1. Introduction
Many problems from the applied sciences that involve a dynamic process under study, either to be solved, simulated, or even controlled, are described by models that could contain a considerable amount of variables and/or many inputs and outputs. This is particularly true in the context of fluid dynamics. For instance, equations, such as Navier–Stokes, Burgers’, or Kuramoto–Sivashinsky, are nonlinear partial differential equations (PDEs), which are complex and challenging to deal with by means of conventional/direct methods.
Thus, these equations are often discretized and linearized, resulting in linear ordinary differential equations (ODEs) described by a huge amount of states (internal variables). The large dimension results in high computational complexity, which leads to challenges in terms of simulation, analysis, and design. Consequently, there is a need to obtain a simplified model of smaller dimensions, which can still be used to provide accurate information for the simulation, analysis, and control of such systems.
Model reduction is commonly viewed as a methodology used for reducing the computational complexity of large scale complex models in numerical simulations. The goal is to construct a smaller system with the same structure and similar response characteristics as the original. For an overview of conventional model reduction methods, we refer the reader to the books [
1,
2,
3]. For a fairly general overview on system-theoretical model order reduction (MOR) approaches, we refer the reader to [
4]. In this work, we assume that the nonlinear systems to be modeled contains quadratic nonlinearities or it can be equivalently transformed to such a structure.
This class of systems is of interest since most smooth nonlinear systems can be exactly reformulated (lifted) as quadratic or quadratic-bilinear time-invariant systems (QBTIs), provided that the nonlinearities are analytical. Thus, even if the original model does not involve explicitly (only) quadratic nonlinearities, we could assume this structure (as we will see in the next sections). The main lifting approaches involve artificially introducing new variables into the state-space representation, computing derivatives, and rewriting all relations in the required format.
MOR methods specifically tailored for reducing QBTI systems have been proposed in [
5,
6,
7,
8]. Such approaches are fairly new, and most of them represent extensions of the techniques proposed for model reduction of linear time-invariant (LTI in short) systems and bilinear time-invariant (BTI) systems [
9]. The latter class of systems represent a class of mildly nonlinear dynamical systems, which inherits many properties from LTIs; more specifically speaking, BTIs have many systems and control theoretical quantities that are very closely related or can be easily extended from LTIs (infinite Gramians, system norms, stability properties, etc.). Additionally, model reduction of BTIs is a fairly established sub-field of MOR that has been constantly developed in recent decades. We mention here the research endeavors [
10,
11,
12,
13,
14] that preceded the more recent works in [
15,
16,
17,
18,
19].
With an ever-increasing availability of measured data in many engineering fields, the need for incorporating measurements in the modeling process has steadily grown over recent decades. The main challenge lies in effectively using the available data in order to construct/learn models that can accurately represent the dynamics of the underlying dynamic process. Sometimes, in order to satisfy accuracy requirements, the fitted/learned models might have large dimensions and, hence, not be suitable for fast numerical simulation.
Thus, it is of interest to learn reliable reduced-order surrogate models to be used instead. Here, we assume that such models have particular dynamic structure, i.e., the nonlinearities include bilinear or quadratic-bilinear terms. As seen in the sequel, this is by no means restrictive. In recent years, many data-driven and learning methods have been designed specifically for the case of BTIs [
20,
21] and also for QBTIs [
22,
23,
24,
25,
26]. Here, we mention another prolific method for learning models from data, the so-called dynamic mode decomposition (DMD) [
27,
28], which was recently extended to deal with BTIs in [
29,
30].
In this work, we cover a number of recent extensions of the data-driven non-intrusive method known in the MOR community as the Loewner framework (LF), originally introduced in [
31]. We show various applications and connections between two prominent extensions of LF. Another goal of this work is to illustrate some properties and similarities of two established reformulation (lifting) strategies:
Rewriting the dynamics of a generic nonlinear system (with analytic nonlinearities) into an equivalent form by enforcing quadratic-bilinear terms, and
Approximating systems with quadratic-bilinear terms with bilinear systems by neglecting higher-order terms (such as cubic) from the power series expansion.
Lifting and reformulation strategies include classical approaches, such as the ones in [
32,
33], as well as more modern methods. Some of the latter were already used in connection to MOR applications, such as in [
25,
34,
35]. In this work, by following such processes, we are able to establish connections between the generalized transfer functions (input–output mappings in the frequency domain) of the two classes of lifted systems (bilinear and quadratic-bilinear).
Additionally, we provide methods of connecting the reduced order models in bilinear format with the original matrices corresponding to the quadratic-bilinear (lifted) model. To the best of the author’s knowledge, connections, such as the ones mentioned above are indeed new and represent a fair share of this work’s novelty factor. Finally, we will show applications of the approaches under consideration for two benchmarks examples (a semi-discretized classical problem of computational fluid dynamics and a nonlinear electrical circuit).
2. Transforming the Original Dynamics to Quadratic or to Bilinear Format
This section discusses several methods for finding simplified or equivalent models for given complex nonlinear problems. Specifically, one requires approximated models written in matrix format (as state-space representation). Then, one could asses how well the approximation performs and how the equivalent model captures the inherent properties of the original, complex, and possibly large-scale nonlinear system. In this section, we present two important classes of methods, which yield reformulated systems with specific structures (bilinear and quadratic-bilinear). We will start with the former in what follows, which is based on truncating power series.
As the Taylor series expansion is used to approximate infinitely differentiable complex-valued functions around a particular expansion point, so do some of the methods presented in this section (for nonlinear systems). Since we require finite-dimensional models, a truncation is in order. This would be the first limitation as truncation automatically introduces an error. The other is that, in some cases, the approximation is usually good enough only around the expansion point but not very accurate in other regions. Finally, the dimensions of the rewritten system are much higher than those of the original nonlinear system (denoted here with n), e.g., polynomial growth in n.
The alternative is equivalently rewriting the dynamics involving analytic nonlinearities by adding variables and/or by computing derivatives. In doing so, it turns out that the reformulation is exact (no approximation is involved) and additionally, the increase in the dimensions of the rewritten system is linear in n. The downside is that this applies only to nonlinear functions with certain properties (however, in practical applications, many relevant cases are indeed covered).
Consider a nonlinear system described in state-space representation by the following system of differential equations:
where
is the state variable,
is the control input, and
is the observed output. Additionally, let
, and nonlinear vector-valued functions
that are analytic in
. For simplicity, assume that the output
depends linearly on the variable
(the more general case would be
with
also analytic in
).
Without loss of generality, we assume that:
. If this does not hold, set
where
is the zero input solution. Use the following notation
. Then, rewrite the system equations in terms of the new state:
and also
. Consequently, it follows that
Definition 1 ([
34]).
The function is considered to be elementary if and only if it is a polynomial, rational, exponential, logarithmic, trigonometric, or root function or a composition of any of these classes of functions. As mentioned in ([
36]), there are a variety of practical applications where these kinds of elementary function appear
, in chemical rate equations, metal–oxide semiconductor field-effect transistor (MOSFET) in saturation mode.
in chemical engineering, describing chemical rate equations or smoothing functions.
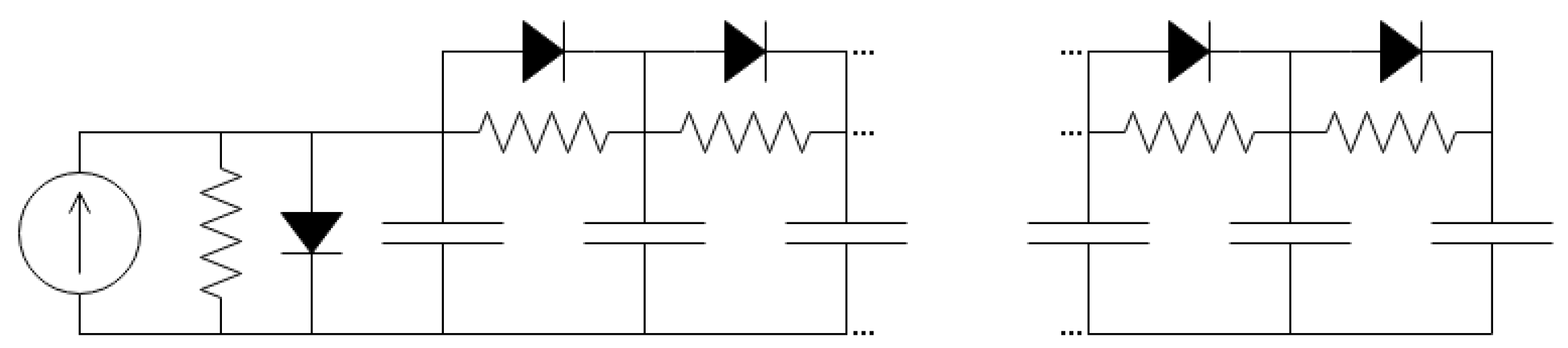
in electronical circuit components, such as diodes or bipolar junction transistors.
in control systems theory (where x is the angle used in steering of an object).
2.1. Bilinear Systems
We analyze bilinear time-invariant systems
characterized by the following equations:
where
,
,
and
,
. Here, we assume that the matrix
is invertible and can be incorporated in the other matrices appearing in the differential Equation (
2) as:
where
denotes the identity matrix of length
n. However, in practical scenarios in which the model is of large dimensions, we avoid explicitly computing the inverse of matrix
, and incorporate it as above. That is why we will interchange the two (equivalent) representations throughout the paper.
For simplicity of exposition, we will treat the single-input, single-output (SISO) case. The multi-input multi-output case is indeed technically more involved; however, it is based on the same type of reasoning.
2.1.1. Carleman’s Linearization
In what follows, we introduce a well-established numerical tool that enforces approximating a nonlinear system with analytical nonlinearities be means of a bilinear system. The technique is commonly known as Carleman’s linearization and was originally introduced in [
32]. Since this is an approximation technique, it follows that the bilinear system obtained is clearly not equivalent to the initial one (in terms of the input–output response). One main property of this method is that, as the dimension of the bilinear system increases, the original nonlinear system is better approximated. Of course, in many cases, one cannot overly increase the dimensionality, since this results in challenges, such as low computational time or depleted memory storage.
The Kronecker product of the internal state variable
with itself is defined as follows:
Denote the composition of
k Kronecker products of the same vector
with itself with
where
and
. The infinite power series (
Maclaurin series) expansions in
for both functions
and
are written as follows:
where
. Here,
denote the Jacobian matrices for
and
, respectively. Moreover,
denote the matrices containing the second-order derivatives (Hessian matrices), and so on (
denote the matrices containing the
kth-order derivatives).
Now, by using a truncated version of the Maclaurin series of the functions by keeping only the first N terms for both series, where
N represents the truncation index, we can write explicitly:
In the first equality in (
6), we can neglect the term
, without the loss of generality. This is usually chosen to be
in the case of non-existing forcing terms (and if indeed it is non-zero, it can be incorporated in the state vector by means of shifting). By substituting (
6) into the state equation in (
1), we write
Hence, it follows that the left hand side of the differential equation in (
7) contains the state variable vector
, while the right hand side contains various powers of it (
). The strategy is to modify the state variable by adding higher-order terms that were missing; in this way, the dimension of the state vector increases. First, we compute the derivative of
explicitly, as:
We introduce the following summation of
j terms, each containing
Kronecker products, as follows (for
and
)
where we set
, by definition. For example, the following formulas hold true:
In a similar manner, define
for
. It follows that the time derivative of
can indeed be written in terms of the newly defined matrices as:
Increase the dimensions of the original state vector from n to
, whereas n is the dimension of the original state variable
. In doing so, we also introduce a new state variable
defined as:
By substituting the newly introduced notation in (
9), we obtain a bilinear system with the following realization
where
and the matrices
are as below:
This procedure involves approximation techniques (based on Taylor series expansion and truncation) to yield a BTI system that approximates the original system with generic nonlinearities. The main challenge with this method is that the dimensions of the derived bilinear system could be considerably higher than those of the original system. Indeed, by increasing the truncation index N will result in a better approximation. However, the increase in dimension of the bilinear system’s dimension might yield serious memory storage problems (the storage of very large matrices). For many practical applications, one would restrict to low values of N, such as or .
Example 1. Consider a non-linear scalar system characterized by the equations:Next, we use the Taylor series around the origin for the function and hence, write the differential equation as: We identify the following values:First, we truncate at and by using that , the new state variable is given by ; the dynamics of the bilinear system corresponding to are written aswith the system matrices computed as below:Next, we increase the truncation index to , i.e., with . Hence, write the state and output equation aswith the following system matrices: 2.2. Quadratic-Bilinear Systems
We analyze QBTI systems
characterized by the following equations:
where
,
,
and
,
.
For simplicity of exposition, we treat the single-input single-output (SISO) case. The multi-input multi-output (MIMO) case is technically more involved but it is based on similar ideas and procedural steps.
A strong argument for studying this problem is that a broad class of nonlinear systems can be written in quadratic-bilinear form by using exact transformations. These transformations can be applied to many different fields, e.g., fluid mechanic systems, electrical circuit models, and biochemical rate equations.
2.2.1. Reformulating Nonlinear Systems as QBTI Systems
Next, we mention a transformation that has been known in the literature as the
McCormick relaxation [
33]. The main result of it is that, by computing derivatives or by adding algebraic equations, the initial nonlinear system can be transformed into a QBTI system. The advantage of this method is that no approximation is performed: the quadratic-bilinear system is equivalent to the initial nonlinear system. The downside is that the procedure works only for certain types of smooth analytic nonliniarities. For application purposes, it works for some cases; however, nevertheless, one has to investigate the applicability of this method to its full extent.
Next, we acknowledge that an algorithm that implements lifting procedures in an automated way was explicitly formulated in [
36]. As stated before, this is needed to equivalently transform a general nonlinear system into a QBTI system as in (
13). It is to be noted that lifting strategies were already applied in various MOR-related works, such as [
25,
35].
As originally introduced in [
36], one can distinguish two main strategies, i.e., by adding quadratic algebraic equations or by computing derivatives. The first procedure is seldom applicable by its own, and in most cases, one has to combine both of them. To show how the first approach works, we present a simple but self-explanatory example.
Example 2. Start with the nonlinear differential equation . By introducing the new variable , it follows that , and hence the two are equivalent For the second category, we present a probative example that illustrates the lifting approach appropriately.
Example 3. Consider the same nonlinear system as before, i.e.,By introducing two additional variables: and , compute the time derivatives and then substitute the given termsWe managed to equivalently rewrite the original nonlinear system as a polynomial system but with cubical nonlinearities as can be observed in (15). However, there is one more step until the transformation to QBTI format is completed. We need to choose another two surrogate variables, i.e., and , to be able to equivalently rewrite the above CTI (cubic time-invariant) system as a QBTI system. Hence, by substituting the new variables into (15), we can re-write the differential equations as:Then, the next step is to explicitly compute the derivatives of the two new variables and as:and also asBy combining (16)–(18), it follows that we can construct a QBTI system in the new variable . This lifted system is indeed equivalent to the original scalar system in (14). 4. Extensions of the Loewner Framework
The Loewner framework [
31] constructs ROMs that approximate the transfer function of the underlying model, by using data, i.e., samples of the transfer function at particular evaluation points. We refer the reader to the recent handbooks [
43,
44,
45] for a more comprehensive description.
Extensions of the Loewner framework have been proposed in recent years (some of them collected in [
39]); these were mainly based on matching values of the generalized transfer functions introduced in
Section 3, at certain evaluation points. Here, we present a simplified presentation of the main approaches and refer to the original works in [
20,
23] for a more detailed analysis, the general interpolation scheme, and many other derivations and complementary results.
As in the classical linear case [
31], the interpolation points are partitioned into two disjoint sets of left and right interpolation points. Since the transfer functions corresponding to the original bilinear or to the quadratic-bilinear system depend on multiple frequencies, the interpolation points need to be arranged in a suitable way. To simplify the presentation, we show the procedure for BTIs only, and we refer the reader to [
23] for the algorithm in the case of QBTIs.
Additionally, assume that
left and right interpolation points are available, which are grouped as follows:
Next, the left and right interpolation points are grouped in multi-tuples for
:
The generalized controllability matrix
associated with the right multi-tuples
is
where the matrices
,
, are associated with the
j-th multi-tuple
in (
42) are given by
Similarly, the generalized observability matrix
associated with the left multi-tuples
is given by
where
,
, correspond to the
i-th multi-tuple
in (
42) and
Next, the Loewner matrix
and the shifted Loewner matrix
are defined using the generalized controllability (
43) and observability (
45) matrices as
The fact that the Loewner matrices are factorized in terms of the pairs of matrices (
) and
is an inherent property of the Loewner framework, which holds true for both the bilinear and quadratic-bilinear extensions of the method.
Now, using the structure in (
44) and in (
46), it follows that:
and similarly for
. Hence, matrices
and
are indeed data matrices, since all their entries are samples of the system’s transfer functions denoted with
, and
(evaluated at particular grid of points). Next, introduce matrices:
which can also be shown to be composed solely in terms of data, i.e., evaluations of the same transfer functions, introduced in (
25). For matrix
, one can show that the
block is explicitly written as follows:
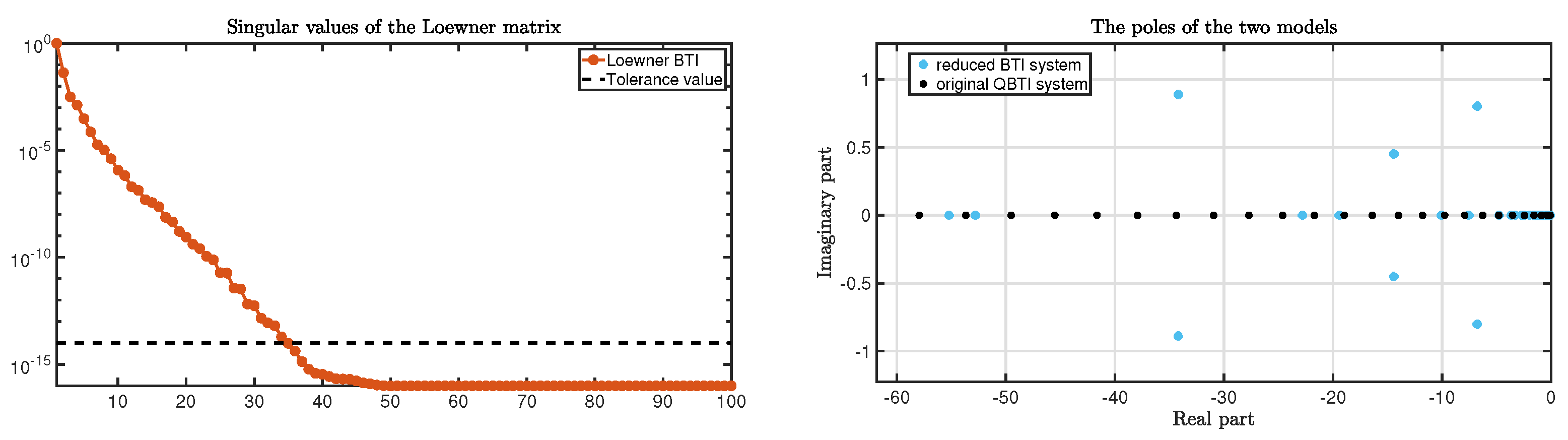
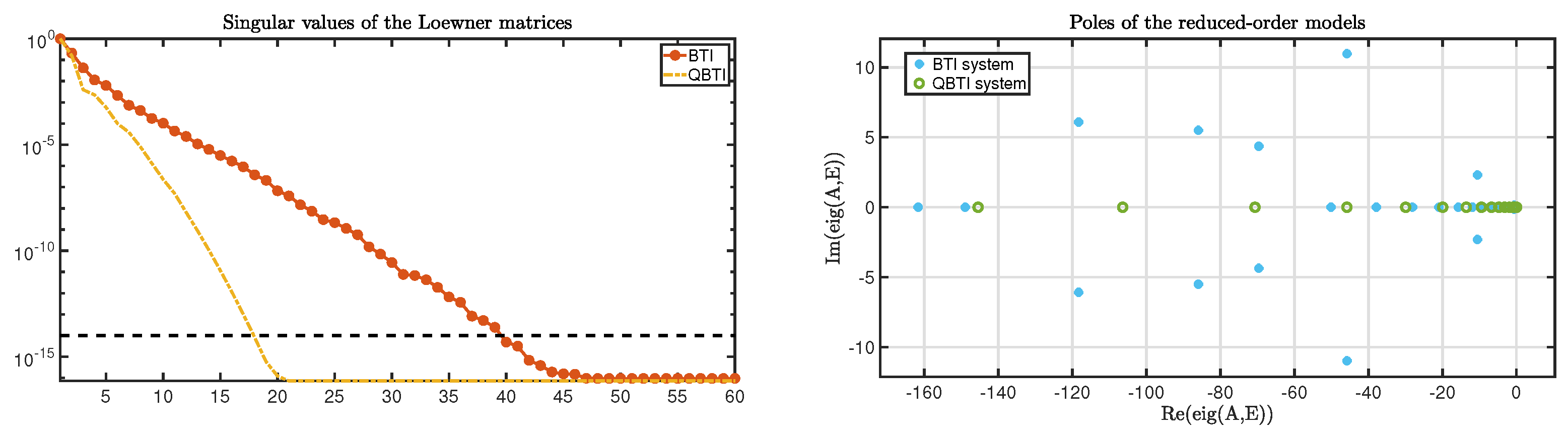
As in the linear case, we focus on the case characterized by a redundant amount of data, which typically applies in practice. In such scenarios, the power of the Loewner framework relies on compressing and extracting the relevant information from the (possibly large) amount of data. Consequently, the singular value decomposition (SVD) is used as in the sequel.
However, other factorization schemes, such as the QR factorization, or the CUR factorization [
44], can indeed be used. Next, consider the (short) SVDs of the Loewner matrices (
47). The matrices
are obtained by selecting the first
r columns of the matrices
and
. We define the following projection matrices (see also [
46]):
The Loewner ROM is given by the following matrices:
As in the linear case treated in [
31], the projection matrices
, and the ROM have complex entries; however, one can enforce real-valued matrices of the ROM if the sets of left and of right interpolation points also contain the conjugate complex data as shown in [
43] (one also needs to apply some specific transformations).
As shown in (
53), the Loewner ROM (
53) can be computed using a Petrov–Galerkin projection (see also [
1] for more details on this classical and widespread approach). However, this requires explicit access to the matrices of the original system. As in the linear case, it is possible to generate the same Loewner ROM directly from measurements of the generalized transfer functions. We refer the reader to [
23,
46] for details on the extensions and recent applications of the Loewner framework to QBTI systems.
Petrov–Galerkin Projections Applied to the Bilinear Model Computed via Carleman’s Linearization
In what follows, we will connect the structure of the projection matrices introduced in (
52) to the particular compressed quantities of the original QBTI system. For this, consider that the projection matrices are of required dimension, i.e.,
with
, corresponding to the dimension of the bilinear model computed via Carleman’s linearization (for
). Additionally, the projection matrices are split as:
with
and
. These two matrices are used to construct the realization of a bilinear system of reduced dimension computed by means of Petrov–Galerkin projections applied to the bilinear model in (
31):
where the matrices are computed as follows:
while the other matrices are given by:
It is to be noted that matrices
and
in (
54) can indeed be chosen so that the relation
holds. This implies that
and hence, it follows that
. The formulas in (
56) and (
57) show that the system matrices of the reduced-order bilinear model
in (
55) can be written as sums of appropriately compressed quantities, as enumerated below:
Using the projection matrices and by projecting the quantities of the bilinear sub-block of the original QBTI system: , and .
Using the projection matrices and : , and .
Using the projection matrices and or and (mixed terms): and .
Hence, we demonstrated that the problem of projection-based model reduction of BTI models of bi-linearized QBTI systems (using Carleman’s approach), boils down to block-wise reduction of the original QBTI models.
6. Conclusions and Outlook
In this work, we addressed the problem of approximating generic nonlinear system by means of enforcing a specific structure of the reduced-order models. Bilinear and quadratic-bilinear systems accomplish precisely this goal, either by approximation or by exact reformulation. Additionally, we dealt with complexity reduction of large-scale lifted models of nonlinear systems.
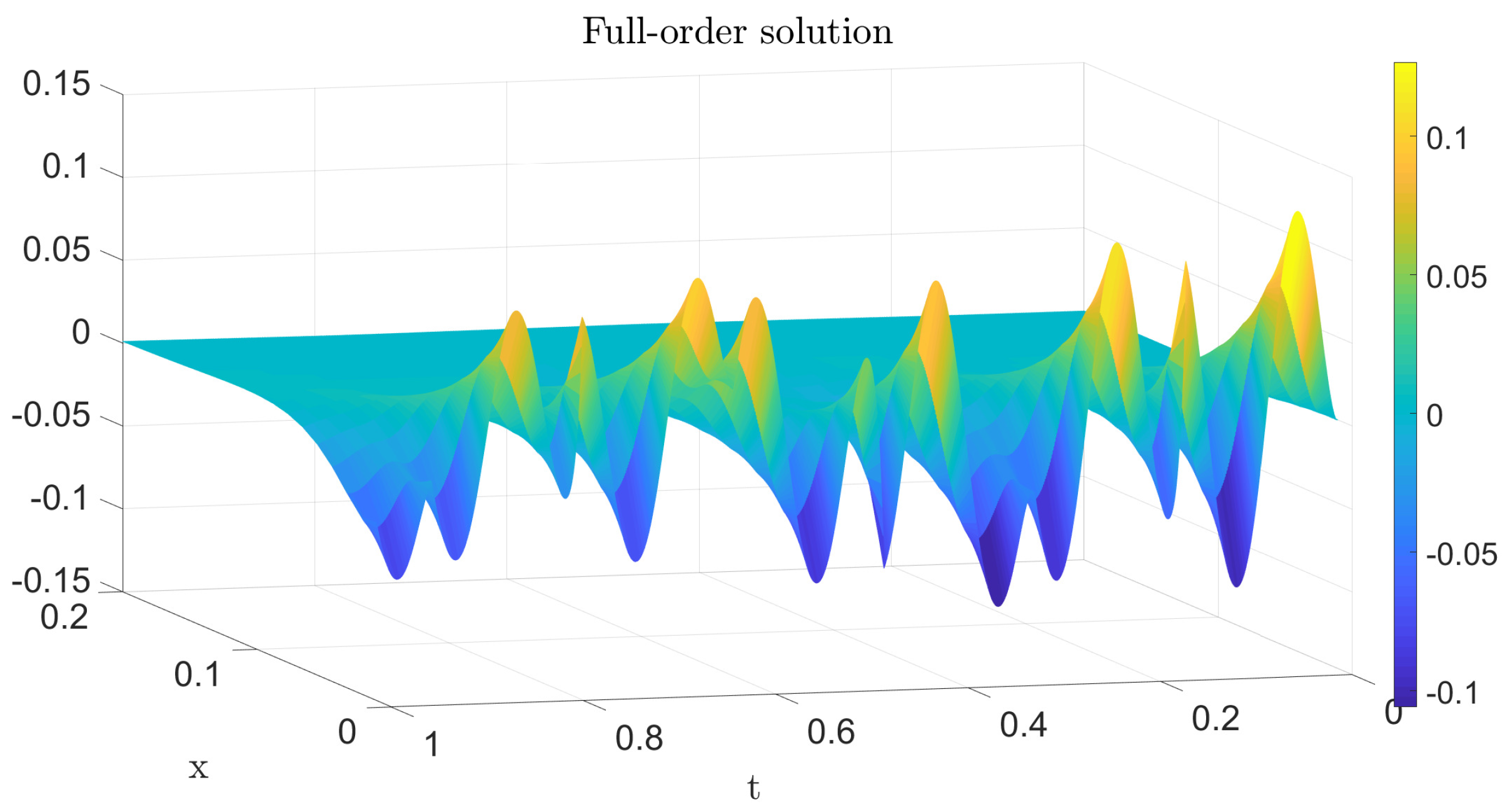
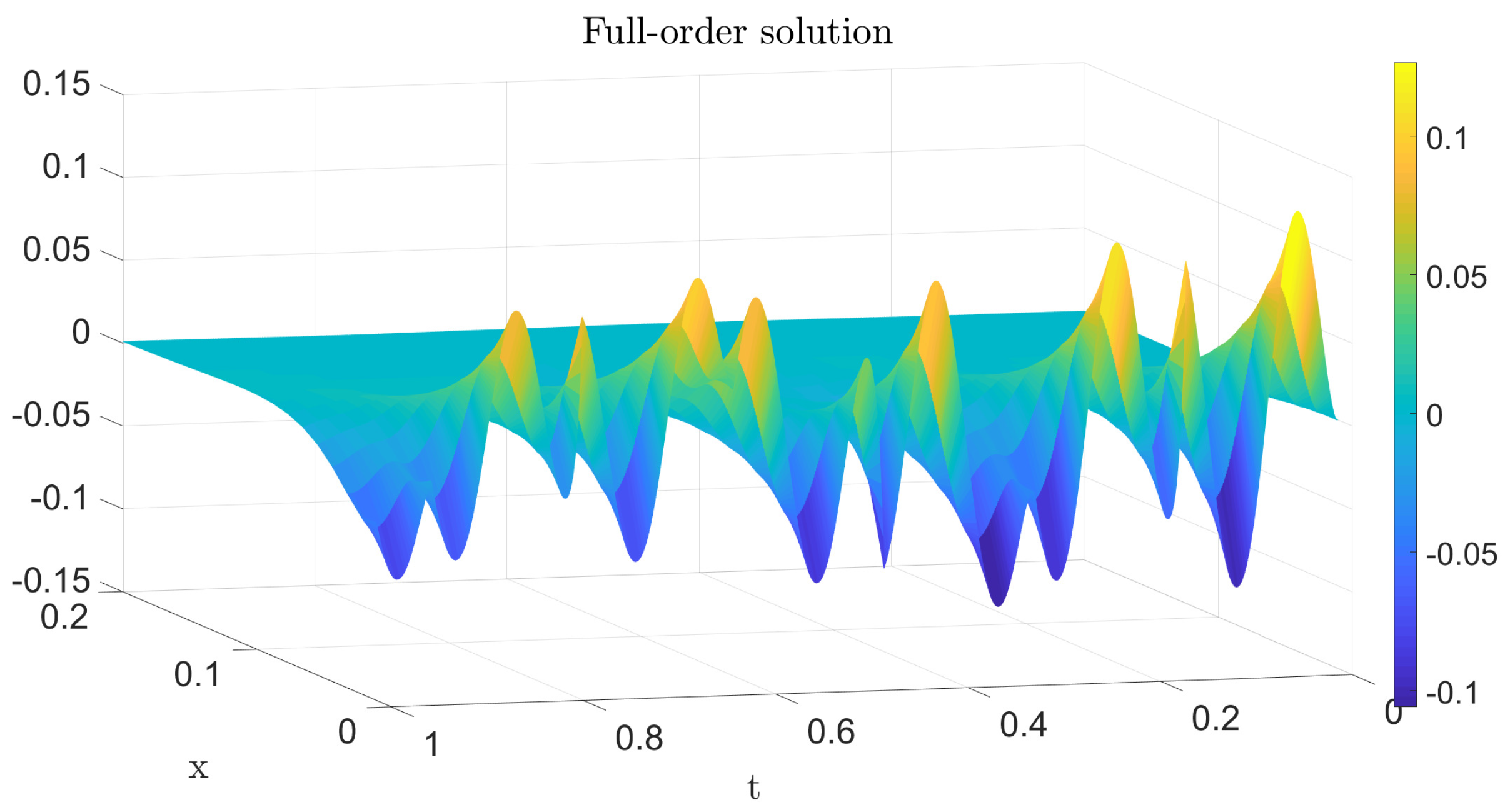
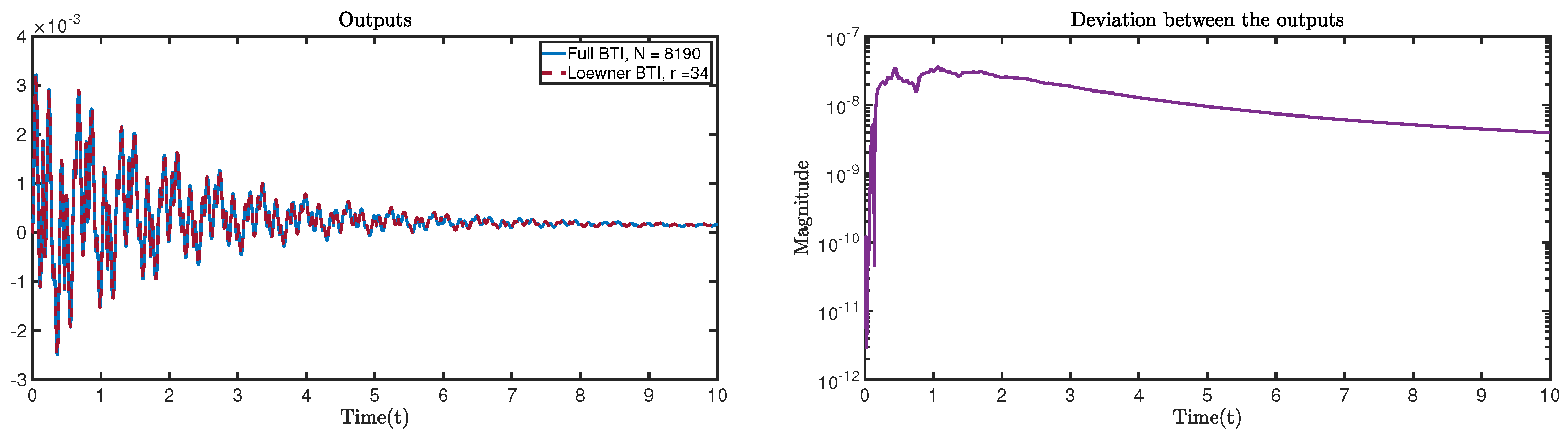
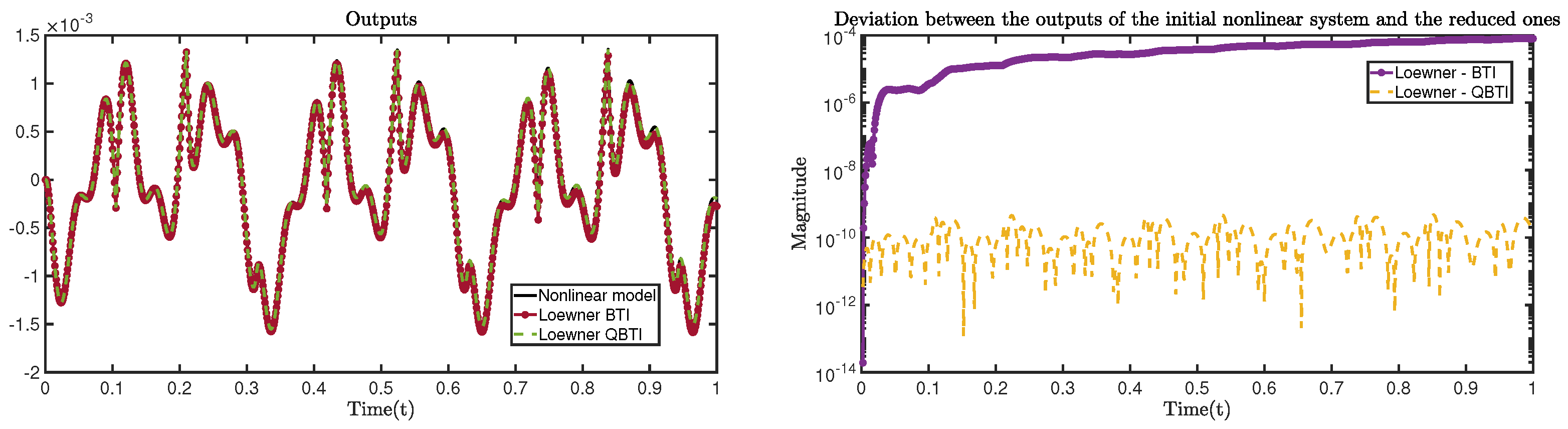
The method used—the Loewner framework—is a data-driven approach that requires samples of generalized transfer functions, which are appropriately defined for both bilinear and quadratic-bilinear systems. We showed explicit relations between these mappings, as well as between the matrices and the poles of the reduced-order models. The theoretical considerations were illustrated by two numerical examples. These included a classical application for computational fluid dynamics (the first), and a nonlinear circuit from the field of electronic engineering. Both numerical test-cases demonstrated connections between the two types of reformulations as indicated by the theory and technical results.
Finally, it was shown that formulating general nonlinear systems as QBTI systems is indeed the approach to be preferred (for applying MOR methods, such as the LF). However, using the reformulation as BTI systems also has its advantages: the simpler structure allows many connections to classical LTI systems theory.
Future research endeavors may potentially include studying the connections between the original QBTI and the BTI lifted model (by Carleman’s approach) in the time domain (by explicitly comparing the Markov parameters of both models), analyzing lifting techniques for recasting nonlinear systems with polynomial nonlinearities as QBTIs, and imposing stability preservation for the reduced-order models.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}