
On the Optimal Design of Steel Shells with Technological Constraints



 ,
,
Abstract
:1. Introduction
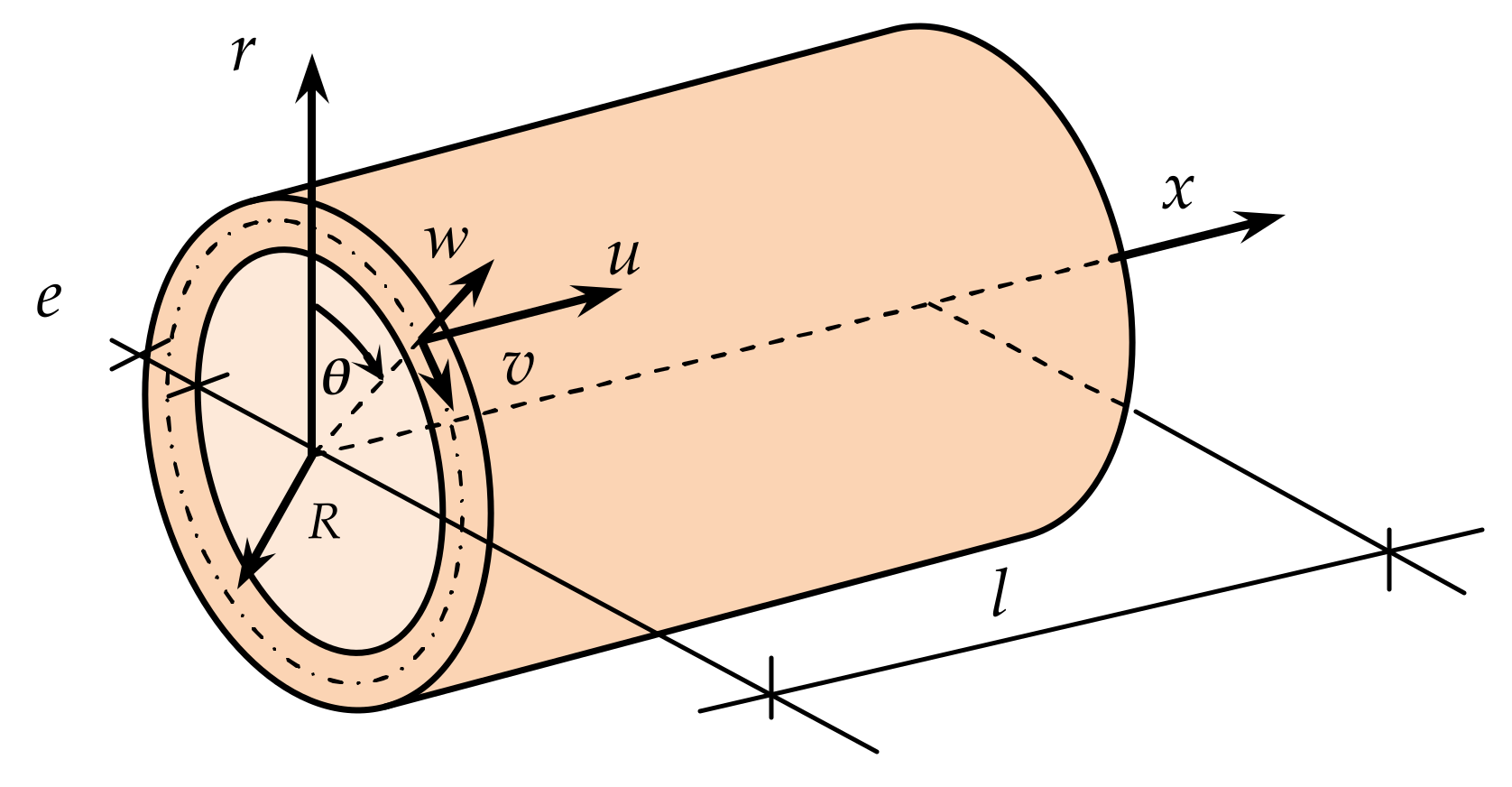
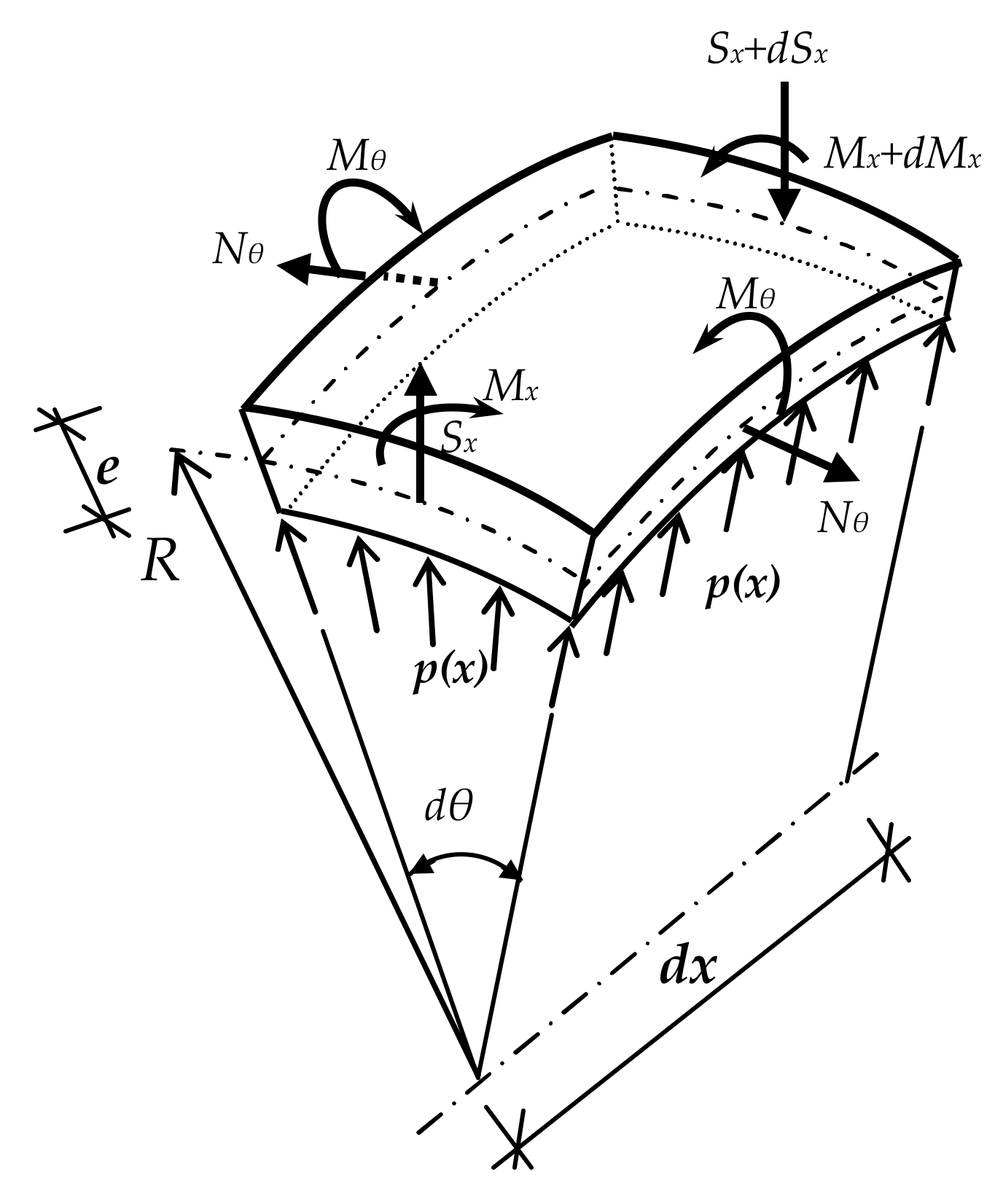
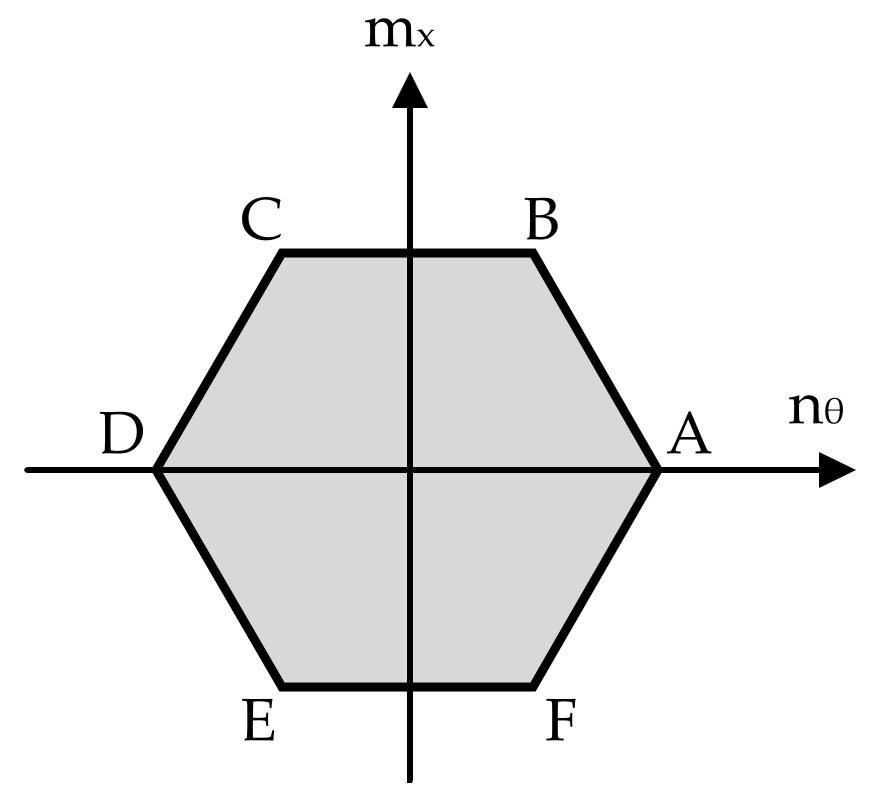
2. Basic Equations for the Limit Analysis of Shells
3. Conditions of Minimum Cost Plastic Design of Full Steel Cylindrical Shells
3.1. Hypothesis
3.2. Sufficient Optimality Conditions for the Full Shell Case
3.3. Necessary Optimality Conditions for the Full Shell Case
- If , a variation must be positive or equal to zero, and the inequality (24) is satisfied by (16)
- If , a variation must be negative or equal to zero, and the Inequality (24) is satisfied by (17)
- If , a variation must be positive or negative, and the Inequality (24) is satisfied by (18).
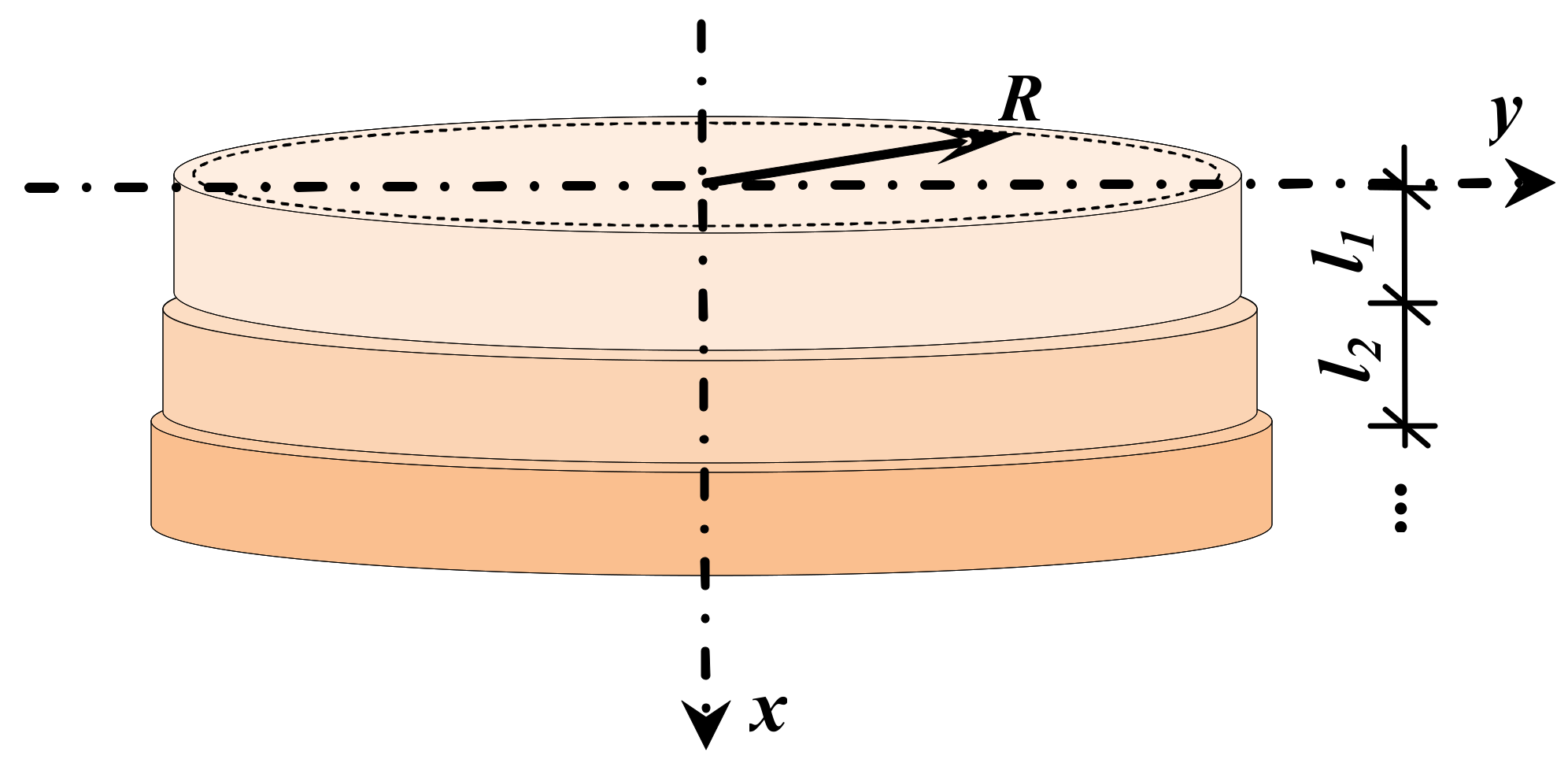
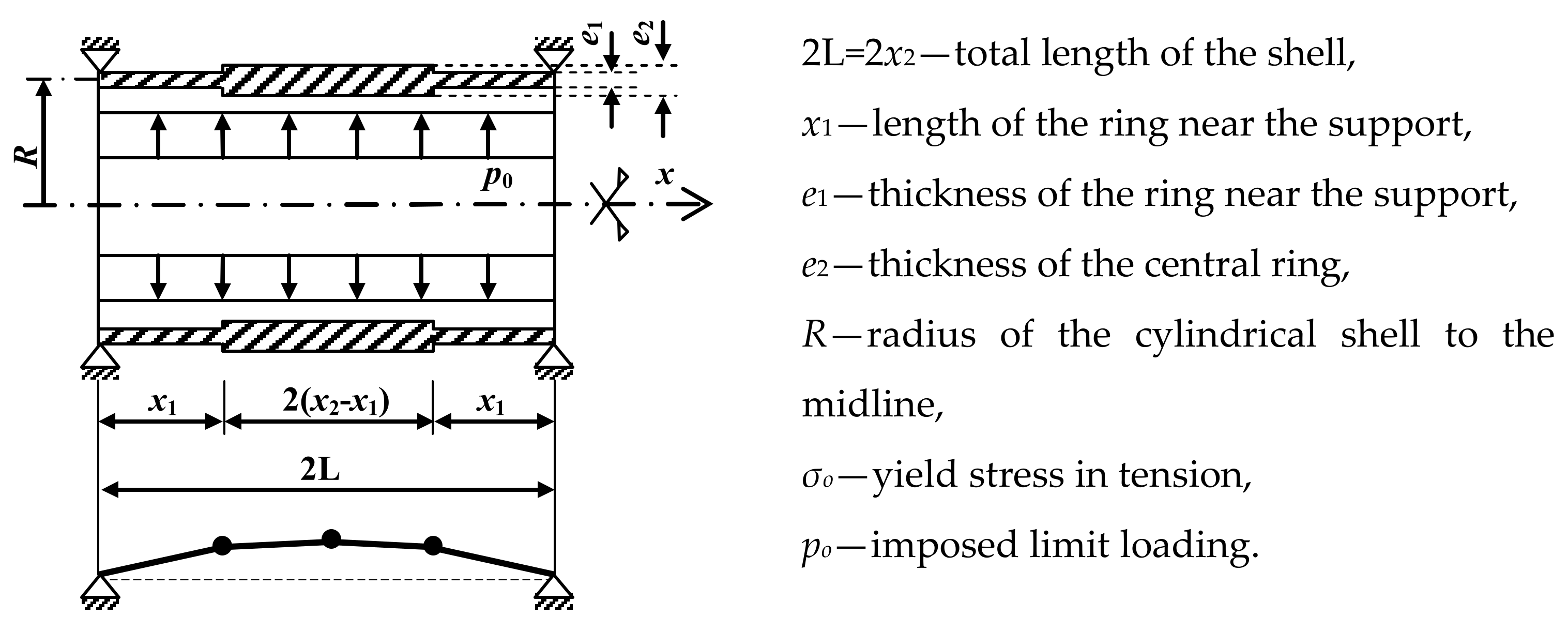
4. Optimal Plastic Design of Shell Composed of Three Rings
4.1. Statically Admissible Solution
4.2. Kinematically Admissible Solution and Optimality Conditions
Application of Optimum Conditions
5. Numerical Examples
6. Results and Discussion
7. Conclusions
- The necessary and sufficient conditions of the optimum for the full circular cylindrical shell with technological limitations, composed of rings of variable thicknesses have been derived with one behavioral constraint related to a specific constitutive low, for limit load-carrying capacity p0. The paper proves that the necessary optimality conditions are identical to the sufficient conditions of the optimum. The objective function is cost C. The specific cost ci is the function of thickness ei which leads to the shell of minimal volume, and also minimal weight. These conditions are derived for a more complex case, i.e., for a full shell with technological constraints, not a sandwich-type shell. Note that in [23], Schielld was the first to derive optimal conditions in the plastic region for a sandwich-type shell, whose thickness can vary continuously from zero to infinity.
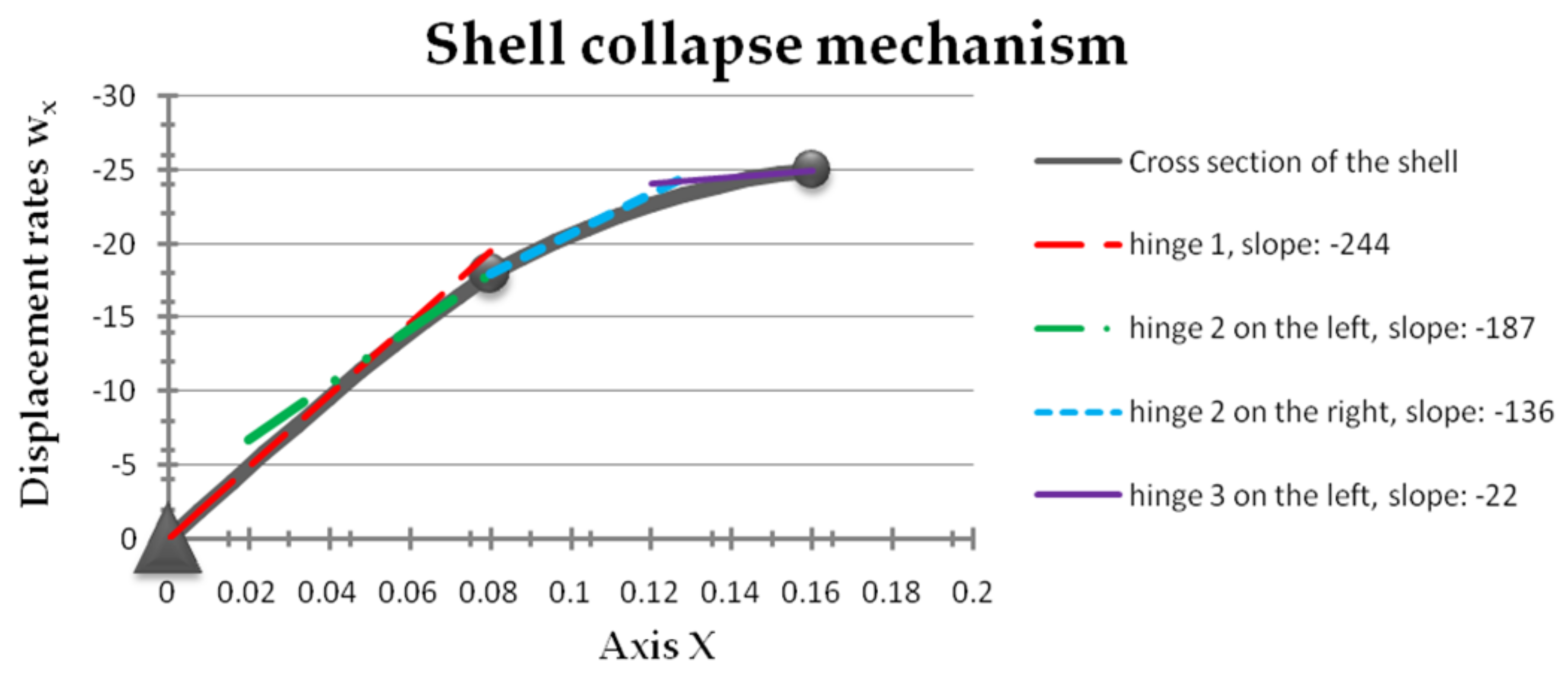
- The optimal structural design of shell (in detail with three rings) with an analytical approach complemented by numerical tools and direct connection with basic equations of limit analysis (Section 2) is given. In the static part, the problem is reduced to three linear Equations (33)–(35) and the procedure for their numerical solution is briefly explained, which leads to the optimal dimensions of the shell. Within the kinematic part, the energy dissipation of rings and were analytically obtained, and, using the optimum conditions, the displacement rates of the shell were determined. In this way, the real collapse mechanism is defined with a minimum of dissipative shell energy. This numerical procedure was applied, and the dimensions in numerical examples were obtained.
- In numerical examples, the optimal dimensions of shells were successfully calculated, applying the conditions of optimum derived in Section 3. Due to the choice of the cost function C, , the shells have minimum volume. In Example 1, the collapse mechanism is shown and confirmed (see Figure 6). For shells of the same limit load p0 and the same length L, the length of ring X1 is varied. By comparing these shells, for technological reasons, composed of three rings, with an optimal shell of constant thickness, a gain of 6.4% was achieved. This gain was for the shell of length X1 = 0.07. By further calculation, the most favorable length X1 can be obtained.
- This type of cylindrical shell constituted of rings is common in the mechanical, chemical industry, etc. With the increase in the number of rings, the gains also increase. Due to complexity, there are very few solutions to this problem given in analytical, closed-form, and only for simple cases with the results of strongly simplifying assumptions are obtained. The solutions in this paper, which are mostly analytical and complemented by exposed numerical tools, can be useful for confirming numerical procedures, as well as providing information for creating concepts and ideas for technological solutions to more practical and complex problems.
- In further work, this problem will be extended, especially, to the cases of shells with stiffeners, then with end loads for more complex problems of stability and dynamics from practice. Based on the results presented in this paper, the shells, differing in terms of the limit conditions, types of loads, and the number of rings of various thicknesses may be the object of new research and experimental verification to obtain new results.
Author Contributions
Funding
Conflicts of Interest
References
- Farshad, M. Design and Analysis of Shell Structures; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Farkas, J.; Jarmal, K. Optimum Design of Steel Structures; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Kouam, M. Contribution a L’analyse Limite eau Dimensionnement Optimal des Coques Cylindriques. Ph.D. Thesis, Faculte Polytechnique, Palaiseau, French, 1983. [Google Scholar]
- Caseiro, J.F.; Andrade-Campos, A. An Evolutionary-Inspired Optimization Algorithm Suitable for Solid Mechanics Engineering Inverse Problems. Int. J. Mechatron. Manuf. Syst. 2011, 4, 415–440. [Google Scholar] [CrossRef]
- Rocha, T.M.; Meireles, J.F.; Pinho, A.C.; Ambrósio, J.A. Update of Coarse Finite Elements Structural Models for Dynamic Analysis Identified from Reference Responses. Int. J. Mechatron. Manuf. Syst. 2011, 4, 402–414. [Google Scholar] [CrossRef]
- Save, M.; Igić, T. Examples of double-purpose optimal beams. J. Theor. Appl. Mech. 1982, 1, 311–321. [Google Scholar]
- Save, M.; Prager, W. Structural Optimization, Vol. 1. Optimality Criteria; Plenum Press: New York, NY, USA, 1985. [Google Scholar]
- Karpat, F. A Virtual Tool for Minimum Cost Design of a Wind Turbine Tower with Ring Stiffeners. Energies 2013, 6, 3822–3840. [Google Scholar] [CrossRef] [Green Version]
- Radu, D.; Sedmak, A.; Sedmak, S.; Dunjić, M. Stress Analysis of Steel Structure Comprising Cylindrical Shell with Billboard Tower. Teh. Vjesn. 2018, 25, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Cui, J.; Zheng, Y.; Ohsaki, M.; Luo, Y. Shape Optimization of Piecewise Free-form grid Surface using Plate Components. Eng. Struct. 2021, 245, 112865. [Google Scholar] [CrossRef]
- Krejsa, M.; Seitl, S.; Brozovsky, J.; Lehner, P. Fatigue damage prediction of short edge under various load: Direct Optimized Probabilistic Calculation. In Proceedings of the 2nd International Conference on Structural Integrity, ICSI 2017, Funchal, Portugal, 4–7 September 2017. [Google Scholar]
- Wang, D.; Qin, X.; Chen, W.; Wang, S. Simulation of the Deformation and Failure Characteristics of a Cylinder Shell under Internal Explosion. Appl. Sci. 2022, 12, 1217. [Google Scholar] [CrossRef]
- Hamouche, W. Contrôle de Forme de Coques Multi stables: Modélisation, Optimisation et Miseen Œuvre. Ph.D. Thesis, Université Pierre et Marie Curie Paris VI, Paris, France, 2016. [Google Scholar]
- Fraldi, M.; Guarracino, F. An Improved Formulation for the Assessment of the Capacity Load of Circular Rings and Cylindrical Shells under External Pressure. Part1. Analytical derivation. Thin-Walled Struct. 2011, 49, 1054–1061. [Google Scholar] [CrossRef]
- Ambati, M.; Kiendl, J.; DeLorensis, L. Isogeometric Kirchhoff-Love Shell Formulation for Elasto-Plasticity. Comput. Methods Appl. Mech. Eng. 2018, 340, 320–339. [Google Scholar] [CrossRef]
- Tokarev, A.S.; Karetnikov, D.V.; Fayrushin, A.M. Determining Optimal Geometric Dimensions of Alternative Design Elements of Rolled and Welded Tube-to-Tube Sheet Joints. In Proceedings of the International Conference on Industrial Engineering (ICIE2020), Sochi, Russia, 18–21 May 2020; pp. 227–233. [Google Scholar]
- Filatov, V.H. Optimal Design of Single-Layered Reinforced Cylindrical Shells. J. Mech. Eng. 2021, 24, 58–64. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, J.; Ohsaki, M.; Wan, H.; Yang, C.; Luo, Y. Optimization of the rod forces in the reticular support structure of JUNO central detector. Structures 2021, 33, 1645–1658. [Google Scholar] [CrossRef]
- Bideq, M.; Boussitine, L.; Guerlement, G. Contribution à l’optimisation des coques sphériques par l’analyse limite et les algorithmes génétiques. In Proceedings of the 23ènie Congrès de Méchanique, Lille, France, 28 September 2017; Available online: https://hal.archives-ouvertes.fr/hal-03465803/document (accessed on 1 January 2022).
- Drucker, D.C. Limit Analysis of the Cylindrical Shells under Axially-symmetric Loading. In Proceedings of the 1st Midwestern Conference Solid Mechanics, Urbana, IL, USA, 24–25 April 1953. [Google Scholar]
- Hodge, P. Plastic Analysis of Structures; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Igić, T.S. Contribution to the Optimum Design of Structures. Ph.D. Thesis, Civil Engineering Faculty, University of Nis, Nis, Serbia, 1980. [Google Scholar]
- Shield, R.T. On the optimum design of shells. J. Appl. Mech. 1960, 27, 316–322. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ξ | E2 | E1 | ξ∙E2∙E2 | E1∙E1 | VOLUME |
|---|---|---|---|---|---|
| 0.7429 | 0.03073 | 0.02635 | 0.000701410 | 0.000694219 | 0.004566007 |
| 0.7428 | 0.03072 | 0.02636 | 0.000701118 | 0.000695064 | 0.004566942 |
| 0.7427 | 0.03071 | 0.02638 | 0.000700826 | 0.000695907 | 0.004567874 |
| 0.7426 | 0.03071 | 0.02640 | 0.000700534 | 0.000696753 | 0.004568809 |
| 0.7425 | 0.03071 | 0.02641 | 0.000700242 | 0.000697590 | 0.004569744 |
| 0.7424 | 0.03071 | 0.02643 | 0.000699947 | 0.000698453 | 0.004570687 |
| 0.7423 | 0.03070 | 0.02644 | 0.000699653 | 0.000699302 | 0.004571624 |
| 0.7422 | 0.03070 | 0.02646 | 0.000699363 | 0.000700150 | 0.004572559 |
| 0.7421 | 0.03069 | 0.02648 | 0.000699072 | 0.000700999 | 0.004573497 |
| X1 | X2 | ||
| 0.00000000 | 0.00000000 | 0.08000000 | −17.97580596 |
| 0.00800000 | −1.94955594 | 0.08800000 | −19.08173715 |
| 0.01600000 | −3.88968472 | 0.09600000 | −20.108173715 |
| 0.02400000 | −5.81100477 | 0.10400000 | −21.05072739 |
| 0.03200000 | −7.70422548 | 0.11200000 | −21.90557981 |
| 0.04000000 | −9.56019208 | 0.12000000 | −22.66913126 |
| 0.04800000 | −11.36992999 | 0.12800000 | −23.33819928 |
| 0.05600000 | −13.12468814 | 0.13600000 | −23.90999527 |
| 0.06400000 | −14.81598132 | 0.14400000 | −24.38213601 |
| 0.07200000 | −16.43563122 | 0.15200000 | −24.75265364 |
| 0.08000000 | −17.97580596 | 0.16000000 | −25.02000388 |
| X1 | P1 | X2 | P2 |
| 0.000 | −244 | 0.08 | −136 |
| 0.08 | −187 | 0.16 | −22 |
| Ps = 0.0345 | ||||
|---|---|---|---|---|
| X1 | 0 | 0.09 | 0 | 0.085 |
| X2 | 0.18 | 0.18 | 0.17 | 0.17 |
| E1 | - | 0.02861 | - | 0.02755 |
| E2 | 0.0321 | 0.033 | 0.031 | 0.0321 |
| Ps = 0.035 | ||||
| X1 | 0 | 0.07 | 0.095 | 0.11 |
| X2 | 0.19 | 0.19 | 0.19 | 0.19 |
| E1 | - | 0.02638 | 0.02961 | 0.03096 |
| E2 | 0.0332 | 0.034 | 0.0345 | 0.0344 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turnić, D.; Igić, T.; Živković, S.; Igić, A.; Spasojević Šurdilović, M. On the Optimal Design of Steel Shells with Technological Constraints. Appl. Sci. 2022, 12, 2282. https://doi.org/10.3390/app12052282
Turnić D, Igić T, Živković S, Igić A, Spasojević Šurdilović M. On the Optimal Design of Steel Shells with Technological Constraints. Applied Sciences. 2022; 12(5):2282. https://doi.org/10.3390/app12052282
Chicago/Turabian StyleTurnić, Dragana, Tomislav Igić, Srđan Živković, Aleksandra Igić, and Marija Spasojević Šurdilović. 2022. "On the Optimal Design of Steel Shells with Technological Constraints" Applied Sciences 12, no. 5: 2282. https://doi.org/10.3390/app12052282
APA StyleTurnić, D., Igić, T., Živković, S., Igić, A., & Spasojević Šurdilović, M. (2022). On the Optimal Design of Steel Shells with Technological Constraints. Applied Sciences, 12(5), 2282. https://doi.org/10.3390/app12052282