
Design and Optimization of a Boat-Bottom-Shaped Transplanting Device for Sweet Potato (Ipomoea batatas) with Low Seedling Damage Rate


Abstract
:1. Introduction
2. Structural Design
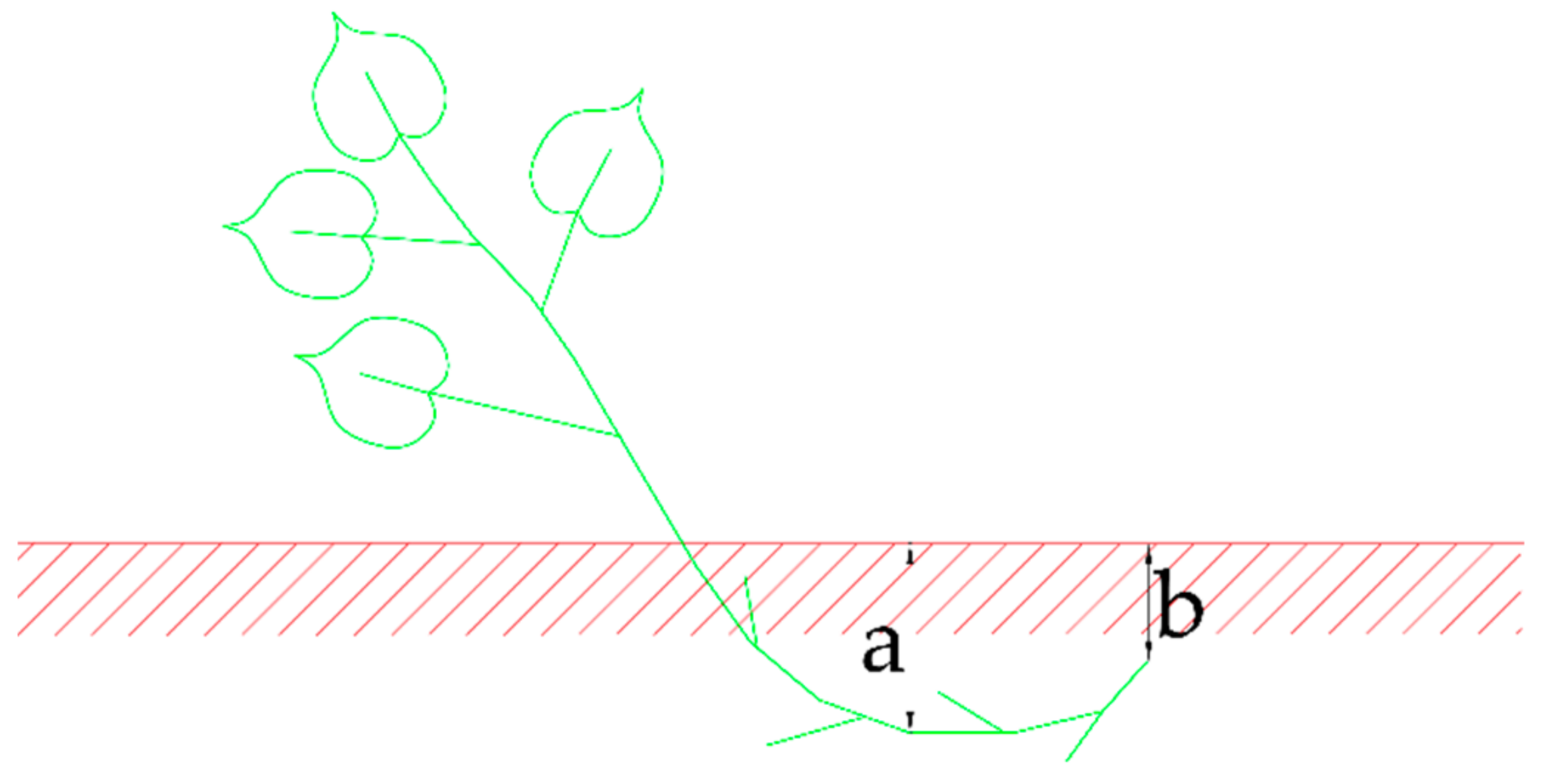
2.1. Agronomic Requirements for Boat-Bottom-Shaped Transplanting
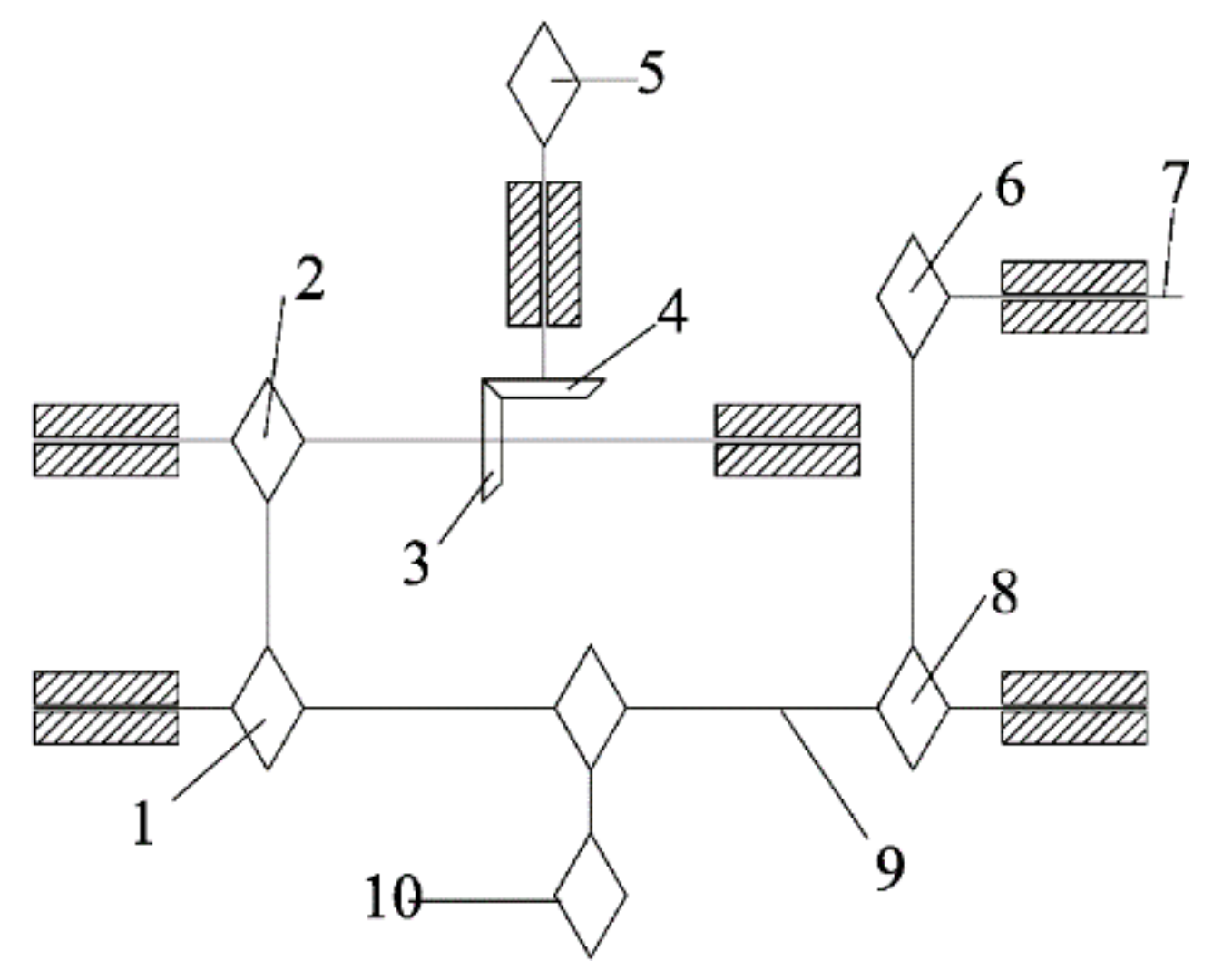
2.2. Overall Structure and Working Principle
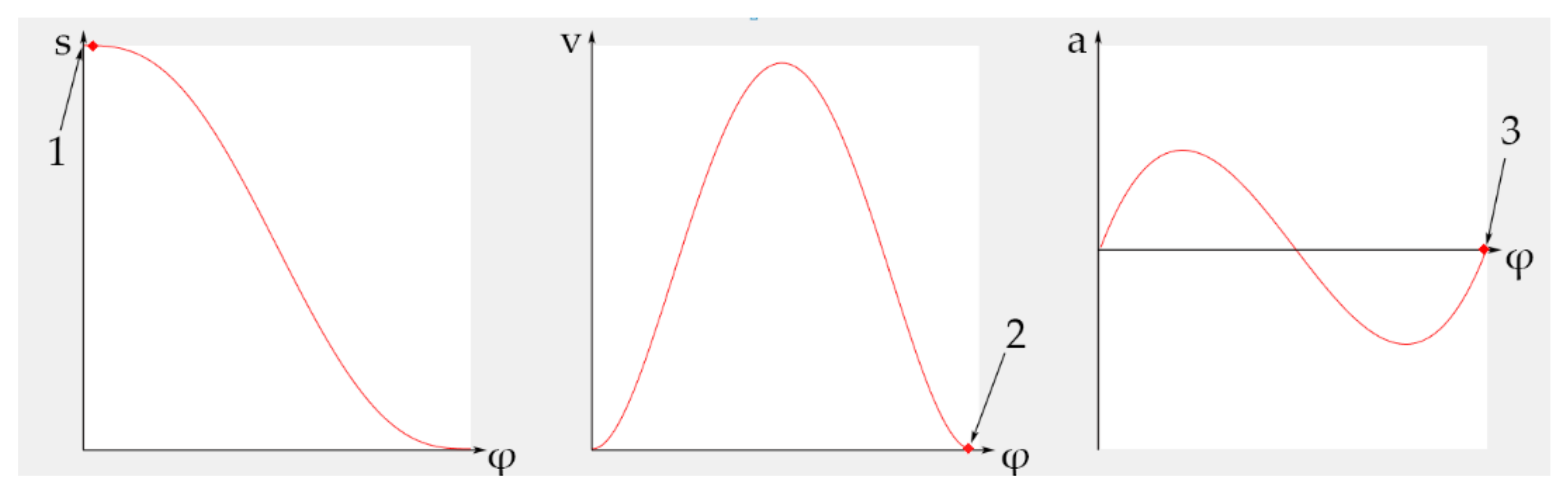
2.3. Kinematic Analysis of Four-Bar Mechanism
2.4. Determination of Parameters of Four-Bar Mechanism
2.5. Designing to Prevent Damage Seedlings
3. Materials and Methods
3.1. Key Performance Parameters of Planting Mechanism
3.1.1. QRNDSM
3.1.2. QRSRD
3.1.3. QRSLS
3.2. Determine the Scope of Test Factors
3.2.1. Analysis of Crank Rotation Speed Range
3.2.2. Analysis of the Range of Transplanting Depth
3.3. Field Test Materials
3.4. Methods of Field Test
4. Results and Discussion
4.1. Filed Test Results
4.2. Filed Test Regression Analysis
4.3. Filed Test Interaction Analysis
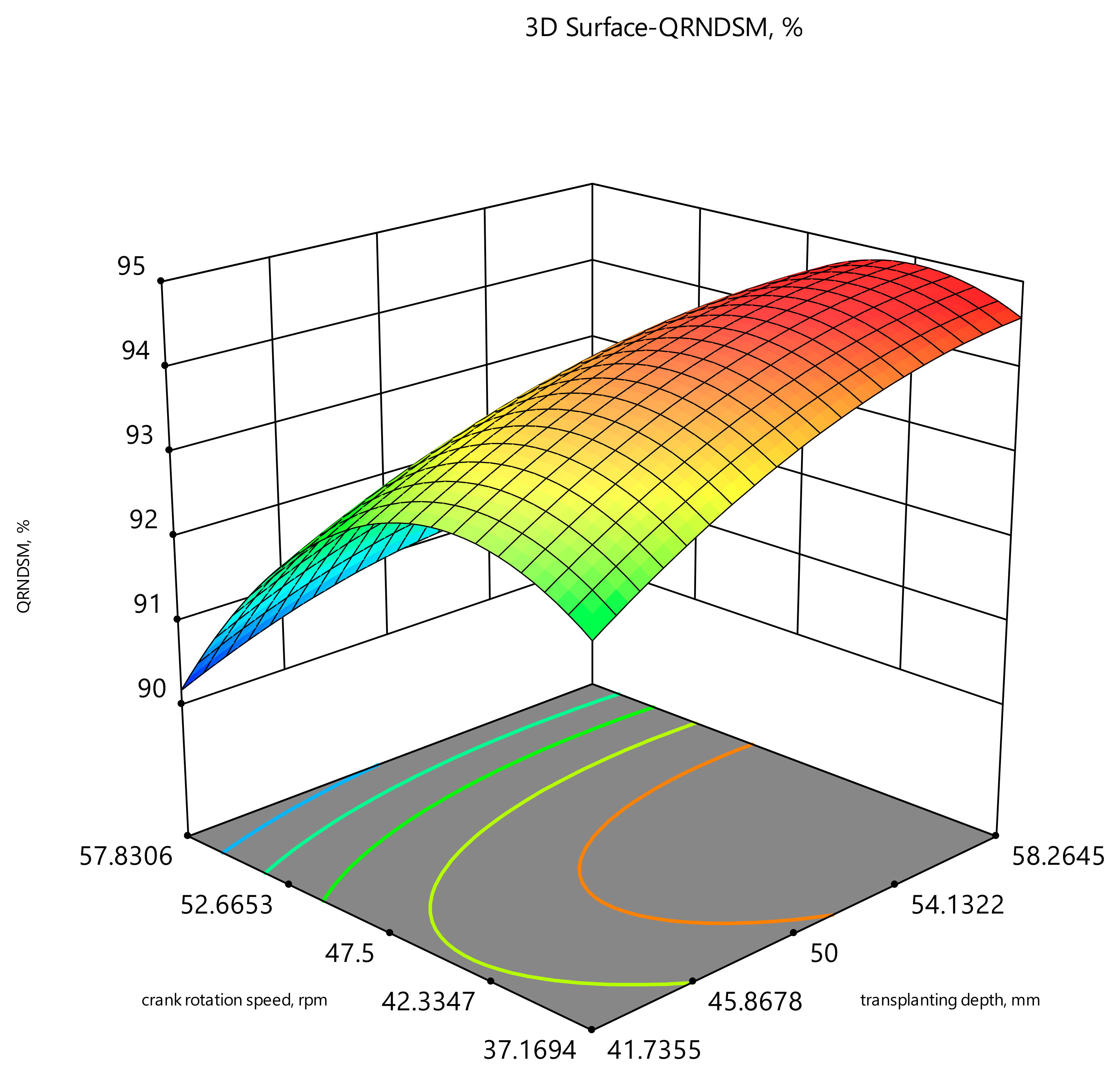
4.3.1. Influence of Transplanting Depth and Crank Rotation Speed on QRNDSM
4.3.2. Influence of Transplanting Depth and Crank Rotation Speed on QRSRD
4.3.3. Influence of Transplanting Depth and Crank Rotation Speed on QRSLS
4.4. Comparison and Field Test Performance Optimization
5. Conclusions
- (1)
- In order to carry out boat-bottom-shaped transplanting for sweet potato, we studied the basic parameters of the transplanting device theoretically. Then, we collected and sorted the information on the existing transplanting machine and analyzed the transplanting device’s movement trajectory to ensure its rationality and reliability. Next, we combined the characteristics of boat-bottom-shaped transplanting, designed the transplanting manipulator and the transplanting conveying device to move synchronously, and selected the movement track of the transplanting manipulator to realize the boat-bottom-shaped transplantation of sweet potato seedlings.
- (2)
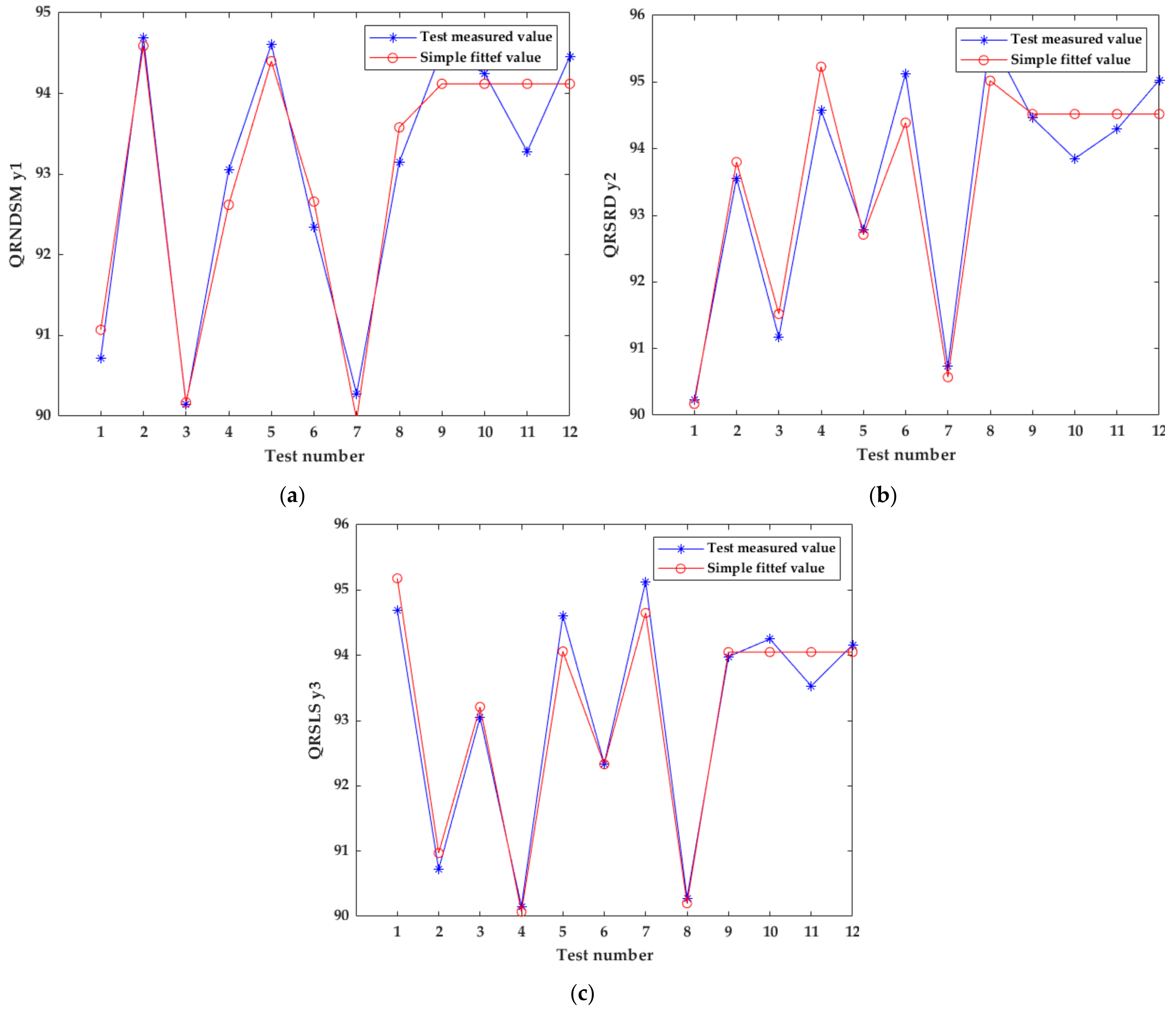
- Through the analysis of the agronomic requirements for the boat-bottom-shaped transplanting of sweet potato and the mechanical properties of soil, the transplanting depth and crank rotation speed were used as test factors. We determined that the transplanting depth range is 40–60 mm, and the crank rotation speed range is 35–60 rpm. In field tests, QRNDSM, QRSRD, and QRSLS were used as the test evaluation indexes, and binary regression and orthogonal combination tests were carried out. After processing and analyzing the test data, three quadratic regression models of the three test evaluation indexes were obtained. The significance analysis of the regression coefficients shows that the regression models have high degrees of fit. At the same time, the experimentally measured values of the three regression models are close to the fitted values.
- (3)
- Through the analysis of the interaction of the two factors, it can be concluded that the interaction of the two factors has a significant impact on the three test evaluation indicators. Through optimized calculation, the optimal parameter ranges of the transplanting device were obtained: the transplanting depth was in the range of 45.56–58.26 mm, and the crank rotation speed was in the range of 39.39–43.45 rpm. In the field verification test, the maximum QRNDSM was 94.91%, the maximum QRSRD was 95.42%, and the maximum QRSLS was 94.93%.
- (4)
- Boat-bottom-shaped transplanting has higher yield than the current common oblique transplanting method, so growers are more willing to choose this system to increase sweet potato yields. This supply–demand relationship has brought considerable benefits to both farmers and producers. Field tests show that the qualified rate of each test index is above 90%, which proves that the machine has high reliability and stability. However, the automatic seedling separation technology of sweet potato remains an unsolved problem around the world—the future research aim of our team is to solve it.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, L.; Hu, Z.; Xie, Y.; Tian, L.; Ji, F.; Wang, B. Study on the route of mechanization of sweet potato production technology in China. Chin. Agric. Mech. 2011, 6, 20–25. [Google Scholar] [CrossRef]
- Hou, M.; Li, Q.; Xin, G.; Wu, W.; Wang, L.; Wang, X.; Zhang, Y.; Tang, Z.; Tang, W.; Li, X.; et al. Variability of sweet potato storage root under different ecological environments and its correlation with quality traits. Chin. J. Eco-Agric. 2013, 21, 1095–1099. [Google Scholar] [CrossRef]
- Li, H. Development status of sweet potato mechanization industry at home and abroad. Jiangsu Agric. Mech. 2010, 2, 40–42. [Google Scholar] [CrossRef]
- Hu, L.; Ji, F.; Wang, B.; Ling, X.; Hu, Z.; Yu, X. Latest development of sweet potato mechanical transplanting in China. J. Chin. Agric. Mech. 2015, 36, 289–291. [Google Scholar] [CrossRef]
- Wu, Y.; Gong, Z.; Chang, G.; Zhu, Y. Design and Experiment of Type 2ZLF-2 Duplex Sweet Potato Transplanter. Agric. Equip. Veh. Eng. 2021, 59, 54–57. [Google Scholar] [CrossRef]
- Ma, B.; Hu, L. Status about sweet potato planting and its production machinery in China. Chin. Agric. Mech. 2013, 1, 42–46. [Google Scholar]
- Fang, B.; Zhang, X.; Chen, J.; An, K. Research history and present situation sweet potato germplasm resource in China. Guangdong Agric. Sci. 2004, B12, 3–5. [Google Scholar] [CrossRef]
- Li, R.; Zhao, J.; Zhang, X.; Zhang, Z.; Wang, L. Relationship between transplanting methods and yield characters of sweet potato. Crops 2015, 5, 164–166. [Google Scholar] [CrossRef]
- Teng, Y. Effect of Vine Character on Growth and Development and Yield of Xushu 22; Southwest University: Chongqing, China, 2014. [Google Scholar]
- Shen, S.F.; Wu, L.H.; Li, B. Studies on ridge plowing ways of spring sweet potato. Acta Agric. Zhejiangensis 2014, 26, 549–555. [Google Scholar]
- Ma, D.F.; Li, Q.; Cao, Q.H. Development and prospect of sweet potato industry and industrial technology in China. Jiangsu J. Agric. Sci. 2012, 28, 969–973. [Google Scholar]
- Ma, B.; Hu, L.L.; Xu, L.Y.; Tian, L.J.; Ji, F.J.; Wang, B. Domestic sweet potato planting and its production machinery. Chin. Agric. Mech. 2013, 1, 42–46. [Google Scholar]
- Xiang, W.; Wu, M.L.; Guan, C.Y. Design and experiment of planting hole forming device of crawler transplanter for rape (Brassica napus) seedlings. Trans. Chin. Soc. Agric. Eng. 2015, 31, 12–18. [Google Scholar]
- Lu, Y.T.; Li, Y.X.; Liu, Y. Analysis on the status of transplanting machine and transplanting technology at home and abroad. Xinjiang Agric. Mech. 2011, 3, 29–32. [Google Scholar]
- Li, X.Y.; Wang, Y.W.; Lu, G.C. Optimization design and test of dibble-type transplanting device. Trans. Chin. Soc. Agric. Eng. 2015, 31, 58–64. [Google Scholar]
- Wang, M.M.; Song, J.N.; Liu, C.L. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 49–56. [Google Scholar]
- Hu, L.L.; Wang, B.; Wang, G.P.; Yu, Z.Y.; You, Z.Y.; Hu, Z.C. Design and experiment of 2zgf-2 type sweet potato compound transplanter. Trans. Chin. Soc. Agric. Eng. 2016, 32, 16–24. [Google Scholar]
- Zhu, B. Design and Simulation of the Seedling Transplanting Machine with Sandwich Type Sweet Potato; Shandong Agricultural University: Tai’an, China, 2017. [Google Scholar]
- Zhang, T. Design and Experiment of Transplanting Device for Naked Sweet Potato Seedlings on Film based on “Boat Shape” Posture; Shandong Agricultural University: Taian, China, 2021. [Google Scholar] [CrossRef]
- Xu, G.; Liu, H.; Jian, S.; Shi, S.; He, T. Design and Test of Transplanting Mechanism on Mulch-film of Salvia miltiorrhiza Based on Five-bar Mechanism. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 55–65. [Google Scholar] [CrossRef]
- Chen, J. Design and Research on the Control System of Precise Planting of Sweet Potato Seedlings. Guangxi Univ. 2021. [Google Scholar] [CrossRef]
- Zhuang, R. Optimization Design and Experimental Study on Transplanting Mechanism of Sweet Potato Seed Seedlings. Zhejiang Sci-Tech Univ. 2021. [Google Scholar] [CrossRef]
- Sweet Potato Compound Planting Machine Group Standard. China Agricultural Machinery Industry Association: Beijing, China, 2020.
- Yun, Z. Analysis and Synthesis of Agricultural Machinery; China Machine Press: Hangzhou, China, 2008; ISBN 978-7-111-25000-5. [Google Scholar]
- Shi, Y.; Wu, Y. Cam Mechanism Design and Application Innovation; Machinery Industry Press: Beijing, China, 2007; ISBN 978-7-111-21936-1. [Google Scholar]
- He, Y. Experimental Design and Analysis; Chemical Industry Press: Beijing, China, 2013. [Google Scholar]
- Hu, L.; Wang, B.; Wang, G.; Yu, Z.; You, Z.; Hu, Z.; Wang, B.; Gao, X. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter. Int. J. Agric. Biol. Eng. 2016, 32, 8–16. [Google Scholar]
- Yu, Y.; Qin, W.; Lai, Q.; Zhang, H. Design and Experiment of Planting Mechanism of Cauliflower Pot Seedling Transplanter, Transactions of the Chinese Society for Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2020, 51, 102–112. [Google Scholar] [CrossRef]
- Zhang, J.; Niu, Z.; Li, T.; Wu, Y.; Xi, R.; Li, G.; Hou, J. Design and Optimization of Planting Process Parameters for 2ZYX-2 Type Green Onion Ditching and Transplanting Machine. Phyton-Int. J. Exp. Bot. 2020, 89, 147. [Google Scholar] [CrossRef]
- Xu, G. Key Components Research and Design of Double-Row Crossing Salvia Miltiorrhiza Transplanter on Mulch-Film of Big Ridge; Northeast Agricultural University: Haerbing, China, 2020. [Google Scholar]
- Wang, Y. Design and Study on Transplanting Mechanism of Staggered Chain Type Transplanting Machine; Shihezi University: Shihezi, China, 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factors | Transplanting Depth z1/(mm) | Crank Rotation Speed z2/(rpm) | |
|---|---|---|---|
| Levels | |||
| 1 | 40 | 35 | |
| 2 | 50 | 47.5 | |
| 3 | 60 | 60 | |
| Factors | Transplanting Depth z1/(mm) | Crank Rotation Speed z2/(rpm) | |
|---|---|---|---|
| Code | |||
| r (Z2j) | 60 | 60 | |
| 1(Z0j + Δj) | 58.265 | 57.831 | |
| 0(Z0j) | 50 | 47.5 | |
| 1(Z0j − Δj) | 41.735 | 37.169 | |
| −r (Z1j) | 40 | 35 | |
| Δj = (Z2j − Z1j)/2r | 8.264 | 10.331 | |
| xj = (Zj − Z0j)/Δj | x1 = 0.121(z1 − 50) | x2 = 0.097(z2 − 47.5) | |
| Factors | x0 | x1 | x2 | x1x2 | x12 | x22 | y1 | y2 | y3 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Test | ||||||||||
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 90.72 | 90.23 | 90.83 | |
| 2 | 1 | 1 | −1 | −1 | 1 | 1 | 94.69 | 93.56 | 94.52 | |
| 3 | 1 | −1 | 1 | −1 | 1 | 1 | 90.15 | 91.17 | 90.23 | |
| 4 | 1 | −1 | −1 | 1 | 1 | 1 | 93.05 | 94.58 | 92.97 | |
| 5 | 1 | r | 0 | 0 | r2 | 0 | 94.61 | 92.78 | 94.57 | |
| 6 | 1 | −r | 0 | 0 | r2 | 0 | 92.34 | 95.13 | 92.19 | |
| 7 | 1 | 0 | r | 0 | 0 | r2 | 90.28 | 90.73 | 90.51 | |
| 8 | 1 | 0 | −r | 0 | 0 | r2 | 93.15 | 95.67 | 93.05 | |
| 9 | 1 | 0 | 0 | 0 | 0 | 0 | 94.53 | 94.46 | 94.47 | |
| 10 | 1 | 0 | 0 | 0 | 0 | 0 | 94.25 | 93.85 | 94.38 | |
| 11 | 1 | 0 | 0 | 0 | 0 | 0 | 93.28 | 94.29 | 94.52 | |
| 12 | 1 | 0 | 0 | 0 | 0 | 0 | 94.46 | 95.03 | 94.61 | |
| Source | Squared Sum | Freedom Level | Mean Square | F Value | p-Value |
|---|---|---|---|---|---|
| Model | 29.99 | 3 | 6.19 | 21.19 | 0.0010 ** |
| x1 | 3.55 | 1 | 3.55 | 10.4 | 0.0121 * |
| x2 | 15.44 | 1 | 15.44 | 45.30 | 0.0001 ** |
| x22 | 11.01 | 1 | 11.01 | 32.29 | 0.0005 ** |
| Residuals | 2.73 | 8 | 0.3409 | / | / |
| Lack of Fitness | 1.72 | 5 | 0.3442 | 1.03 | 0.5256 |
| Pure Error | 1.01 | 3 | 0.3353 | / | / |
| Cor Total | 32.72 | 11 | / | / | / |
| Source | Squared Sum | Freedom Level | Mean Square | F Value | p-Value |
|---|---|---|---|---|---|
| Model | 32.60 | 3 | 10.87 | 20.50 | 0.0004 ** |
| x1 | 3.33 | 1 | 3.33 | 6.28 | 0.0366 * |
| x2 | 23.34 | 1 | 23.34 | 44.04 | 0.0002 ** |
| x22 | 5.92 | 1 | 5.92 | 11.17 | 0.0102 ** |
| Residuals | 4.24 | 8 | 0.5300 | / | / |
| The Lack of Fitness | 3.53 | 5 | 0.7051 | 2.96 | 0.2005 |
| Pure Error | 0.7149 | 3 | 0.2383 | / | / |
| Cor Total | 36.84 | 11 | / | / | / |
| Source | Squared Sum | Freedom Level | Mean Square | F Value | p-Value |
|---|---|---|---|---|---|
| Model | 31.72 | 4 | 7.93 | 46.07 | <0.0001 ** |
| x1 | 3.65 | 1 | 3.65 | 21.22 | 0.0025 ** |
| x2 | 13.04 | 1 | 13.04 | 75.74 | <0.0001 ** |
| x12 | 1.87 | 1 | 1.87 | 10.84 | 0.0133 * |
| x22 | 13.17 | 1 | 13.17 | 76.50 | <0.0001 ** |
| Residuals | 1.20 | 7 | 0.1721 | / | / |
| The Lack of Fitness | 1.18 | 4 | 0.2943 | 31.87 | 0.0086 |
| Pure Error | 0.0277 | 3 | 0.0092 | / | / |
| Cor Total | 32.92 | 11 | / | / | / |
| Inspection Items | y1 | y2 | y3 |
|---|---|---|---|
| R | 0.9728 | 0.9672 | 0.9850 |
| R2 | 0.9464 | 0.9356 | 0.9703 |
| Adj R2 | 0.9496 | 0.9391 | 0.9724 |
| S | 0.5406 | 0.6290 | 0.4040 |
| Durbin–Watson Statistic | 2.6552 (1 < d < 3) | 1.8228 (1 < d < 3) | 2.9930 (1 < d < 3) |
| QRNDSM y1/% | QRSRD y2/% | QRSLS y3/% | |
|---|---|---|---|
| Theoretical value | 94.91 | 95.42 | 94.93 |
| Field test validation value | 94.83 | 95.47 | 94.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Li, L.; Chen, D.; Zha, X.; Yang, R. Design and Optimization of a Boat-Bottom-Shaped Transplanting Device for Sweet Potato (Ipomoea batatas) with Low Seedling Damage Rate. Appl. Sci. 2022, 12, 2817. https://doi.org/10.3390/app12062817
Pan Z, Li L, Chen D, Zha X, Yang R. Design and Optimization of a Boat-Bottom-Shaped Transplanting Device for Sweet Potato (Ipomoea batatas) with Low Seedling Damage Rate. Applied Sciences. 2022; 12(6):2817. https://doi.org/10.3390/app12062817
Chicago/Turabian StylePan, Zhiguo, Lin Li, Dongquan Chen, Xiantao Zha, and Ranbing Yang. 2022. "Design and Optimization of a Boat-Bottom-Shaped Transplanting Device for Sweet Potato (Ipomoea batatas) with Low Seedling Damage Rate" Applied Sciences 12, no. 6: 2817. https://doi.org/10.3390/app12062817
APA StylePan, Z., Li, L., Chen, D., Zha, X., & Yang, R. (2022). Design and Optimization of a Boat-Bottom-Shaped Transplanting Device for Sweet Potato (Ipomoea batatas) with Low Seedling Damage Rate. Applied Sciences, 12(6), 2817. https://doi.org/10.3390/app12062817