1. Introduction
Almost periodic oscillation is a hot research field in the study of dynamic equations (see [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21]). In recent years, many results of the various types of dynamic equations have been established related to almost periodic background including the results of the almost periodic analysis on the stochastic dynamic equations, fuzzy dynamic equations, and the dynamic equations on hybrid domains (see [
3,
12,
13,
14,
16,
17,
18,
19,
20,
22,
23,
24]). Based on the theory of translation closedness for time scales, the almost periodic functions and their generalizations were well defined and applied to study different types of dynamic models on time scales (see [
1,
3,
12,
13,
14,
15,
16,
17,
18,
19,
20,
23,
25,
26,
27,
28,
29]).
On the other hand, another important phenomenon called anti-periodic oscillation was widely studied in the last ten years, and many results were established (see [
5,
6,
10,
11,
30]). Anti-periodic functions were widely used in homogenization theory for composite materials and the continualization of discrete lattices (see [
31,
32]). It is well known that although anti-periodic oscillation belongs to a periodic oscillation, it is able to reflect a more particularly accurate oscillation in a period through the switch of its oscillation direction, and it has been widely applied in many interdisciplines (see [
4,
5,
6,
8,
9,
10,
11,
12,
13,
14,
17,
18,
19,
20,
21,
23,
25,
26,
27,
28,
29,
30,
33,
34]).
In 2017, M. Kostić introduced an interesting notion of almost anti-periodic functions in Banach space and studied the relationship between the types of anti-periodic functions and almost periodic functions in Banach spaces. After this, some related works were published (see [
8,
9,
30,
33,
34]). It is natural to ask how to define the almost anti-periodic discrete process and explore what properties they will possess. The answer of this question will make it possible to study the almost anti-periodic discrete dynamic equation and contribute to establishing almost anti-periodic results on time scales.
Motivated by the above, the main aim of this work is to introduce the notion of the almost anti-periodic discrete process of the
N-dimensional vector-valued and
matrix-valued functions and to establish the stability of the almost anti-periodic discrete solutions to the general
N-dimensional mechanical system and underactuated Euler–Lagrange system. For some relating the finite-dimensional vector spaces, one may see [
35] and the underactuated Euler–Lagrange system with
N degrees of freedom and
m independent controls (see [
36]), as well as the general
N-dimensional mechanical system (see [
4]).
2. Almost Anti-Periodic Discrete Functions
In this section, we will introduce the notions of the almost anti-periodic discrete functions for the matrix-valued function and the N-dimensional vector-valued function and establish some of their basic properties.
Definition 1. Let be an matrix-valued discrete function and be a N-dimensional vector-valued discrete function, we define If for , there exists a positive integer and , such that satisfies the following condition Then, is called the almost anti-periodic discrete function, τ is called the ε-almost anti-period of , and l is called an inclusion length. Similarly, is an almost anti-periodic matrix-valued discrete function if The set of all almost anti-periodic matrix-valued discrete functions is denoted by .
Definition 2 ([
30])
. Let be a discrete sequence, if for , there exists a positive integer such that satisfies the following conditionfor some , where . Then, is called the almost periodic discrete function and τ is called the ε-almost period of . Lemma 1. Let be an almost anti-periodic discrete function; then, it is an almost periodic discrete function.
Proof. The proof is completed. □
Through Lemma 1, the following lemma is immediate.
Lemma 2 ([
26])
. Let be an almost periodic discrete function (or an almost anti-periodic discrete function). Then, is bounded. In what follows, some basic properties of the almost anti-periodic discrete functions will be established.
Theorem 1. Let , then for all .
Proof. By Definition 1, one has
for
. Thus, we have
which means
. For
, one can obtain the desired result. The proof is completed. □
Theorem 2. Let and for some . Then, .
Proof. Since
, we have
Hence,
i.e.,
which implies
. The proof is completed. □
Theorem 3. Let and be a summable matrix sequence, i.e., If for . Then, .
Proof. Since
is a summable matrix sequence, for
, there exists
such that
By Definition 1 and Theorem 2, one has
By Lemma 2, we have
for some
and any
. Hence, we have
which means
. The proof is completed. □
Theorem 4. Let , then is an almost periodic discrete function.
Proof. Since
, we have
Hence,
which means that
is an almost periodic discrete function. The proof is completed. □
Based on the theorems above, the following result can be proved.
Proposition 1. Let , , if . Then, the following limit exists: Proof. Let
, we have
Step 1. We will prove that is bounded. Since is almost anti-periodic, by Theorem 4, we obtain , which is almost periodic. Moreover, by Lemma 2, one has , which is bounded; i.e., there exists such that .
Step 2. We will prove that
is an almost periodic discrete function. Since
is uniformly continuous on
, i.e., for
, there exists
such that
implies
for
. On the other hand,
, i.e.,
By Step 1 and
, we have
. Thus, one has
which means that
is almost periodic, i.e., for
, there exists a positive integer
such that
satisfies the following condition:
for some
and
.
Step 3. By Step 2, for
and
, there exists an positive integer
such that
satisfies the following condition:
for some
and
. Next, we will consider
and
cases.
Cases
.
. Let
, one has
Cases
.
. By Step 2, for
, one has
Moreover, for the case
, through taking
, we have
for the case
, through taking
, one has
Step 4. We will prove that the Limit (
1) exists. For any
, one has
On the other hand, by Step 3, if
, then
if
, then
for
, which indicates that the Limit (
1) exists. The proof is completed. □
Proposition 2. Let . Then, the following limit equalities hold:
- (i)
.
- (ii)
.
Proof. (i) Through using the process of the proof of Proposition 1, we can turn (i) into the following equality:
By the proof of Proposition 1 Step 2, for
, there exists a positive integer
such that
satisfies the following condition:
where
and
. Next, we will consider
and
cases. By the proof of Proposition 1 Step 3, taking
and
, the desired results can be shown.
Cases
.
. For
, we have
Therefore, Equation (
2) holds.
Cases
.
. For
, we have
for
Hence, Equation (
2) holds.
(ii) Through using the proof process of Proposition 1, we can turn (ii) into the following equality:
On the other hand, by the proof of Proposition 1 Step 2, we obtain that
is almost periodic discrete function. Hence,
i.e.,
Similarly, by the proof of Proposition 1 Step 2, we have
where
. Next, we will consider the case for
and
. By the proof of Proposition 1 Step 3, taking
and
, the desired results can be proved.
Cases
.
. For
, we have
Therefore, Equation (
3) holds.
Cases
.
. For
, it follows that
for
Hence, Equation (
3) holds. The proof is completed. □
3. Almost Anti-Periodic Oscillation of the Mechanical System
In this section, we will consider the almost anti-periodic oscillation of the general mechanical systems.
3.1. Existence and Uniqueness of the Almost Anti-Periodic Solution
Consider the general
N-dimensional mechanical system as follows:
where
,
is symmetric and
B is positive definite, the vector
collects all position dependent forces, such a linear and nonlinear stiffness forces or non-potential forces,
is an almost anti-periodic discrete function. Moreover, Equation (
4) can be rewritten as
Assume that
, i.e.,
Equation (
4) can be rewritten as
where
and
In the sequel, we will establish some sufficient conditions of the existence and uniqueness of the almost anti-periodic solution of Equation (
5).
Theorem 5. Let , the unique solution of Equation (5) with the initial value condition can be given as:i.e.,where , . Proof. Step 1, we will prove the existence of the solution of Equation (
4). For
, we have
and
, which means that
is a solution of Equation (
4).
Step 2, we will prove the uniqueness of the solution of Equation (
5). Let
and
be two solutions of Equation (
5) with the initial value condition
, then we have
Assume that
, then
. Hence,
On the other hand, , i.e., , which implies , i.e., . The proof is completed. □
Lemma 3. Let τ be a ε-almost anti-period of , if , , for and . Then,where and . Proof. Since
, we have
Hence, there exists
such that
. On the other hand,
is a
-almost anti-period of
and
, we have
i.e.,
The proof is completed. □
Now, consider the underactuated Euler–Lagrange system with
N degrees of freedom and
m independent controls by a discrete dynamic equation as follows:
where
B is a positive definite matrix denoting the inertia matrix,
C is the Coriolis matrix,
G is the gravity vector,
,
is the generalised coordinate vector, and
is the control. Assume that
, Equation (
6) can be rewritten as
where
and
Theorem 6. Let , the unique solution (7) with the initial value can be given as Proof. The proof process is similar to the proof process of Theorem 5, we will not repeat it here. □
Lemma 4. Let ,for any , and . Then, Proof. On the other hand, since
where
we have
i.e.,
. Thus,
. Since
we have
The proof is completed. □
3.2. Stability of the Almost Anti-Periodic Solutions
In this section, we will establish the stability of the general
N-dimensional mechanical system and the underactuated Euler–Lagrange system under the almost anti-periodic discrete process. Through Equations (
5) and (
7), the systems (
4) and (
6) can be turned into the following nonhomogeneous linear system
which leads to the corresponding homogeneous linear system
where
and
in Equation (
5),
in Equation (
7), where
Next, we will establish the stability of Equation (
8) to obtain the stability of Equations (
4) and (
6). For convenience, denote
,
.
Theorem 7 Then, the following results hold.
- (i)
The zero solution of Equation (9) is stable if and only ifwhere is a positive constant dependent on s. - (ii)
The zero solution of Equation (9) is uniformly stable if and only ifwhere K is a positive constant independent of s. - (iii)
The zero solution of Equation (9) is asymptotically stable if and only if - (iv)
The zero solution of Equation (9) is uniformly asymptotically stable if and only if for some constants and , .
Theorem 8. If all the conditions of Lemma 3 hold for and (or all the conditions of Lemma 4 hold for and ) and Then, Equation (8) has a unique uniformly asymptotically stable almost anti-periodic solution Moreover, Equation (4) (or Equation (6)) has an unique uniformly asymptotically stable almost anti-periodic solution. Proof. Step 1. We will prove that
is well-defined for all
. By Proposition 2 (ii) and Equation (
10), we can obtain
i.e.,
Hence,
which implies that for
, there exists
such that
for
, i.e.,
i.e.,
Hence, there exist some
and
such that
By Equation (
11), one has
Hence, the series
converges, which implies that the following series converges:
Hence, for
this series converges for
. Therefore, we prove that it is well-defined.
Step 2. We will prove that
is a solution of Equation (
8). Since
which means that
is a solution of Equation (
8).
Step 3. We will prove that the solution of Equation (
8) is an almost anti-periodic discrete process. By Step 1, we have
for
. Hence, there exists
such that
Hence, by Lemma 3 (or Lemma 4), we have
for
and
which means
Therefore, we obtain that the solution of Equation (
8) is an almost anti-periodic discrete process.
Step 4. We will prove that
is an unique uniformly asymptotically stable almost anti-periodic solution. By Step 1 and Equation (
10), we have
for some
,
and
. Hence, for
, we have
Thus, by Theorem 7, is an unique uniformly asymptotically stable almost anti-periodic solution. The proof is completed. □
Theorem 9. then the solution of Equation (10) is unstable. Proof. On the other hand, by Equation (
12), there exists some
such that
which means
Next, by contradiction, we will show the solution of Equation (
10) is unstable. Assume that the solution of Equation (
10) is stable, by Theorem 7, there exists
such that
it is a contradiction with
for
. Hence, the solution of Equation (
10) is unstable. The proof is completed. □
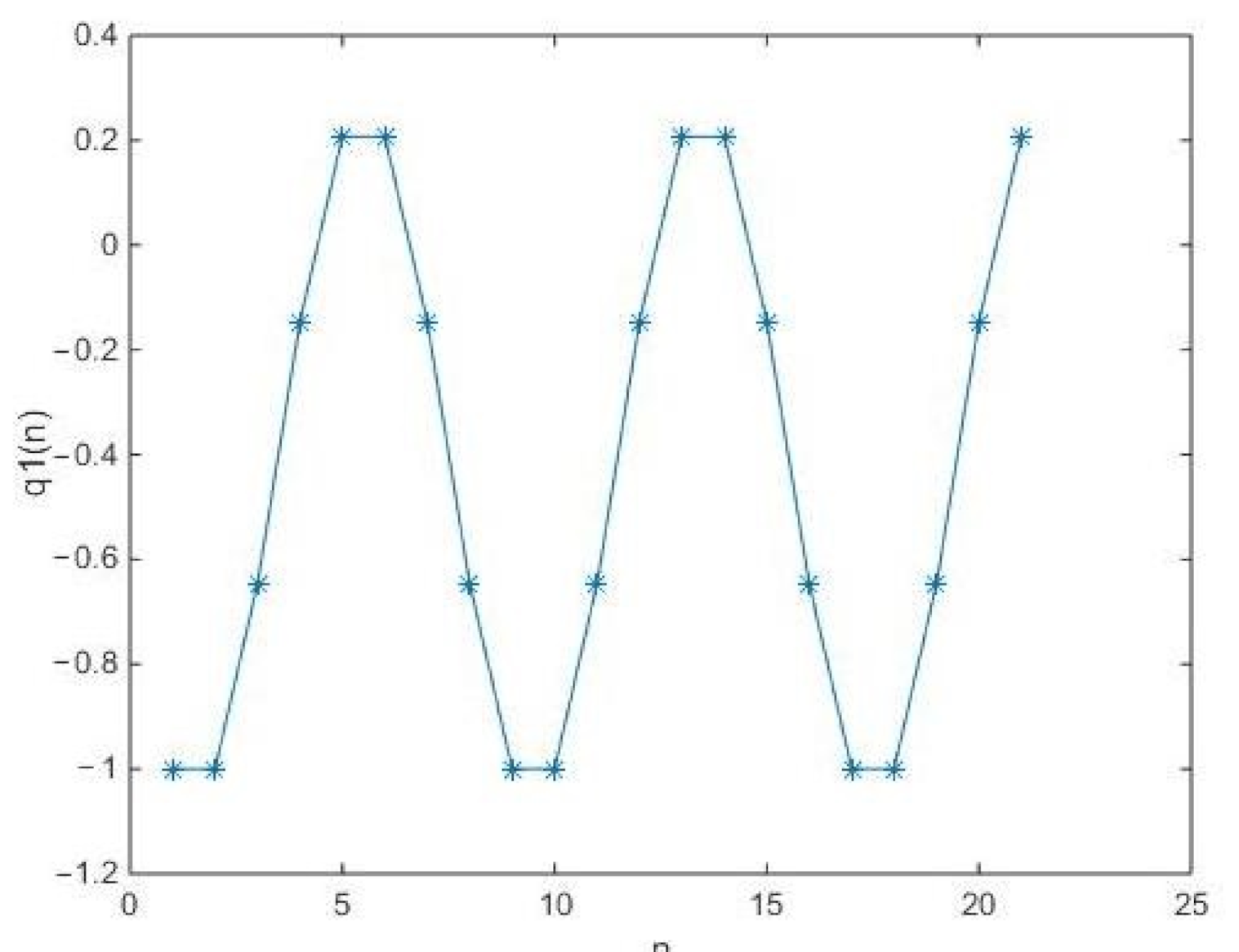
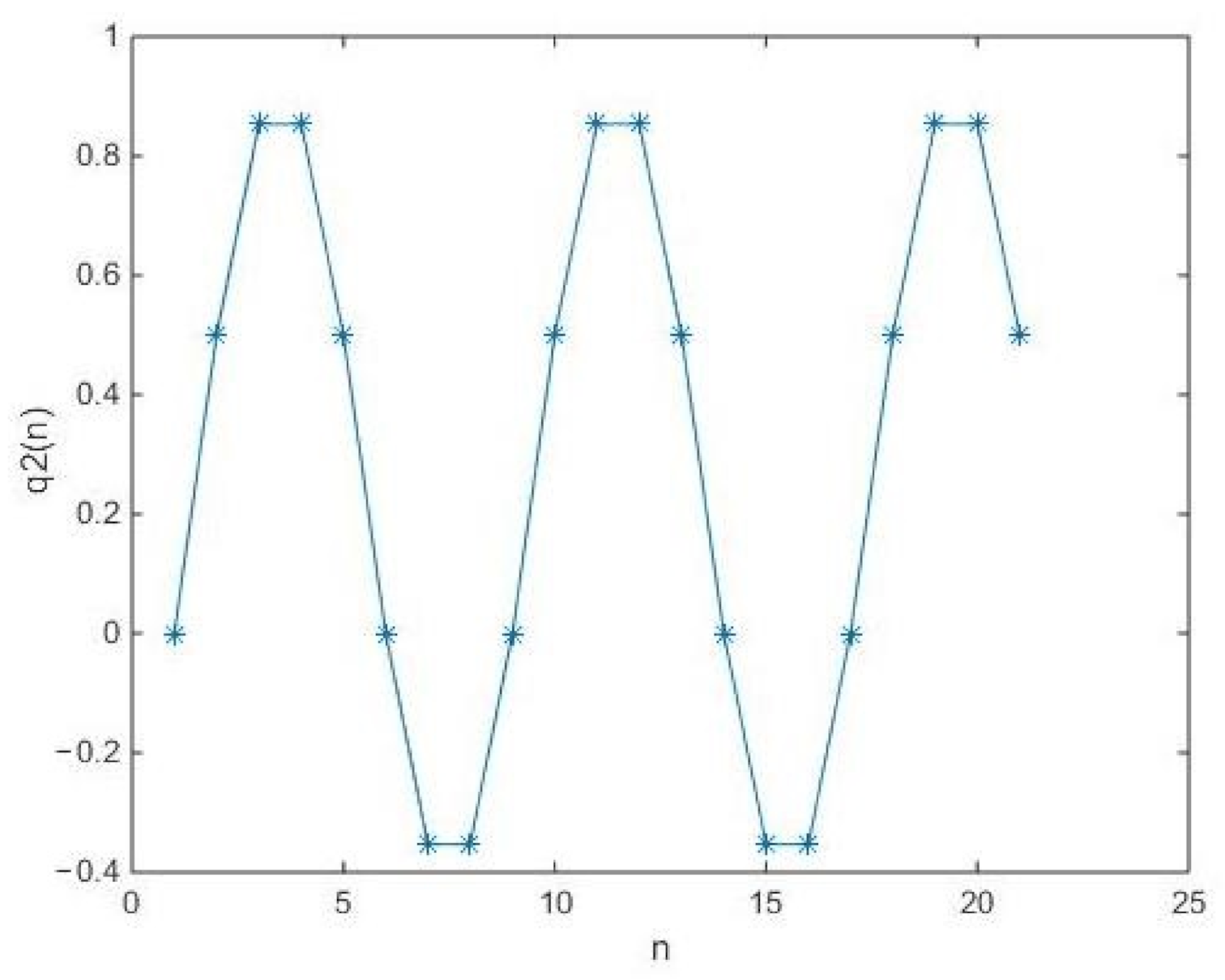
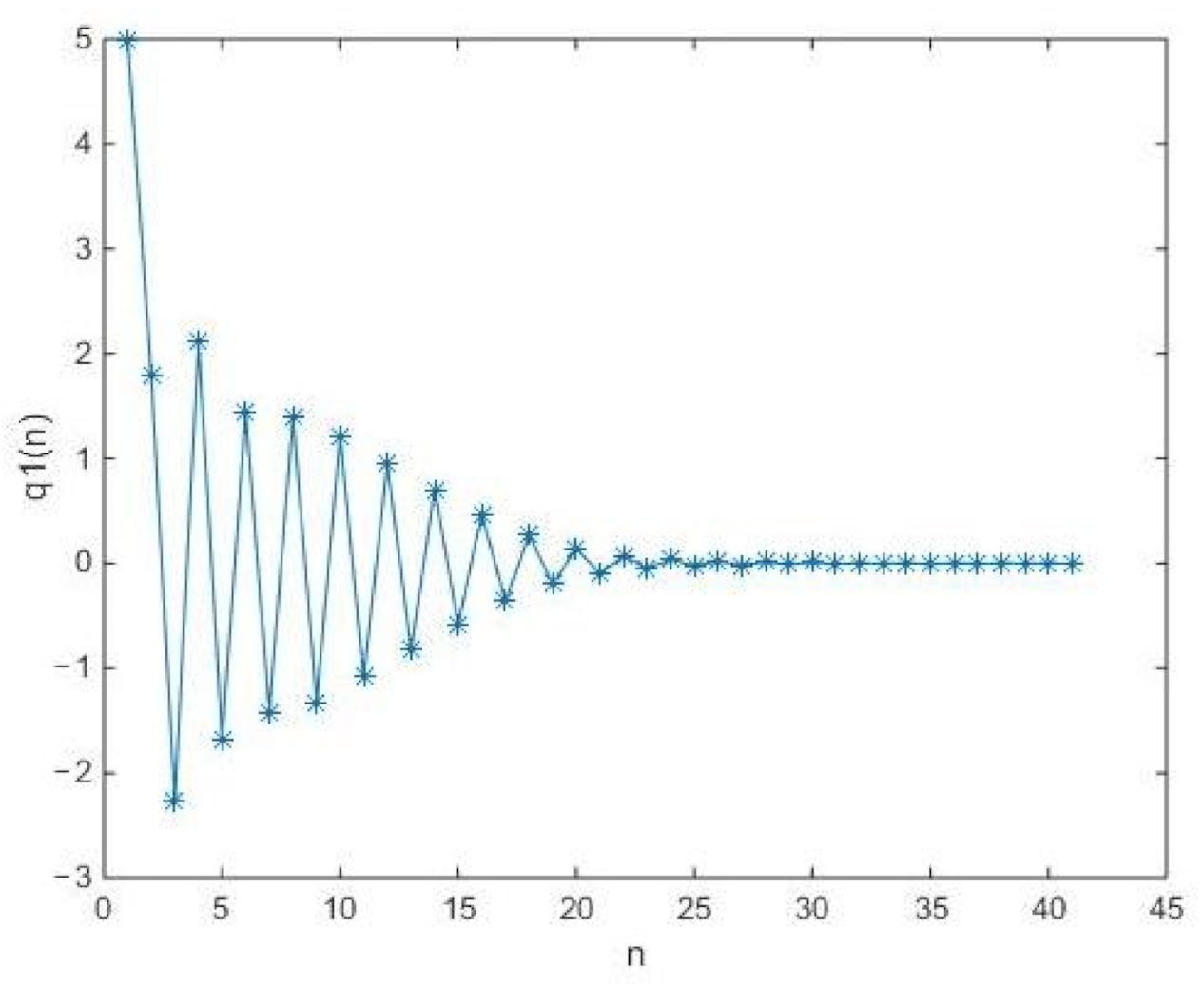
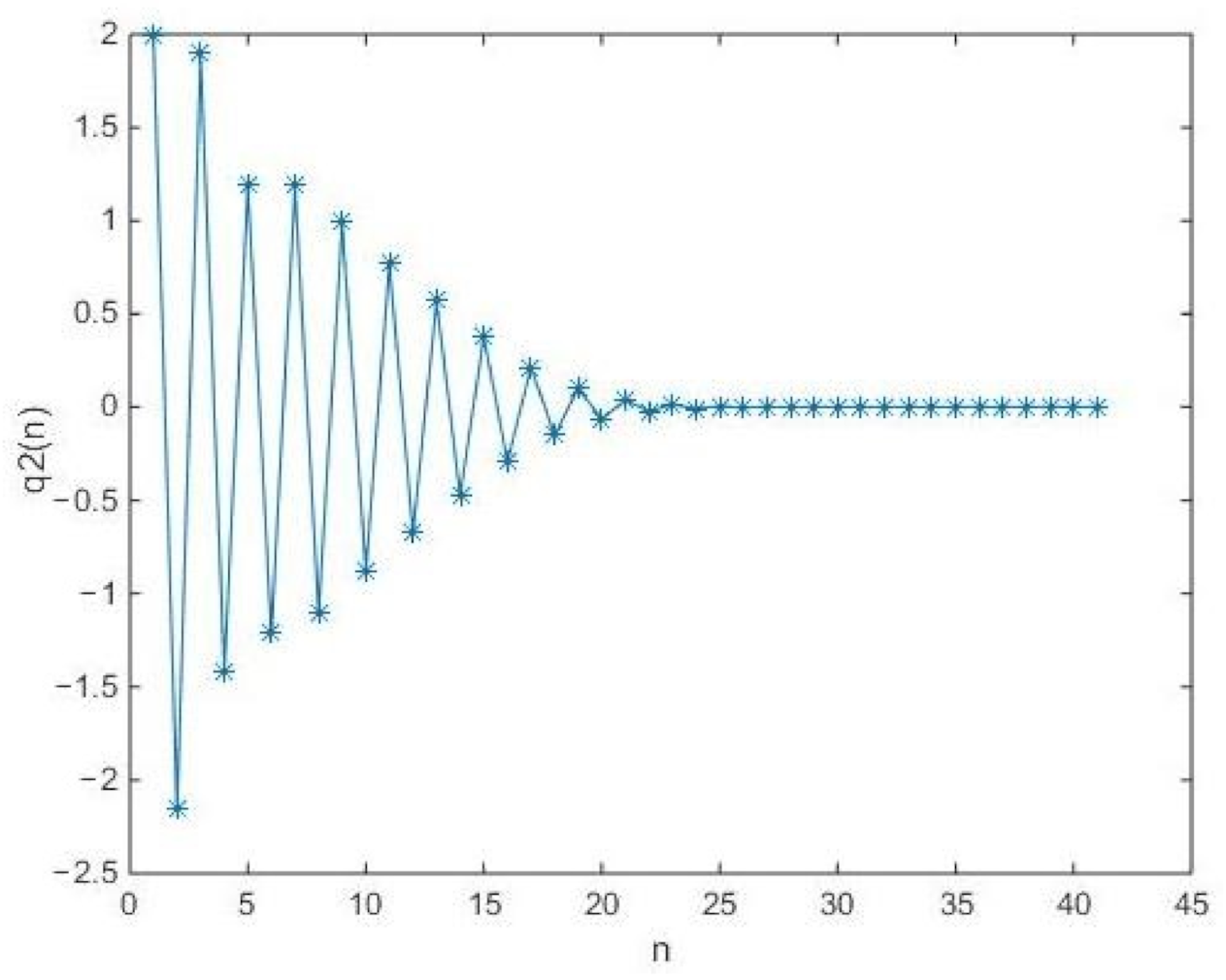
In what follows, we will provide two examples to support our obtained results of Theorem 8.
Example 1. In Equation (4), let , Example 2. In Equation (6), let , , , , 4. Conclusions
Anti-periodic phenomena always appear in various fields related to engineering science and technology. Almost anti-periodic phenomena is a natural extension of anti-periodic phenomena whose dynamical behavior can be reflected by almost anti-periodic process.
As an important tool of description of discrete process with almost anti-periodic circulation in the fields of engineering, biological chemistry, and neural computation, etc., a notion of discrete almost anti-periodic process has been proposed in this paper. Indeed, for an arbitrary almost anti-periodic sequence, the relatively dense set can also be applied to depict their accurate definitions. In the literature [
26], Wang et al. addressed some basic notions to introduce a series of notions of almost periodic process on different types of time scales; the most convenient and precise statement is to adopt an intersection of intervals and subsets of real lines to portray the relative density distributed on time scales. The set with such an intersection property is called a relatively dense set. Naturally, it can be also applied to precisely describe an almost anti-periodic process on time scales.
The relatively dense set of the time scale version is presented as follows:
Assume that is a time scale with periodicity, i.e., there is a nonempty set such that for all and . Now, a standard notion of relative density of a subset of could be introduced.
A subset S of is called a relatively dense set if and only if there is a positive number such that for each .
By using this basic notion, we can also address the notion of an almost anti-periodic process on time scales.
Let
be a
matrix-valued discrete function and
be a
N-dimensional vector-valued function; then, we define
If for
, there exists a positive integer
such that
is relatively dense. Then,
is called the almost anti-periodic discrete process, and
is called the
-almost anti-period of
. Similarly,
is an almost anti-periodic
matrix-valued function if
is relatively dense.
The results of this paper provide a new avenue to study almost the anti-periodic process on a discrete time case. Meanwhile, the definition mode of function adopted in the paper could be extended to combine continuous cases and other complex time variables. Their comprehensive definitions and properties based on more complicated time situations will be investigated in our future research.




{kind=link}
{kind=link}
{kind=link}
{kind=link}



