
Direct Position Determination of Non-Circular Sources for Multiple Arrays via Weighted Euler ESPRIT Data Fusion Method




Abstract
:1. Introduction
- (1)
- The proposed NC-Euler-WESPRIT DPD algorithm takes full advantage of elliptic covariance information of NC signals to expand the virtual array aperture. Compared with original two-step localization technique and SDF algorithm, NC-Euler-WESPRIT DPD increases the available degrees of freedom (DOF).
- (2)
- Euler transformation is applied to decrease the complexity by converting complex number calculation into real number operation and ESPRIT is applied to avoid the high-dimensional spectral function search problem of each observation station. Then we combine the information of all observation stations to construct a spectral function without complex multiplication to further reduce the computational complexity.
- (3)
- In practice, there will be loss when the signal propagates in the air and SNRs of received signals at each observation station are often different. Therefore, a specific weight is set to compensate for the projection error and get better positioning performance.
- (4)
- Complexity analysis, Cramer Rao lower bound (CRLB) and simulation consequence are given to check the effectiveness and superiority of the NC-Euler-WESPRIT DPD algorithm.
2. Model Formulation
3. The Proposed Algorithm
3.1. NC-ESPRIT-DPD
3.2. NC-Euler-ESPRIT-DPD
3.3. NC-Euler-WESPRIT-DPD
| Algorithm 1 NC-Euler-WESPRIT-DPD |
| Input: all the data collected from G observation stations Output: target positions
|
4. Performance Analysis
4.1. Derivation of the CRLB
4.2. Complexity Analysis
4.3. Simulation Environment
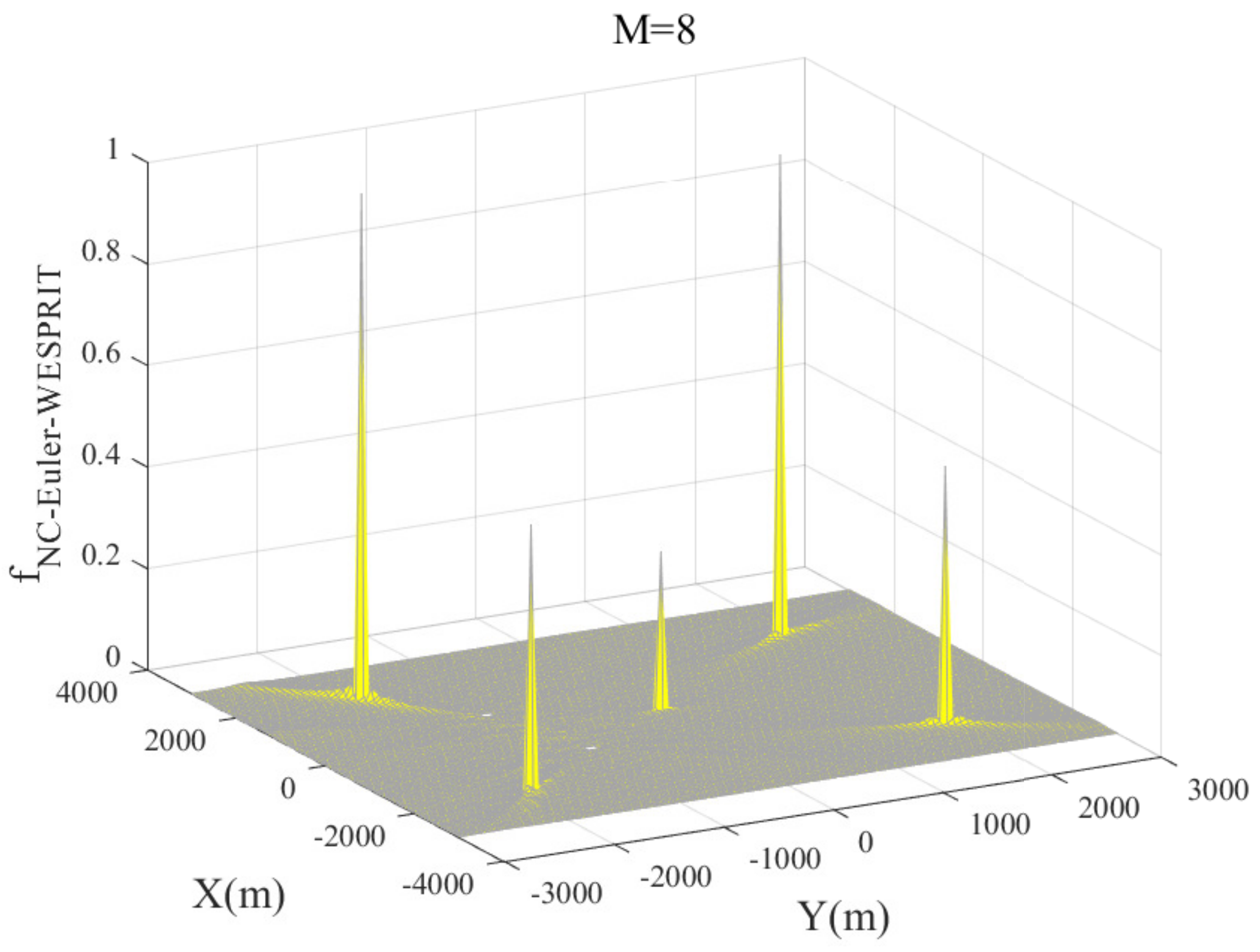
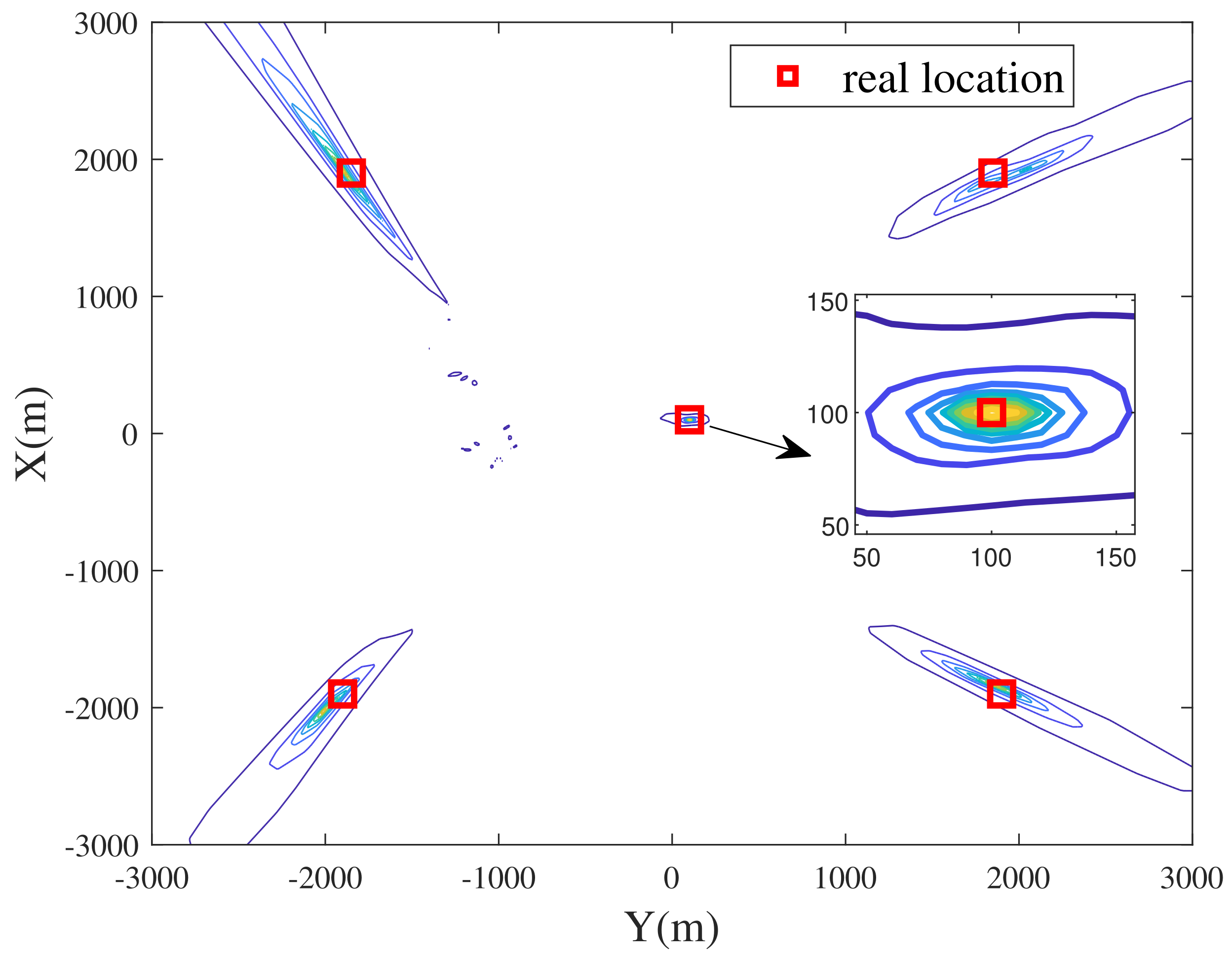
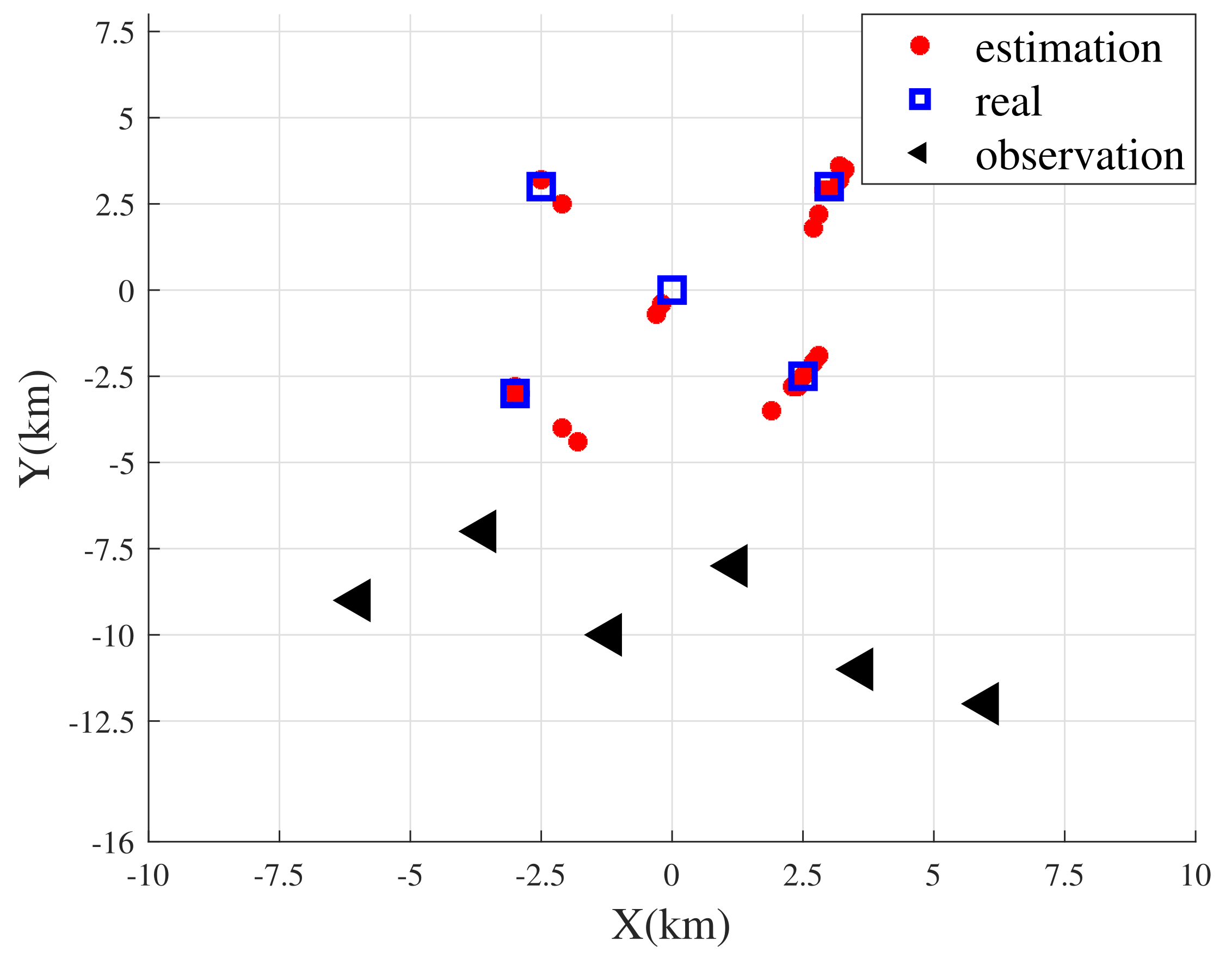
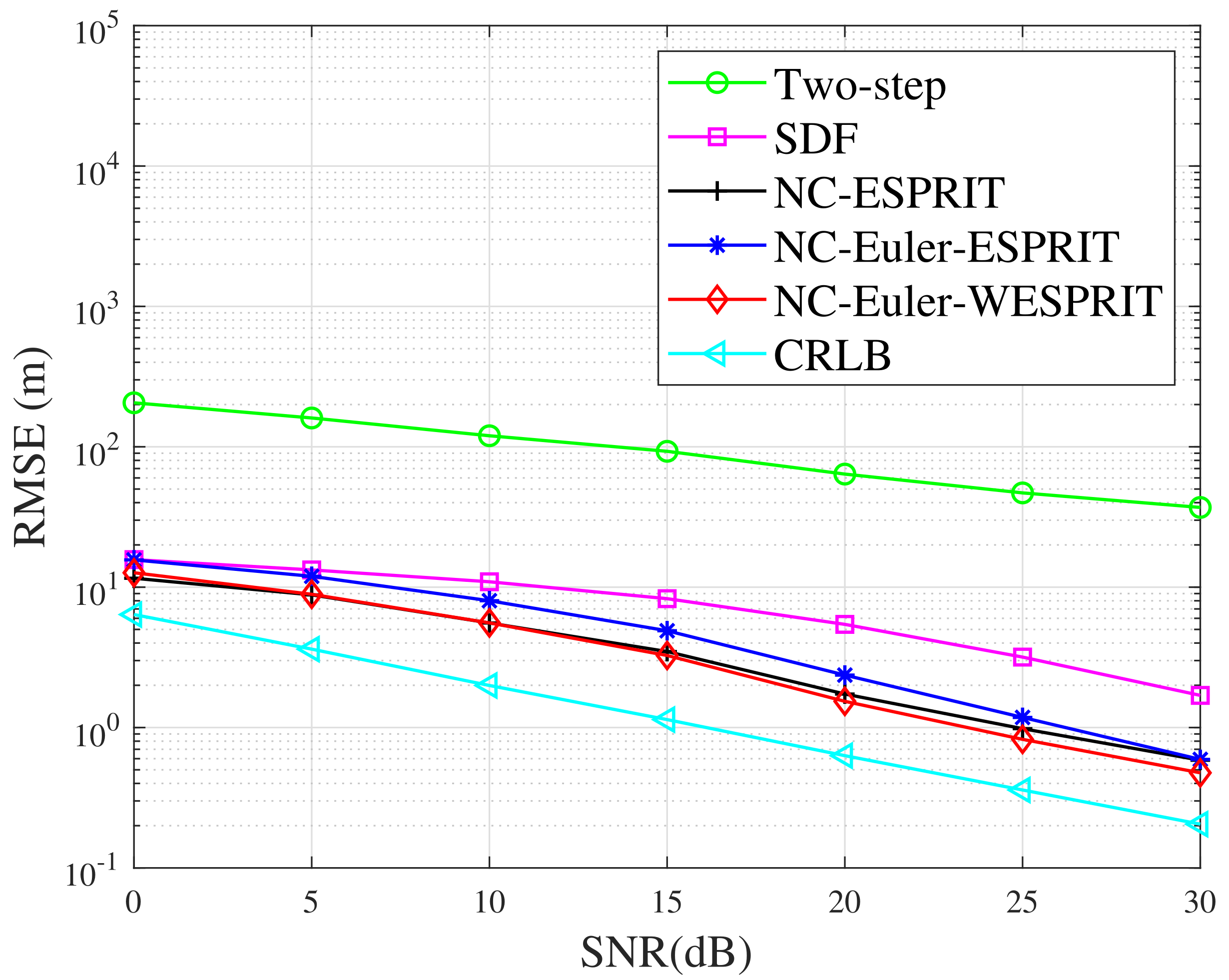
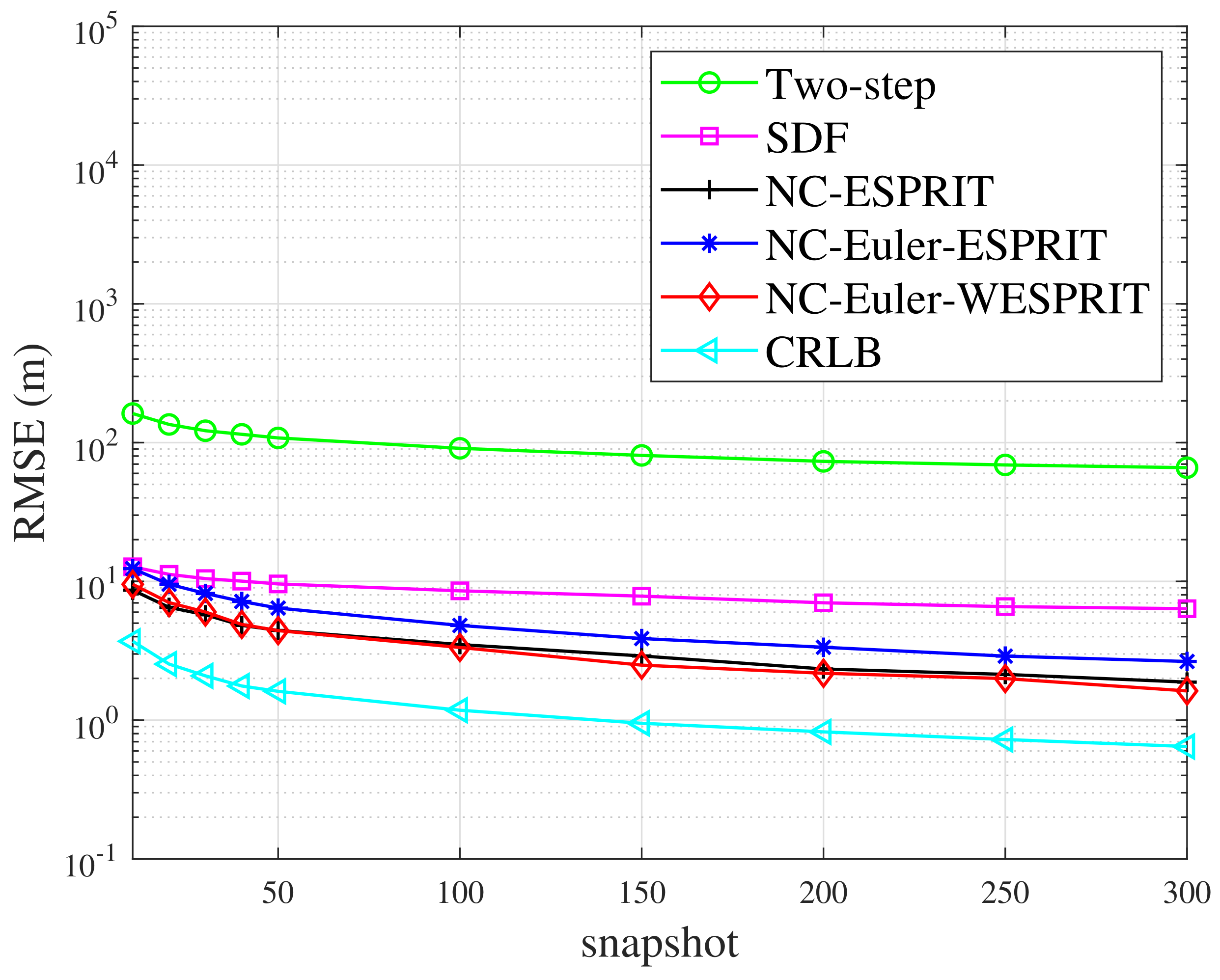
4.4. Simulation Results
4.5. Advantages of the Proposed Algorithm
- (1)
- The proposed NC-Euler-WESPRIT algorithm has more available degrees of freedom than original two-step positioning method, SDF method and can distinguish more targets.
- (2)
- The proposed NC-Euler-WESPRIT algorithm significantly reduces the computational complexity compared with SDF method and NC-ESPRIT algorithm.
- (3)
- By weighting the received data of each observation station, the proposed NC-Euler-WESPRIT algorithm has higher positioning precision than original two-step positioning method and SDF method.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DPD | Direct Position Determination |
| DOA | Direction of Arrival |
| NC | Non-circular |
| SNR | Signal-to-noise ratio |
| ESPRIT | Estimating Signal Parameters Viarotational Invariance Techniques |
| SDF | Subspace Data Fusion |
| ML | Maximum Likelihood |
| QPSK | Quadrature Phase Shift Keying |
| AM | Amplitude Modulation |
| CRLB | Cramer Rao lower bound |
| ULA | Uniform Linear Array |
| EVD | Eigenvalue Decomposition |
| RMSE | Root Mean Square Error |
| DOF | Degree of Freedom |
References
- Hameed, K.; Tu, S.; Ahmed, N.; Khan, W.; Armghan, A.; Alenezi, F.; Alnaim, N.; Qamar, M.S.; Basit, A.; Ali, F. DOA Estimation in Low SNR Environment through Coprime Antenna Arrays: An Innovative Approach by Applying Flower Pollination Algorithm. Appl. Sci. 2021, 11, 7985. [Google Scholar] [CrossRef]
- Ma, F.; Liu, Z.M.; Guo, F. Direct Position Determination in Asynchronous Sensor Networks. IEEE Trans. Veh. Technol. 2019, 68, 8790–8803. [Google Scholar] [CrossRef]
- Mazuelas, S.; Lorenzo, R.M.; Bahillo, A.; Fernandez, P.; Prieto, J.; Abril, E.J. Topology Assessment Provided by Weighted Barycentric Parameters in Harsh Environment Wireless Location Systems. IEEE Trans. Signal Process. 2010, 58, 3842–3857. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Y.; Liu, X. A Direct Position Determination Approach for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 13033–13044. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.X.; Huang, J.; Sun, J.; Zhang, W. Novel 3-D nonstationary mmWave massive MIMO channel models for 5G high-speed train wireless communications. IEEE Trans. Veh. Technol. 2018, 68, 2077–2086. [Google Scholar] [CrossRef]
- Qun, Y.; Yi, Y.; Xiang-yu, C.; Xu, Y. Analysis of DOA and adaptive beam forming including mutual coupling. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Bell, K.L.; Pitre, R. MAP-PF 3D position tracking using multiple sensor array. In Proceedings of the 2008 5th IEEE Sensor Array and Multichannel Signal Processing Workshop, Darmstadt, Germany, 21–23 July 2008; pp. 238–242. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.; Cao, Z.; Wang, X. A New Atomic Norm for DOA Estimation with Gain-Phase Errors. IEEE Trans. Signal Process. 2020, 68, 4293–4306. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, S.; Chen, C.L.P. TOA-Based Passive Localization in Quasi-Synchronous Networks. IEEE Commun. Lett. 2014, 18, 592–595. [Google Scholar] [CrossRef]
- Qiao, T.; Zhang, Y.; Liu, H. Nonlinear Expectation Maximization Estimator for TDOA Localization. IEEE Wirel. Commun. Lett. 2014, 3, 637–640. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Zhu, P.; You, X. Grid-search-based hybrid TOA/AOA location techniques for NLOS environments. IEEE Commun. Lett. 2009, 13, 254–256. [Google Scholar] [CrossRef]
- Liu, J.; Lee, J.; Li, L.; Luo, Z.Q.; Wong, K. Online clustering algorithms for radar emitter classification. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1185–1196. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. Direct position determination in the presence of model errors—Known waveforms. Digit. Signal Process. 2006, 16, 52–83. [Google Scholar] [CrossRef]
- Weiss, A. Direct position determination of narrowband radio frequency transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Picinbono, B. On circularity. IEEE Trans. Signal Process. 1994, 42, 3473–3482. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. Direct position determination (DPD) of multiple known and unknown radio-frequency signals. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 1115–1118. [Google Scholar]
- Bar-Shalom, O.; Weiss, A.J. Direct position determination of OFDM signals. In Proceedings of the 2007 IEEE 8th Workshop on Signal Processing Advances in Wireless Communications, Helsinki, Finland, 17–20 June 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Oispuu, M.; Nickel, U. Direct detection and position determination of multiple sources with intermittent emission. Signal Process. 2010, 90, 3056–3064. [Google Scholar] [CrossRef]
- Qin, T.; Li, L.; Lu, Z.; Wang, D. A ML-Based Direct Localization Method for Multiple Sources with Moving Arrays. In Proceedings of the 2018 IEEE 18th International Conference on Communication Technology (ICCT), Chongqing, China, 8–11 October 2018; pp. 1073–1076. [Google Scholar] [CrossRef]
- Zhou, T.; Yi, W.; Kong, L. Direct position determination of multiple coherent sources using an iterative adaptive approach. Signal Process. 2019, 161, 203–213. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Q.; Huang, Z.; Yuan, N.; Hu, W. Direct Position Determination of Emitters using Single Moving Coprime Array. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 23–25 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Xin Yin, J.; Wu, Y.; Wang, D. Direct Position Determination of Multiple Noncircular Sources with a Moving Array. Circuits Syst. Signal Process. 2017, 36, 4050–4076. [Google Scholar] [CrossRef]
- Yin, J.; Wang, D.; Wu, Y.; Yao, X. ML-based single-step estimation of the locations of strictly noncircular sources. Digit. Signal Process. 2017, 69, 224–236. [Google Scholar] [CrossRef]
- Yin, J.; Wang, D.; Wu, Y. An Efficient Direct Position Determination Method for Multiple Strictly Noncircular Sources. Sensors 2018, 18, 324. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.K.; Xu, H.Y.; Ba, B.; Wang, D.M.; Geng, W. Direct Position Determination of Non-Circular Sources Based on a Doppler-Extended Aperture with a Moving Coprime Array. IEEE Access 2018, 6, 61014–61021. [Google Scholar] [CrossRef]
- Qin, T.; Lu, Z.; Ba, B.; Wang, D. A Decoupled Direct Positioning Algorithm for Strictly Noncircular Sources Based on Doppler Shifts and Angle of Arrival. IEEE Access 2018, 6, 34449–34461. [Google Scholar] [CrossRef]
- Zhang, Y.; Ba, B.; Wang, D.; Geng, W.; Xu, H. Direct Position Determination of Multiple Non-Circular Sources with a Moving Coprime Array. Sensors 2018, 18, 1479. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; He, Y.; Zhang, X.; Wu, Q. Simultaneous Localization of Multiple Unknown Emitters Based on UAV Monitoring Big Data. IEEE Trans. Ind. Inform. 2021, 17, 6303–6313. [Google Scholar] [CrossRef]
- Haardt, M.; Romer, F. Enhancements of unitary ESPRIT for non-circular sources. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004; Volume 2, pp. 101–104. [Google Scholar]
- Viswanath, P.; Tse, D.; Anantharam, V. Asymptotically optimal water-filling in vector multiple-access channels. IEEE Trans. Inf. Theory 2001, 47, 241–267. [Google Scholar] [CrossRef]
- Petrus, P.; Ertel, R.; Reed, J. Capacity enhancement using adaptive arrays in an AMPS system. IEEE Trans. Veh. Technol. 1998, 47, 717–727. [Google Scholar] [CrossRef]
- Jeng, S.S.; Xu, G.; Lin, H.P.; Vogel, W. Experimental studies of spatial signature variation at 900 MHz for smart antenna systems. IEEE Trans. Antennas Propag. 1998, 46, 953–962. [Google Scholar] [CrossRef]
- Qian, Y.; Yang, Z.; Zeng, H. Direct Position Determination for Augmented Coprime Arrays via Weighted Subspace Data Fusion Method. Math. Probl. Eng. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Kumar, G.; Ponnusamy, P.; Amiri, I.S. Direct Localization of Multiple Noncircular Sources with a Moving Nested Array. IEEE Access 2019, 7, 101106–101116. [Google Scholar] [CrossRef]
- Stoica, P.; Arye, N. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Shi, X.; Zhang, X. Weighted Direct Position Determination via the Dimension Reduction Method for Noncircular Signals. Math. Probl. Eng. 2021, 2021, 1–10. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Complexity |
|---|---|
| Two-step [12] | |
| SDF [27] | |
| NC-ESPRIT | |
| NC-Euler-ESPRIT | |
| NC-Euler-WESPRIT |
| Simulation Parameters | Value | Unit |
|---|---|---|
| (signal to noise ratio) | 0~30 | dB |
| G(number of observation stations) | 6 | - |
| Q(number of targets) | 5 | - |
| (wavelength) | 1 | m |
| d(interval of array elements) | m | |
| M(number of antennas) | 6 | - |
| K(number of snapshots) | 10~300 | - |
| (number of Monte Carlo) | 1000 | - |
| (heteroscedasticity) | 10 | - |
| (target locations) | (−3000,−3000) (0,0) (3000,3000) | m |
| (−2500,3000) (2500,−2500) | ||
| (NC phase) | [10,40,30,50,60] | rad |
| (observation locations) | (−6000,−9000) (−3600,−7000) (−1200,−10,000) | m |
| (1200,−8000) (3600,−11,000) (6000,−12,000) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Zhang, X.; Zeng, H. Direct Position Determination of Non-Circular Sources for Multiple Arrays via Weighted Euler ESPRIT Data Fusion Method. Appl. Sci. 2022, 12, 2503. https://doi.org/10.3390/app12052503
Shi X, Zhang X, Zeng H. Direct Position Determination of Non-Circular Sources for Multiple Arrays via Weighted Euler ESPRIT Data Fusion Method. Applied Sciences. 2022; 12(5):2503. https://doi.org/10.3390/app12052503
Chicago/Turabian StyleShi, Xinlei, Xiaofei Zhang, and Haowei Zeng. 2022. "Direct Position Determination of Non-Circular Sources for Multiple Arrays via Weighted Euler ESPRIT Data Fusion Method" Applied Sciences 12, no. 5: 2503. https://doi.org/10.3390/app12052503
APA StyleShi, X., Zhang, X., & Zeng, H. (2022). Direct Position Determination of Non-Circular Sources for Multiple Arrays via Weighted Euler ESPRIT Data Fusion Method. Applied Sciences, 12(5), 2503. https://doi.org/10.3390/app12052503