1. Introduction
Fourier ptychography (FP) has emerged as a powerful tool to improve spatial resolution in microscopy [
1,
2]. Zheng et al. first proposed the Fourier ptychography microscopy (FPM) imaging technique and successfully built a microscopy setup [
1]. In FPM, using light-emitting diodes (LEDs) to illuminate the object at different angles, we can obtain a series of low-resolution (LR) intensity images in the image plane and synthesize them together [
1,
2,
3,
4]. FP iteratively transforms the LR images in the spatial and frequency domains and minimizes the difference between the measured and calculated images [
3,
4,
5,
6,
7]. Thus, the high-resolution (HR) intensity image and corresponding phase information can be recovered with the synthesized aperture.
In addition, in the Fourier plane, camera scanning is also a commonly used method that can effectively scan different portions of the space with the shifting pupil function [
3]. Therefore, Dong et al. acquired multiple intensity images of the sample by applying a scanning aperture at the Fourier plane to recover the HR complex field [
3]. FP not only eliminates the limitation of the thin sample but also accomplishes three-dimensional (3D) holographic refocusing [
3]. Later, Ou et al. constructed an aperture-scanning FPM setup using a spatial light modulator located at the back focal length of the objective lens [
4]. Combined with the principle of compressive sensing, this FPM structure can use the recovered 2D complex scattered light field to reconstruct the 3D sample complex scattered field, which is applicable in both transmissive and reflective models [
4].
All these previous studies provide examples of FP imaging in macroscopy. To extend the technique to long-range imaging, Holloway et al., on the basis of the transmissive imaging model, used a camera array system to achieve a 4–7× resolution of the actual object at a working distance of 1.5 m [
5]. Subsequently, they formally researched long-range synthetic apertures for visible imaging (SAVI) using FP [
6]. They built a macroscopic FP reflection-imaging optical setup with coherent illumination. The object was placed 1 m away from the camera, which was installed on a two-dimensional XY translation stage. Their experimental results showed resolution gains of 6× in the long-range imaging optical resolution of various diffuse reflective objects.
In the above two microscopy imaging schemes of the 4f system with aperture scanning [
3,
4], the resolution is limited by the aperture scanning range. However, in order to obtain dark-field images with high signal-to-noise ratio (SNR), the specific scanning aperture (≥0.5 NA) is required. When the scanning aperture size is less than
, the zero-frequency information may be lost during aperture scanning, which reduces and even eliminates the signal-to-noise (SNR) ratio of dark field images. Therefore, the aperture size should be greater than or equal to
[
7]. To overcome this limitation, we placed the object behind the focusing lens while using the experimental scheme of Holloway et al. for reference in far-field applications. Therefore, the spectrum information of the object is not limited by the aperture size during the camera scanning process, which can achieve super-diffraction resolution imaging.
FP overcomes the resolution and field of view trade-off exhibited by traditional imaging systems [
1,
2,
3,
4,
5,
6,
7]. Thus, the development of an optical system along with a thorough analysis of the associated theoretical fundamentals via simulations and experiments is crucially relevant for the advancement of the field of FP imaging [
6,
8]. Additionally, improving the working distance to 2 m and reporting the 4× spatial resolution improvement certainly are tangible examples of the contribution made by this study. First, the far-field imaging process of the system is derived on the basis of the Fraunhofer diffraction mechanism and the transmissive imaging model. Second, a transmissive imaging experimental setup is built to verify the reconstruction effect under different overlap ratios, and a partition reconstruction algorithm is used for HR complex field recovery to overcome the influence of system aberrations more effectively [
9,
10,
11]. In this study, by introducing an imaging lens before the sample, we can place the Fourier transform plane at the imaging lens (and hence at the pupil function of the system). Therefore, scanning the camera + imaging lens has a clearly defined effect of shifting the point spread function (PSF). This is in contrast to previous work, which affected the PSF less dramatically for each scan position.
We first analyzed the imaging process of the optical system using Fresnel diffraction theory to help us understand the macroscopic FP imaging process more effectively. Second, we showed that our prototype setup can bypass the diffraction limit of a conventional photographic lens and achieve HR in the far field. Third, we demonstrated the resolution gains using two real captured experimental datasets with different scanning steps and further explored the potential to achieve remote sensing imaging. Finally, we summarized the results, discussed the limitations of our work, and presented future research avenues.
In this study, we demonstrate a transmissive far-field FP imaging system using camera scanning, which uses a small aperture to synthesize a large aperture and an equivalent aperture expansion to improve the spatial resolution of the system. We show that for far-field applications, FP can overcome the limitation of aperture size in passive imaging systems, as well as the requirement of confocal and co-phase sparse aperture in active imaging.
2. Analysis of the Macroscopic FP Principle
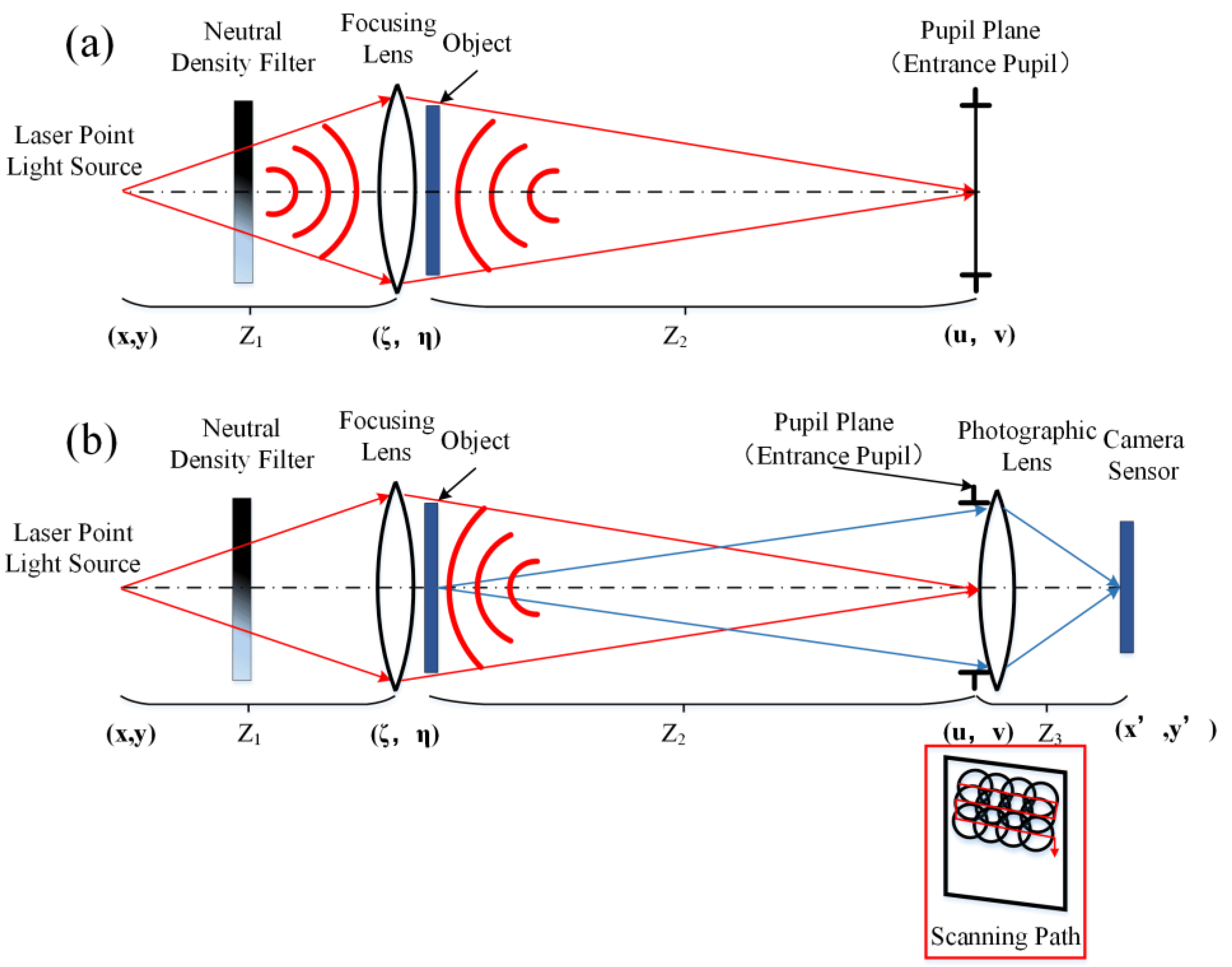
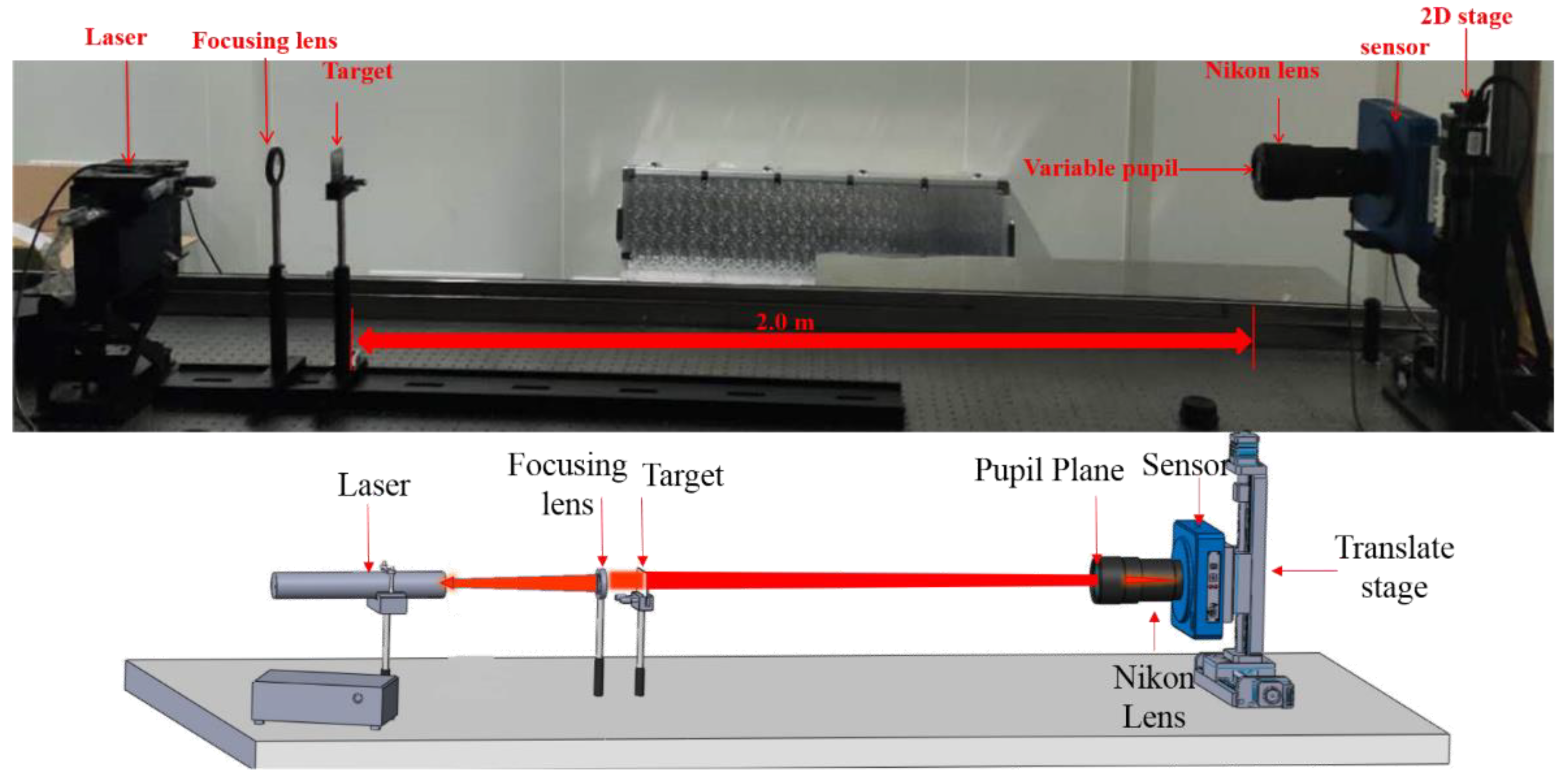
We used the Fraunhofer diffraction theory to verify the mathematical model of the proposed macroscopic FP method. The schematic and experimental configurations of the macroscopic FPs are shown in
Figure 1. The coherent light source and camera sensor were located on opposite sides with respect to the object.
As shown in
Figure 1a, the laser point light source emits a divergent spherical wave that propagates to the focusing lens and becomes a converging spherical wave, illuminating the object imaged at the pupil plane. In this experiment, in order to effectively control the system energy, we placed a neutral density filter behind the laser point light source. The distance between the light source and the focusing lens is
, and the distance between the object and the pupil plane is
. The amplitude distribution of the object near the focal position of the point light source is the Fraunhofer approximation pattern, which is located at the pupil plane (entrance pupil) of the photographic lens.
As shown in
Figure 1b, the scanning path of the camera is in the red box. In addition, the light field emitting from the object propagates distance
toward the pupil plan, and the image of the object is finally imaged on the camera sensor.
The spatial coordinates and frequency coordinates of the system are shown in
Figure 1.
represents the spatial coordinates corresponding to the plane where the lighting source is located,
represents the spatial coordinates corresponding to the object plane,
represents the frequency coordinates corresponding to the pupil plane, and
is the spatial coordinates corresponding to the plane of the camera sensor.
2.1. Far-Field Fraunhofer Approximation
On the basis of the macroscopic far-field FP imaging model shown in
Figure 1 and assuming that the distance between the object and camera sensor
satisfies the far-field Fraunhofer approximation, we obtained the following relationship [
6,
8,
9]:
where
is the distance between the object and the pupil plane,
d is the diameter of the entrance pupil of the photographic lens, and λ is the wavelength of the laser source.
The laser point source emits coherent light with a wavelength of
nm, and the focal length of the focusing lens is
with a
f-number of
, creating the entrance pupil of
. The Fraunhofer far-field distance calculated is defined as
Thus, for Equation (2) to hold, the camera should be placed at least 166 m away from the object. With such a large distance between the object and the photographic lens, the Fourier transform of the object will always appear on the image plane of the laser point light source. To avoid this, we used a focusing lens to converge the light emitted by the point source to the pupil plane of the photographic lens [
7].
2.2. Forward Model
The laser point light source emits a wave filed that is monochromatic with wavelength and is spatially coherent across the surface of the object. The illumination light field interacts with the object, and part of the light field reaches the camera sensor through the imaging system. The light field emitted from an object is a two-dimensional complex field .
The light filed from the object
propagates a distance
toward the imaging system to satisfy the far field Fraunhofer approximation. The field at the pupil plane
is related to the light field at the object
through a Fourier transform.
Because of the finite diameter of the photographic lens, only a portion of the light filed
can be imaged onto the camera sensor. Let the pupil function be given by
. For an ideal circle pupil,
is given by
where
is the semi-diameter of the entrance pupil of the photographic lens.
The light field at the pupil plane
is low-passed by pupil function (or coherent transfer function) to form an image of the object at the camera sensor.
Because the camera sensor only detects optical intensity, the LR image measured by the camera is
where
is the Fourier transform, and
is the inverse Fourier transform.
The equivalent coherent transfer function (CTF) after aperture synthesis most appropriately reflects the characteristics of FP imaging, and thus the equivalent coherent transfer function corresponding to FP synthetic aperture imaging is derived herein.
where the relationship of relative position between the individual sub-aperture centers can be expressed as Equation (8):
where
the overlap denotes the spectrum overlap ratio,
represents the total number of camera scans, and
is the diameter of the pupil of the photographic lens.
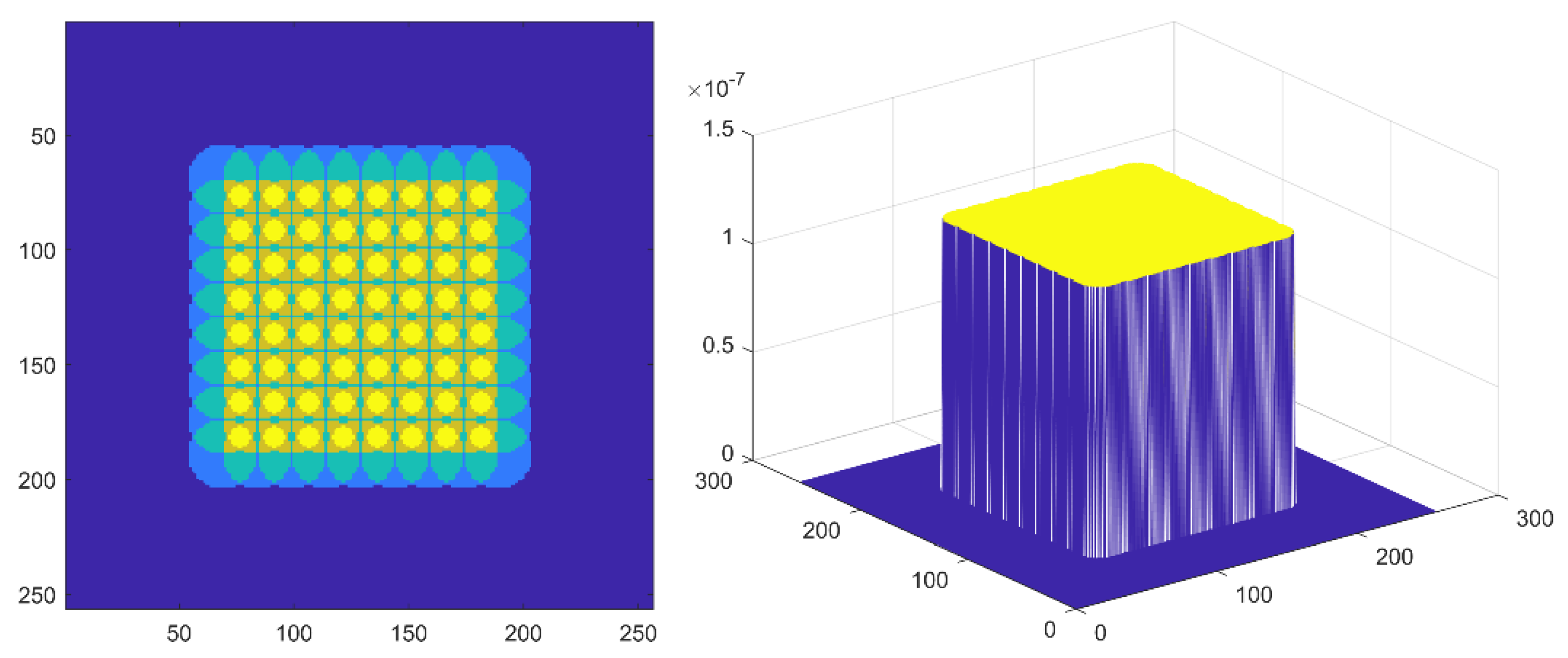
The synthetic aperture range corresponding to a single aperture after a two-dimensional scanning translation stage is presented in the left side of
Figure 2, whereas the right side represents the derived equivalent synthetic aperture coherence transfer function expressed by Equation (7). As observed, the two results were highly similar.
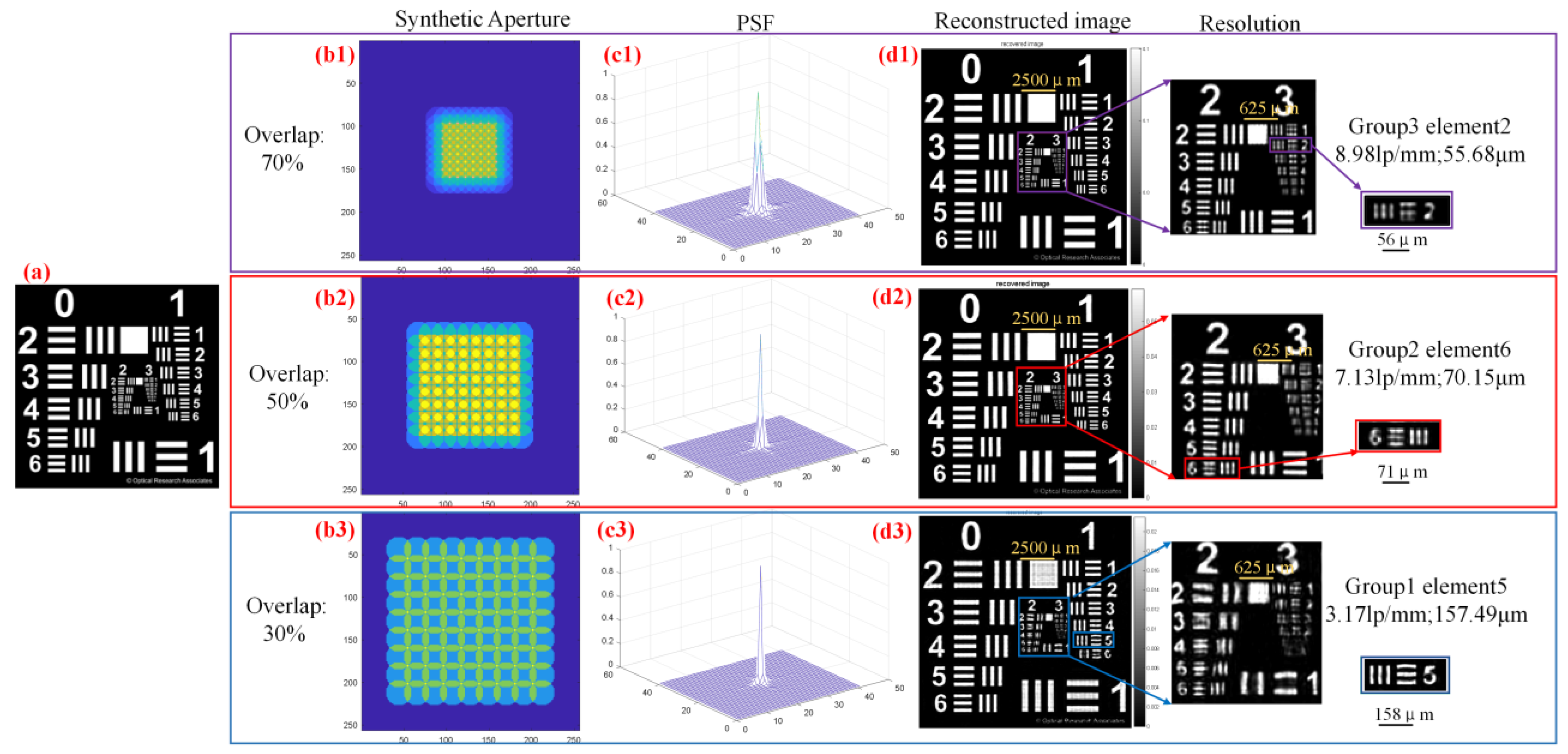
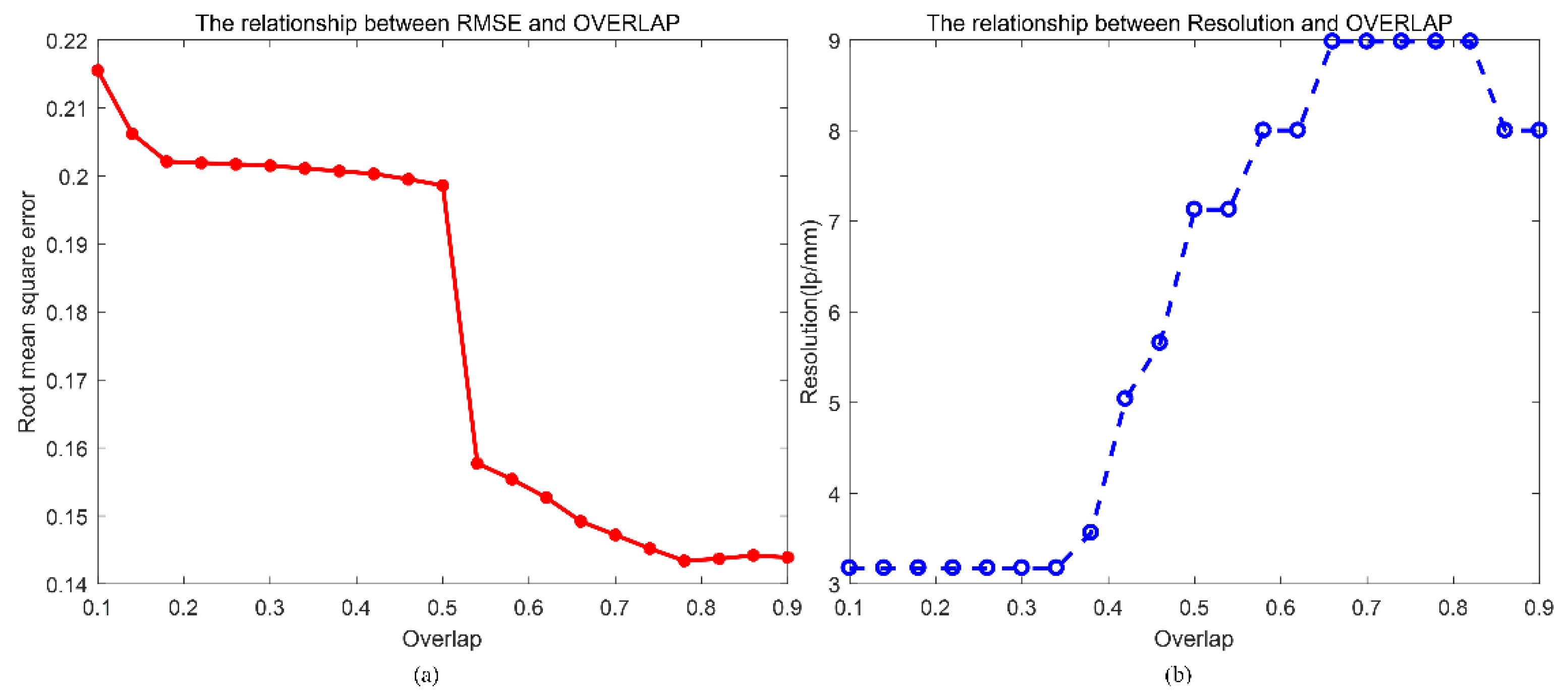
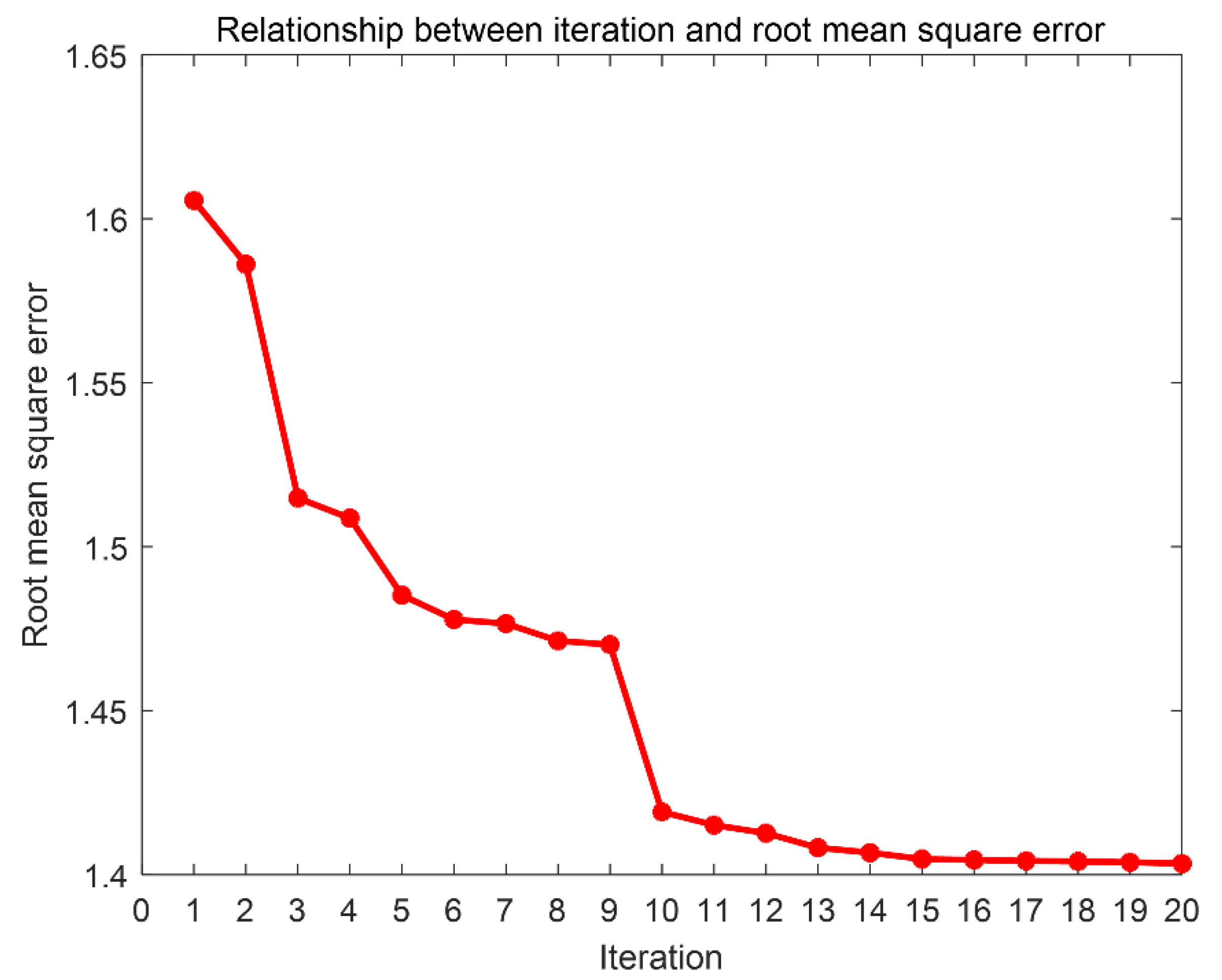
The iterative algorithm of FP imaging shows that the quality of the reconstructed image is also related to the amount of overlap between adjacent images. The effect of overlap ratio on the reconstruction of the ptychography iterative engine (PIE) has been described clearly [
10,
11]; meanwhile, we directly ported the results from real space PIE to spectrum plane of FP and studied the effect of the root mean square error (RMSE) and resolution of high-resolution image. Therefore, in this study, we scanned the spectrum plane of the object using a camera to acquire low-resolution images with a varying amount of overlap between adjacent images, which determined the distance the camera + image lens movements and the image reconstruction quality and is the important parameter we have to consider.
5. Results
We tested the proposed method with two real captured datasets with scanning steps of 4.5 and 2 mm, respectively. We used an object placed 2 m away from the pupil plane of the imaging lens. First, a total of 225 LR images with resolution of 231 pixel × 231 pixel was obtained with a scanning step of 4.5 mm and a 61% overlap ratio between two adjacent images. Second, by changing the scanning step to 2 mm and with an 84.5% overlap ratio between adjacent images, we obtained 361 LR images with the same resolution.
Figure 11 is the dataset under multiple acquisitions showing different results under two different far-field FP experimental setups.
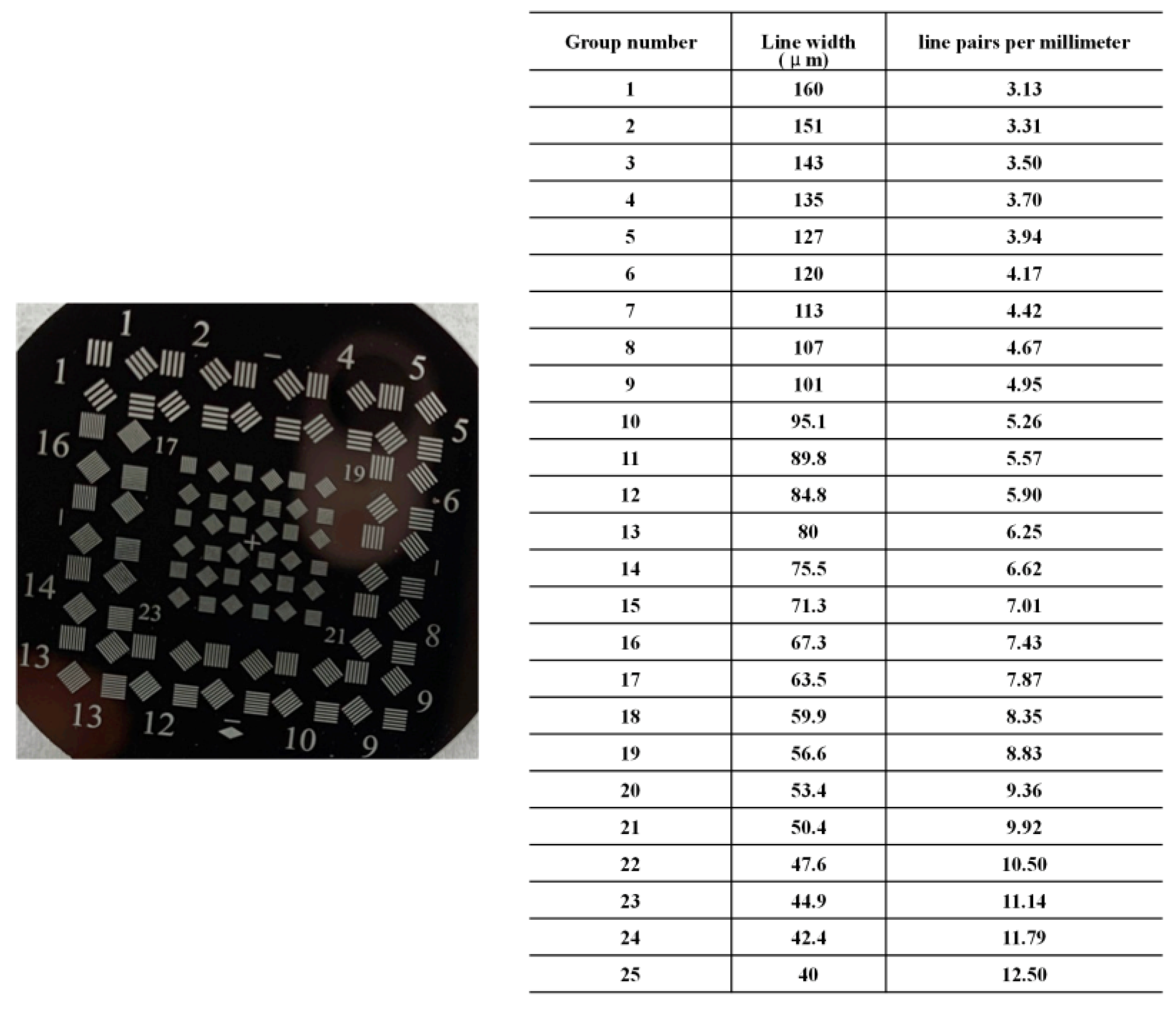
Figure 11a, with a scanning step of 4.5 mm and 61% overlap ratio, is an original sequence image composed of 225 LR images with 160 μm line width and 3.13 lp/mm resolution.
Figure 11b, with a scanning step of 2 mm and 84.5% overlap ratio, shows a set of images with 361 LR intensity images with the same resolution.
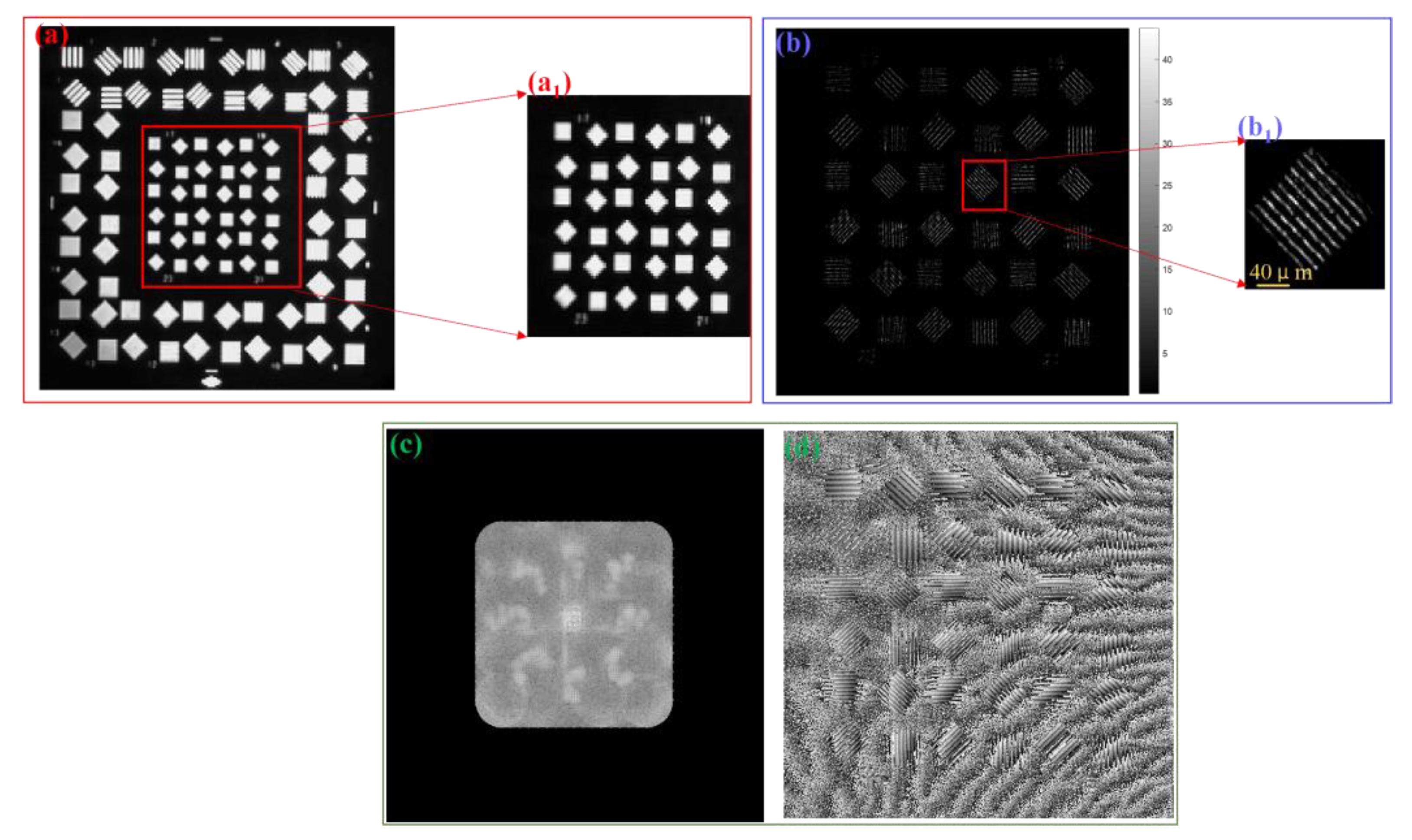
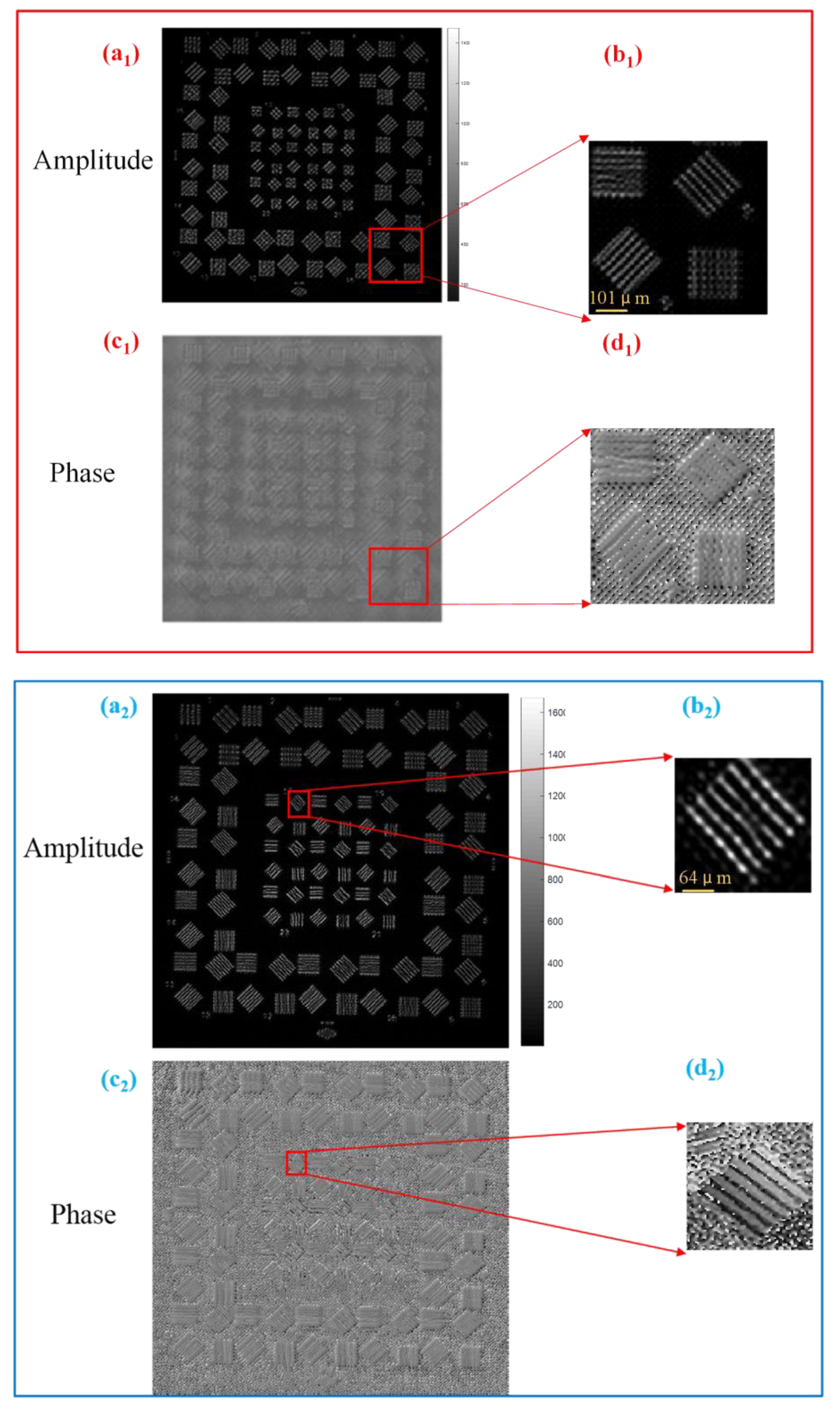
In
Figure 12, the images in the red box were recovered from 225 LR images with 231 pixel × 231 pixel and a scanning step of 4.5 mm. Using a personal computer (9th Generation Intel Core i7), we found the single iteration time to be 3 s, and the data converged after 10-15 iterations. The total recovery time was approximately 30~45 s. The reconstructed detailed information of the object is shown in
Figure 12(a1,b1).
Figure 12(c1) shows the phase of the reconstructed HR image.
Figure 12(d1) shows the zoomed-in phase of Group 9 HR image. Meanwhile, the images in the blue box were recovered from 361 LR images with 231 pixel × 231 pixel with a scanning step of 2 mm. The single iteration time was 5 s, and the data converged after 15~25 iterations. The total recovery time was approximately 80–130 s. Group 17 of the HR object (
Figure 12(a2)) is shown in
Figure 12(b2).
Figure 12(c2) shows the phase of the reconstructed HR image.
Figure 12(d2) shows the zoomed-in phase of Group 17 HR image. The recovery algorithm with a longer scanning step has a shorter running time and higher efficiency.
Comparing the experimental results with the two scanning steps (4.5 and 2 mm), we found that when the scanning step was decreased, the increase in the spectrum overlap ratio greatly improved the recovered HR image. The two experiments directly proved the validity of the simulation results along with the correctness, efficiency, and effectiveness of the imaging equations and phase retrieval algorithm.
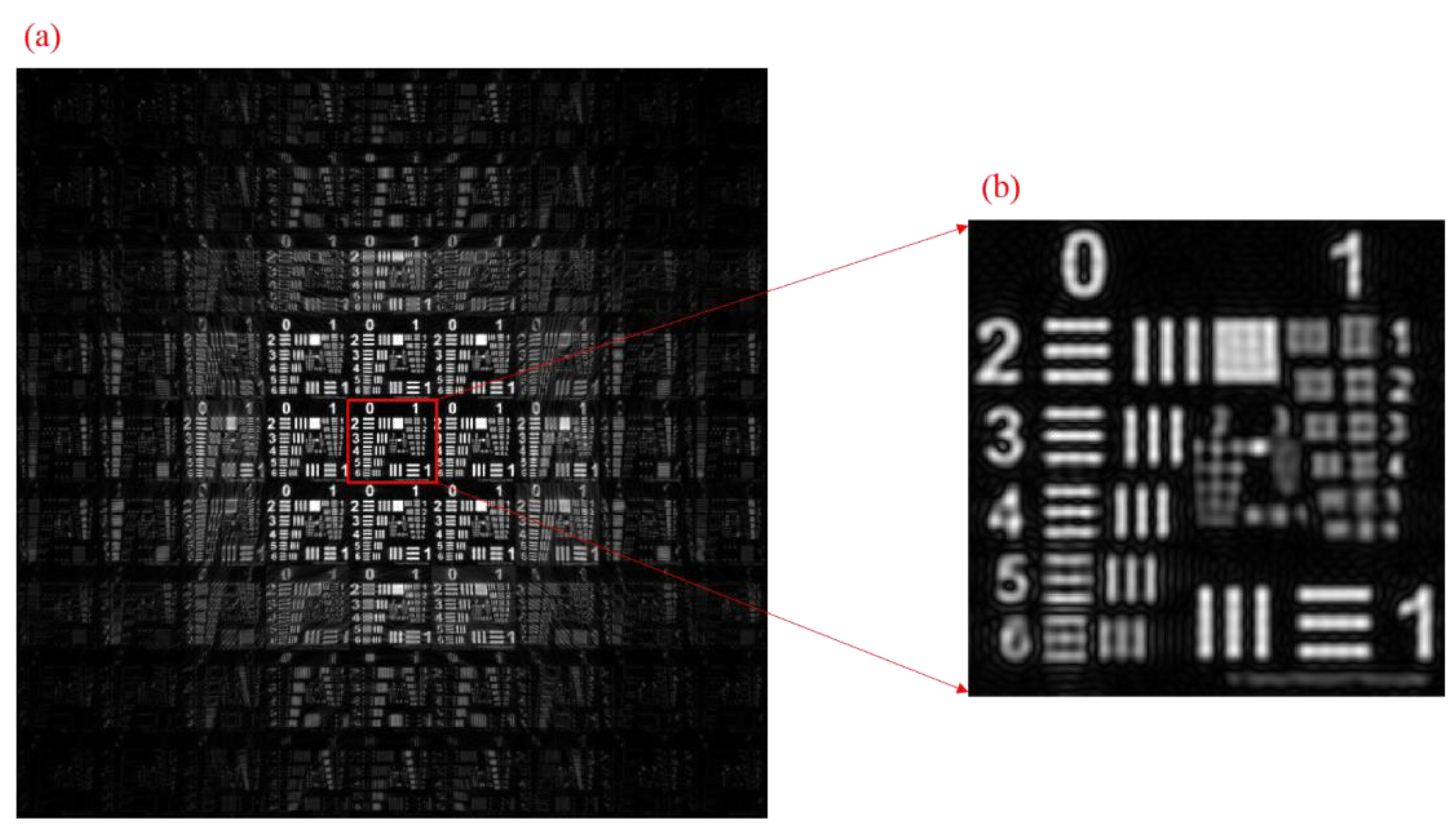
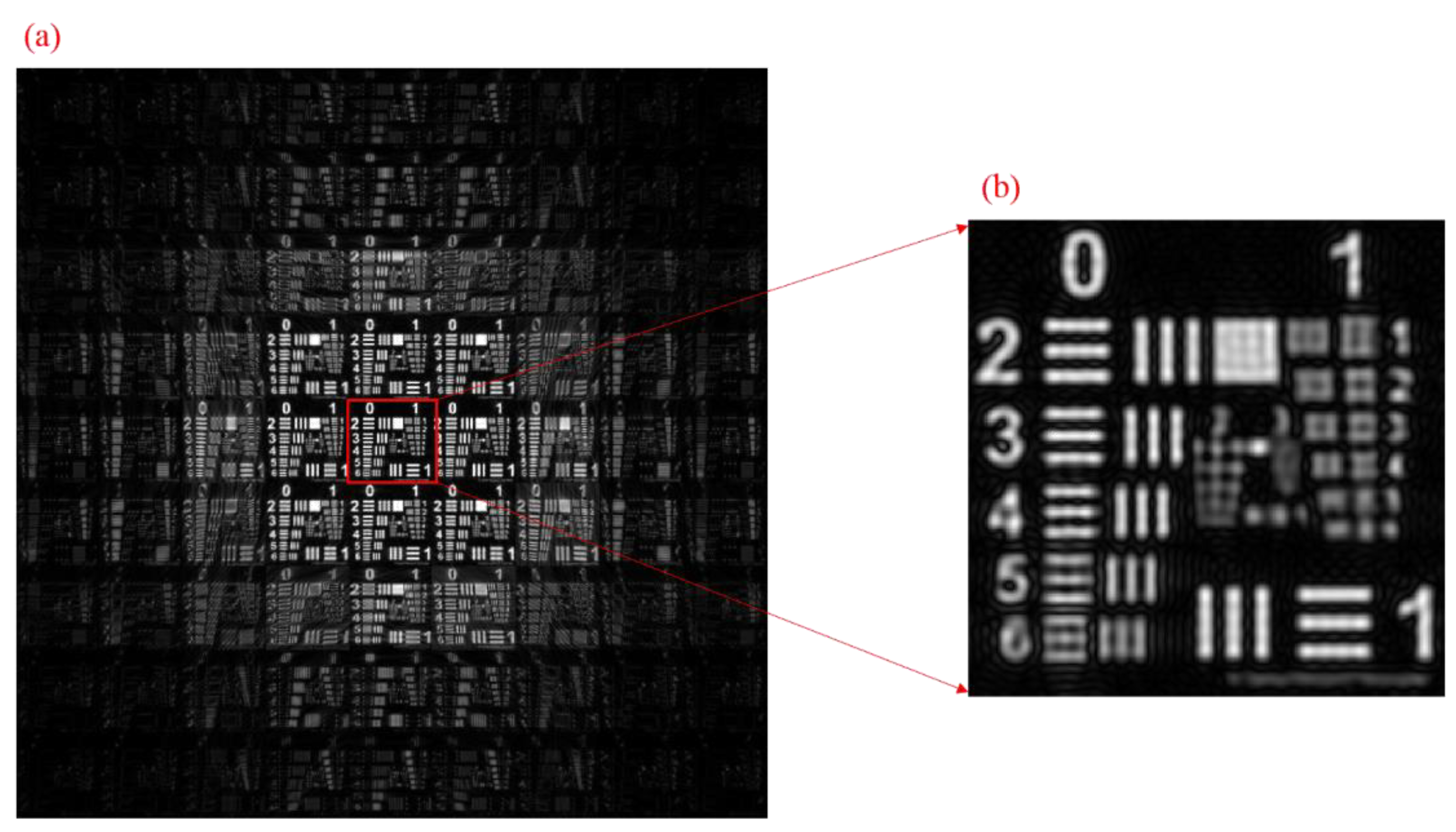
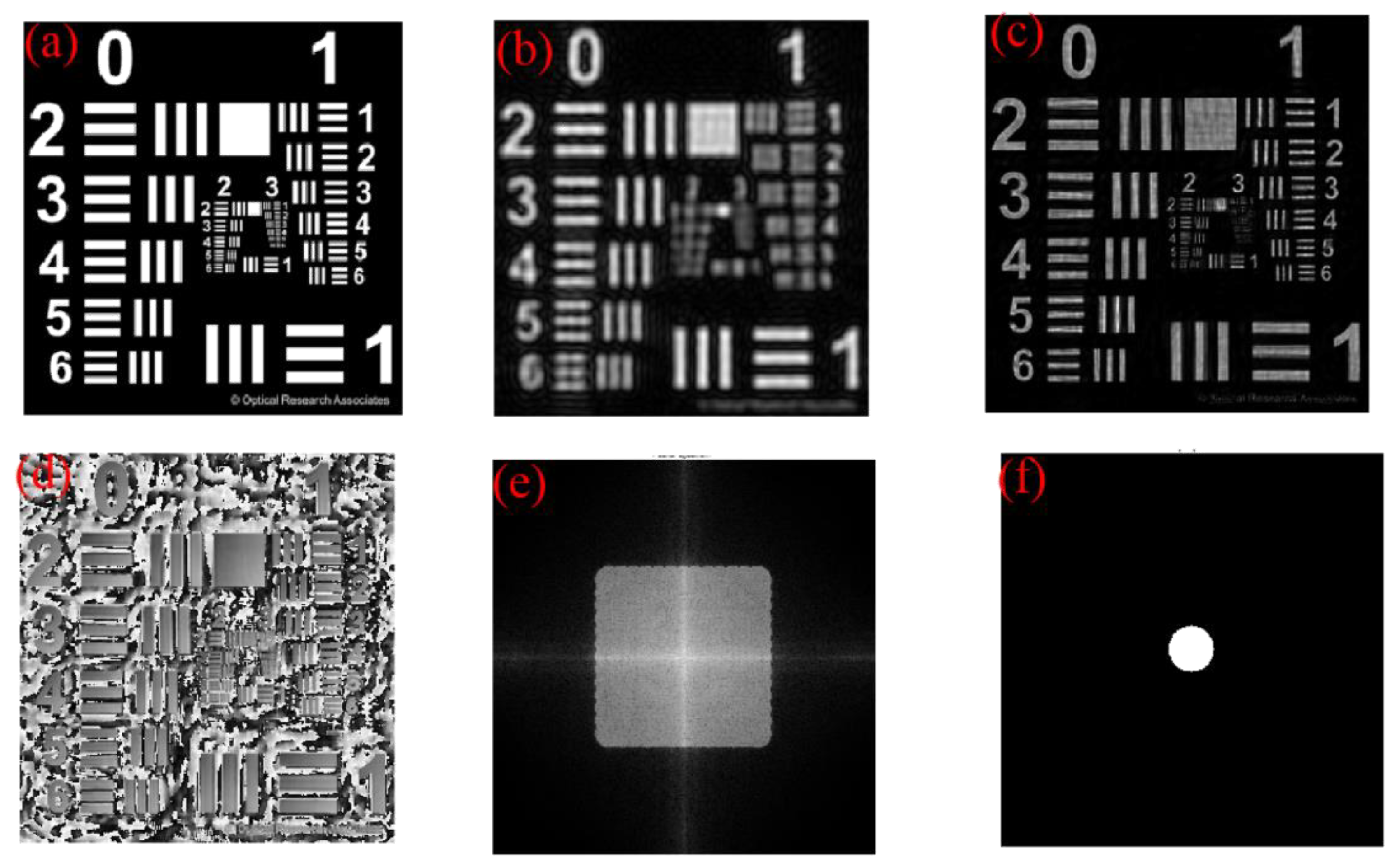
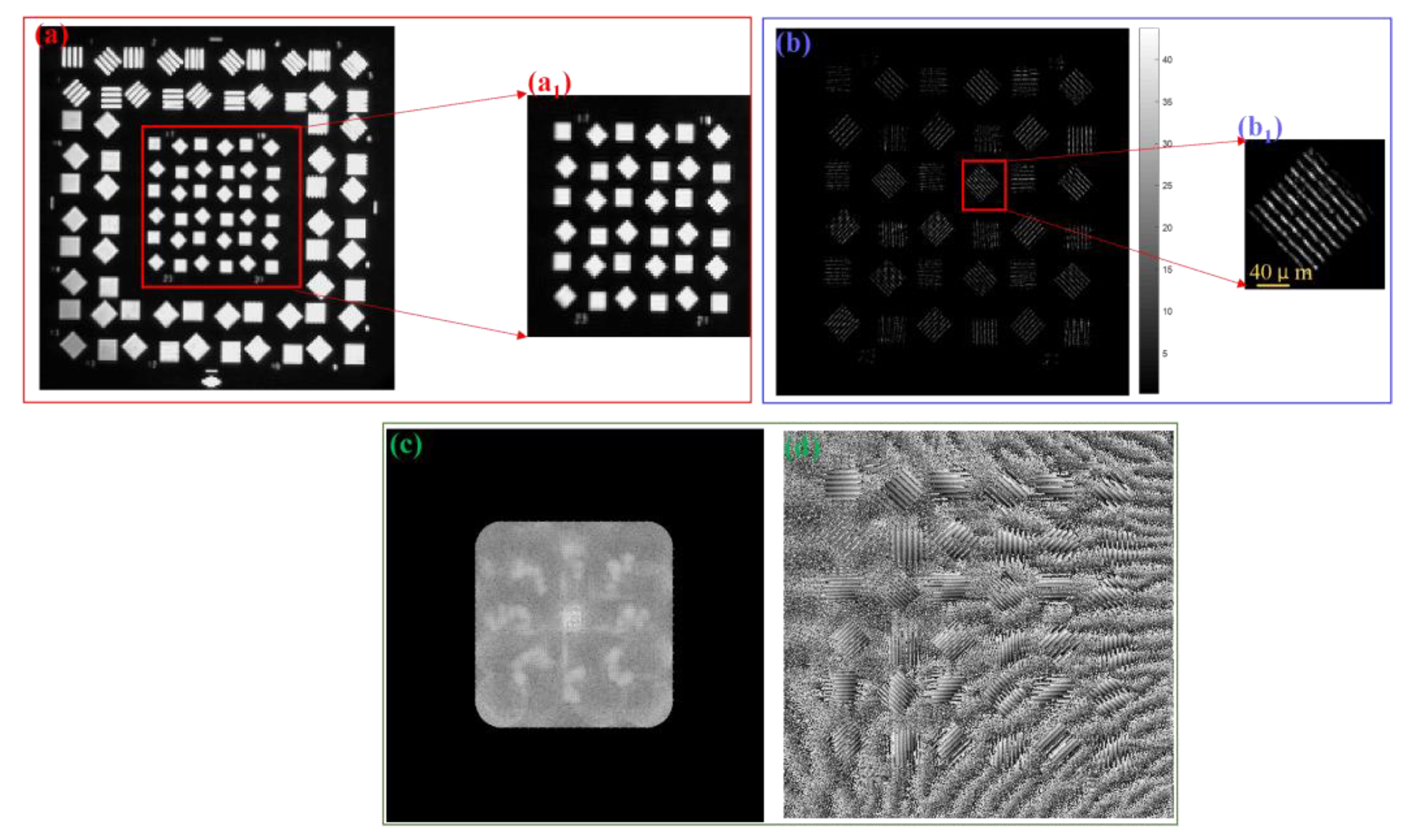
We further processed the images with a scanning step of 2 mm with partition reconstruction, which involved cutting the image into smaller objects for reconstruction. We chose to intercept the central position objects of each LR image for reconstruction. The above algorithm was used to reconstruct the intercepted images again, and the reconstruction results are shown in
Figure 13. From the results, we found that the partition reconstruction can effectively reduce the effect of the aberrations and reconstruct smaller feature with higher image quality than HR image reconstructed by full-frame reconstruction. Partition reconstruction yields better results than full-frame reconstruction. For example, full-frame reconstruction can only resolve the feature of Group 17 on the object, as shown in
Figure 12, while partition reconstruction can even resolve Group 25 with a 40 μm line width of 12.5 lp/mm and a resolution gain of 4×.
Finally, LR images with different off-axis aberrations at different locations were acquired by camera scanning. Although the FP algorithm has a certain correction effect on the aberration, it is more effective to correct the aberration at different positions of the same image by using the partition reconstruction method to obtain more high-frequency image details.
To allow a clearer comparison of the image quality of the high-resolution intensity images in the three cases, we compared the resolution and calculated the corresponding signal to noise ratio (SNR) [
14], as shown in
Table 1. As we can tell from the table, the partition reconstruction can improve the image resolution and the SNR at the same time.
6. Discussion
In the current system, the higher the sensitivity of the camera, the higher the dynamic range images that can be captured, which provides more powerful conditions for the reconstruction of the high-resolution image using the FP algorithm. However, under the current conditions of our experimental setup, insufficient sampling of low-resolution images affects the quality of the reconstructed image and fails to recover even small resolution features. In addition, we believe that changing to a larger object or a different camera sensor may effectively solve this problem.
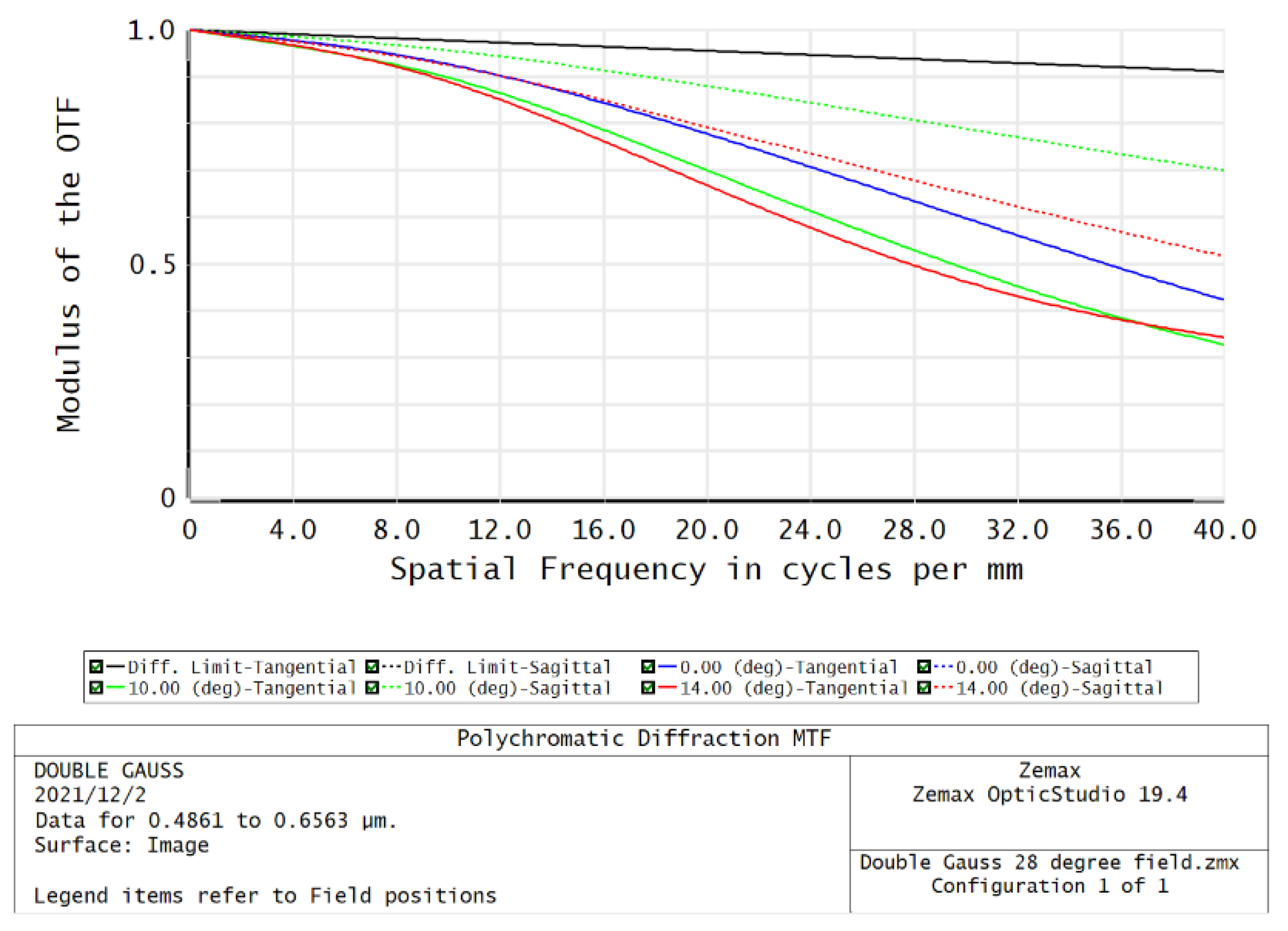
In addition, we find that the stripes in the diagonal direction can recover better, which may be caused by the imaging capability of the imaging lens. As shown in
Figure 14, the modulation transfer function (MTF) of the imaging lens has different values in the S and T directions. Therefore, in a certain direction, the spatial frequency can pass well. Verification of this hypothesis will be carried out in follow-up work [
15]. The
Figure 14 is only a sketch map, and we can see that the imaging ability of the lens is different in different directions.
Now, while we addressed the image misalignment arising from camera movement, for far-field FP imaging, the slight position errors in the camera’s movement will change the spectrum redundancy information, and the imaging contrast may not be significantly reduced. The missing information in the Fourier plane causes obvious errors in the image reconstruction process, which may result in poor intensity images in a certain direction. Next, we plan to address this deficiency, improve the experimental conditions, and strengthen phase retrieval algorithm research to obtain higher-resolution complex images [
16,
17,
18,
19,
20,
21].
Another consideration that must be addressed is the relationship between the performance of the proposed technique and the associated hardware [
22,
23,
24]. For example, the stripes in certain directions cannot be correctly resolved on the basis of the orientation characteristics of the imaging lens. Thus, we plan to improve the experimental conditions, replace the camera, and study various interference components of the system [
22].
Additionally, we will adapt the active coherent illumination imaging system on the basis of the far-field FP imaging mechanism to establish a reflective mathematical model, as well as build a reflective experimental system to realize phase recovery and super-resolution [
25,
26,
27,
28]. This can overcome the limitation of the system aperture on spatial resolution improvement in the passive non-coherent imaging system, and thus will demonstrate the potential of this technology in remote sensing applications.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}