
Deep Learning-Based Occlusion Handling of Overlapped Plants for Robotic Grasping



Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
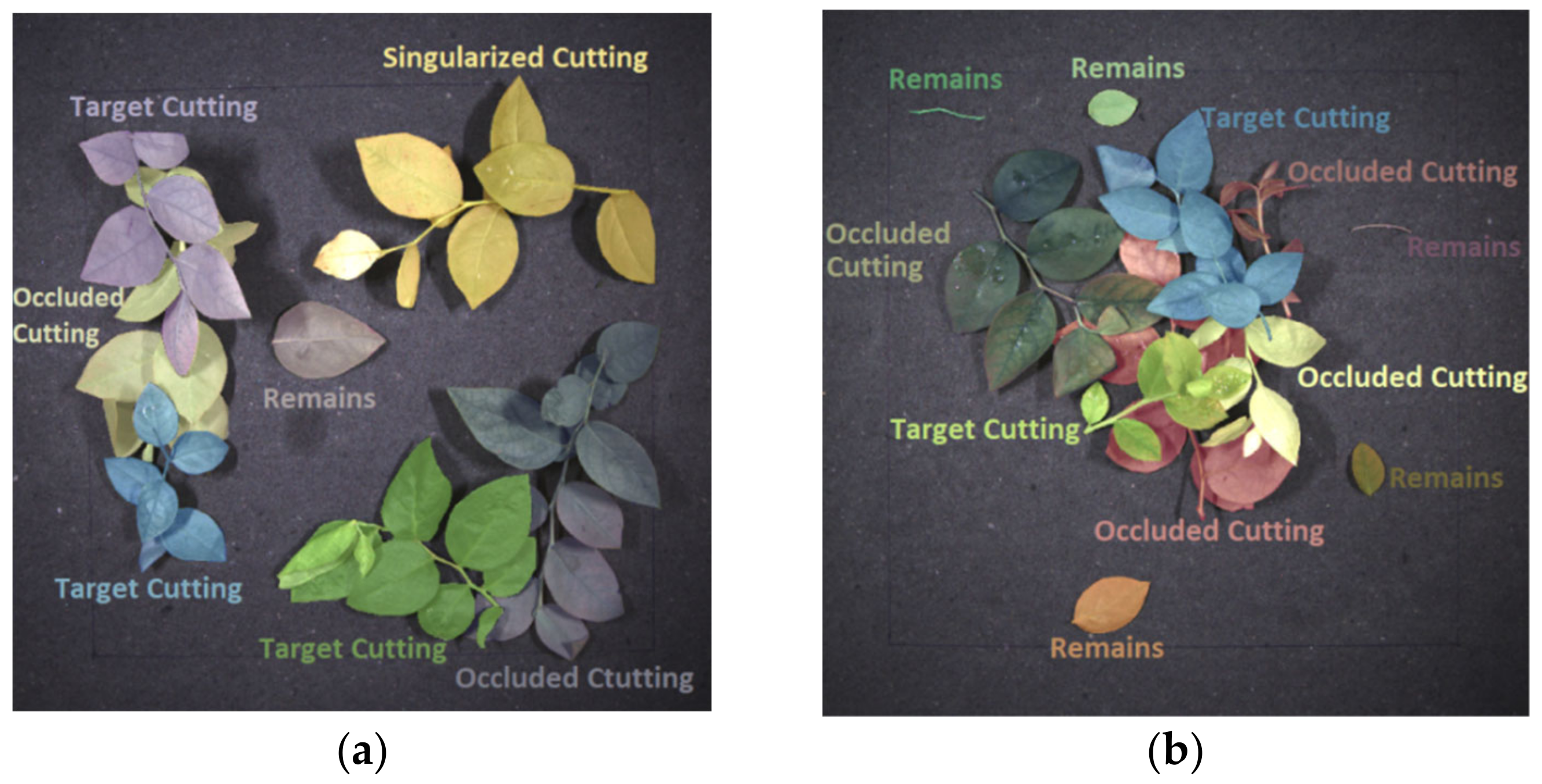
3.1. Dataset
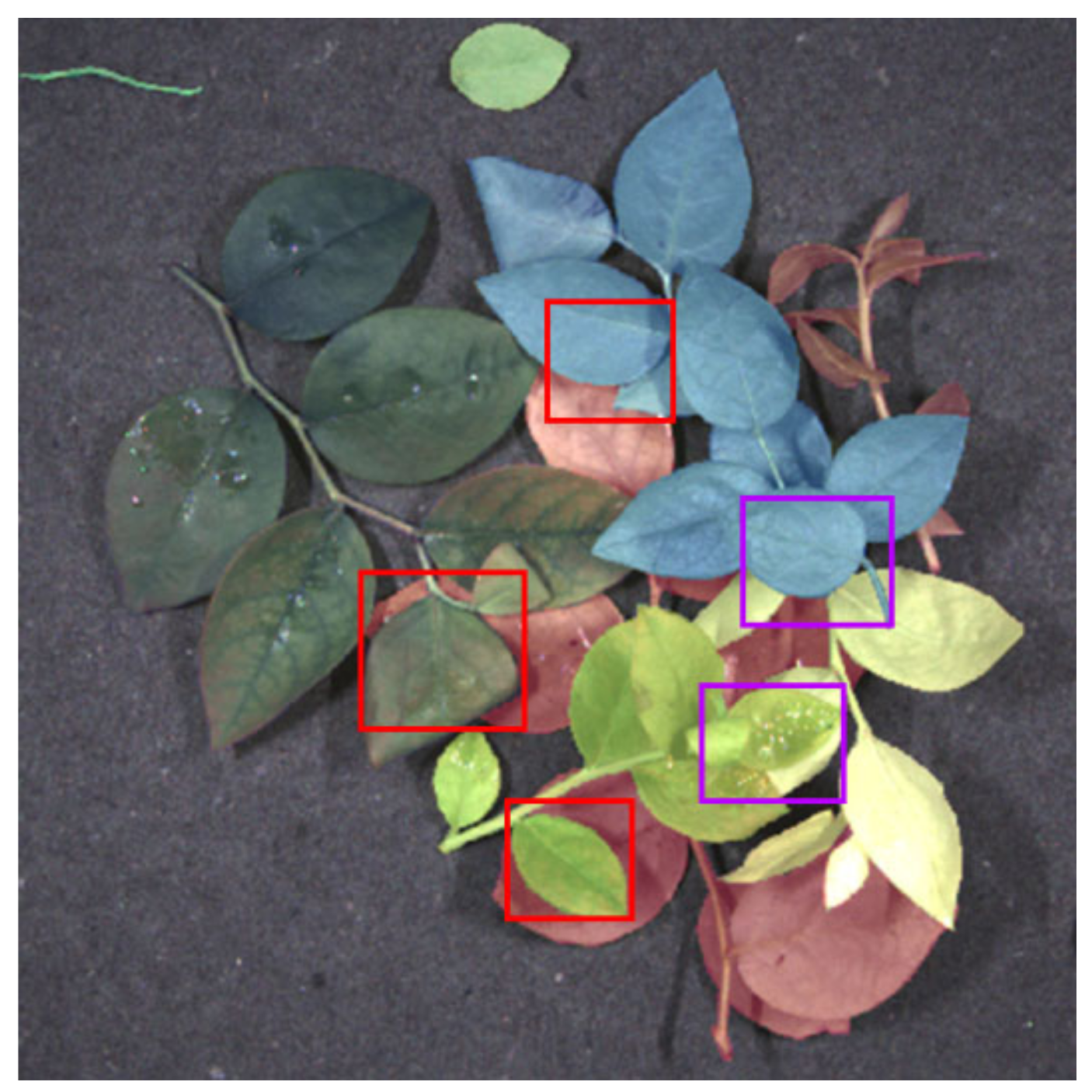
- An occlusion patch is a group of pixels in the image for which one part of a plant cutting is occluded by other plant cuttings and, thus, this part is not visible in the image. Based on this definition, one cutting can have several occlusion patches with a single cutting or multiple other cuttings.
- A normal occlusion patch is the occlusion patch in the image for which a part of only one plant cutting is not visible. It should be noted that one plant cutting can have multiple normal occlusion patches. The red windows in Figure 2 illustrate some locations where normal occlusion patches are present.
- A complex occlusion patch is the occlusion patch in the image for which parts of more than one plant cuttings are not visible. One plant cutting might have multiple complex occlusion patches or even a mixture of several normal and complex occlusion patches. The purple windows in Figure 2 illustrate some locations where complex occlusion patches are present.
- A normal occlusion image is an image that contains at least one normal occlusion patch and no complex occlusion patches.
- A complex occlusion image is an image that contains at least one complex occlusion patch.
3.2. Synthesizing 2D Images
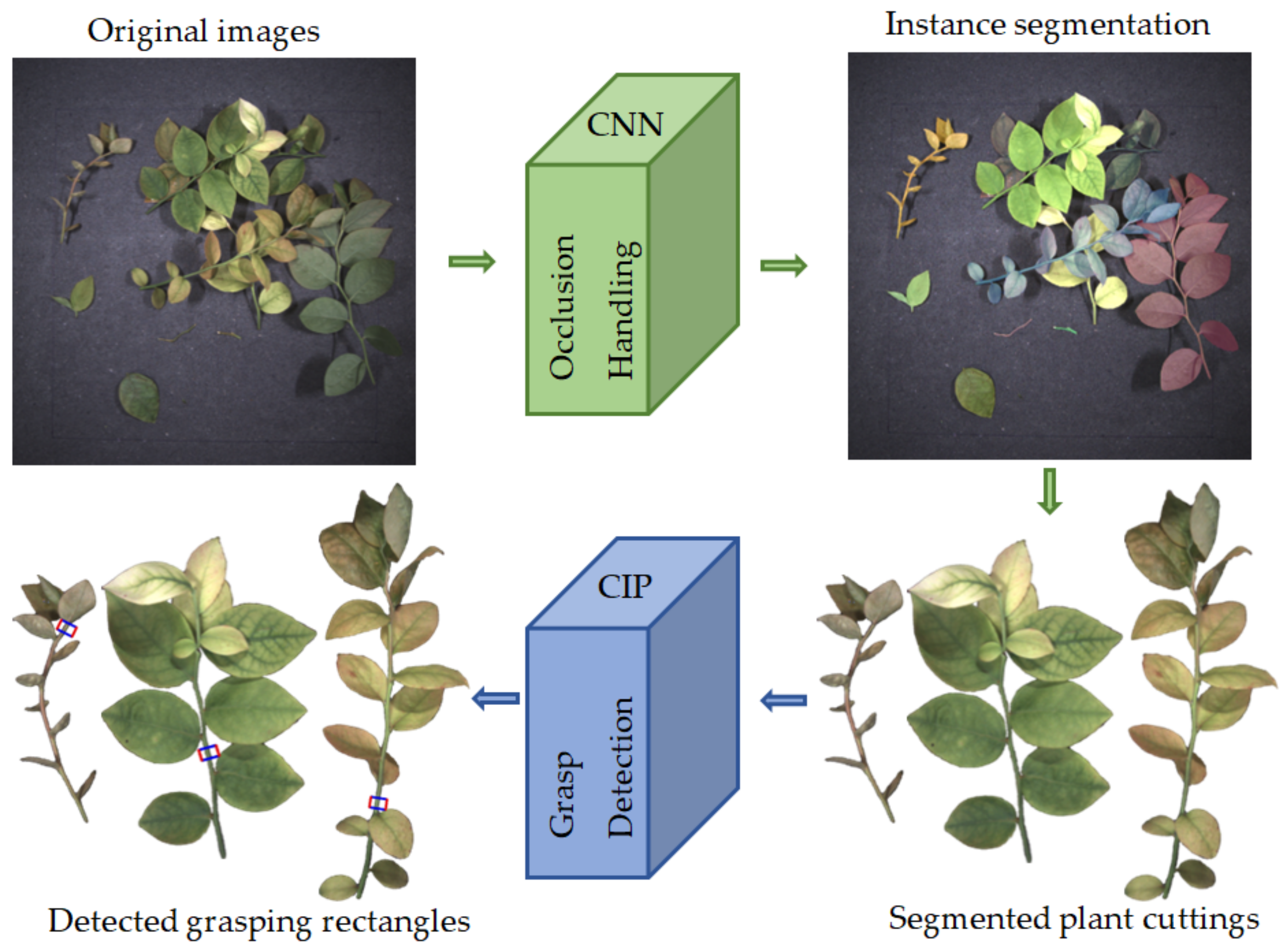
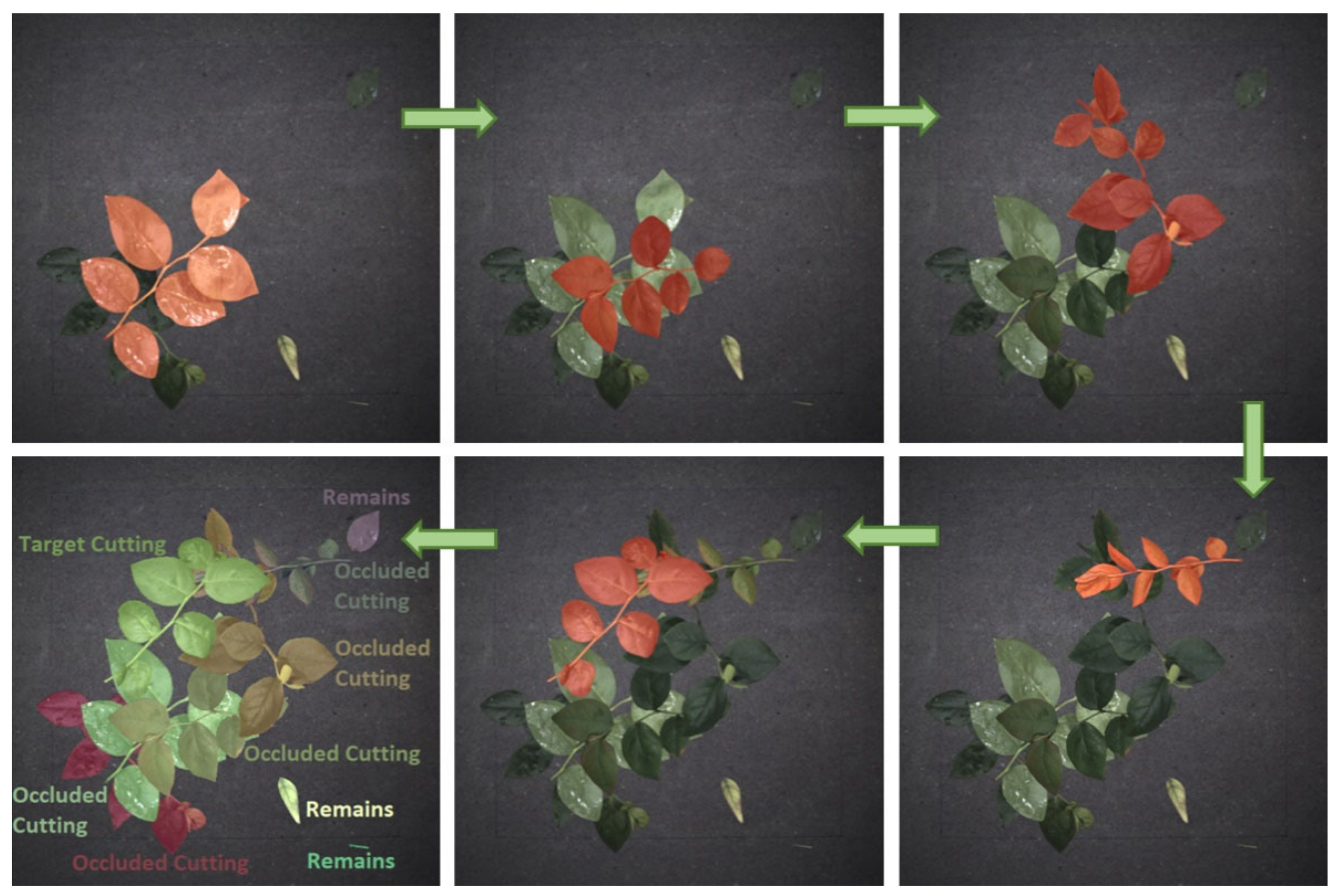
3.3. Occlusion Handling
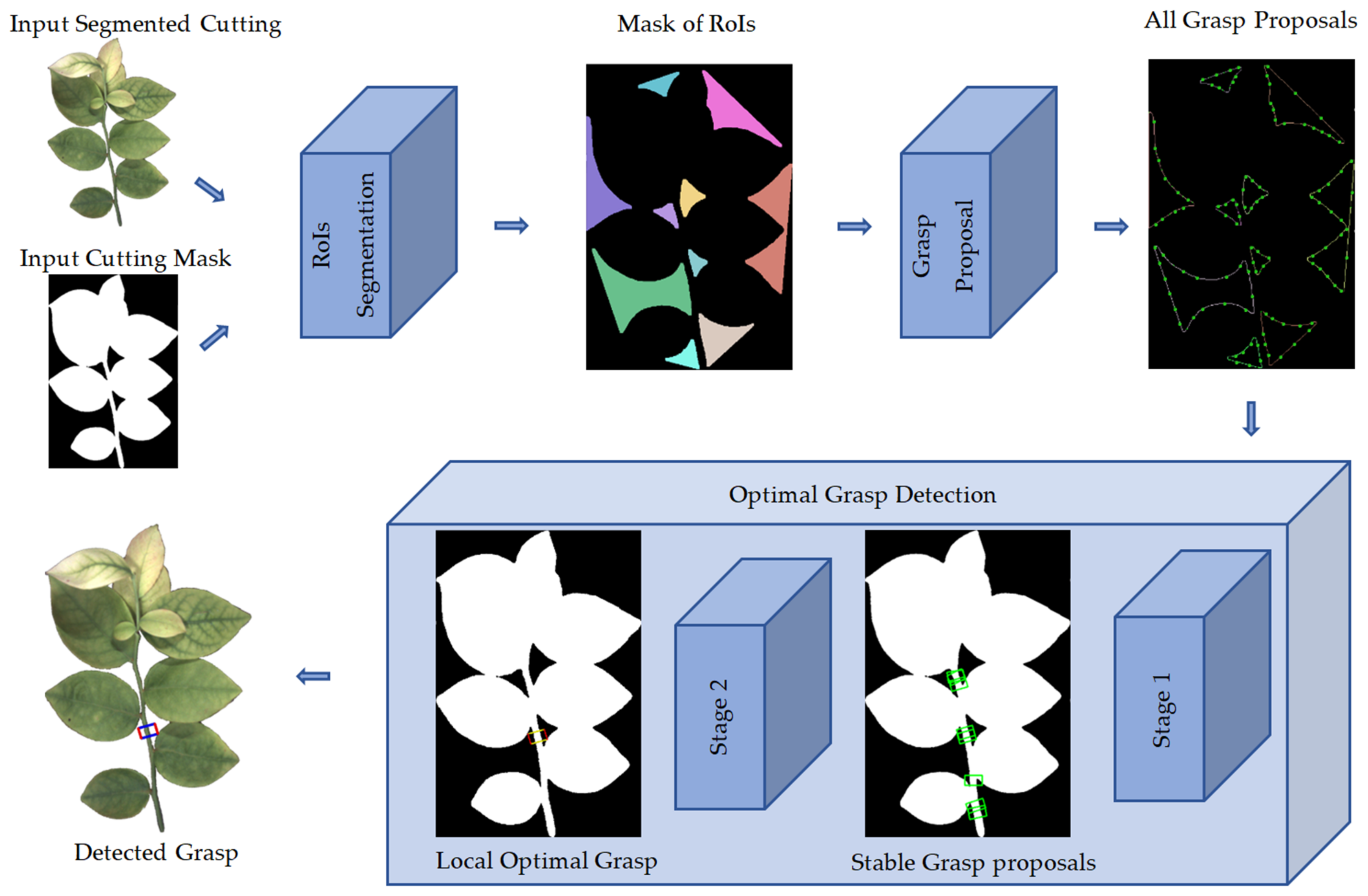
3.4. Grasp Detection
- The center of the gripper (center of the oriented rectangle) must be on the stem of the plant cutting.
- The orientation of the predicted grasp should be aligned with the direction of the plant cutting’s stem.
- The grasping point must have sufficient distance to the plant leaves to accommodate the open gripper and to avoid collision with leaves.
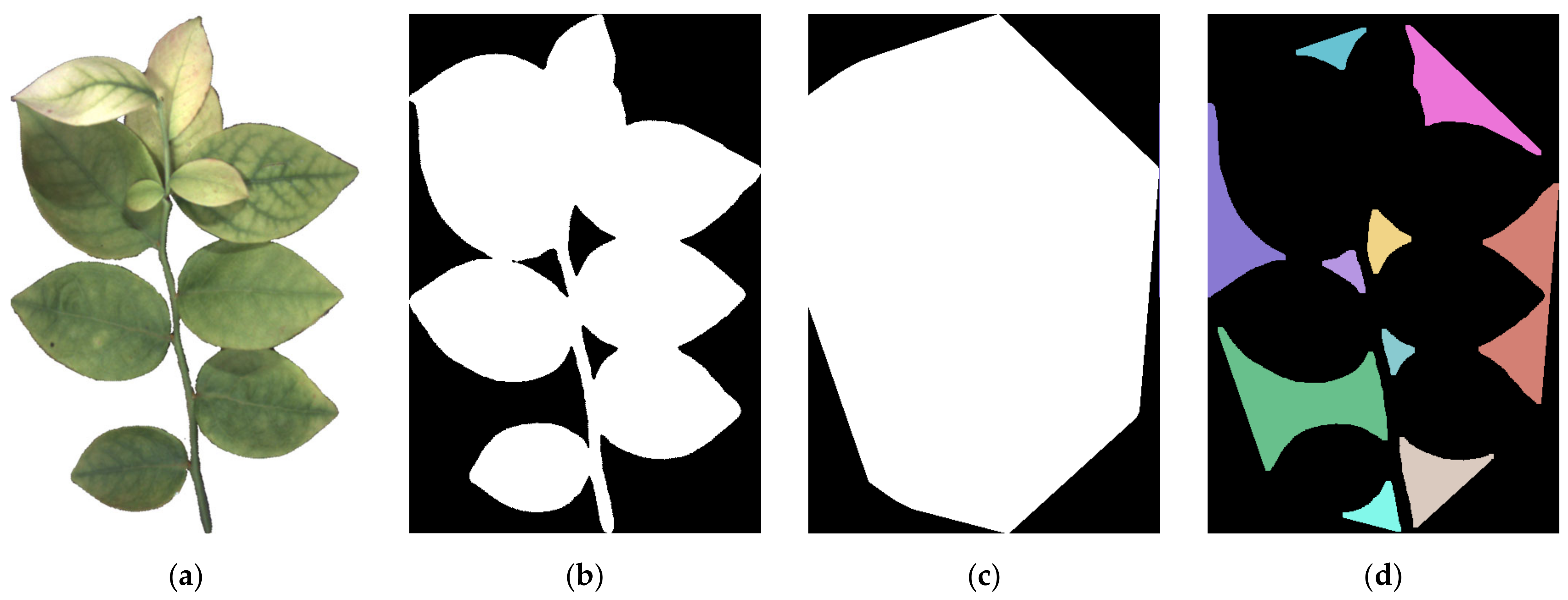
3.4.1. Regions of Interest (RoIs) Segmentation
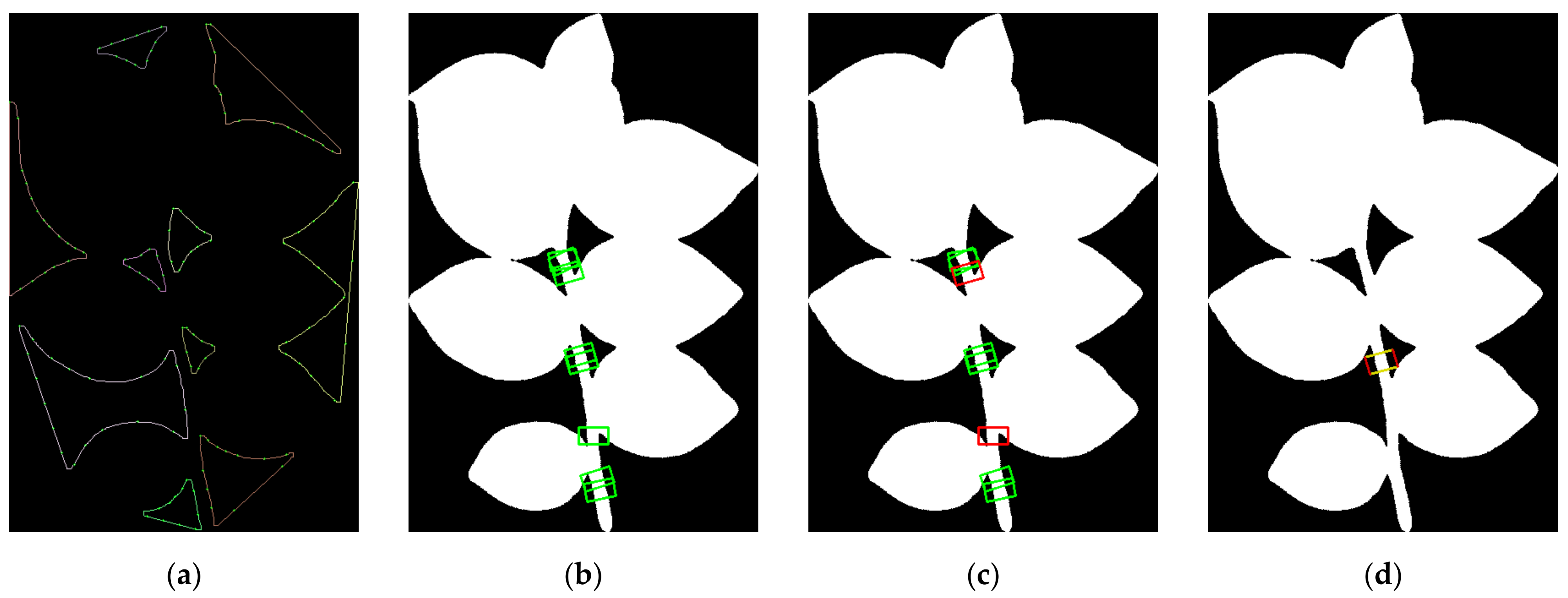
3.4.2. Grasp Proposal
3.4.3. Optimal Grasp Detection
4. Results and Discussion
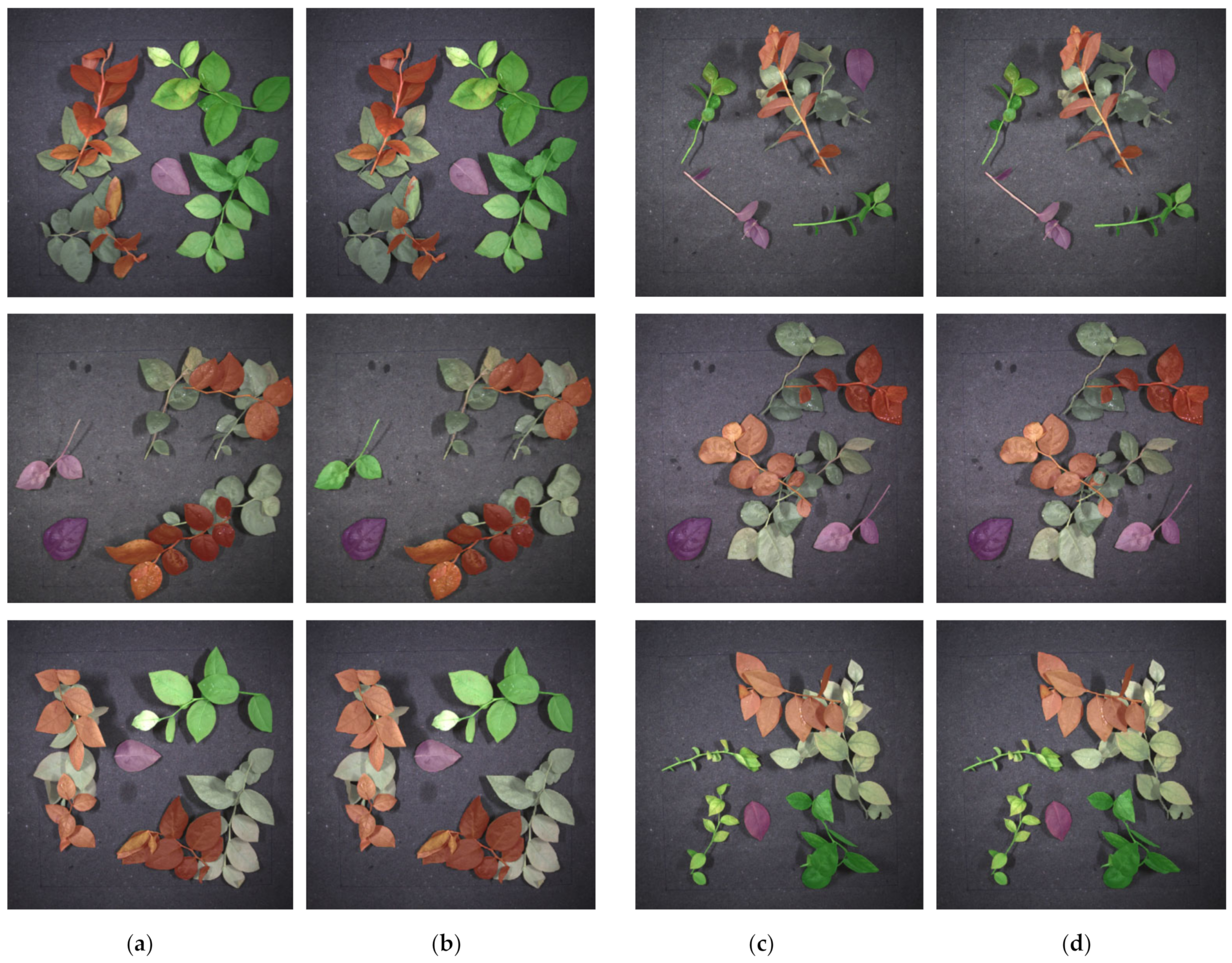
4.1. Occlusion Handling
4.2. Grasp Detection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Fujita, M.; Domae, Y.; Noda, A.; Ricardez, G.A.G.; Nagatani, T.; Zeng, A.; Song, S.; Rodriguez, A.; Causo, A.; Chen, I.M.; et al. What are the important technologies for bin picking? Technology analysis of robots in competitions based on a set of performance metrics. Adv. Robot. 2020, 34, 560–574. [Google Scholar] [CrossRef]
- Han, S.D.; Feng, S.W.; Yu, J. Toward Fast and Optimal Robotic Pick-And-Place on a Moving Conveyor. IEEE Robot. Autom. Lett. 2020, 5, 446–453. [Google Scholar] [CrossRef] [Green Version]
- Arents, J.; Greitans, M. Smart Industrial Robot Control Trends, Challenges and Opportunities within Manufacturing. Appl. Sci. 2022, 12, 937. [Google Scholar] [CrossRef]
- Bader, F.; Rahimifard, S. A methodology for the selection of industrial robots in food handling. Innov. Food Sci. Emerg. Technol. 2020, 64, 102379. [Google Scholar] [CrossRef]
- Atefi, A.; Ge, Y.; Pitla, S.; Schnable, J. Robotic Technologies for High-Throughput Plant Phenotyping: Contemporary Reviews and Future Perspectives. Front. Plant Sci. 2021, 12, 1082. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; van Henten, E.J. Stem localization of sweet-pepper plants using the support wire as a visual cue. Comput. Electron. Agric. 2014, 105, 111–120. [Google Scholar] [CrossRef]
- Jiao, Y.; Luo, R.; Li, Q.; Deng, X.; Yin, X.; Ruan, C.; Jia, W. Detection and localization of overlapped fruits application in an apple harvesting robot. Electronics 2020, 9, 1023. [Google Scholar] [CrossRef]
- Joffe, B.; Ahlin, K.; Hu, A.-P.; Mcmurray, G. Vision-guided robotic leaf picking. EasyChair Prepr. 2018, 250, 1–6. [Google Scholar] [CrossRef]
- Integrating Computer Vision into Horticulture Robots—Robovision. Available online: https://robovision.ai/case-study/iso-group-case-study/ (accessed on 22 February 2022).
- Atefi, A.; Ge, Y.; Pitla, S.; Schnable, J. Robotic Detection and Grasp of Maize and Sorghum: Stem Measurement with Contact. Robotics 2020, 9, 58. [Google Scholar] [CrossRef]
- Wada, K.; Kitagawa, S.; Okada, K.; Inaba, M. Instance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of Objects. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2048–2055. [Google Scholar] [CrossRef] [Green Version]
- Sofiiuk, K.; Barinova, O.; Konushin, A. AdaptIS: Adaptive Instance Selection Network. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop, Seoul, Korea, 27–28 October 2019; pp. 7354–7362. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, P.; Mais, L.; Kainmueller, D. PatchPerPix for Instance Segmentation. In Computer Vision—ECCV 2020, Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23—28 August 2020; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Vedaldi, A., Bischof, H., Brox, T., Frahm, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12370, pp. 288–304. [Google Scholar] [CrossRef]
- Zhang, S.-H.; Li, R.; Dong, X.; Rosin, P.; Cai, Z.; Han, X.; Yang, D.; Huang, H.; Hu, S.-M. Pose2Seg: Detection Free Human Instance Segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 889–898. [Google Scholar] [CrossRef] [Green Version]
- Salvador, A.; Bellver, M.; Campos, V.; Baradad, M.; Marques, F.; Torres, J.; Giro-i-Nieto, X. Recurrent Neural Networks for Semantic Instance Segmentation. arXiv 2017, arXiv:1712.00617. [Google Scholar]
- Böhm, A.; Ücker, A.; Jäger, T.; Ronneberger, O.; Falk, T. ISOODL: Instance segmentation of overlapping biological objects using deep learning. In Proceedings of the International Symposium on Biomedical Imaging, Wasington, DC, USA, 4–7 April 2018; pp. 1225–1229. [Google Scholar] [CrossRef]
- Georgakis, G.; Mousavian, A.; Berg, A.C.; Košecká, J. Synthesizing training data for object detection in indoor scenes. Robot. Sci. Syst. 2017, 13. [Google Scholar] [CrossRef]
- Yu, J.-G.; Li, Y.; Gao, C.; Gaoa, H.; Xia, G.-S.; Yub, Z.L.; Lic, Y.; Gao, H.; Yu, Z.L.; Li, Y. Exemplar-Based Recursive Instance Segmentation with Application to Plant Image Analysis. IEEE Trans. Image Process. 2020, 29, 389–404. [Google Scholar] [CrossRef]
- Dwibedi, D.; Misra, I.; Hebert, M. Cut, Paste and Learn: Surprisingly Easy Synthesis for Instance Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1310–1319. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 42, 386–397. [Google Scholar] [CrossRef]
- Do, T.T.; Nguyen, A.; Reid, I. AffordanceNet: An End-to-End Deep Learning Approach for Object Affordance Detection. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 5882–5889. [Google Scholar] [CrossRef] [Green Version]
- Ehsani, K.; Mottaghi, R.; Farhadi, A. SeGAN: Segmenting and Generating the Invisible. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6144–6153. [Google Scholar] [CrossRef] [Green Version]
- Follmann, P.; König, R. Oriented Boxes for Accurate Instance Segmentation. arXiv 2019, arXiv:1911.07732. [Google Scholar]
- Wei, A.H.; Chen, B.Y. Robotic object recognition and grasping with a natural background. Int. J. Adv. Robot. Syst. 2020, 17, 42–51. [Google Scholar] [CrossRef]
- Zhang, J.; Li, M.; Feng, Y.; Yang, C. Robotic grasp detection based on image processing and random forest. Multimed. Tools Appl. 2020, 79, 2427–2446. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.J.; Lee, F.F. An automatic machine vision-guided grasping system for Phalaenopsis tissue culture plantlets. Comput. Electron. Agric. 2010, 70, 42–51. [Google Scholar] [CrossRef]
- Yang, L.; Wei, Y.Z.; He, Y.; Sun, W.; Huang, Z.; Huang, H.; Fan, H. iShape: A First Step Towards Irregular Shape Instance Segmentation. arXiv 2021, arXiv:2109.15068. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common objects in context. In Computer Vision—ECCV 2014, Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 5—12 September 2014; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 8693, pp. 740–755. [Google Scholar] [CrossRef] [Green Version]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset for Semantic Urban Scene Understanding. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3213–3223. [Google Scholar] [CrossRef] [Green Version]
- Kirillov, A.; He, K.; Girshick, R.; Rother, C.; Dollár, P. Panoptic Segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 9396–9405. [Google Scholar] [CrossRef]
- Caldera, S.; Rassau, A.; Chai, D. Review of deep learning methods in robotic grasp detection. Multimodal Technol. Interact. 2018, 2, 57. [Google Scholar] [CrossRef] [Green Version]
- Lenz, I.; Lee, H.; Saxena, A. Deep Learning for Detecting Robotic Grasps. Int. J. Rob. Res. 2015, 34, 705–724. [Google Scholar] [CrossRef] [Green Version]
- Le, Q.V.; Kamm, D.; Kara, A.F.; Ng, A.Y. Learning to grasp objects with multiple contact points. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3–8 May 2010; pp. 5062–5069. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Moseson, S.; Saxena, A. Efficient Grasping from RGBD Images: Learning using a new Rectangle Representation. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3304–3311. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Bbox | Convex |
|---|---|---|
| COCO [28,29] | 0.14 | 0.07 |
| Cityscapes [28,30] | 0.15 | 0.09 |
| OC Human [15,28] | 0.25 | 020 |
| Occluded plants (normal occlusion) | 0.19 | 0.13 |
| Occluded plants (complex occlusion) | 0.28 | 0.20 |
| Classes | Normal Occlusion | Complex Occlusion | ||||
|---|---|---|---|---|---|---|
| PQTh | SQTh | RQTh | PQTh | SQTh | RQTh | |
| Singularized Cutting | 85.8 | 93.6 | 91.7 | 89.1 | 94.5 | 94.4 |
| Remains | 91.0 | 94.0 | 96.9 | 86.0 | 94.1 | 91.4 |
| Occluded Cutting | 76.5 | 88.5 | 86.5 | 72.0 | 83.2 | 86.5 |
| Target Cutting | 78.2 | 89.9 | 87.1 | 86.8 | 91.4 | 95.0 |
| Average | 82.9 | 91.5 | 90.6 | 83.5 | 90.8 | 91.8 |
| IoU | Rectangle Metric [%] | |||
|---|---|---|---|---|
| Angle 5° | Angle 15° | Angle 30° | Angle 45° | |
| 0.25 | 68 | 93 | 95 | 95 |
| 0.50 | 67 | 92 | 94 | 94 |
| 0.75 | 50 | 66 | 67 | 67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadzadeh Babr, M.; Faghihabdolahi, M.; Ristić-Durrant, D.; Michels, K. Deep Learning-Based Occlusion Handling of Overlapped Plants for Robotic Grasping. Appl. Sci. 2022, 12, 3655. https://doi.org/10.3390/app12073655
Mohammadzadeh Babr M, Faghihabdolahi M, Ristić-Durrant D, Michels K. Deep Learning-Based Occlusion Handling of Overlapped Plants for Robotic Grasping. Applied Sciences. 2022; 12(7):3655. https://doi.org/10.3390/app12073655
Chicago/Turabian StyleMohammadzadeh Babr, Mohammad, Maryam Faghihabdolahi, Danijela Ristić-Durrant, and Kai Michels. 2022. "Deep Learning-Based Occlusion Handling of Overlapped Plants for Robotic Grasping" Applied Sciences 12, no. 7: 3655. https://doi.org/10.3390/app12073655
APA StyleMohammadzadeh Babr, M., Faghihabdolahi, M., Ristić-Durrant, D., & Michels, K. (2022). Deep Learning-Based Occlusion Handling of Overlapped Plants for Robotic Grasping. Applied Sciences, 12(7), 3655. https://doi.org/10.3390/app12073655