
An In-Pipe Inspection Robot with Permanent Magnets and Omnidirectional Wheels: Design and Implementation

 ,
,  ,
,
Abstract
:1. Introduction
2. Design Principle
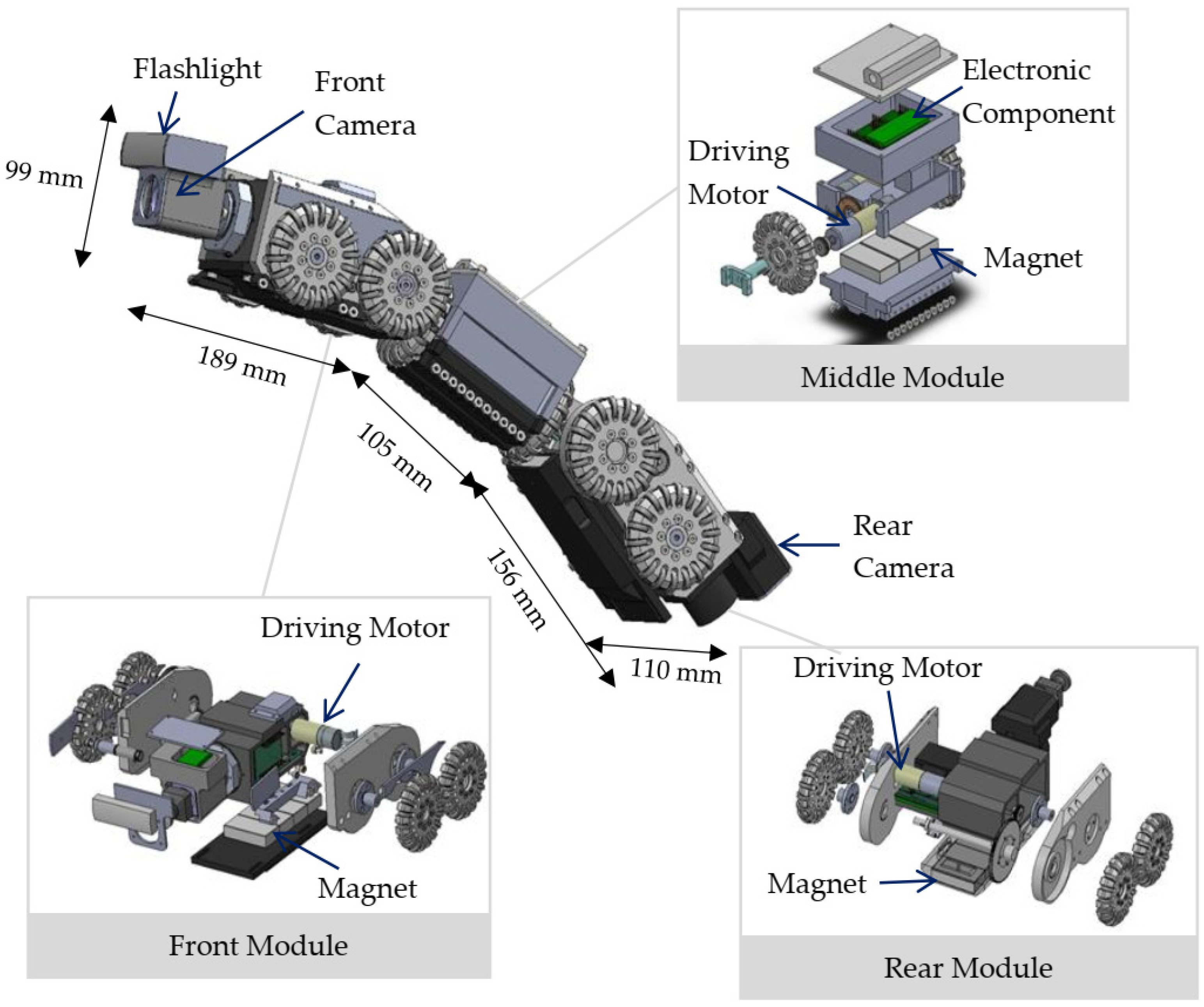
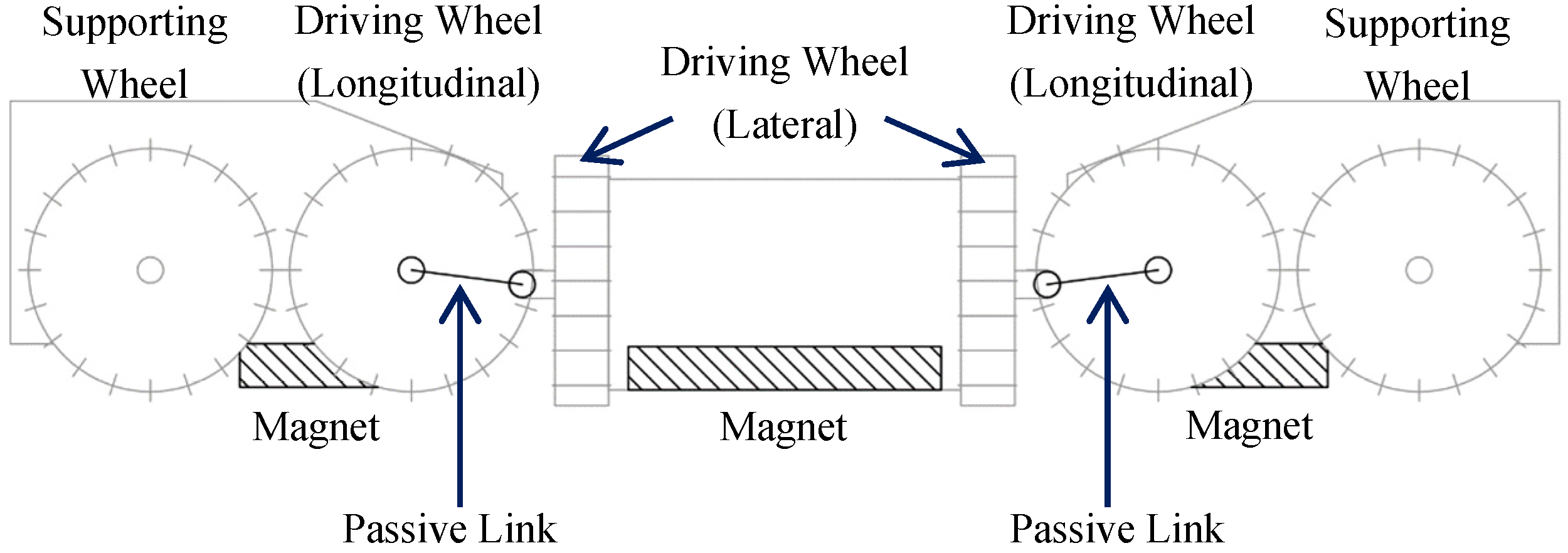
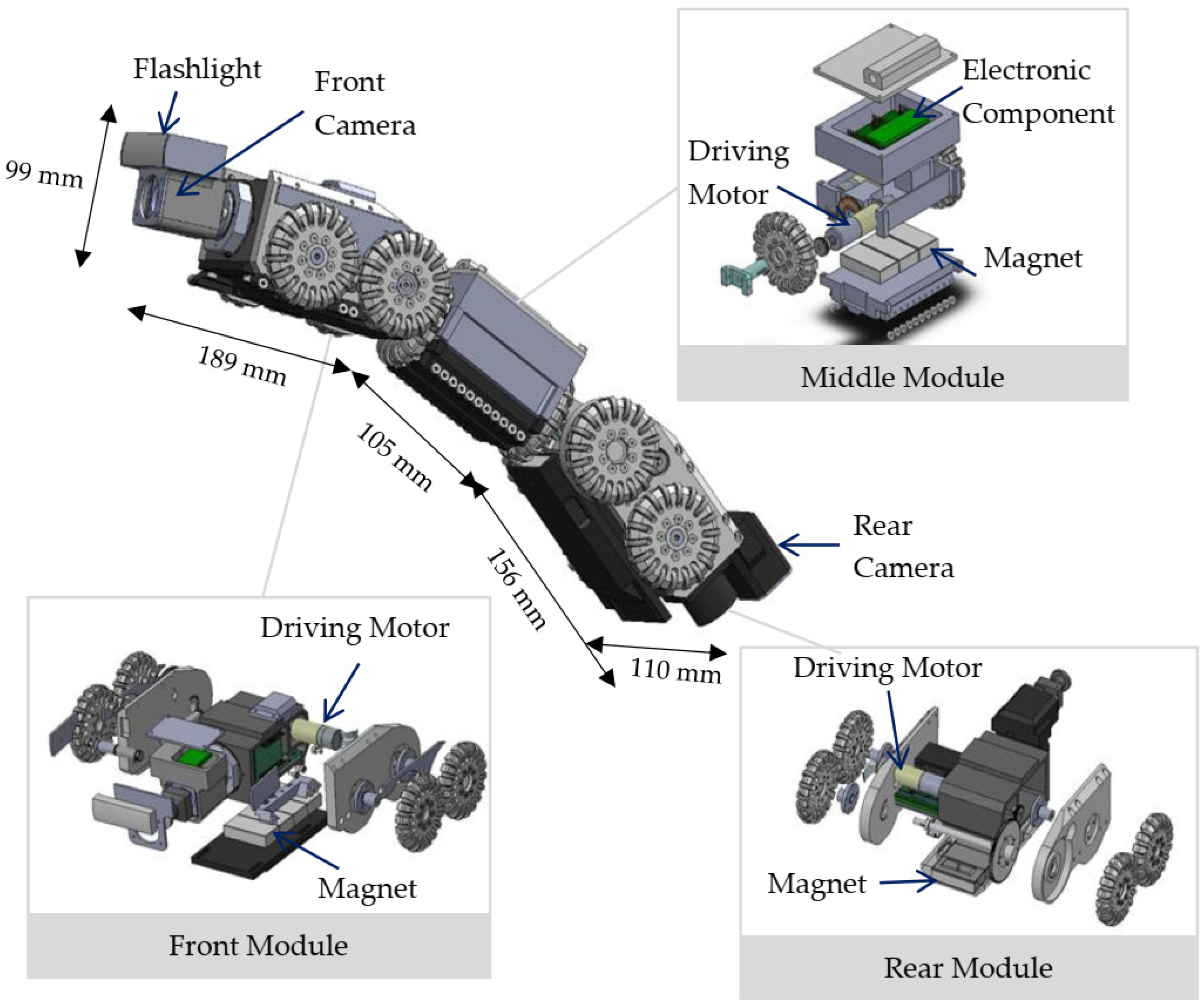
2.1. Mechanical Design and Materials
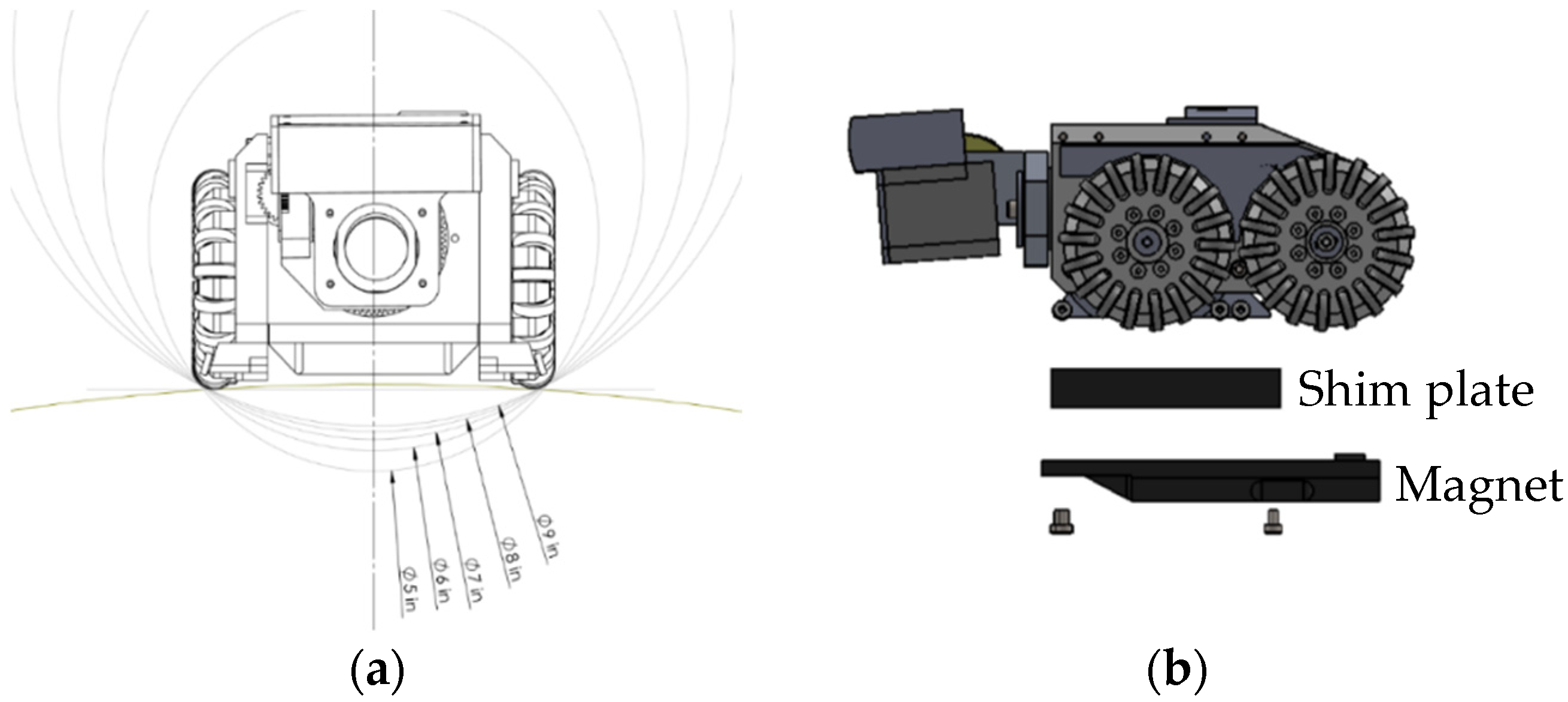
2.2. Shim Plate
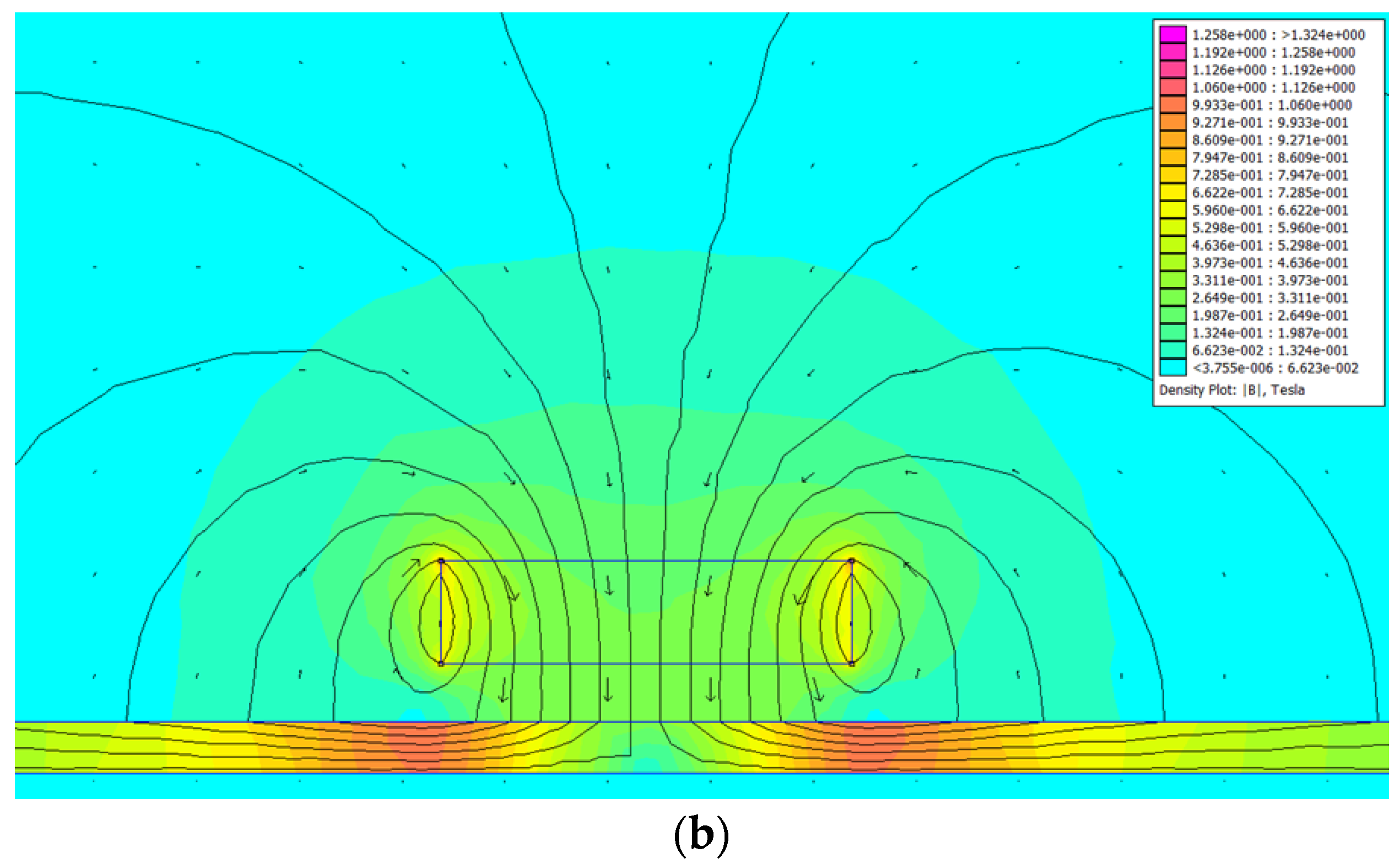
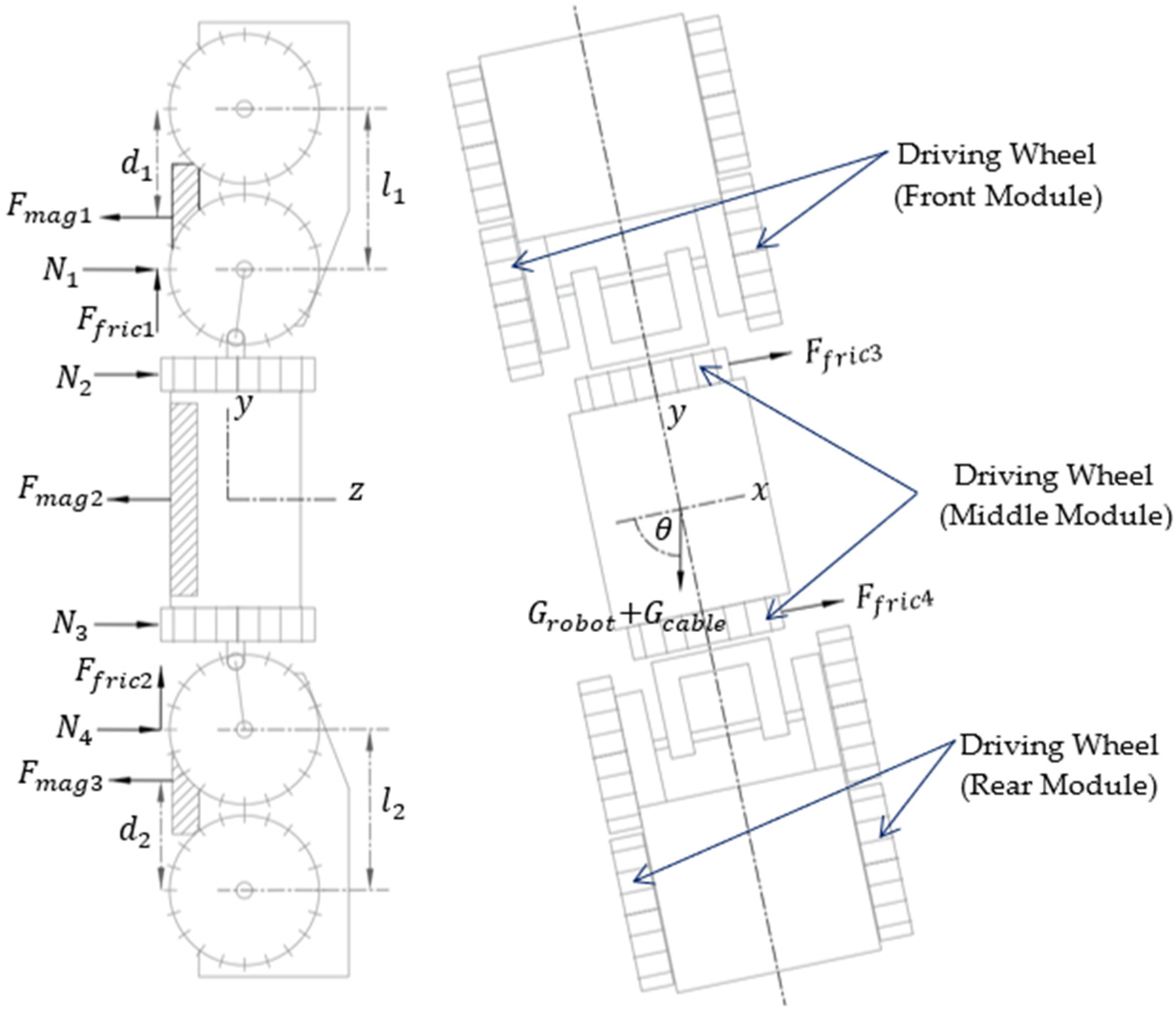
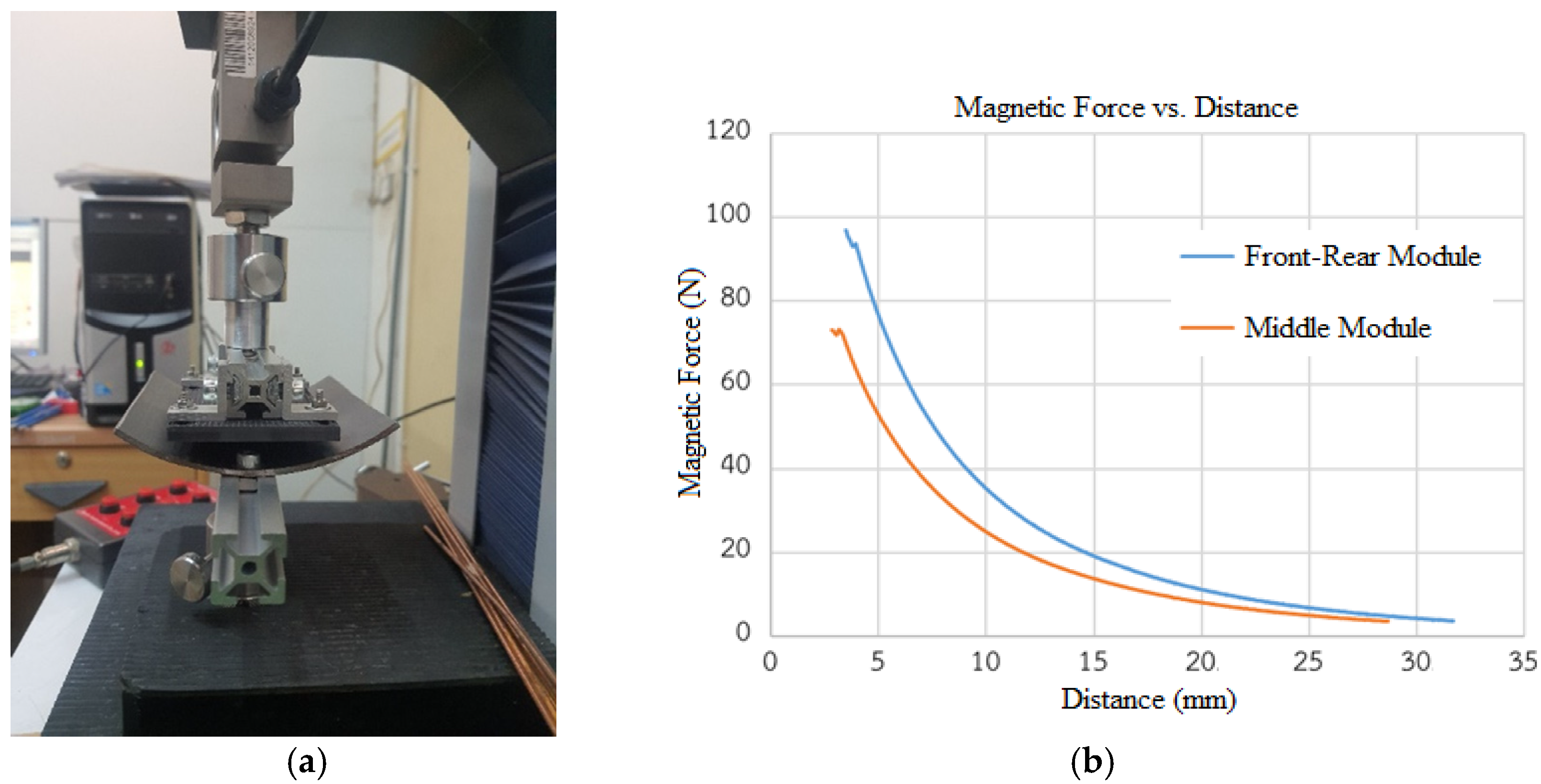
2.3. Magnetic Adhesive System
2.4. Motor Power
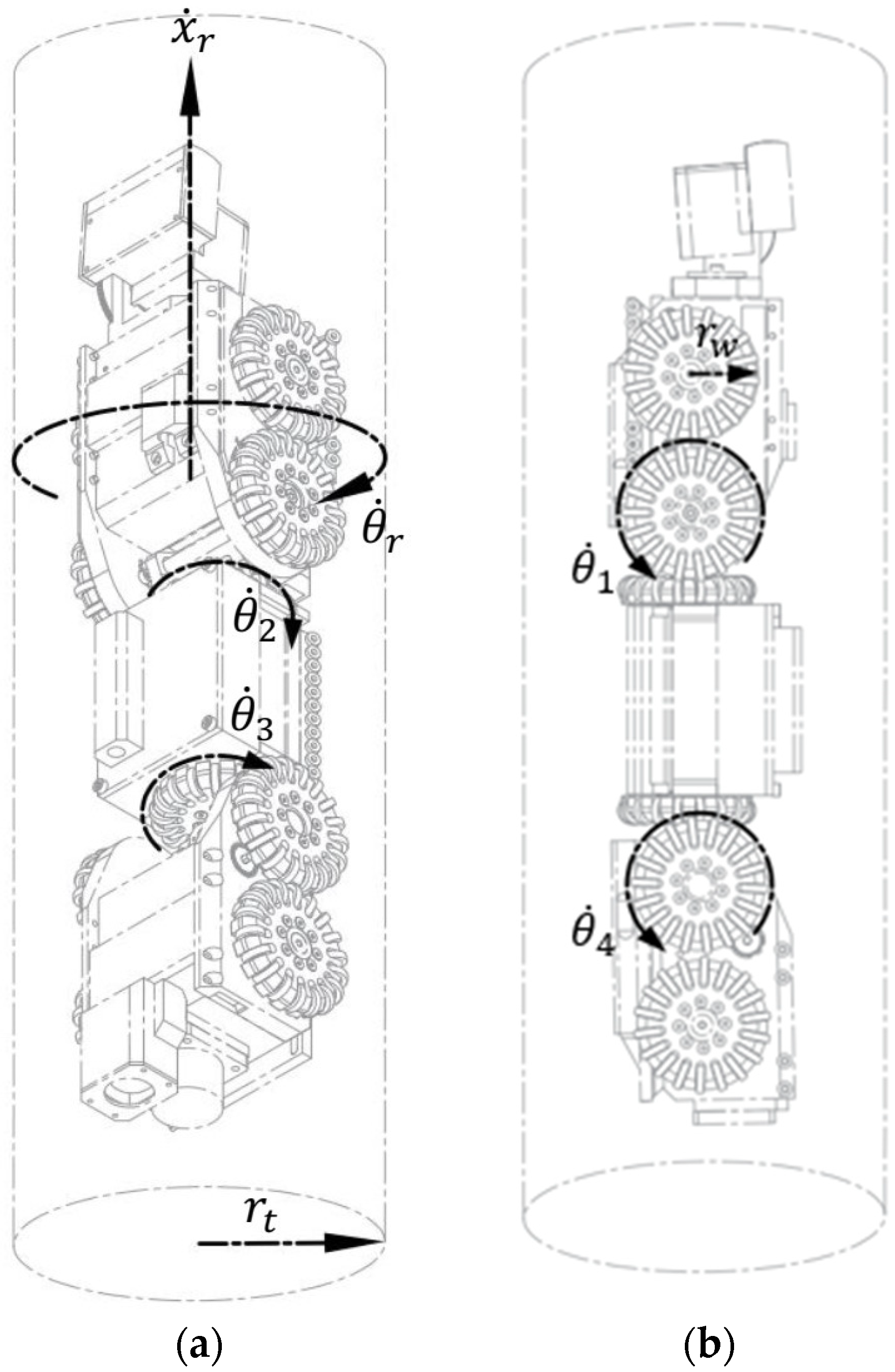
2.5. Kinematic Analysis
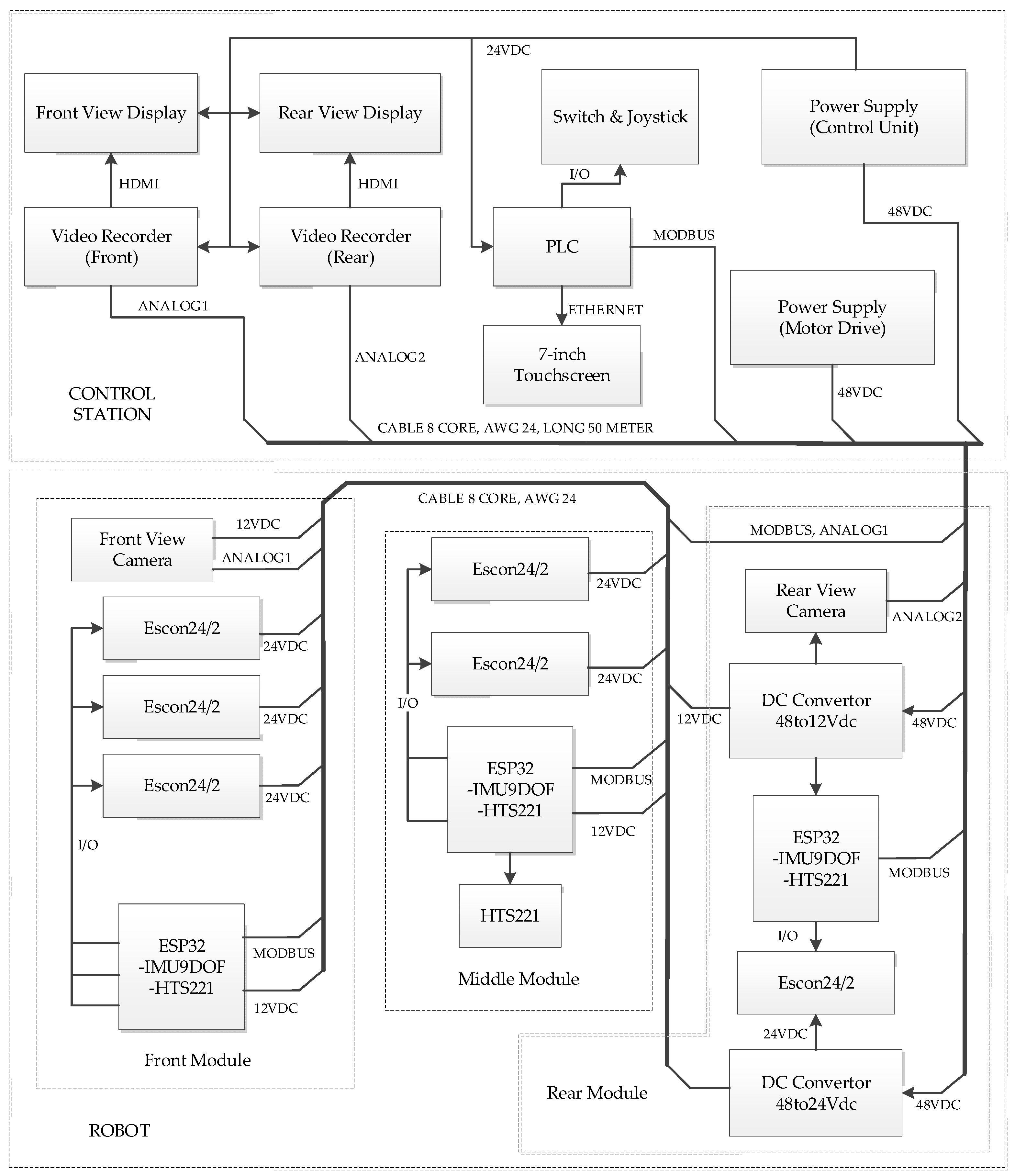
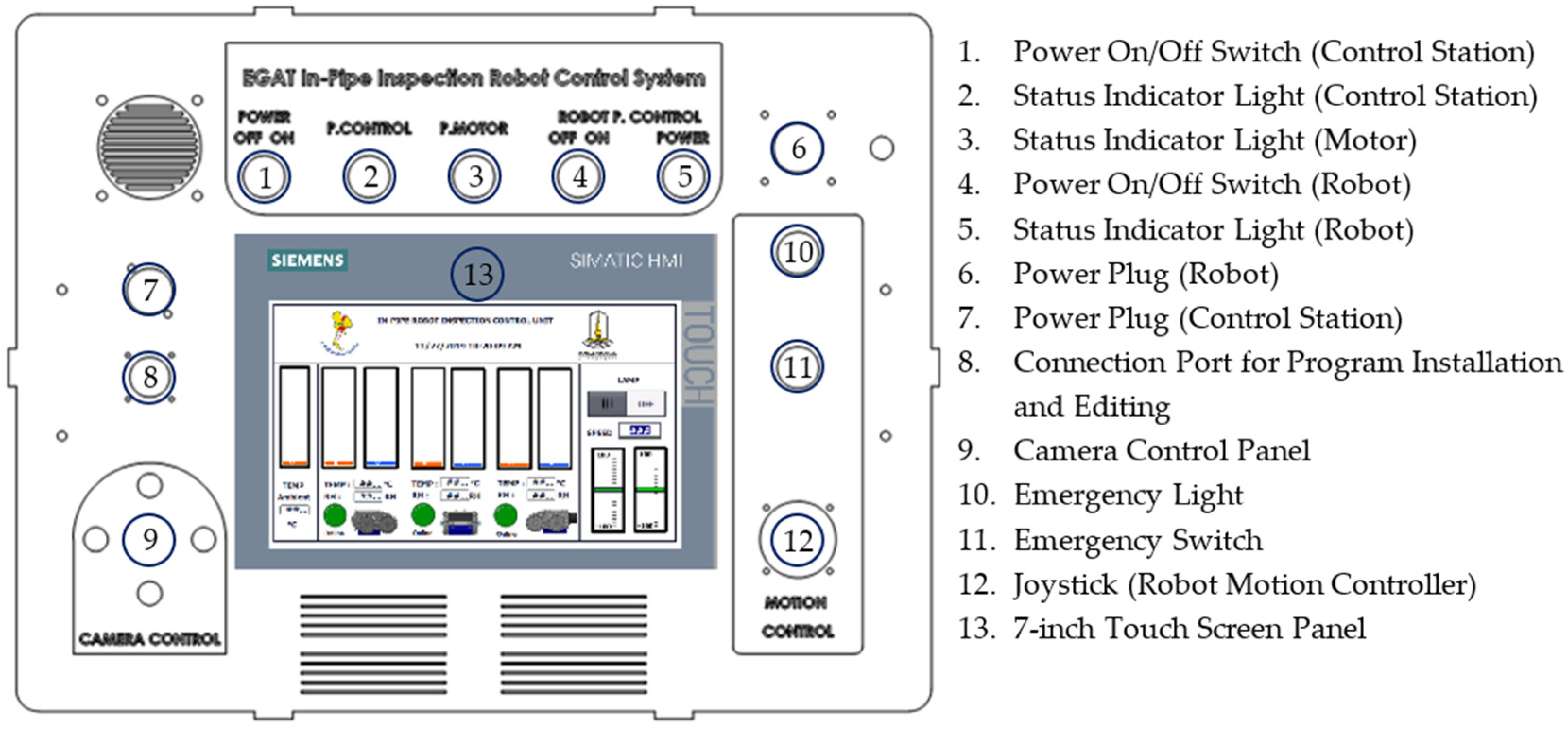
2.6. Electrical Systems
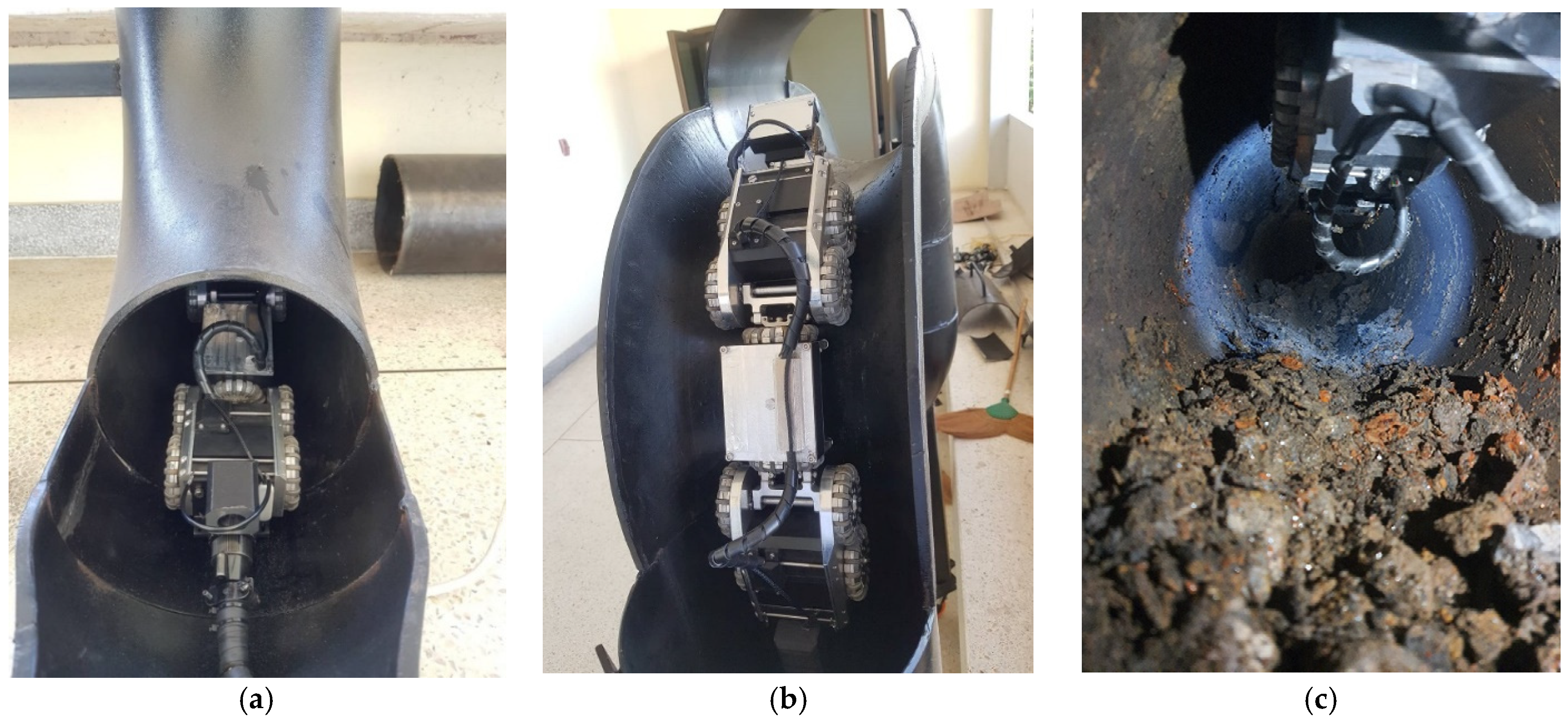
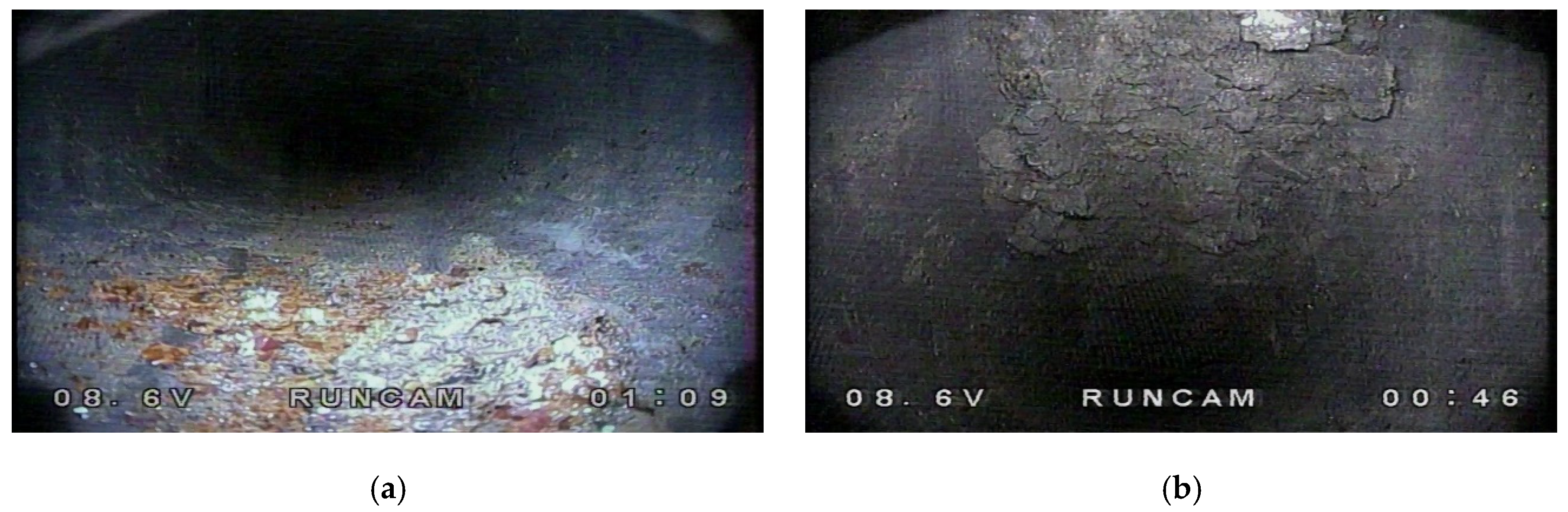
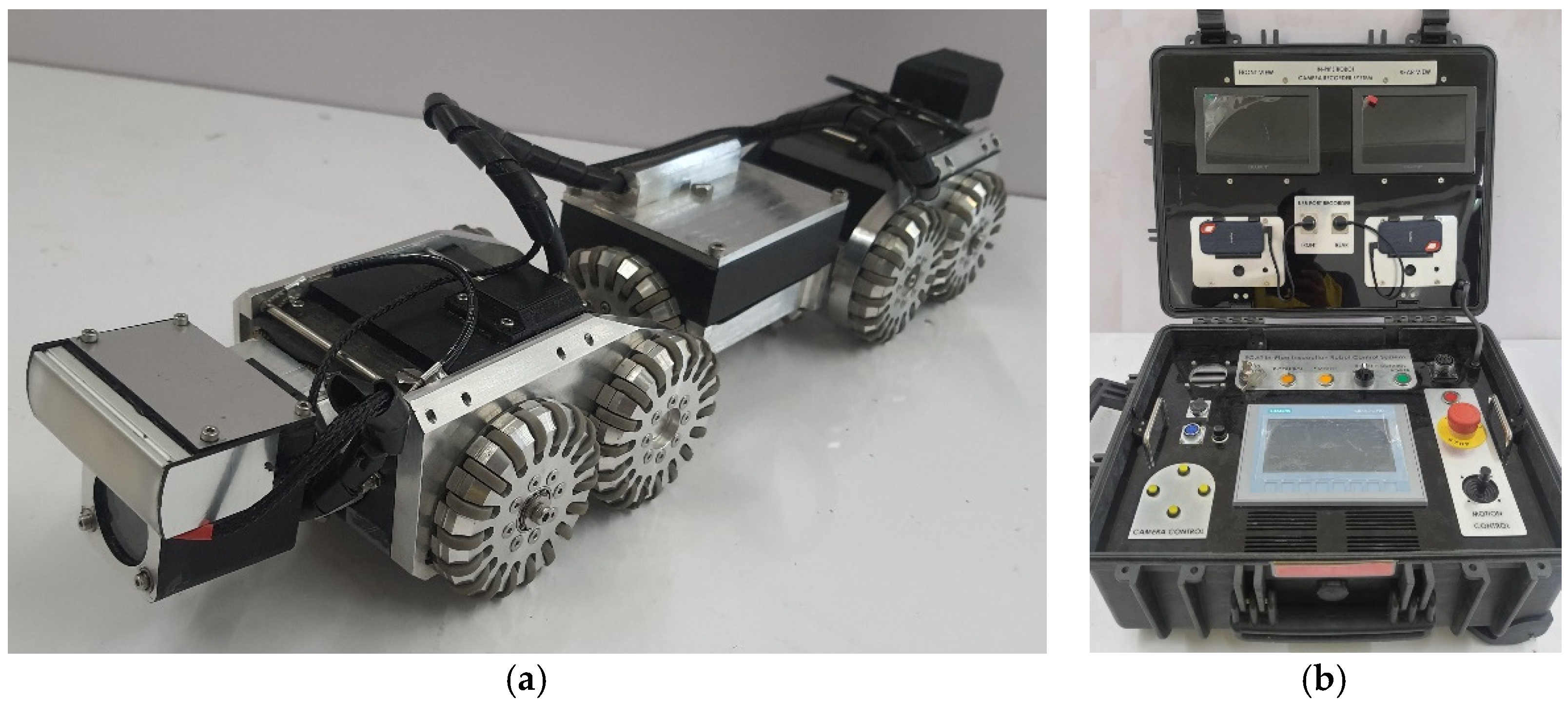
3. Prototype and Experiments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kirchner, F.; Hertzberg, J. A Prototype Study of an Autonomous Robot Platform for Sewerage System Maintenance. Auton. Robot. 1997, 4, 319–331. [Google Scholar] [CrossRef]
- Xu, Z.-L.; Lu, S.; Yang, J.; Feng, Y.-H.; Shen, C.-T. A wheel-type in-pipe robot for grinding weld beads. Adv. Manuf. 2017, 5, 182–190. [Google Scholar] [CrossRef]
- Hadi, A.; Abdollahi, M.; Alipour, K.; Tarvirdizadeh, B. Design and Prototyping a New Add-on Module to Increase Traction Force of a Wheeled Sewer Inspection Robot. In Proceedings of the 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017; pp. 254–259. [Google Scholar]
- Mohammed, M.N.; Nadarajah, V.S.; Lazim, N.F.M.; Zamani, N.S.; Al-Sanjary, O.I.; Ali, M.A.M.; Al-Youif, S. Design and Development of Pipeline Inspection Robot for Crack and Corrosion Detection. In Proceedings of the 2018 IEEE Conference on Systems, Process and Control (ICSPC), Malacca, Malaysia, 14–15 December 2018; pp. 29–32. [Google Scholar]
- Mills, G.H.; Jackson, A.E.; Richardson, R.C. Advances in the Inspection of Unpiggable Pipelines. Robotics 2017, 36. [Google Scholar] [CrossRef] [Green Version]
- Yaguchi, H.; Izumikawa, T. Wireless in-piping actuator capable of high-speed locomotion by a new motion principle. IEEE/ASME Trans. Mechatron. 2013, 18, 1367–1376. [Google Scholar] [CrossRef]
- Yang, J.; Xue, Y.; Shang, J.; Luo, Z. Research on a new bilateral self-locking mechanism for an inchworm micro in-pipe robot with large traction. Int. J. Adv. Robot. Syst. 2014, 11, 174. [Google Scholar] [CrossRef]
- Yum, Y.J.; Hwang, H.S.; Kelemen, M.; Maxim, V.; Frankovský, P. In-pipe micromachine locomotion via the inertial stepping principle. J. Mech. Sci. Technol. 2014, 28, 3237–3247. [Google Scholar] [CrossRef]
- Yim, S.; Jeon, D. Magnetic mechanical capsule robot for multiple locomotion mechanisms. Int. J. Control Autom. Syst. 2014, 12, 383–389. [Google Scholar] [CrossRef]
- Fang, D.; Shang, J.; Luo, Z.; Lv, P.; Wu, G. Development of a novel self-locking mechanism for continuous propulsion inchworm in-pipe robot. Adv. Mech. Eng. 2018, 10, 1687814017749402. [Google Scholar] [CrossRef] [Green Version]
- Suzumori, K.; Miyagawa, T.; Kimura, M.; Hasegawa, Y. Micro Inspection Robot for 1-in Pipes. IEEE/ASME Trans. Mechatron. 1999, 4, 286–292. [Google Scholar] [CrossRef]
- Roh, S.G.; Choi, H.R. Differential-drive in-pipe robot for moving inside urban gas pipelines. IEEE Trans. Robot. 2005, 21, 1–17. [Google Scholar] [CrossRef]
- Ciszewski, M.; Wacławski, M.; Buratowski, T.; Giergiel, M.; Kurc, K. Design, Modelling and Laboratory Testing of a Pipe Inspection Robot. Arch. Mech. Eng. 2015, 62, 395–407. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.M.; Choi, Y.S.; Lee, Y.G.; Choi, H.R. Novel mechanism for in-pipe robot based on a multiaxial differential gear mechanism. IEEE/ASME Trans. Mechatron. 2017, 22, 227–235. [Google Scholar] [CrossRef]
- Zhang, Y.; Yan, G. In-pipe inspection robot with active pipe-diameter adaptability and automatic tractive force adjusting. Mech. Mach. Theory 2007, 42, 1618–1631. [Google Scholar] [CrossRef]
- Roh, S.G.; Kim, D.W.; Lee, J.S.; Moon, H.; Choi, H.R. In-pipe robot based on selective drive mechanism. Int. J. Control Autom. Syst. 2009, 7, 105–112. [Google Scholar] [CrossRef]
- Kuwada, A.; Tsujino, K.; Suzumori, K.; Kanda, T. Intelligent Actuators Realizing Snake-like Small Robot for Pipe Inspection. In Proceedings of the 2006 IEEE International Symposium on MicroNanoMechanical and Human Science, Nagoya, Japan, 5–8 November 2006; pp. 1–6. [Google Scholar]
- Fjerdingen, S.A.; Liljebäck, P.; Transeth, A.A. A snake-like robot for internal inspection of complex pipe structures (PIKo). In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MA, USA, 10–15 October 2009; pp. 5665–5671. [Google Scholar]
- Schoeneich, P.; Rochat, F.; Nguyen, O.T.; Caprari, G.; Moser, R.; Bleuler, H.; Mondada, F. Tubulo—A train-like miniature inspection climbing robot for ferromagnetic tubes. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010; pp. 1–5. [Google Scholar]
- Jeon, W.; Park, J.; Kim, I. Development of high mobility in-pipe inspection robot. In Proceedings of the System Integration (SII), 2011 IEEE/SICE International Symposium on, Kyoto, Japan, 20–22 December 2011; pp. 479–484. [Google Scholar]
- Takayama, T.; Takeshima, H.; Hori, T.; Omata, T. A Twisted Bundled Tube Locomotive Device Proposed for In-Pipe Mobile Robot. IEEE/ASME Trans. Mechatron. 2015, 20, 2915–2923. [Google Scholar] [CrossRef]
- Oka, Y.; Kakogawa, A.; Ma, S. Stopper Angle Design for a Multi-link Articulated Wheeled In-pipe Robot with Underactuated Twisting Joints. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 973–978. [Google Scholar]
- Tâche, F.; Pomerleau, F.; Fischer, W.; Caprari, G.; Mondada, F.; Moser, R.; Siegwart, R. MagneBike: Compact magnetic wheeled robot for power plant inspection. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010; pp. 1–2. [Google Scholar] [CrossRef] [Green Version]
- Abdul Jalal, M.F.; Mohamed Sahari, K.S.; Anuar, A. Development of magnetic wheeled boiler tube inspection robot. J. Teknol. 2015, 76, 19–23. [Google Scholar] [CrossRef] [Green Version]
- Azlin, A.; Sahari, K.; Abdul Jalal, M.F.; Anuar, A. Development of 1-inch boiler tube inspection robot. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 004340–004344. [Google Scholar]
- Mills, G.H.; Liu, J.H.W.; Kaddouh, B.; Jackson, A.E.; Richardson, R.C. Miniature Magnetic Robots For In-Pipe Locomotion. In Proceedings of the 21st International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Panama, Panama, 10–12 September 2018. [Google Scholar]
- Kawaguchi, Y.; Yoshida, I.; Kurumatani, T.; Kikuta, T.; Yamada, Y. Internal pipe inspection robot. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 1, pp. 857–862. [Google Scholar] [CrossRef]
- Boonyaprapasorn, A.; Thung-Od, K.; Silapunt, R.; Maneewarn, T. Studies of total adhesive force of multiple magnetic wheels for a climbing robot. In Proceedings of the 16th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR), Sydney, Australia, 14–17 July 2013; pp. 578–584. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipe Diameter (in) | 5 | 6 | 7 | 8 | 9 | 10 | 11 | Flat Plate |
|---|---|---|---|---|---|---|---|---|
| Shim Plate Thickness (mm) | 18 | 14 | 12 | 10 | 9 | 8 | 7 | 1 |
| Power (W) | Speed (rpm) | Torque (Nm) | |
|---|---|---|---|
| Calculated results of motor requirements | 31 | 37,836 | 0.0078 |
| Maxon’s EC16 motor with GP16A gearhead specifications | 30 | 38,100 | 0.0083 |
| Parameters | Value |
|---|---|
| Material | Aluminum, nylon, and PLA |
| Dimension | 110 mm × 99 mm × 450 mm |
| Weight | 3 kg |
| Magnet | Neodymium block 40 × 20 × 10 mm N35 |
| Wheel diameter | 10 cm |
| Power | 220 V 50 Hz |
| Top speed | 30 cm/s |
| Working space | In-steel pipe, from 5-inch (127 mm) diameter to flat plate |
| Payload | 59 N |
| Vertical distance | 10 m |
| Control cable length | 50 m |
| Motor | Maxon EC16 30-watt brushless DC motor |
| Motor gear | GP16A ratio 104:1 |
| Robot gear | Spur gear ratio 4:1 |
| Analog camera | FOV 160° 1000TVL |
| Camera display | 7 inches |
| Sensors | 3 humidity sensors and 4 temperature sensors |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thung-Od, K.; Kanjanawanishkul, K.; Maneewarn, T.; Sethaput, T.; Boonyaprapasorn, A. An In-Pipe Inspection Robot with Permanent Magnets and Omnidirectional Wheels: Design and Implementation. Appl. Sci. 2022, 12, 1226. https://doi.org/10.3390/app12031226
Thung-Od K, Kanjanawanishkul K, Maneewarn T, Sethaput T, Boonyaprapasorn A. An In-Pipe Inspection Robot with Permanent Magnets and Omnidirectional Wheels: Design and Implementation. Applied Sciences. 2022; 12(3):1226. https://doi.org/10.3390/app12031226
Chicago/Turabian StyleThung-Od, Kaned, Kiattisin Kanjanawanishkul, Thavida Maneewarn, Thunyaseth Sethaput, and Arsit Boonyaprapasorn. 2022. "An In-Pipe Inspection Robot with Permanent Magnets and Omnidirectional Wheels: Design and Implementation" Applied Sciences 12, no. 3: 1226. https://doi.org/10.3390/app12031226
APA StyleThung-Od, K., Kanjanawanishkul, K., Maneewarn, T., Sethaput, T., & Boonyaprapasorn, A. (2022). An In-Pipe Inspection Robot with Permanent Magnets and Omnidirectional Wheels: Design and Implementation. Applied Sciences, 12(3), 1226. https://doi.org/10.3390/app12031226