
Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles

 ,
, 
 ,
,  ,
,  , ,
, , 
Abstract
:1. Introduction
- Providing simulation-based solution to the problem highlighted by authors in [12] of multiple factor analysis.
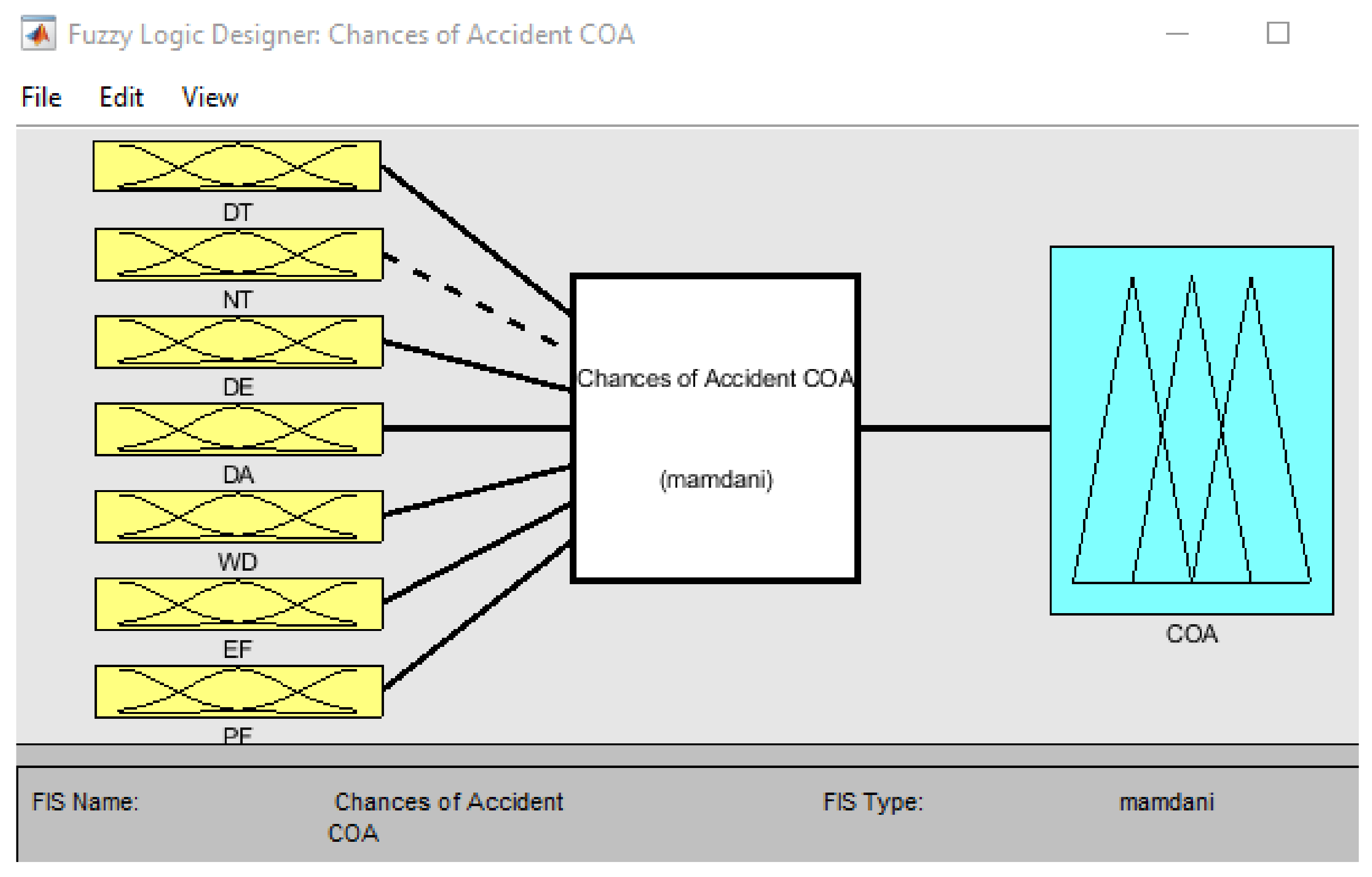
- Use of the Mamdani Fuzzy Inference system to compute the values of factors involved in collisions.
- Highlighting the combination of leading factors involved in rear-end collision.
- The combination of these factors has never been used before for collision avoidance using a Fuzzy system.
- The proposed model can assist drivers during different conditions by switching the control to the vehicle. The simulation will show the switching of control in the simulation section.
2. Related Work
3. Proposed Methodology
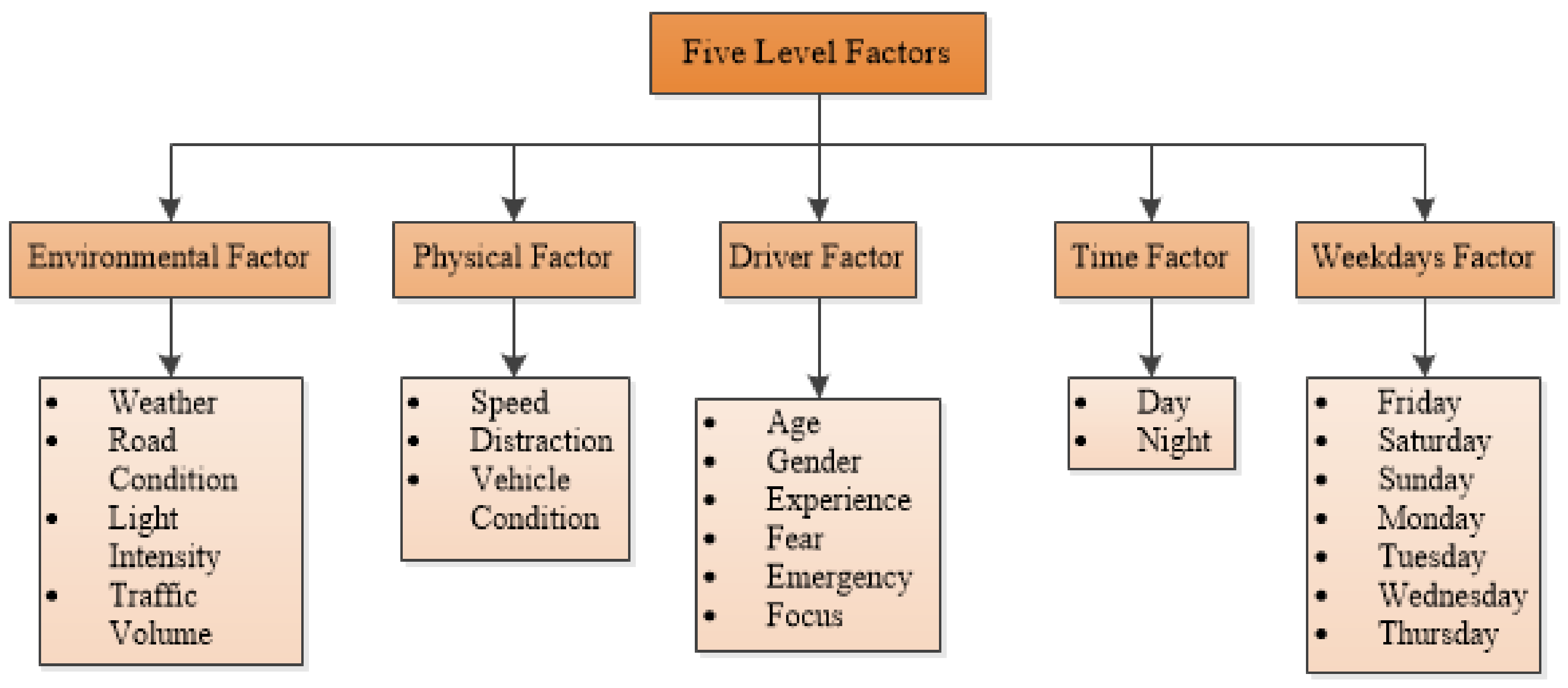
3.1. Five Factors Description
3.1.1. Environmental Factors
3.1.2. Physical Factors
3.1.3. Driver Factor
3.1.4. Time Factor
3.1.5. Weekdays Factor
4. Proposed Algorithm
| Algorithm 1: Control Structure for transferring vehicle control to and from vehilce |
| Do{ |
| CD->GetSensorValues(); |
| Data = Fuzzification (CD);//calculate the current situation of each category |
| Result = MFBRECAS (Data)//combined/integrated result of every category and factors |
| If (Result==chances of accidents) |
| Control_brak() //Take control of the driver. |
| If (EF is high) |
| Control_speed_generate_alert(); |
| PY_F=result of physical factor obtained from Data variable |
| If (PY_F is high) |
| Control_Speed() |
| DF=result of Day factor obtained from Data variable |
| If (MF is high) |
| Control_speed_send_message(); |
| Control_Speed();//control_speed() will be called within this fucntion |
| DF=result of driver factors obtained from Data variable |
| If (DF is high) |
| Control_brak() |
| T_O_A=result of time factor obtained from Data variable |
| If (T_O_A is high) |
| { |
| Apply Brakes () |
| Control Speed () |
| } |
| Else |
| Control_back_to_driver() |
| End if |
| } |
| While (1); |
5. Experiments
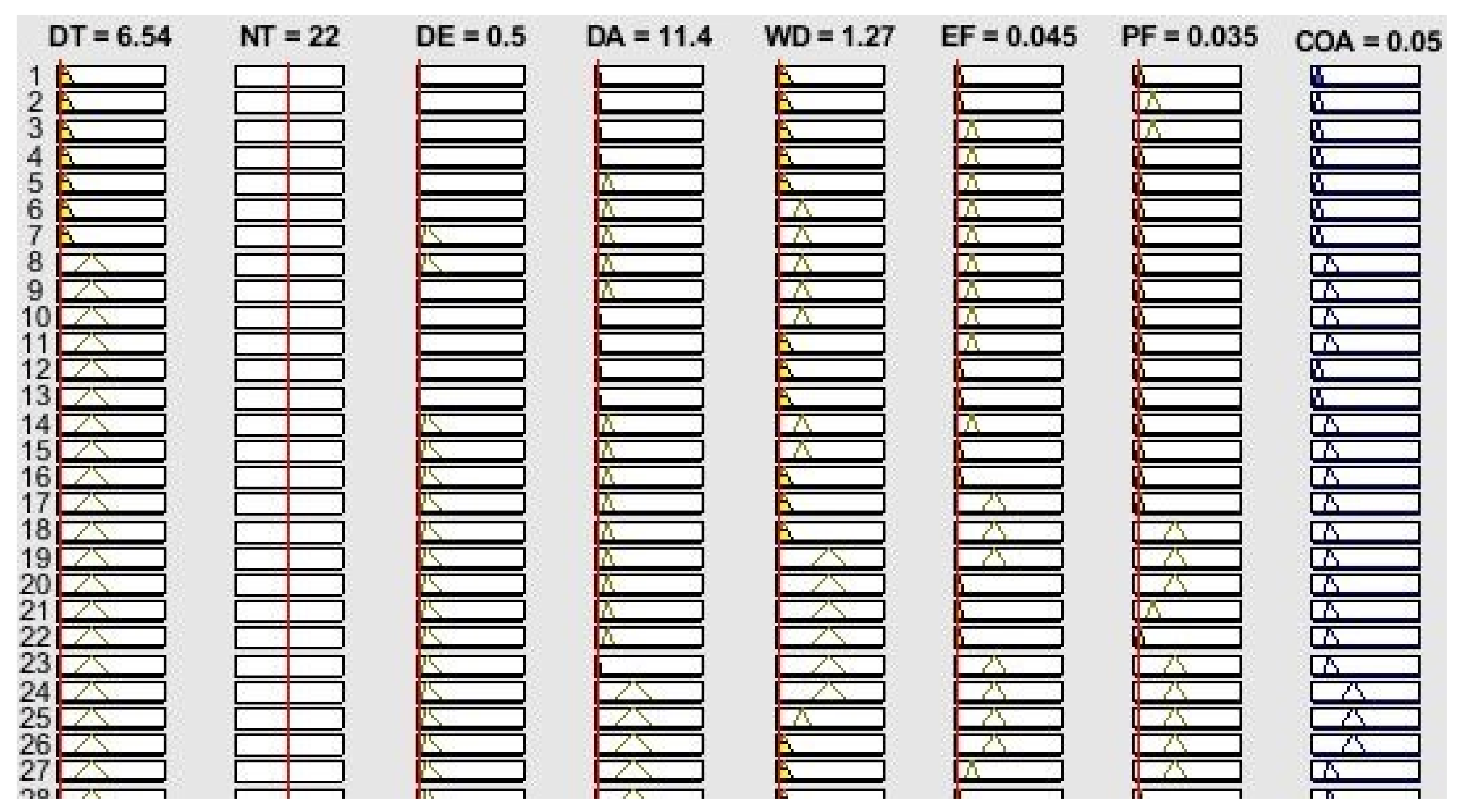
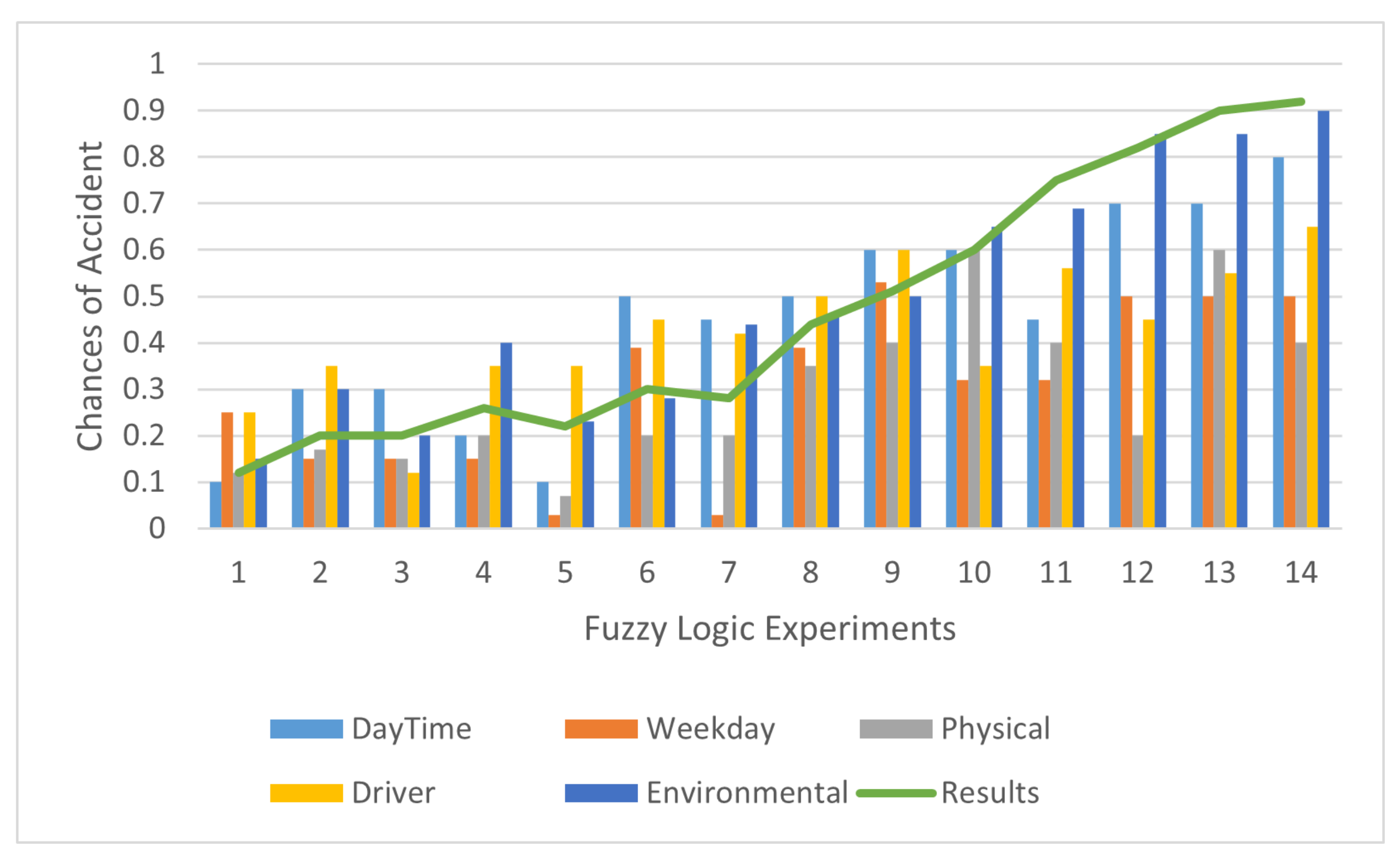
5.1. Fuzzy-Logic Based Experiments
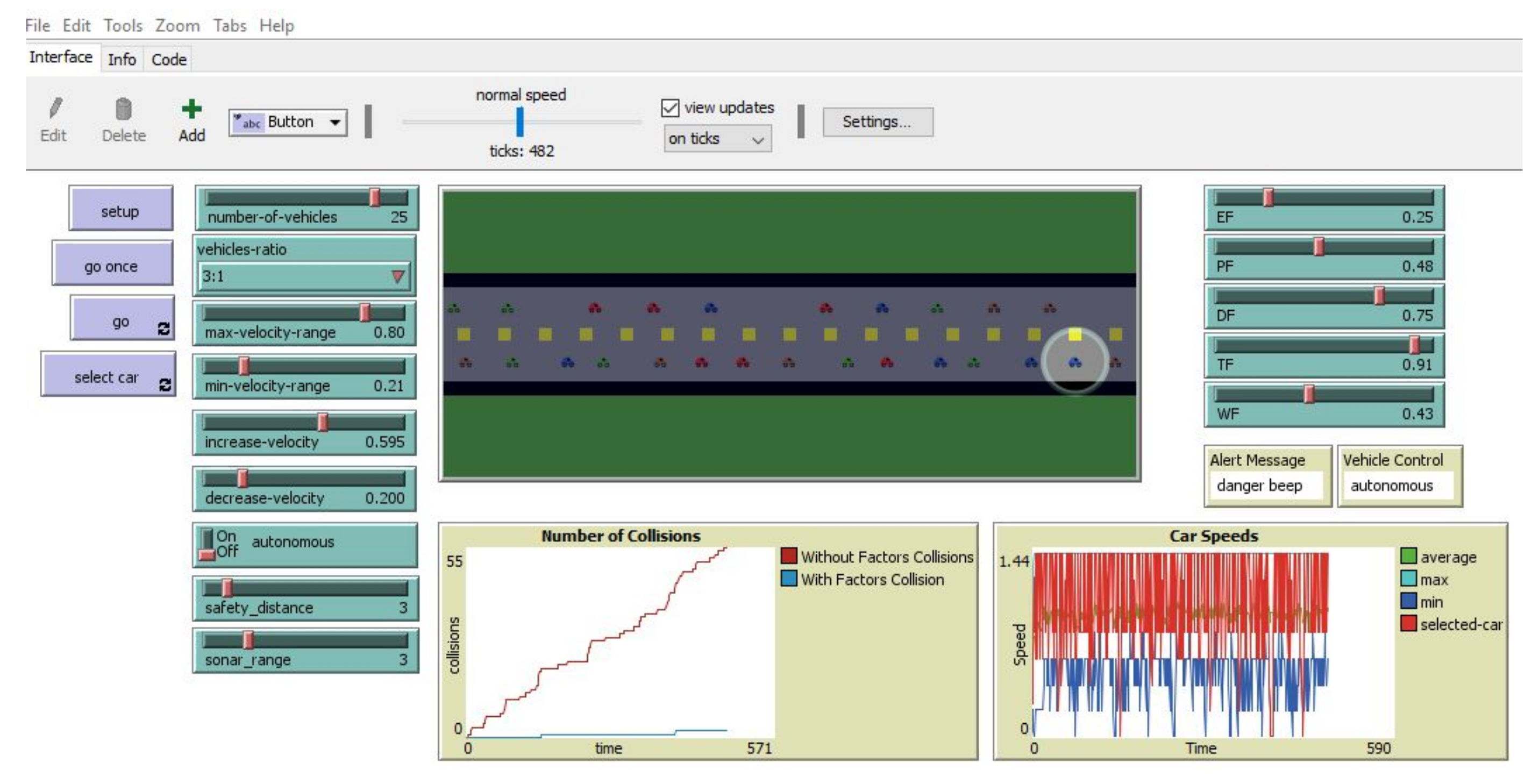
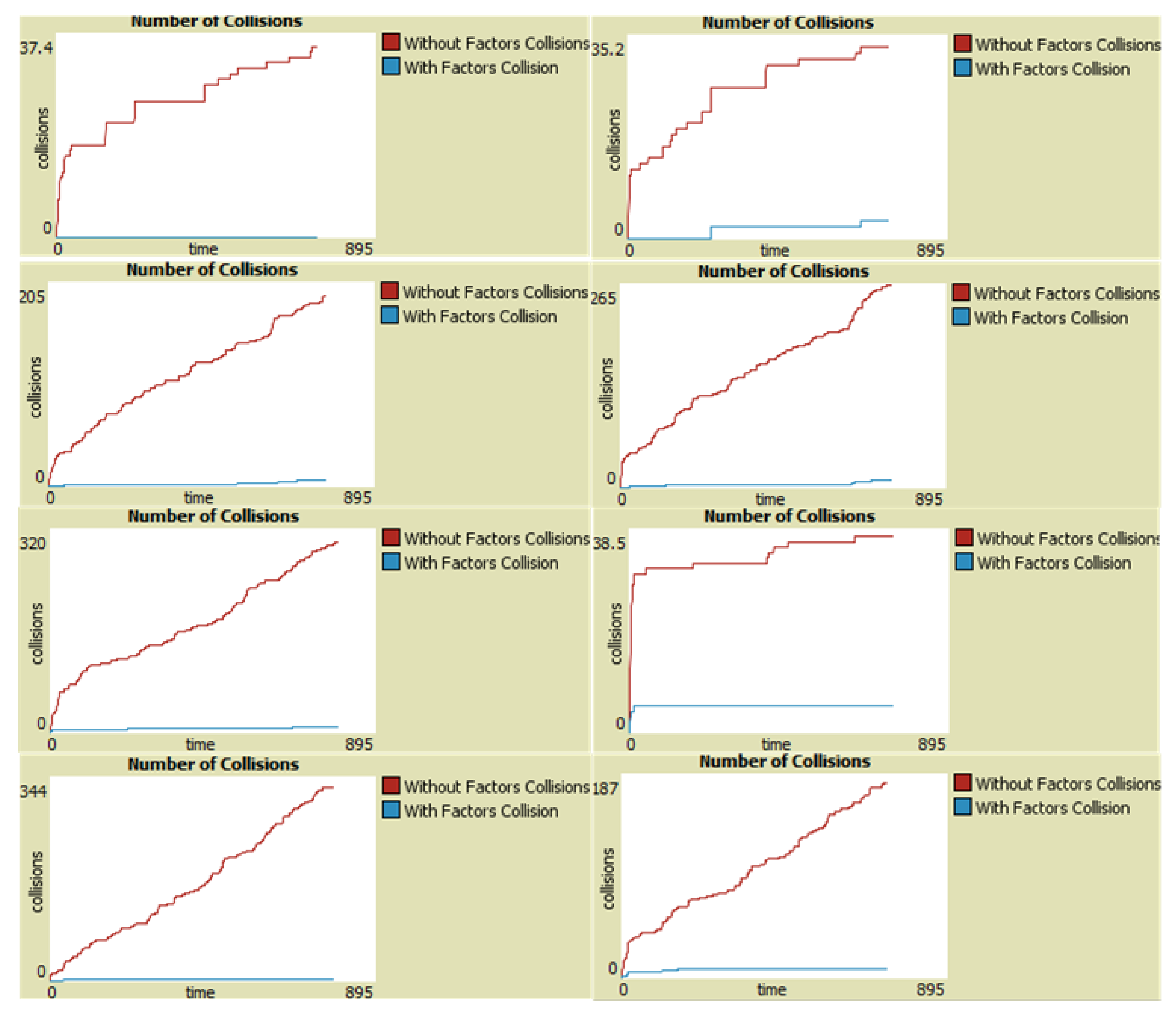
5.2. Simulation-Based Experiments
6. Results
7. Discussion
Limitations
8. Conclusions
8.1. Future Work
8.2. Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018: Summary; Technical Report; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Meng, Q.; Qu, X. Estimation of rear-end vehicle crash frequencies in urban road tunnels. Accid. Anal. Prev. 2012, 48, 254–263. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zhang, G.; Tarefder, R.; Ma, J.; Wei, H.; Guan, H. A multinomial logit model-Bayesian network hybrid approach for driver injury severity analyses in rear-end crashes. Accid. Anal. Prev. 2015, 80, 76–88. [Google Scholar] [CrossRef]
- Moon, S.; Moon, I.; Yi, K. Design, tuning, and evaluation of a full-range adaptive cruise control system with collision avoidance. Control Eng. Pract. 2009, 17, 442–455. [Google Scholar] [CrossRef]
- Van Den Berg, J.; Wilkie, D.; Guy, S.J.; Niethammer, M.; Manocha, D. LQG-obstacles: Feedback control with collision avoidance for mobile robots with motion and sensing uncertainty. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 346–353. [Google Scholar]
- Chen, C.; Li, M.; Sui, J.; Wei, K.; Pei, Q. A genetic algorithm-optimized fuzzy logic controller to avoid rear-end collisions. J. Adv. Transp. 2016, 50, 1735–1753. [Google Scholar] [CrossRef]
- Tron, E.; Margaliot, M. Mathematical modeling of observed natural behavior: A fuzzy logic approach. Fuzzy Sets Syst. 2004, 146, 437–450. [Google Scholar] [CrossRef]
- Razzaq, S.; Riaz, F.; Mehmood, T.; Ratyal, N.I. Multi-factors based road accident prevention system. In Proceedings of the 2016 International Conference on Computing, Electronic and Electrical Engineering (ICE Cube), Quetta, Pakistan, 11–12 April 2016; pp. 190–195. [Google Scholar]
- Malin, F.; Norros, I.; Innamaa, S. Accident risk of road and weather conditions on different road types. Accid. Anal. Prev. 2019, 122, 181–188. [Google Scholar] [CrossRef]
- Shangguan, Q.; Fu, T.; Liu, S. Investigating rear-end collision avoidance behavior under varied foggy weather conditions: A study using advanced driving simulator and survival analysis. Accid. Anal. Prev. 2020, 139, 105499. [Google Scholar] [CrossRef]
- Zhang, Y.; Du, F.; Wang, J.; Ke, L.; Wang, M.; Hu, Y.; Yu, M.; Li, G.; Zhan, A. A Safety Collision Avoidance Algorithm Based on Comprehensive Characteristics. Complexity 2020, 2020, 1616420. [Google Scholar] [CrossRef] [Green Version]
- Ashraf, I.; Hur, S.; Shafiq, M.; Park, Y. Catastrophic factors involved in road accidents: Underlying causes and descriptive analysis. PLoS ONE 2019, 14, e0223473. [Google Scholar] [CrossRef] [Green Version]
- Czubenko, M.; Kowalczuk, Z.; Ordys, A. Autonomous driver based on an intelligent system of decision-making. Cogn. Comput. 2015, 7, 569–581. [Google Scholar] [CrossRef] [Green Version]
- Sharma, A.; Zheng, Z.; Bhaskar, A.; Haque, M.M. Modelling car-following behaviour of connected vehicles with a focus on driver compliance. Transp. Res. Part B Methodol. 2019, 126, 256–279. [Google Scholar] [CrossRef]
- Córdoba, A.; Astrain, J.J.; Villadangos, J.; Azpilicueta, L.; López-Iturri, P.; Aguirre, E.; Falcone, F. Sestocross: Semantic expert system to manage single-lane road crossing. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1221–1233. [Google Scholar] [CrossRef]
- Abdulshaheed, H.R.; Yaseen, Z.T.; Salman, A.M.; Al_Barazanchi, I. A survey on the use of wimax and wi-fi on vehicular ad-hoc networks (vanets). In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; p. 012122. [Google Scholar]
- Chen, K.P.; Hsiung, P.A. Vehicle collision prediction under reduced visibility conditions. Sensors 2018, 18, 3026. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, W.; Wan, B.; Qu, X. A forward collision warning system using driving intention recognition of the front vehicle and V2V communication. IEEE Access 2020, 8, 11268–11278. [Google Scholar] [CrossRef]
- Yan, X.; Xue, Q.; Ma, L.; Xu, Y. Driving-simulator-based test on the effectiveness of auditory red-light running vehicle warning system based on time-to-collision sensor. Sensors 2014, 14, 3631–3651. [Google Scholar] [CrossRef]
- Regev, S.; Rolison, J.J.; Moutari, S. Crash risk by driver age, gender, and time of day using a new exposure methodology. J. Saf. Res. 2018, 66, 131–140. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, G.; Li, Y.; Ullah, S.; Zhuang, W.; Wang, J.; Zhang, N.; Geng, K. Self-learning control for coordinated collision avoidance of automated vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1149–1163. [Google Scholar] [CrossRef]
- Flanagan, S.K.; He, J.; Peng, X.H. Improving emergency collision avoidance with vehicle to vehicle communications. In Proceedings of the 2018 IEEE 20th International Conference on High Performance Computing and Communications; IEEE 16th International Conference on Smart City; IEEE 4th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Exeter, UK, 28–30 June 2018; pp. 1322–1329. [Google Scholar]
- Fauadi, H.F.; Nordin, M.H.; Zainon, Z.M. Frontal obstacle avoidance of an autonomous subsurface vehicle (ASV) using fuzzy logic method. In Proceedings of the 2007 International Conference on Intelligent and Advanced Systems, Kuala Lumpur, Malaysia, 25–28 November 2007; pp. 125–128. [Google Scholar]
- David, K.K.A.; Vicerra, R.R.; Bandala, A.A.; Lim, L.A.G.; Dadios, E.P. Unmanned underwater vehicle navigation and collision avoidance using fuzzy logic. In Proceedings of the 2013 IEEE/SICE International Symposium on System Integration, Kobe, Japan, 15–17 December 2013; pp. 126–131. [Google Scholar]
- Gicquel, L.; Ordonneau, P.; Blot, E.; Toillon, C.; Ingrand, P.; Romo, L. Description of various factors contributing to traffic accidents in youth and measures proposed to alleviate recurrence. Front. Psychiatry 2017, 8, 94. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riaz, F.; Jabbar, S.; Sajid, M.; Ahmad, M.; Naseer, K.; Ali, N. A collision avoidance scheme for autonomous vehicles inspired by human social norms. Comput. Electr. Eng. 2018, 69, 690–704. [Google Scholar] [CrossRef]
- Xiong, X.; Wang, M.; Cai, Y.; Chen, L.; Farah, H.; Hagenzieker, M. A forward collision avoidance algorithm based on driver braking behavior. Accid. Anal. Prev. 2019, 129, 30–43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, C.; Xiang, H.; Qiu, T.; Wang, C.; Zhou, Y.; Chang, V. A rear-end collision prediction scheme based on deep learning in the Internet of Vehicles. J. Parallel Distrib. Comput. 2018, 117, 192–204. [Google Scholar] [CrossRef]
- Jiménez, F.; Naranjo, J.E.; Anaya, J.J.; García, F.; Ponz, A.; Armingol, J.M. Advanced driver assistance system for road environments to improve safety and efficiency. Transp. Res. Procedia 2016, 14, 2245–2254. [Google Scholar] [CrossRef] [Green Version]
- Tang, A.; Yip, A. Collision avoidance timing analysis of DSRC-based vehicles. Accid. Anal. Prev. 2010, 42, 182–195. [Google Scholar] [CrossRef]
- Zhao, X.; Jing, S.; Hui, F.; Liu, R.; Khattak, A.J. DSRC-based rear-end collision warning system–An error-component safety distance model and field test. Transp. Res. Part C Emerg. Technol. 2019, 107, 92–104. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Luan, T.H.; Zhang, Y.; Mao, G. Infrastructure-cooperative algorithm for effective intersection collision avoidance. Transp. Res. Part C Emerg. Technol. 2018, 89, 188–204. [Google Scholar] [CrossRef]
- Santos-González, I.; Caballero-Gil, P.; Rivero-García, A.; Caballero-Gil, C. Priority and collision avoidance system for traffic lights. Ad Hoc Netw. 2019, 94, 101931. [Google Scholar] [CrossRef]
- Russo, J.N.; Sproesser, T.; Drouhin, F.; Basset, M. Risk level assessment for rear-end collision with Bayesian network. IFAC-PapersOnLine 2017, 50, 12514–12519. [Google Scholar] [CrossRef]
- Yu, J.; Petnga, L. Space-based collision avoidance framework for autonomous vehicles. Procedia Comput. Sci. 2018, 140, 37–45. [Google Scholar] [CrossRef]
- Riaz, F.; Niazi, M.A. Towards social autonomous vehicles: Efficient collision avoidance scheme using Richardson’s arms race model. PLoS ONE 2017, 12, e0186103. [Google Scholar] [CrossRef] [Green Version]
- Riaz, F.; Niazi, M.A. Enhanced emotion enabled cognitive agent-based rear-end collision avoidance controller for autonomous vehicles. Simulation 2018, 94, 957–977. [Google Scholar] [CrossRef]
- SAE. Definitions for terms related to driving automation systems for on-road motor vehicles. SAE Stand. J. 2016, 3016, 2016. [Google Scholar]
- Ziebinski, A.; Cupek, R.; Grzechca, D.; Chruszczyk, L. Review of advanced driver assistance systems (ADAS). In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2017; Volume 1906, p. 120002. [Google Scholar]
- Llorca, D.F. From driving automation systems to autonomous vehicles: Clarifying the terminology. arXiv 2021, arXiv:2103.10844. [Google Scholar]
- van Wyk, F.; Khojandi, A.; Masoud, N. Optimal switching policy between driving entities in semi-autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2020, 114, 517–531. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Boer, E.R. Designing human-centered automation: Trade-offs in collision avoidance system design. IEEE Trans. Intell. Transp. Syst. 2000, 1, 40–54. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; de Winter, J.C. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Parasuraman, R.; Manzey, D.H. Complacency and bias in human use of automation: An attentional integration. Hum. Factors 2010, 52, 381–410. [Google Scholar] [CrossRef] [PubMed]
- Strong, C.K.; Ye, Z.; Shi, X. Safety effects of winter weather: The state of knowledge and remaining challenges. Transp. Rev. 2010, 30, 677–699. [Google Scholar] [CrossRef]
- Usman, T.; Fu, L.; Miranda-Moreno, L.F. Quantifying safety benefit of winter road maintenance: Accident frequency modeling. Accid. Anal. Prev. 2010, 42, 1878–1887. [Google Scholar] [CrossRef] [PubMed]
- Wanvik, P.O. Effects of road lighting: An analysis based on Dutch accident statistics 1987–2006. Accid. Anal. Prev. 2009, 41, 123–128. [Google Scholar] [CrossRef]
- Wang, C.; Quddus, M.; Ison, S. A spatio-temporal analysis of the impact of congestion on traffic safety on major roads in the UK. Transp. A Transp. Sci. 2013, 9, 124–148. [Google Scholar] [CrossRef] [Green Version]
- Clarke, D.D.; Ward, P.; Bartle, C.; Truman, W. Killer crashes: Fatal road traffic accidents in the UK. Accid. Anal. Prev. 2010, 42, 764–770. [Google Scholar] [CrossRef] [PubMed]
- Susilo, Y.O.; Joewono, T.B.; Vandebona, U. Reasons underlying behaviour of motorcyclists disregarding traffic regulations in urban areas of Indonesia. Accid. Anal. Prev. 2015, 75, 272–284. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Kecojevic, V.; Komljenovic, D. Investigation of haul truck-related fatal accidents in surface mining using fault tree analysis. Saf. Sci. 2014, 65, 106–117. [Google Scholar] [CrossRef]
- Parker, D.; West, R.; Stradling, S.; Manstead, A.S. Behavioural characteristics and involvement in different types of traffic accident. Accid. Anal. Prev. 1995, 27, 571–581. [Google Scholar] [CrossRef]
- Walshe, D.G.; Lewis, E.J.; Kim, S.I.; O’Sullivan, K.; Wiederhold, B.K. Exploring the use of computer games and virtual reality in exposure therapy for fear of driving following a motor vehicle accident. CyberPsychol. Behav. 2003, 6, 329–334. [Google Scholar] [CrossRef]
- Gunnarsson, B.M.; Stomberg, M.W. Factors influencing decision making among ambulance nurses in emergency care situations. Int. Emerg. Nurs. 2009, 17, 83–89. [Google Scholar] [CrossRef] [PubMed]
- Brown, J.W.; Revell, K.M.; Richardson, J.; Clark, J.R.; Caber, N.; Amanatidis, T.; Langdon, P.; Bradley, M.; Thompson, S.; Skrypchuk, L.; et al. Customisation of Takeover Guidance in Semi-Autonomous Vehicles. In Designing Interaction and Interfaces for Automated Vehicles; CRC Press: Boca Raton, FL, USA, 2021; pp. 231–250. [Google Scholar]
- Hopkins, D.; Schwanen, T. Talking about automated vehicles: What do levels of automation do? Technol. Soc. 2021, 64, 101488. [Google Scholar] [CrossRef]
- Nikitas, A.; Vitel, A.E.; Cotet, C. Autonomous vehicles and employment: An urban futures revolution or catastrophe? Cities 2021, 114, 103203. [Google Scholar] [CrossRef]
- Riaz, F.; Khadim, S.; Rauf, R.; Ahmad, M.; Jabbar, S.; Chaudhry, J. A validated fuzzy logic inspired driver distraction evaluation system for road safety using artificial human driver emotion. Comput. Netw. 2018, 143, 62–73. [Google Scholar] [CrossRef]
- Upadhya, S.M.; Vinothina, V. Fuzzy logic based approach for possibility of road accidents. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1427, p. 012011. [Google Scholar]
- Poloni, M.; Ulivi, G.; Vendittelli, M. Fuzzy logic and autonomous vehicles: Experiments in ultrasonic vision. Fuzzy Sets Syst. 1995, 69, 15–27. [Google Scholar] [CrossRef]
- Pawlus, W.; Karimi, H.; Robbersmyr, K. A fuzzy logic approach to modeling a vehicle crash test. Open Eng. 2013, 3, 67–79. [Google Scholar] [CrossRef] [Green Version]
- Kurnaz, S.; Cetin, O.; Kaynak, O. Fuzzy logic based approach to design of flight control and navigation tasks for autonomous unmanned aerial vehicles. J. Intell. Robot. Syst. 2009, 54, 229–244. [Google Scholar] [CrossRef]
- Aduthaya, T.C.N. Master of Applied Science in Industrial Systems Engineering. Ph.D. Thesis, University of Regina, Regina, SK, USA, 2006. [Google Scholar]
- Wilensky, U.; Rand, W. An Introduction to Agent-Based Modeling: Modeling Natural, Social, and Engineered Complex Systems with NetLogo; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Hjorth, A.; Head, B.; Brady, C.; Wilensky, U. Levelspace: A netlogo extension for multi-level agent-based modeling. J. Artif. Soc. Soc. Simul. 2020, 23. [Google Scholar] [CrossRef]
- Kahn, K. An introduction to agent-based modeling. Phys. Today 2015, 68, 55. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Very Low | Low | Average | High | Very High |
|---|---|---|---|---|
| 0 to 0.1 | 0.11 to 0.25 | 0.251 to 0.5 | 0.51 to 0.75 | 0.751 to 1 |
| Variables Used | Meanings of Variables | Description of Variables | Function Name | Function Description |
|---|---|---|---|---|
| CD | Category Data | It will take input from sensors about every accident-causing factor | Get SensorValues() | Vehicle has sensors from which it can take information about different factors involved. |
| Data | Sensor data | Calculate the current situation of each category | Fuzzification(); | Mamdaini membership function will take sensor values as input and apply fuzzy logic. |
| Result | Chances of Accident (COA) | It contains the value of the chance of accident. If the value is high, then the required function will be called. | Controlbrak() | If fuzzy logic functions show higher chance of accident, then our proposed system will apply brakes. |
| EF | Environmental Factor | Result of environmental factor obtained from data variable | ControlSpeed() & generate alert | It will accelerate or decelerate the vehicle’s speed (reduce/fast). |
| TOA | Time Of Accident | Result of time factor obtained from Data variable | ControlSpeed() & generate alert | It will accelerate or decelerate the vehicle’s speed (reduce/fast). |
| PYF | Physical Factor | Result of physical factor obtained from Data variable | Control speed send message() | It will accelerate or decelerate the vehicle’s speed (reduce/fast). |
| WD | Weekday Factor | Result of weekday factor obtained from Data variable List | ControlSpeed() & generate alert | It will accelerate or decelerate the vehicle’s speed (reduce/fast). |
| DF | Driver Factor | Result of driver factors obtained from Data variable | ControlSpeed() & generate alert | It will accelerate or decelerate the vehicle’s speed (reduce/fast). |
| Sr. | DT | WD | PF | DE | DA | EF | COA |
|---|---|---|---|---|---|---|---|
| 1 | 0.1(VL) | 0.25(L) | 0.12(L) | 0.25(L) | 0.15(L) | 0.15(L) | 0.12(L) |
| 2 | 0.3(L) | 0.15(L) | 0.17(L) | 0.35(AVG) | 0.2(L) | 0.3(AVG) | 0.20(L) |
| 3 | 0.3(L) | 0.15(L) | 0.15(L) | 0.12(L) | 0.3(AVG) | 0.2(L) | 0.20(L) |
| 4 | 0.2(L) | 0.15(L) | 0.2(L) | 0.35(AVG) | 0.25(AVG) | 0.40(AVG) | 0.26(AVG) |
| 5 | 0.1(VL) | 0.03(VL) | 0.07(VL) | 0.35(L) | 0.3(AVG) | 0.23(L) | 0.08(VL) |
| 6 | 0.5(AVG) | 0.39(AVG) | 0.2(L) | 0.45(AVG) | 0.45(AVG) | 0.28(AVG) | 0.3(AVG) |
| 7 | 0.45(AVG) | 0.03(VL) | 0.2(L) | 0.42(AVG) | 0.35(AVG) | 0.44(AVG) | 0.28(AVG) |
| 8 | 0.5(AVG) | 0.39(AVG) | 0.35(AVG) | 0.5(AVG) | 0.5(AVG) | 0.46(AVG) | 0.44(AVG) |
| 9 | 0.6(H) | 0.53(H) | 0.4(AVG) | 0.6(H) | 0.5(AVG) | 0.5(AVG) | 0.51(H) |
| 10 | 0.6(H) | 0.32(L) | 0.6(H) | 0.35(AVG) | 0.7(H) | 0.65(H) | 0.6(H) |
| 11 | 0.45(AVG) | 0.32(L) | 0.4(AVG) | 0.55(H) | 0.7(H) | 0.69(H) | 0.75(H) |
| 12 | 0.7(H) | 0.5(AVG) | 0.2(L) | 0.45(AVG) | 0.9(VH) | 0.85(H) | 0.82(VH) |
| 13 | 0.7(H) | 0.5(AVG) | 0.6(H) | 0.55(H) | 0.9(VH) | 0.85(VH) | 0.9(VH) |
| 14 | 0.8(H) | 0.5(AVG) | 0.4(AVG) | 0.65(H) | 0.95(VH) | 0.9(H) | 0.97(VH) |
| Exp # | EF | PF | DF | TF | WF | Collisions without Factors | Collisions with Factors |
|---|---|---|---|---|---|---|---|
| 1 | 0.3 | 0.4 | 0.8 | 0.45 | 0.91 | 65 | 4 |
| 2 | 0.46 | 0.8 | 0.7 | 0.55 | 0.48 | 17 | 0 |
| 3 | 0.3 | 0.4 | 0.4 | 0.51 | 0.45 | 26 | 2 |
| 4 | 0.7 | 0.8 | 0.7 | 0.85 | 0.48 | 46 | 3 |
| 5 | 0.7 | 0.8 | 0.7 | 0.25 | 0.44 | 47 | 7 |
| 6 | 0.7 | 0.8 | 0.8 | 0.15 | 0.54 | 314 | 23 |
| 7 | 0.3 | 0.4 | 0.8 | 0.95 | 0.90 | 404 | 15 |
| 8 | 0.7 | 0.6 | 0.8 | 0.55 | 0.45 | 28 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razzaq, S.; Dar, A.R.; Shah, M.A.; Khattak, H.A.; Ahmed, E.; El-Sherbeeny, A.M.; Lee, S.M.; Alkhaledi, K.; Rauf, H.T. Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles. Appl. Sci. 2022, 12, 1049. https://doi.org/10.3390/app12031049
Razzaq S, Dar AR, Shah MA, Khattak HA, Ahmed E, El-Sherbeeny AM, Lee SM, Alkhaledi K, Rauf HT. Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles. Applied Sciences. 2022; 12(3):1049. https://doi.org/10.3390/app12031049
Chicago/Turabian StyleRazzaq, Sheeba, Amil Roohani Dar, Munam Ali Shah, Hasan Ali Khattak, Ejaz Ahmed, Ahmed M. El-Sherbeeny, Seongkwan Mark Lee, Khaled Alkhaledi, and Hafiz Tayyab Rauf. 2022. "Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles" Applied Sciences 12, no. 3: 1049. https://doi.org/10.3390/app12031049
APA StyleRazzaq, S., Dar, A. R., Shah, M. A., Khattak, H. A., Ahmed, E., El-Sherbeeny, A. M., Lee, S. M., Alkhaledi, K., & Rauf, H. T. (2022). Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles. Applied Sciences, 12(3), 1049. https://doi.org/10.3390/app12031049