
An Accurate State Visualization of Multiplexed and PWM Fed Peripherals in the Virtual Simulators of Embedded Systems



Abstract
:1. Introduction
2. Materials
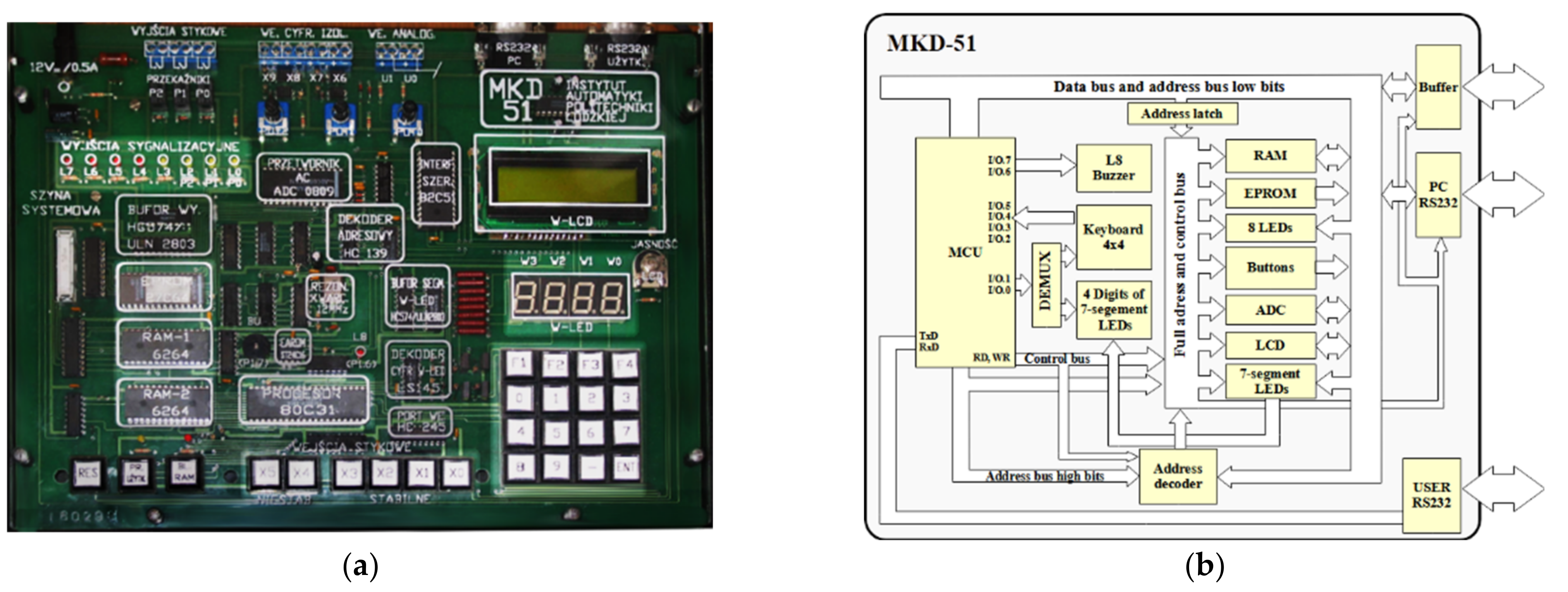
2.1. The MKD-51 Didactic System
2.2. The MKD51 SIM—A Virtual Simulator of Peripherals
2.3. Keil μVision IDE
3. Methods
3.1. The Problem Formulation
3.2. An Algorithm for Visualizing Peripherals Fed by High Rate Input Signal
3.3. Experimental Setup
3.4. Calculating the Peripheral Image Corresponding to the Averaged Input Signal
4. Results
4.1. Multiplexed Seven-Segment LED Displays Visualization
4.2. Visualization of the LEDs Fed by PWM in the Simulator
- Any non-corresponding to LEDs brightness image parts were removed;
- Image histograms were stretched to trim brightness below graphical representation of 0% of diode PWM and to achieve comparable parts of diodes graphical representation for 100% of PWM;
- The brightness levels from 0 to 0.3 were removed from images to avoid shadows and afterglows influence on results [25].
4.3. LED Brightness Mapping for Accurate Visualization
5. Discussion
- Visualizing multiplexing seven-segment LED displays is satisfyingly accurate without any additional modification to proposed visualization algorithm. After image normalization a W2 LED module brightness is almost the same, in a statistic manner, as for real hardware. The difference of statistics is at level 0.02 for the mean value and 0.01 for the median. The conclusion can be extended to results analysis without an image normalization as a comparable relation between any two LED digits brightness which are almost identical for a virtual and a real peripheral;
- Comparison of real and virtual LED bar visualization accuracy cannot be carried out reliable using only histogram statistics. This is caused by size changing of real image representation of LEDs along with their brightness. An additional feature is needed, which was taken into account;
- More accurate result analysis can introduce the resulting compound brightness factor as a multiplication of relative image size, expressed as a relation of non-zero pixels counts of two LEDs (analyzed and fully driven), and chosen histogram statistics. Based on this, the set of factors can be achieved that are more suitable for direct comparison (Figure 8 and Figure 9).
- As shown in Figure 8 and Figure 9, the proposed algorithm of LEDs visualization is following changes in controlled LED perceived brightness. In the case of implemented algorithm without additional brightness compensation, its perceived brightness was considered to be far insufficient in receipt. Using additional fmap function, correcting visualized LED brightness was carried out. Although analysis of relative factors indicate that the compensation could be more intensive, final visualization results perceived by the human eye deemed sufficient. The a and b correction factors, chosen in the fmap function, have been selected empirically in order to obtain more appropriate visual representation of simulated peripheral behavior. They were not selected analytically or optimally, which may be the subject of potential further research, as well as the class of fmap functions modifying brightness, which may be more closely related to the visualized type of LED or another peripheral object.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Scherp, A. Software development process model and methodology for virtual laboratories. In Proceedings of the 20th IASTED International Conference on Applied Informatics, Innsbruck, Austria, 18–21 February 2002. [Google Scholar]
- Beghi, A.; Marcuzzi, F.; Martin, P.; Tinazzi, F.; Zigliotto, M. Virtual prototyping of embedded control software in mechatronic systems: A case study. Mechatronics 2017, 43, 99–111. [Google Scholar] [CrossRef]
- Engblom, J. Using Simulation Tools for Embedded Software Development. In Proceedings of the Embedded Systems Conference, San Jose, CA, USA, 14–18 April 2008. [Google Scholar]
- Cho, S.-Y. A virtual simulation package for Embedded System training and education. In Proceedings of the 2009 International Conference on Engineering Education (ICEED), Kuala Lumpur, Malaysia, 7–8 December 2009; pp. 72–76. [Google Scholar]
- Cruz-Miguel, E.; Rodriguez, J.; García-Martínez, J.; Camarillo-Gómez, K.; Pérez-Soto, G. Field-programmable gate array-based laboratory oriented to control theory courses. Comput. Appl. Eng. Educ. 2019, 27, 1253–1266. [Google Scholar] [CrossRef] [Green Version]
- Xie, W.; Yang, X.; Li, F. A virtual laboratory platform and simulation software based on web. In Proceedings of the 2008 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1650–1654. [Google Scholar]
- Khant, S.; Patel, A. COVID19 remote engineering education: Learning of an embedded system with practical perspective. In Proceedings of the International Conference on Innovative Practices in Technology and Management (ICIPTM 2021), Noida, India, 17–19 February 2021. [Google Scholar]
- Rodriguez-Segura, L.; Zamora-Antuñano, M.A.; Rodriguez-Resendiz, J.; Paredes-García, W.J.; Altamirano-Corro, J.A.; Cruz-Pérez, M.Á. Teaching Challenges in COVID-19 Scenery: Teams Platform-Based Student Satisfaction Approach. Sustainability 2020, 12, 7514. [Google Scholar] [CrossRef]
- Engblom, J. On Hardware and Hardware Models for Embedded Real-Time Systems. In Proceedings of the IEEE Workshop on Real-Time Embedded Systems (WRTES 2001), London, UK, 3 December 2001. [Google Scholar]
- Schnerr, J.; Bringmann, O.; Viehl, A.; Rosenstiel, W. High-performance timing simulation of embedded software. In Proceedings of the 45th annual conference on Design automation—DAC ’08, Anaheim, CA, USA, 8–13 June 2008; p. 290. [Google Scholar]
- Lee, J.; Park, G.; Shin, J.; Lee, J.; Sreenan, C.; Yoo, S. SoEasy: A Software Framework for Easy Hardware Control Programming for Diverse IoT Platforms. Sensors 2018, 18, 2162. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Microprocessor Systems Laboratory. Available online: http://ztchs.p.lodz.pl/index.php?www=SM (accessed on 20 February 2022).
- Institute of Automatic Control, Lodz University of Technology. Available online: https://www.automatyka.p.lodz.pl/?lang=en (accessed on 19 February 2022).
- Mroczek, H. Microprocessor Technique (In Polish); Lodz Uniwersity of Technology Press: Łódź, Poland, 2007; ISBN 978-83-7283-238-2. [Google Scholar]
- Bolanakis, D.E. A Survey of Research in Microcontroller Education. IEEE Rev. Iberoam. Tecnol. de Aprendiz. 2019, 14, 50–57. [Google Scholar] [CrossRef]
- Adi, P.D.P.; Kitagawa, A.; Sihombing, V.; Silaen, G.J.; Mustamu, N.E.; Siregar, V.M.M.; Sianturi, F.A.; Purba, W. A Study of Programmable System on Chip (PSoC) Technology for Engineering Education. J. Phys. Conf. Ser. 2021, 1899, 012163. [Google Scholar] [CrossRef]
- Microchip Studio for AVR® and SAM Devices. Available online: https://www.microchip.com/en-us/tools-resources/develop/microchip-studio (accessed on 19 February 2022).
- CCSTUDIO. Code Composer StudioTM Integrated Development Environment (IDE). Available online: https://www.ti.com/tool/CCSTUDIO (accessed on 19 February 2022).
- µVision® IDE. Available online: https://www2.keil.com/mdk5/uvision/ (accessed on 19 February 2022).
- Nayyar, A. An Encyclopedia Coverage of Compiler’s, Programmer’s & Simulator’s for 8051, PIC, AVR, ARM, Arduino Embedded Technologies. Int. J. Reconfigurable Embed. Syst. 2016, 5, 18. [Google Scholar] [CrossRef]
- Lyons, R.G. Understanding Digital Signal. Processing; Addison Wesley Pub Co., Inc., Pearson: Boston, MA, USA, 2010; ISBN 9780137027415. [Google Scholar]
- Popovic, V.; Afshari, H.; Schmid, A.; Leblebici, Y. Real-time implementation of Gaussian image blending in a spherical light field camera. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; IEEE: Piscataway, NJ, USA; pp. 1173–1178.
- Im, J.; Jeon, J.; Hayes, M.; Paik, J. Single image-based ghost-free high dynamic range imaging using local histogram stretching and spatially-adaptive denoising. IEEE Trans. Consum. Electron. 2011, 57, 1478–1484. [Google Scholar] [CrossRef]
- Myasnikova, E.; Samsonova, M.; Kosman, D.; Reinitz, J. Removal of background signal from in situ data on the expression of segmentation genes in Drosophila. Dev. Genes Evol. 2005, 215, 320–326. [Google Scholar] [CrossRef] [PubMed]
- Kirberger, R.M. Imaging artifacts in diagnostic ultrasound—A review. Vet. Radiol. Ultrasound 1995, 36, 297–306. [Google Scholar] [CrossRef]
- Park, H.J.; Kim, K.B. Estimation of object location probability for object detection using brightness feature only. Int. J. Electr. Comput. Eng. 2019, 9, 5227. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Q. Enhancing computational integral imaging performance using an interpolation method based on non-zero-pixel derivation. Appl. Opt. 2010, 49, 3997. [Google Scholar] [CrossRef] [PubMed]
- Maini, R.; Aggarwal, H. A Comprehensive Review of Image Enhancement Techniques. arXiv 2010, arXiv:1003.4053. [Google Scholar]
- Kaur, H.; Sohi, N. A Study for Applications of Histogram in Image Enhancement. Int. J. Eng. Sci. 2017, 6, 59–63. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Wei, L.; Hsu, W. A Multi-Pronged Evaluation for Image Normalization Techniques. In Proceedings of the 2021 IEEE 18th International Symposium on Biomedical Imaging (ISBI), Nice, France, 13–16 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1292–1296. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analyzed Statistics | W2 Digit | W1 Digit | W0 Digit |
|---|---|---|---|
| MKD-51 brightness mean MKD-51 SIM brightness mean | 0.06 | 0.18 | 0.25 |
| 0.05 | 0.16 | 0.25 | |
| MKD-51 brightness median MKD-51 SIM brightness median | 0.05 | 0.17 | 0.29 |
| 0.06 | 0.18 | 0.29 |
| Analyzed Feature | L6 | L5 | L4 | L2 | L1 | L0 |
|---|---|---|---|---|---|---|
| MKD-51 non-zero pixels ratio MKD-51 SIM non-zero pixels ratio | 0.47 | 0.75 | 1 | 0.44 | 0.78 | 1 |
| 0.42 | 0.85 | 1 | 0.13 | 0.43 | 1 | |
| MKD-51 brightness mean MKD-51 SIM brightness mean | 0.48 | 0.62 | 0.63 | 0.41 | 0.73 | 0.8 |
| 0.19 | 0.27 | 0.81 | 0.15 | 0.19 | 0.89 | |
| MKD-51 brightness median MKD-51 SIM brightness median | 0.46 | 0.58 | 0.58 | 0.41 | 0.82 | 0.98 |
| 0.2 | 0.28 | 0.81 | 0.12 | 0.2 | 0.9 |
| Analyzed Feature | L6 | L5 | L4 | L2 | L1 | L0 |
|---|---|---|---|---|---|---|
| MKD-51 non-zero pixels ratio MKD-51 SIM non-zero pixels ratio W MKD-51 SIM non-zero pixels ratio N | 0.47 | 0.75 | 1 | 0.44 | 0.78 | 1 |
| 0.73 | 0.9 | 1 | 0.28 | 0.94 | 1 | |
| 0.42 | 0.85 | 1 | 0.13 | 0.43 | 1 | |
| MKD-51 brightness mean MKD-51 SIM brightness mean W MKD-51 SIM brightness mean N | 0.48 | 0.62 | 0.63 | 0.41 | 0.73 | 0.8 |
| 0.22 | 0.42 | 0.81 | 0.17 | 0.25 | 0.9 | |
| 0.19 | 0.27 | 0.81 | 0.15 | 0.19 | 0.9 | |
| MKD-51 brightness median MKD-51 SIM brightness median W MKD-51 SIM brightness median N | 0.46 | 0.58 | 0.58 | 0.41 | 0.82 | 0.98 |
| 0.2 | 0.44 | 0.81 | 0.16 | 0.25 | 0.9 | |
| 0.2 | 0.28 | 0.81 | 0.12 | 0.2 | 0.9 |
| Analyzed Statistics | L6 | L5 | L4 | L2 | L1 | L0 |
|---|---|---|---|---|---|---|
| MKD-51 non-zero pixels ratio MKD-51 SIM non-zero pixels ratio W MKD-51 SIM non-zero pixels ratio N | 0.65 | 0.9 | 1 | 0.73 | 0.95 | 1 |
| 0.9 | 0.97 | 1 | 0.94 | 0.98 | 1 | |
| 0.85 | 0.95 | 1 | 0.43 | 0.96 | 1 | |
| MKD-51 brightness mean MKD-51 SIM brightness mean W MKD-51 SIM brightness mean N | 0.71 | 0.73 | 0.72 | 0.7 | 0.76 | 0.78 |
| 0.42 | 0.6 | 0.81 | 0.25 | 0.45 | 0.9 | |
| 0.27 | 0.54 | 0.81 | 0.19 | 0.32 | 0.9 | |
| MKD-51 brightness median MKD-51 SIM brightness median W MKD-51 SIM brightness median N | 0.77 | 0.82 | 0.8 | 0.76 | 0.92 | 0.94 |
| 0.44 | 0.59 | 0.81 | 0.25 | 0.44 | 0.9 | |
| 0.28 | 0.55 | 0.81 | 0.2 | 0.31 | 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radecki, A.; Rybicki, T. An Accurate State Visualization of Multiplexed and PWM Fed Peripherals in the Virtual Simulators of Embedded Systems. Appl. Sci. 2022, 12, 3137. https://doi.org/10.3390/app12063137
Radecki A, Rybicki T. An Accurate State Visualization of Multiplexed and PWM Fed Peripherals in the Virtual Simulators of Embedded Systems. Applied Sciences. 2022; 12(6):3137. https://doi.org/10.3390/app12063137
Chicago/Turabian StyleRadecki, Andrzej, and Tomasz Rybicki. 2022. "An Accurate State Visualization of Multiplexed and PWM Fed Peripherals in the Virtual Simulators of Embedded Systems" Applied Sciences 12, no. 6: 3137. https://doi.org/10.3390/app12063137
APA StyleRadecki, A., & Rybicki, T. (2022). An Accurate State Visualization of Multiplexed and PWM Fed Peripherals in the Virtual Simulators of Embedded Systems. Applied Sciences, 12(6), 3137. https://doi.org/10.3390/app12063137