
Method of Eliminating Helicopter Vibration Interference Magnetic Field with a Pair of Magnetometers


Abstract
:1. Introduction
2. Traditional Aeromagnetic Compensation Model
3. Vibration Interference Magnetic Field
4. The Proposed Method and Principle
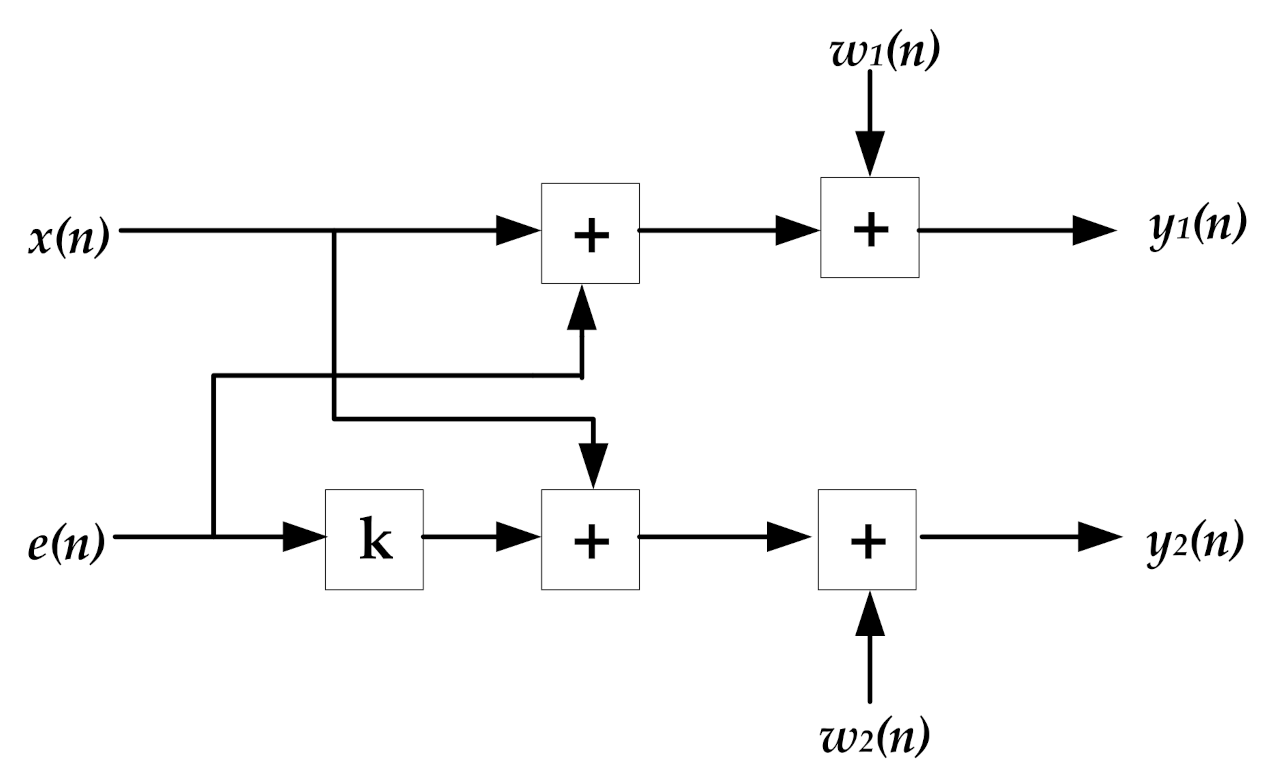
4.1. The Adaptive Interference Cancelation Method
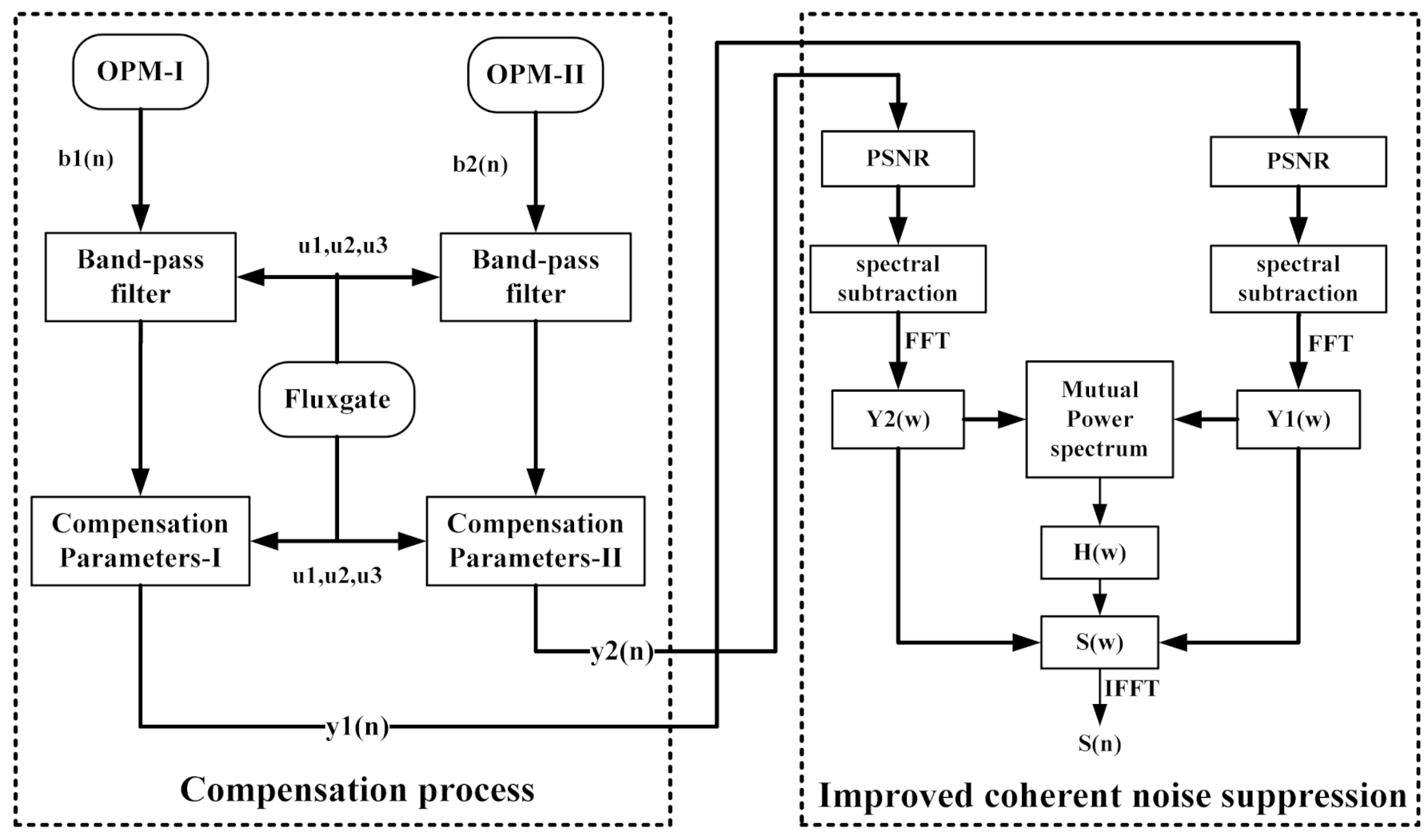
4.2. The Improved Coherent Noise Suppression (ICNS) Method
5. Results and Discussion
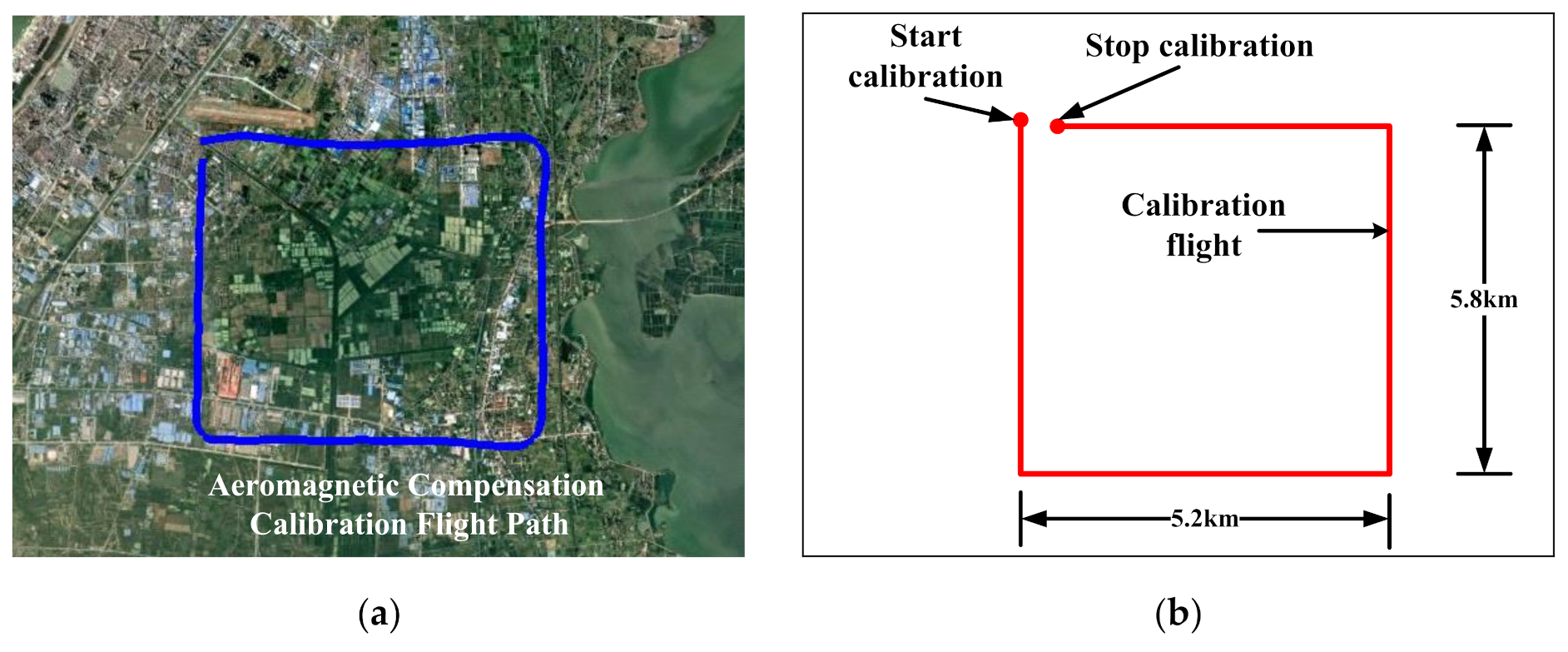
5.1. The Results of the Calibration Flight
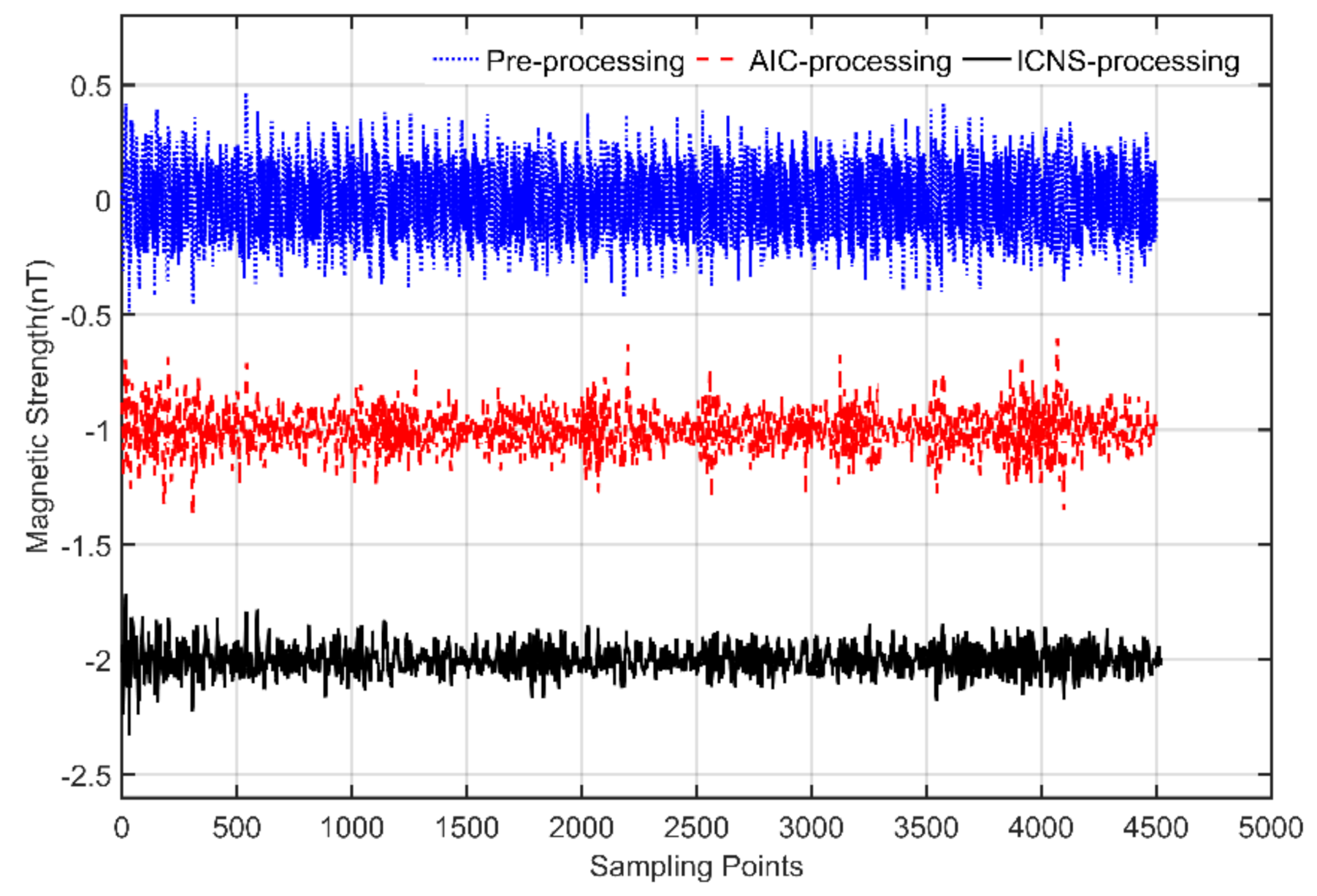
5.1.1. Results of Adaptive Interference Cancelation (AIC)
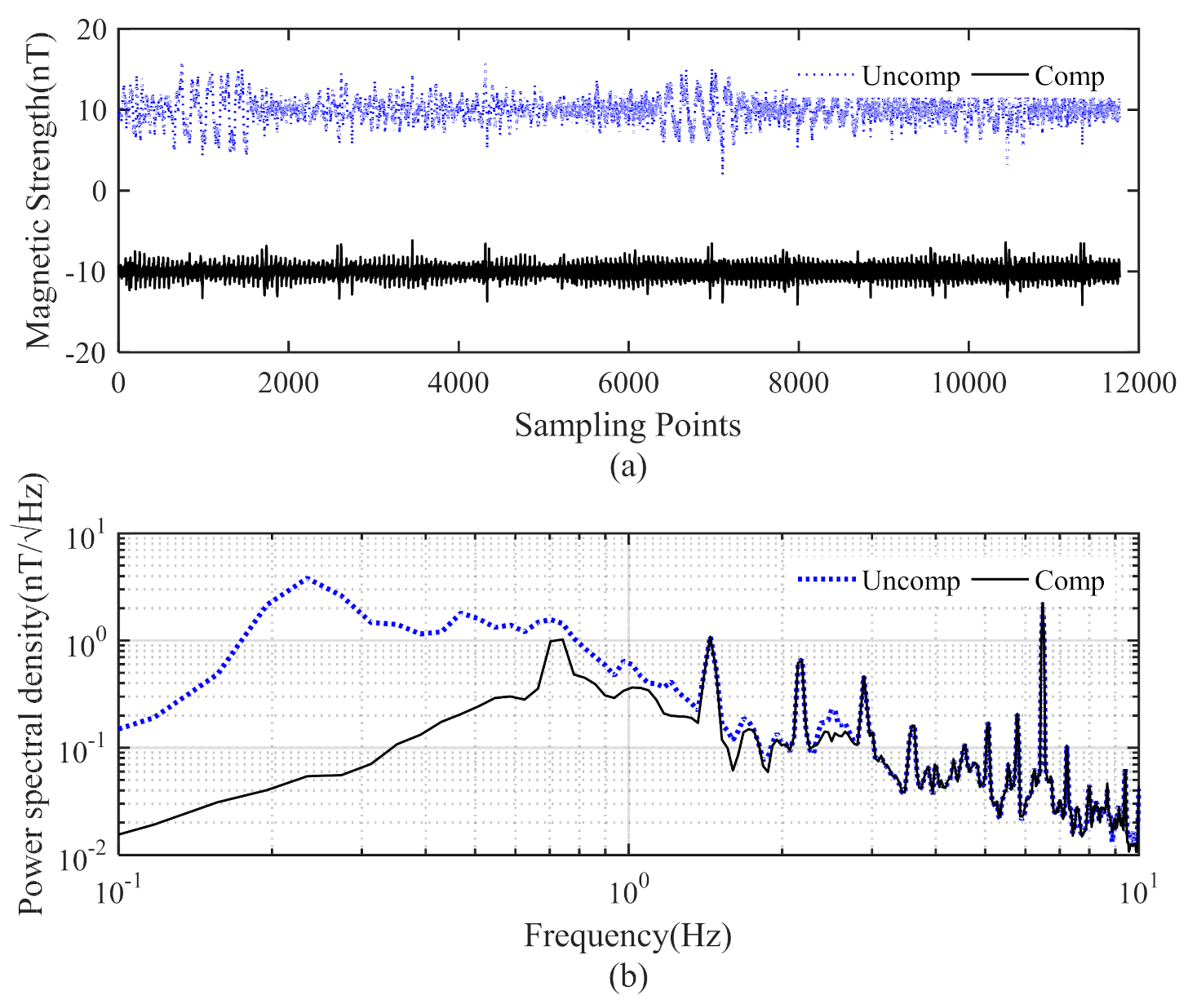
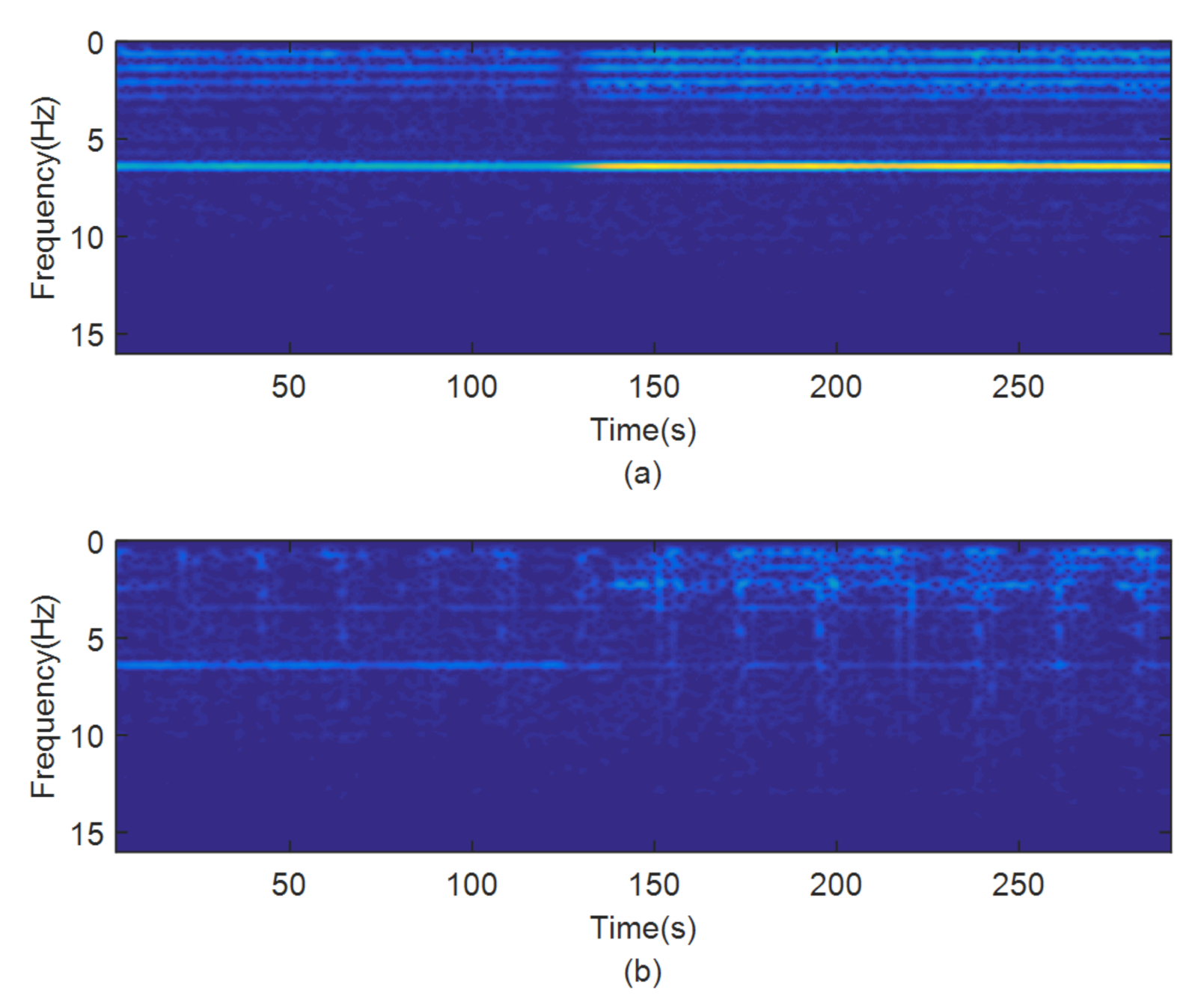
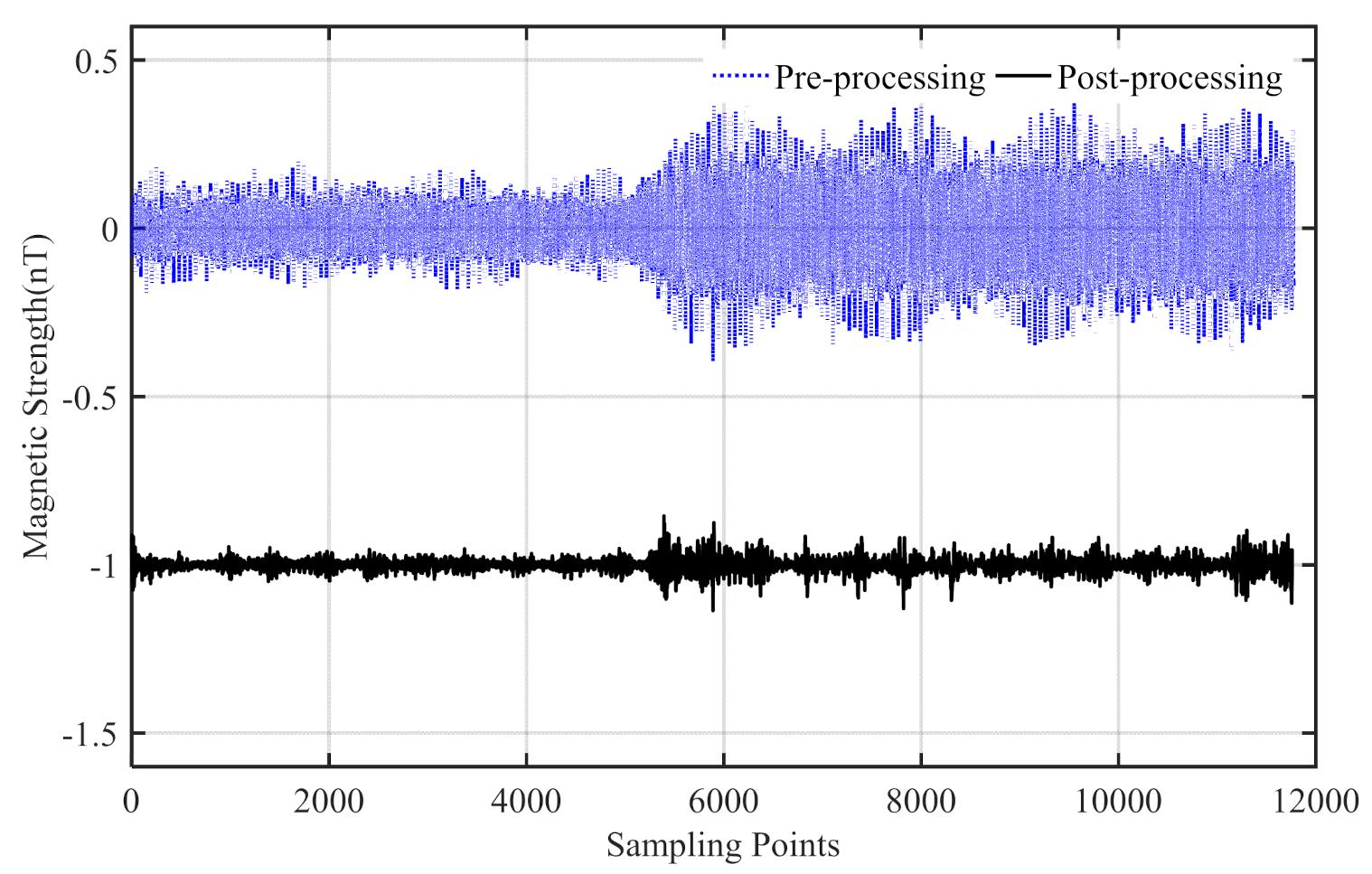
5.1.2. Results of the Improved Coherent Noise Suppression Method
5.2. The Results of the Detection Experiment of Target
5.3. The Discussion of the Results
- (1)
- The traditional T–L aeromagnetic compensation model can only eliminate the interference magnetic field associated with the attitude of the manned helicopter, and its effective working frequency band is generally lower than 2 Hz.
- (2)
- The ICNS-based method proposed in this paper can eliminate the interference field caused by the probe vibration and has little influence on the target signal, so it can effectively improve the detection capability of the helicopter system for low-frequency target signals.
- (3)
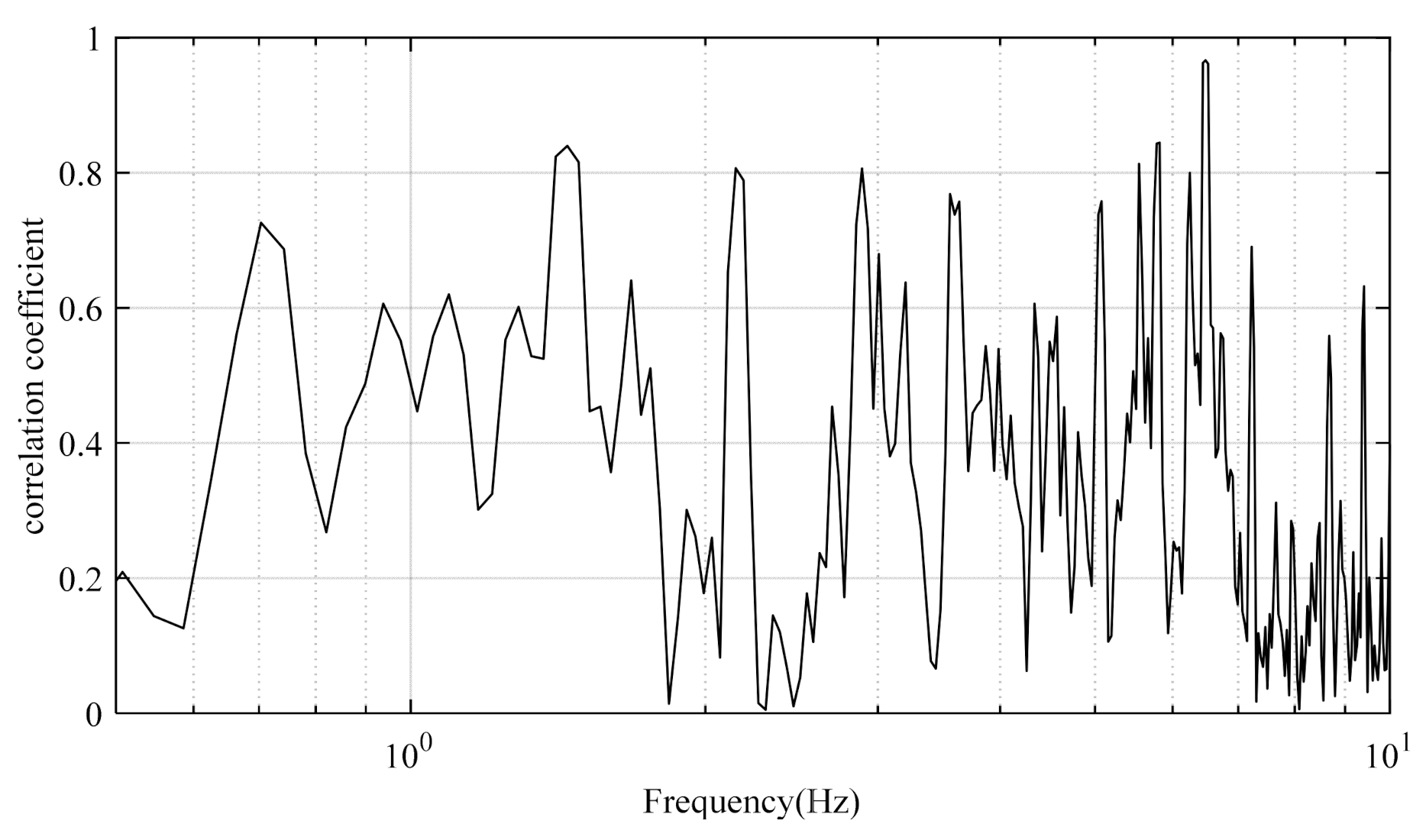
- The ICNS-based method can be used for the vibration magnetic field interference during the movement of the aircraft if the interference field has obvious correlation characteristics with a pair of magnetometers.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ioannidis, G. Identification of a Ship or Submarine from its Magnetic Signature. IEEE Trans. Aerosp. Electron. Syst. 1977, AES-13, 327–329. [Google Scholar] [CrossRef]
- Zolotarevskii, Y.M.; Bulygin, F.V.; Ponomarev, A.N.; Narchev, V.A.; Berezina, L.V. Methods of Measuring the Low-Frequency Electric and Magnetic Fields of Ships. Meas. Tech. 2005, 48, 1140–1144. [Google Scholar] [CrossRef]
- Birsan, M. Measurement of the extremely low frequency (ELF) magnetic field emission from a ship. Meas. Sci. Technol. 2011, 22, 085709. [Google Scholar] [CrossRef]
- Wu, Z.; Zhu, X.; Li, B. Modeling and measurements of alternating magnetic signatures of ships. Sens. Transducers. 2015, 186, 161–167. [Google Scholar]
- Sun, Y.; Lin, C.; Jia, W.; Zhai, G. Analysis and measurement of ship shaft-rate magnetic field in air. Prog. Electromagn. Res. M 2016, 52, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Nabighian, M.N.; Grauch, V.J.S.; Hansen, R.O.; LaFehr, T.R.; Li, Y.; Peirce, J.W.; Phillips, J.; Ruder, M.E. The historical development of the magnetic method in exploration. Geophysics 2005, 70, 3361. [Google Scholar] [CrossRef]
- Doll, W.E.; Gamey, T.J.; Bell, D.T.; Beard, L.P.; Sheehan, J.R.; Norton, J.; Holladay, J.S.; Lee, J.L.C. Historical Development and Performance of Airborne Magnetic and Electromagnetic Systems for Mapping and Detection of Unexploded Ordnance. J. Environ. Eng. Geophys. 2012, 17, 1–17. [Google Scholar] [CrossRef]
- Hardwick, C.D. Non-oriented cesium sensors for airborne magnetometry and gradiometry. Explor. Geophys. 1984, 2, 266–267. [Google Scholar]
- Tolles, W.E. Compensation of Aircraft Magnetic Fields. U.S. Patent 2692970A, 26 October 1954. [Google Scholar]
- Tolles, W.E.; Mineola, N.Y. Magnetic Field Compensation System. U.S. Patent US2706801A, 19 April 1955. [Google Scholar]
- Leliak, P. Identification and Evaluation of Magnetic-Field Sources of Magnetic Airborne Detector Equipped Aircraft. IRE Trans. Aeronaut. Navig. Electron. 1961, ANE-8, 95–105. [Google Scholar] [CrossRef]
- Leach, B.W. Aeromagnetic compensation as a linear regression problem. In Information Linkage Between Applied Mathematics and Industry; Academic Press: New York, NY, USA, 1980; pp. 139–161. [Google Scholar]
- Hardwick, C.D. Aeromagnetic Gradiometry in 1995. Explor. Geophys. 1996, 27, 1–11. [Google Scholar] [CrossRef]
- Nelson, J.B. Aeromagnetic Noise during Low-Altitude Flights over the Scotian Shelf; DRDC-ATLANTIC, Defence R&D Canada: Ottawa, ON, Canada, 2002. [Google Scholar]
- Nelson, J.B. Predicting In-Flight Mad Noise from Ground Measurements; DRDC-ATLANTIC, Defence R&D Canada: Ottawa, ON, Canada, 2001. [Google Scholar]
- Noriega, G. Performance measures in aeromagnetic compensation. Lead. Edge 2011, 30, 1122–1127. [Google Scholar] [CrossRef]
- Noriega, G. Model stability and robustness in aeromagnetic compensation. First Break 2013, 31, 73–79. [Google Scholar] [CrossRef]
- Sheinker, A.; Moldwin, M.B. Adaptive interference cancelation using a pair of magnetometers. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 307–318. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|---|
| c1 | 34.0nT | c2 | 5.57nT | c3 | 9.27nT | c4 | 5.61 × 105 |
| c5 | 2.05 × 105 | c6 | 4.04 × 106 | c7 | 3.68 × 104 | c8 | 1.78 × 104 |
| c9 | −4.96 × 105 | c10 | −8.73 × 105 | c11 | −5.31 × 106 | c12 | 5.07 × 105 |
| c13 | −2.42 × 104 | c14 | −2.14 × 105 | c15 | −6.03 × 105 | c16 | −3.49 × 105 |
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|---|
| c1 | 302.7nT | c2 | 130.9nT | c3 | −181.1nT | c4 | 1.59 × 104 |
| c5 | 2.70 × 104 | c6 | −5.00 × 106 | c7 | 3.20 × 103 | c8 | 1.77 × 103 |
| c9 | −8.51 × 104 | c10 | −3.49 × 104 | c11 | −3.10 × 104 | c12 | 4.51 × 104 |
| c13 | −1.53 × 103 | c14 | −1.37 × 103 | c15 | −3.31 × 104 | c16 | −2.91 × 104 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Zheng, Y.; Chen, L.; Qu, X.; Fang, G. Method of Eliminating Helicopter Vibration Interference Magnetic Field with a Pair of Magnetometers. Appl. Sci. 2022, 12, 2065. https://doi.org/10.3390/app12042065
Feng Y, Zheng Y, Chen L, Qu X, Fang G. Method of Eliminating Helicopter Vibration Interference Magnetic Field with a Pair of Magnetometers. Applied Sciences. 2022; 12(4):2065. https://doi.org/10.3390/app12042065
Chicago/Turabian StyleFeng, Yongqiang, Yaoxin Zheng, Luzhao Chen, Xiaodong Qu, and Guangyou Fang. 2022. "Method of Eliminating Helicopter Vibration Interference Magnetic Field with a Pair of Magnetometers" Applied Sciences 12, no. 4: 2065. https://doi.org/10.3390/app12042065
APA StyleFeng, Y., Zheng, Y., Chen, L., Qu, X., & Fang, G. (2022). Method of Eliminating Helicopter Vibration Interference Magnetic Field with a Pair of Magnetometers. Applied Sciences, 12(4), 2065. https://doi.org/10.3390/app12042065