W.H.; Ou, G. Analysis of the impact of satellite’s high power amplifier on the performance of navigation signals carrier tracking. J. Natl. Univ. Def. Technol. 2013, 35, 81–84. [Google Scholar]
- Chen, Y.B.; Kou, Y.H.; Zhang, Z.W. Analog distortion of wideband signal in satellite navigation payload. In Proceedings of the China Satellite Navigation Conference (CSNC), Guangzhou, China, 15–19 May 2012; pp. 89–100. [Google Scholar]
- Yu, X.L.; Kou, Y.H. Simulation of analog distortion of dual-frequency multiplexing signal generated by navigation satellite. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 1048–1055. [Google Scholar]
- Liu, Y.Q.; Chen, L.; Yang, Y.; Pan, H.; Ran, Y.H. Theoretical evaluation of group delay on pseudo range bias. GPS Solut. 2019, 23, 69–71. [Google Scholar] [CrossRef]
- Rebeyrol, E.; Macabiau, C.; Julien., O.; Issler., J.L. Signal distortions at GNSS payload level. In Proceedings of the International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 1595–1605. [Google Scholar]
- Thoelert, S.; Vergara, M.; Sgammini, M.; Enneking, C.; Antreich, F.; Meurer, M.; Brocard, D.; Rodrigues, C. Characterization of Nominal Signal Distortions and Impact on Receiver Performance for GPS (IIF) L5 and Galileo (IOV) E1/E5a Signals. In Proceedings of the 27th ION National Technical Meeting, Tampa, FL, USA, 9–12 September 2014. [Google Scholar]
- Kou, Y.; Wu, H. Model and implementation of pseudo-range bias free linear channel. GPS Solut. 2021, 25, 53. [Google Scholar] [CrossRef]
- Phelts, R.E.; Akos, D. Effects of signal deformations on modernized gnss signals. J. Glob. Position. Syst. 2006, 5, 2–10. [Google Scholar] [CrossRef] [Green Version]
- Yan, T.; Wang, Y.; Qu, B.; Liu, X. Analysis Methods of Linear Distortion Characteristics for GNSS Signals. In Proceedings of the China Satellite Navigation Conference (CSNC) 2018, Harbin, China, 23–25 May 2018; pp. 183–195. [Google Scholar]
- Kang, L.; Lu, X.; Wang, X.; He, C.; Rao, Y. Navigation Signal Chip Domain Assessment on Beidou Navigation System. J. Electron. Inf. Technol. 2018, 40, 1002–1006. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, T.; Wang, G.; Bian, L.; Meng, Y. Analysis of Interaction between Navigation Payload and Constant Envelope Design of Navigation Signal. In Proceedings of the China Satellite Navigation Conference (CSNC) 2019, Beijing, China, 25–28 May 2019; pp. 421–431. [Google Scholar]
- Shi, H.H.; Wang, M.; Rao, Y.; Lu, X.; Wang, X. Researches on Pro-retirement Signal Quality of BeiDou Navigation Satellite System GEO-3 Satellite B1 Signal. J. Electron. Inf. Technol. 2020, 42, 1573–1580. [Google Scholar] [CrossRef]
- Lu, X.; He, C.; Wang, X. Design of GNSS Monitoring and Assessment System and Assessment of GNSS Signal-in-Space. J. Time Freq. 2016, 39, 225–246. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS Principles and Applications, 3rd ed.; Artech House: Norwood, MA, USA, 2018. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | BIIF-1 | BIIF-2 | BIIF-3 | BIIF-4 | BIIF-5 | BIIF-6 | BIIF-7 | BIIF-8 | BIIF-9 | BIIF-10 | BIIF-11 | BIIF-12 | GPS III-1 | GPS III-2 | GPS III-3 | GPS III-4 | GPS III-5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data (%) | −3.2 | −2.1 | −3.0 | −2.0 | −3.0 | −3.0 | −2.0 | −2.0 | −1.0 | −2.0 | −1.0 | −2.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| Pilot (%) | −1.1 | −2.0 | −2.0 | −2.0 | −5.0 | −6.0 | −5.0 | −4.0 | −2.0 | −1.0 | −4.0 | −3.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| Satellite | BIIF-1 | BIIF-2 | BIIF-3 | BIIF-4 | BIIF-5 | BIIF-6 | BIIF-7 | BIIF-8 | BIIF-9 | BIIF-10 | BIIF-11 | BIIF-12 | GPS III-1 | GPS III-2 | GPS III-3 | GPS III-4 | GPS III-5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data (m) | 0.032 | 0.032 | 0.034 | 0.032 | 0.032 | 0.027 | 0.031 | 0.028 | 0.031 | 0.031 | 0.032 | 0.031 | 0.016 | 0.013 | 0.010 | 0.011 | 0.009 |
| Pilot (m) | 0.032 | 0.030 | 0.030 | 0.032 | 0.031 | 0.030 | 0.031 | 0.032 | 0.031 | 0.032 | 0.031 | 0.031 | 0.019 | 0.010 | 0.014 | 0.012 | 0.010 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Lu, X.; Rao, Y. GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III. Appl. Sci. 2022, 12, 3791. https://doi.org/10.3390/app12083791
Wang M, Lu X, Rao Y. GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III. Applied Sciences. 2022; 12(8):3791. https://doi.org/10.3390/app12083791
Chicago/Turabian StyleWang, Meng, Xiaochun Lu, and Yongnan Rao. 2022. "GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III" Applied Sciences 12, no. 8: 3791. https://doi.org/10.3390/app12083791
APA StyleWang, M., Lu, X., & Rao, Y. (2022). GNSS Signal Distortion Estimation: A Comparative Analysis of L5 Signal from GPS II and GPS III. Applied Sciences, 12(8), 3791. https://doi.org/10.3390/app12083791