

Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process


Abstract
:1. Introduction
2. Establishment of Evaluation System
2.1. Determination of Evaluation Index
- (1)
- Braking distance: When the vehicle is at a certain speed, the driver starts to take braking measures until the vehicle stops completely. The smaller the braking distance, the better the braking performance of the car. At present, most semi-trailer trains are equipped with ABS. References [12,13] show that ABS can reduce the braking distance of the vehicle by controlling the slip rate of the vehicle during braking. Because the braking distance is more intuitive, it is widely used to evaluate the braking efficiency.
- (2)
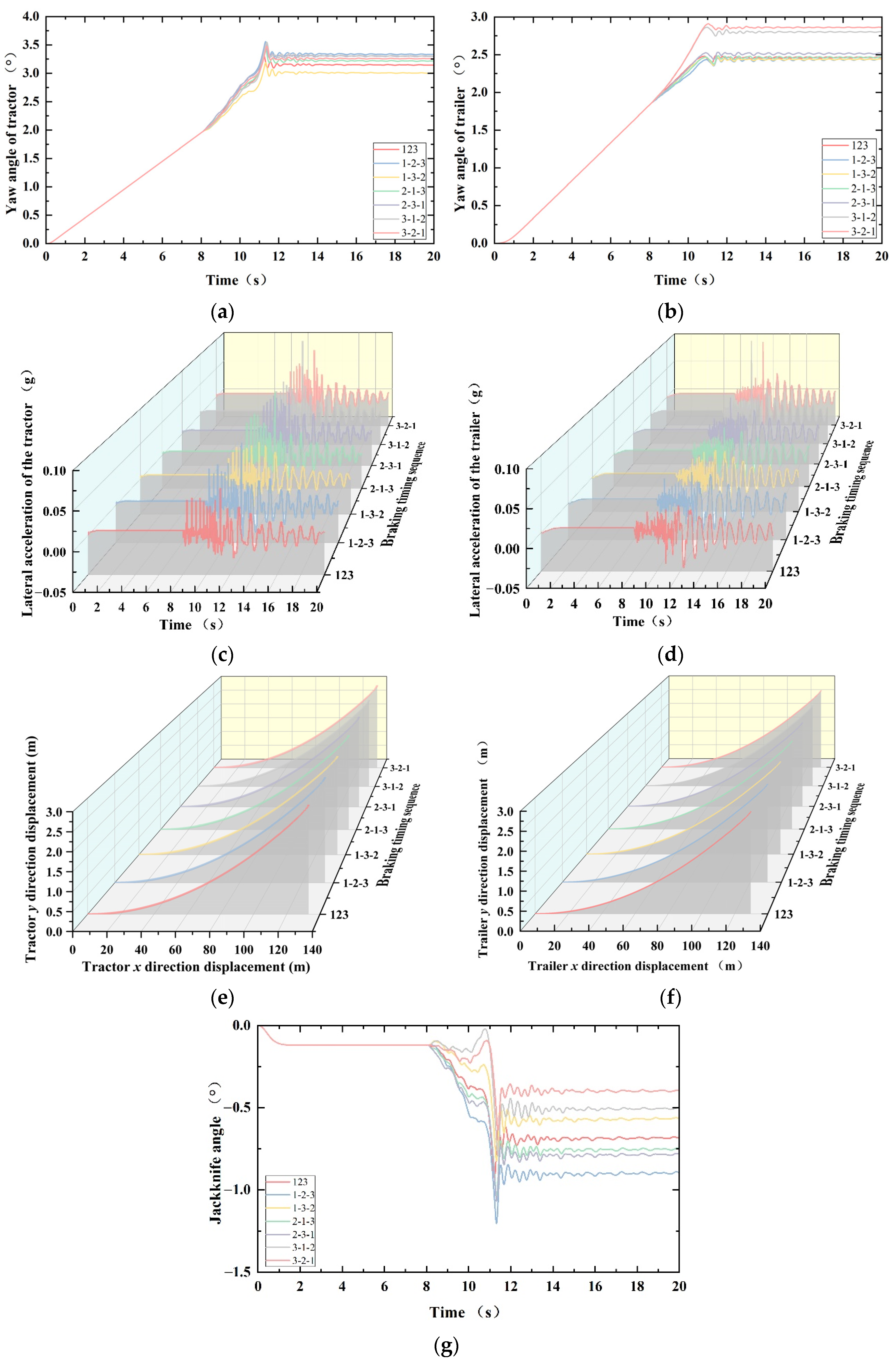
- Yaw angle: The yaw angle around the z-axis is generated at the center of mass of the vehicle. If the braking force is unevenly distributed or the braking timing sequence is improper, the vehicle will swing laterally. Therefore, in order to ensure the lateral stability of the semi-trailer truck, the yaw angle should be used as an evaluation index.
- (3)
- Jackknife angle: The angle formed by the longitudinal axis of the tractor and the longitudinal axis of the semi-trailer. The incorrect braking timing sequence will produce a large jackknife angle, which will cause the semi-trailer train to fold and cause serious traffic accidents.
- (4)
- Lateral acceleration: The acceleration along the lateral axial direction of the vehicle during braking. Greater lateral acceleration will cause lateral instability of the vehicle during braking, and, in severe cases, the vehicle will roll over.
- (5)
- Brake deviation: The phenomenon of the vehicle running to one side due to an uncoordinated braking force or improper braking timing sequence. When the braking deviation is serious, the vehicle will slip sideways, causing the driver to lose control of the vehicle and causing serious traffic accidents.
2.2. Fuzzy Analytic Hierarchy Evaluation Algorithm
3. Semi-Trailer Train Simulation Model Establishment
3.1. Establishment of TruckSim Model
3.1.1. Vehicle Body Model
3.1.2. Tire Model
3.1.3. Powertrain Model
3.1.4. Suspension Model
3.1.5. Steering and Braking Model
4. Vehicle Test
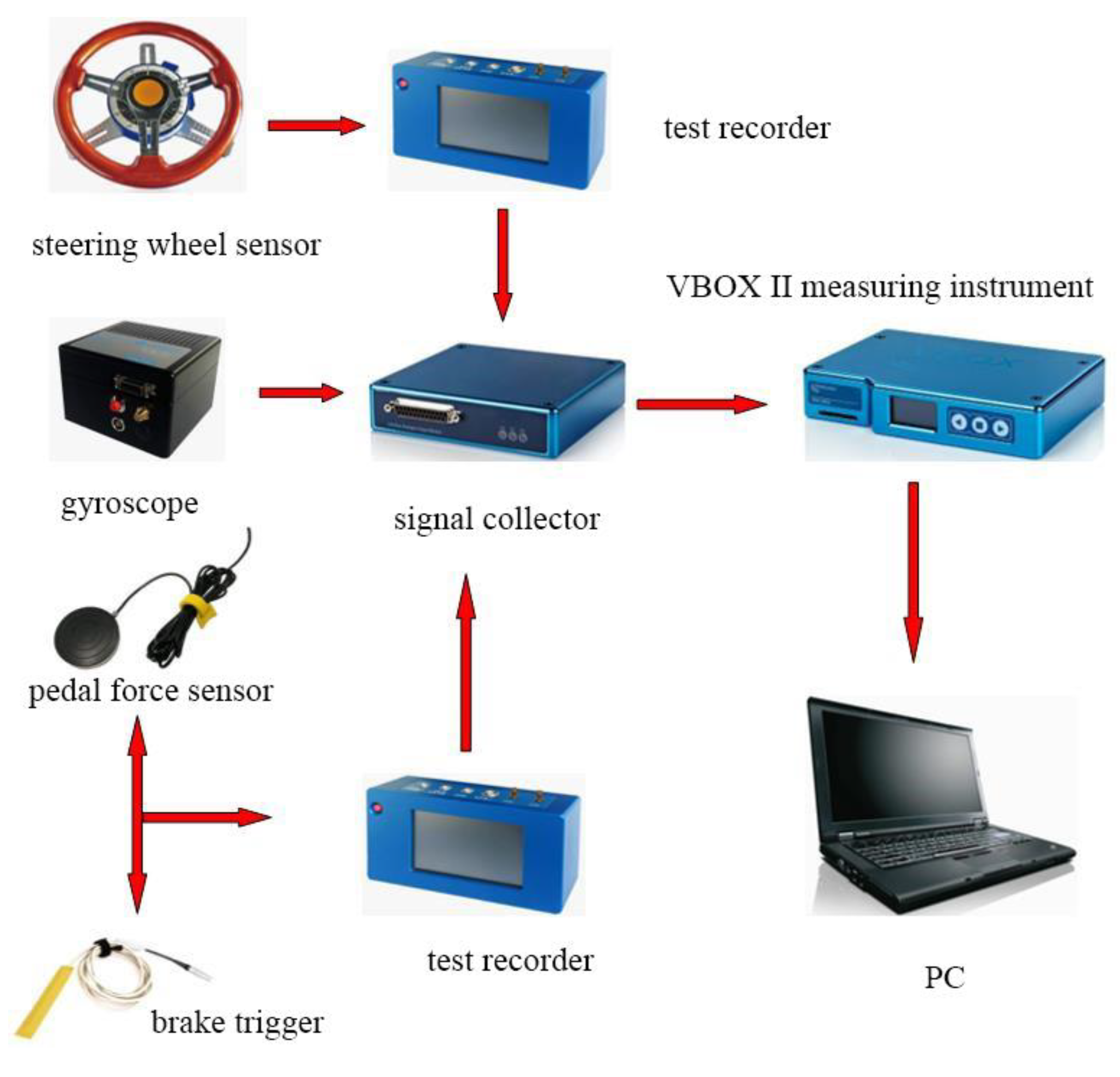
4.1. Construction of Detection System
4.2. Vehicle Test
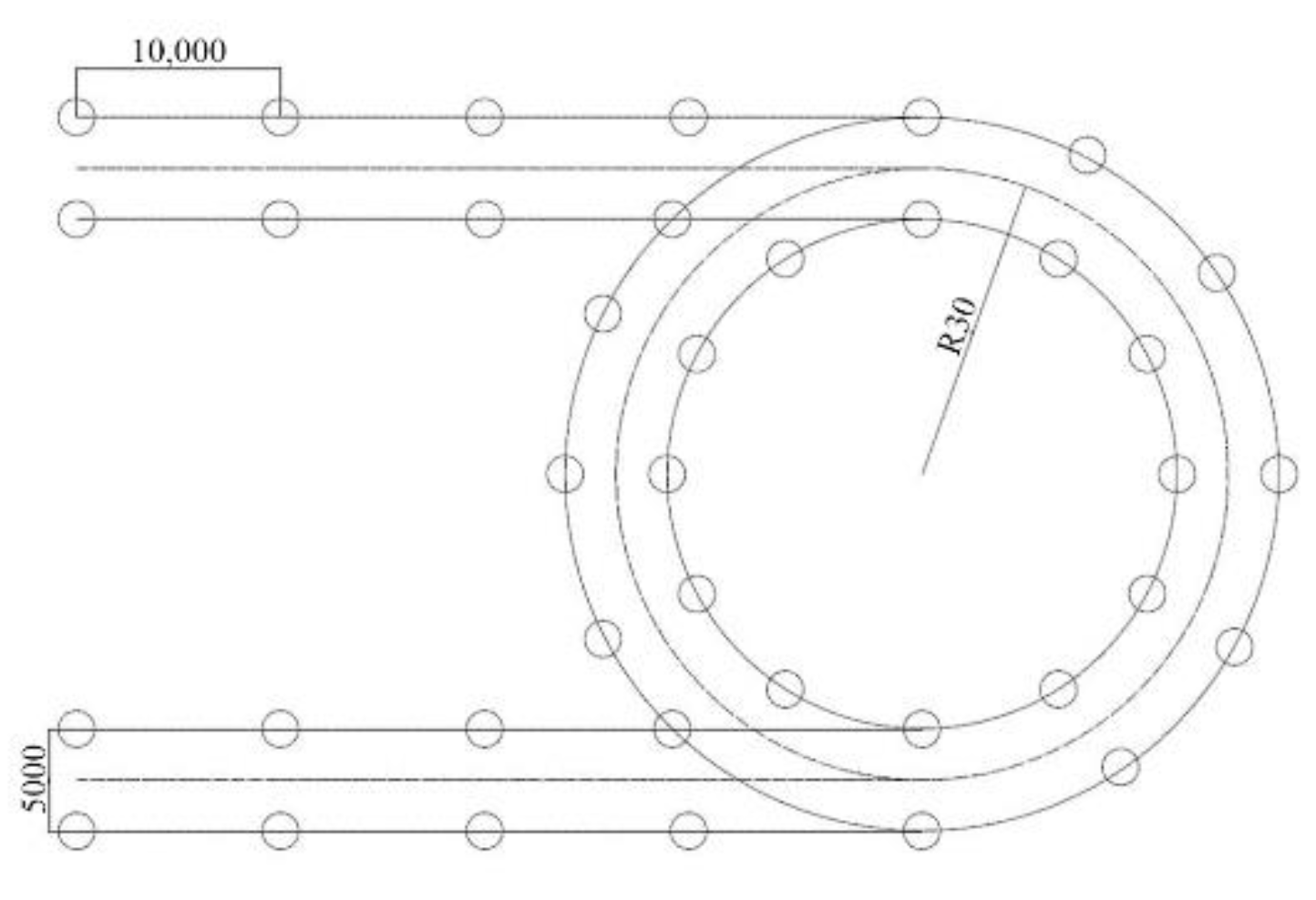
4.2.1. Vehicle and Site Selection
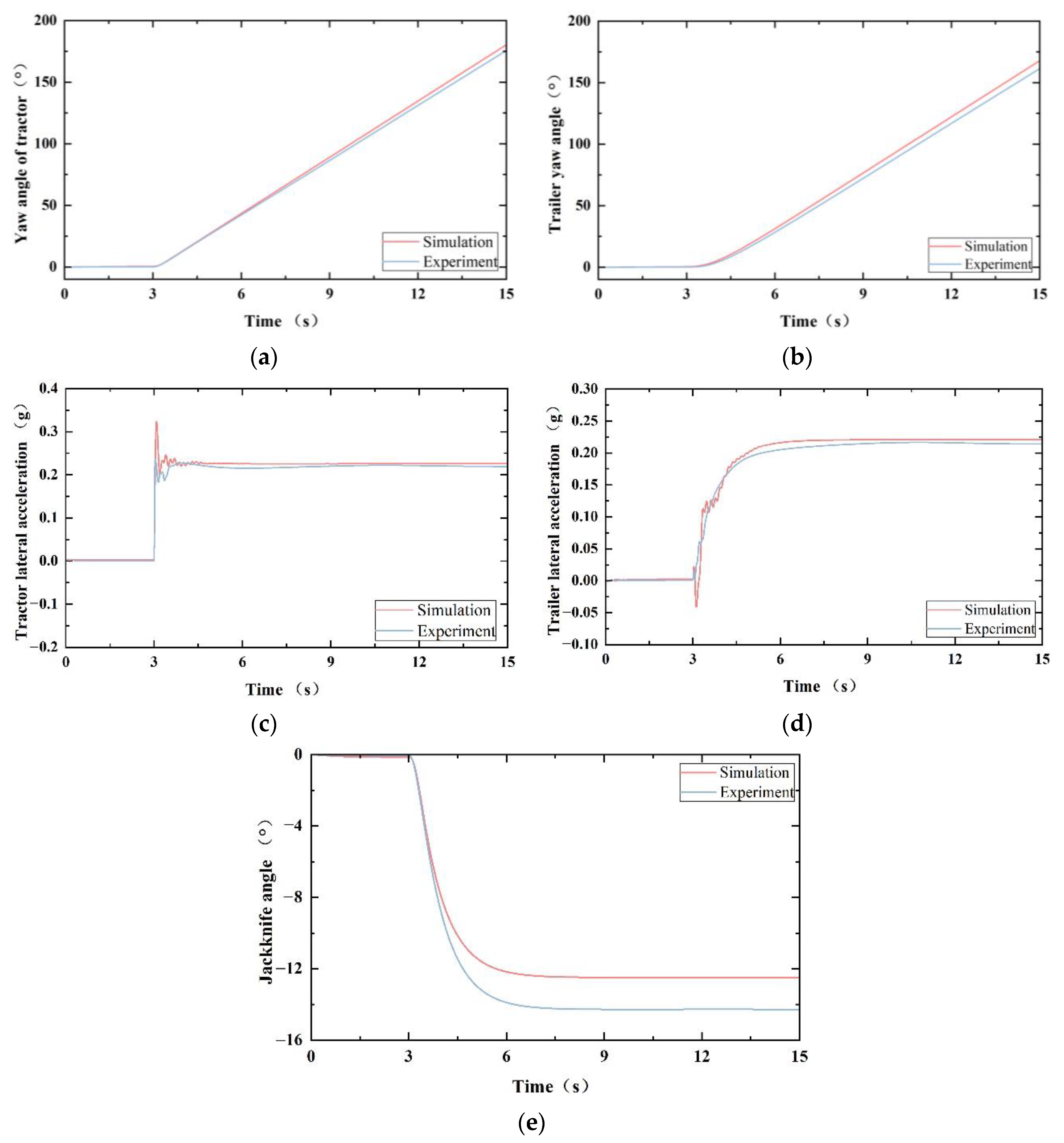
4.2.2. Simulation Test Analysis
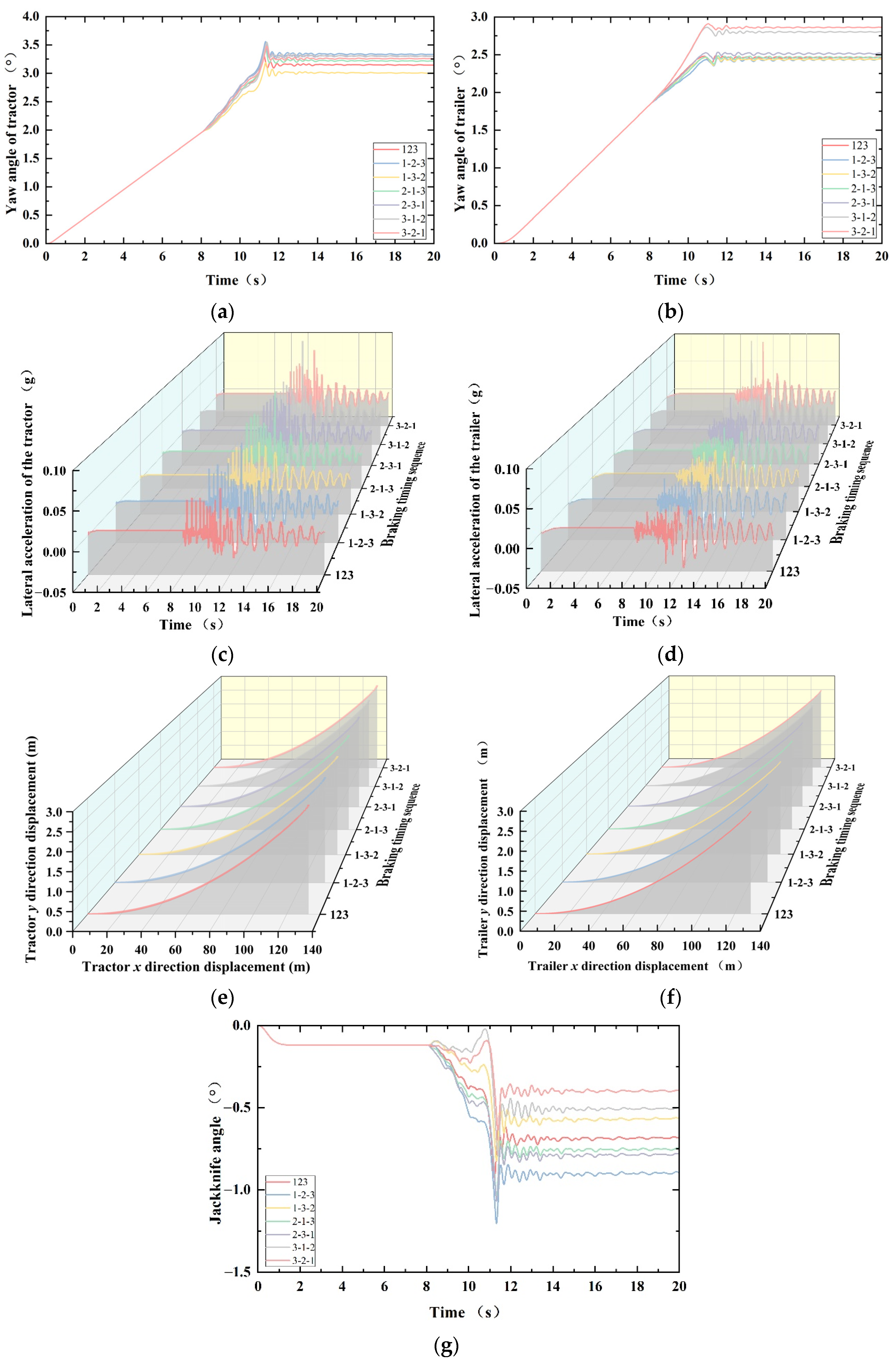
5. Simulation Analysis of Braking Timing Sequence Stability of Semi-Trailer Train
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, C. Analysis and Research of Automotive Brake Performance Based on MATLAB. In Proceedings of the 2014 International Conference on Mechatronics Engineering and Computing Technology, Shanghai, China, 9 April 2014. [Google Scholar]
- Wang, Z.; Wei, W.; Si, L.R.; Wang, Y.Z.; Yan, Q.D. Application of Fuzzy Analytic Hierarchy Process in Comprehensive Evaluation of Braking Performance of Hydrodynamic Retarder. Chin. Hydrau. Pneum. 2021, 45, 13–20. [Google Scholar]
- Lv, N. Study in the Appraising indexes of Automotive Braking Properties. J. Guangxi Agric. Univ. 1993, 12, 81–84. [Google Scholar]
- Saaty, T.L.; Ozdemir, M.S. The Encyclicon: A Dictionary of Decisions with Dependence and Feedback Based on the Analytic Network Process; RWS Publications: Philadelphia, PA, USA, 2021; pp. 51–89. [Google Scholar]
- GB 7258-2017; Traffic Management Research Institute of the Ministry of Public Security. Technical Specifications for Safety of Power-Driven Vehicles Operating on Roads; Standards Press of China: Beijing, China, 2017; pp. 20–27.
- GB 21670-2008; Traffic Management Research Institute of the Ministry of Public Security. Technical Requirements and Testing Methods for Passenger Car Braking System; Standards Press of China: Beijing, China, 2008; pp. 5–19.
- GB 38900-2020; Traffic Management Research Institute of the Ministry of Public Security. Items and Methods for Safety Technology Inspection of Motor Vehicles; Standards Press of China: Beijing, China, 2020; pp. 34–38.
- National Highway Traffic Safety Administration. FMVSS121-2017 Air Brake System; NHTSA: Washington, DC, USA, 2017; pp. 575–597.
- The United Nations Economic Commission for Europe. ECER13-2014 Uniform Provisions Concerning the Approval of Categories M, N and O with Regard to Braking; The United Nations Economic Commission for Europe: Genève, Swiss, 2014; pp. 42–262. [Google Scholar]
- Zhang, L.B.; Feng, S.Y.; Shan, H.Y.; Wang, G.R. Tractor-trailer-train braking time sequence detection based on monocular vision. Adv. Mech. Eng. 2021, 13, 1–13. [Google Scholar] [CrossRef]
- Guo, Z.K. Design and Application of Modern Automobile Train; Beijing Institute of Technology Press: Beijing, China, 2006; pp. 131–154. [Google Scholar]
- Gowda, V.D.; Ramachandra, A.C.; Thippeswamy, M.N.; Pandurangappa, C.; Naidu, R.P. Modelling and performance evaluation of anti-lock braking system. J. Eng. Sci. Technol. 2019, 14, 3028–3045. [Google Scholar]
- Wu, M.; Shih, M. Simulated and experimental study of hydraulic anti-lock braking system using sliding-mode PWM control. Mechatronics 2003, 13, 331–351. [Google Scholar] [CrossRef]
- Saaty, T.L.; Vargas, L.G. Models, Methods, Concepts & Applications of the Analytic Hierarchy Process; Kluwer Academic Publishers: London, UK, 2012; pp. 47–135. [Google Scholar]
- Li, Y. Research on the handling stability of a new generation of combinations of vehicles-the double road train. Master’s Thesis, Research Institute of Highway Ministry of Transport, Beijing, China, 2020. [Google Scholar]
- GB/T 2977-2016; National Tire Rim Standardization Technical Committee. Size Designation, Dimensions, Inflation Pressure and Load Capacity for Truck Tyres; Standards Press of China: Beijing, China, 2016; pp. 33–61.
- Secretariat of National Tire Rim Standardization Technical Committee. Standard Manual of European Tire Rim Technology Organization (ETRTO); China Petroleum and Chemical Industry Federation: Beijing, China, 2004; p. 20. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Expert 1 | Expert 2 | Expert 3 |
|---|---|---|---|
| Professional title | Professor | Senior engineer | Associate professor |
| Academic degree | Doctor | Master | Master |
| Seniority (years) | 25 | 28 | 27 |
| Scale Value | Linguistic Variable | Triangular Fuzzy Number |
|---|---|---|
| 1 | Same importance | (1, 1, 1) |
| 3 | A little important | (1, 3, 5) |
| 5 | Basically important | (3, 5, 7) |
| 7 | Relative importance | (5, 7, 9) |
| 9 | Absolutely important | (7, 8, 9) |
| The reciprocal of 3, 5, 7, 9 | Exchange of importance of two indicators | |
| A1 | A2 | A3 | A4 | A5 | |
|---|---|---|---|---|---|
| A1 | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A2 | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (0.200, 0.333, 1.000) | (1.000, 1.000, 1.000) |
| A3 | (1.000, 3.000, 5.000) | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) | (1.000, 3.000, 5.000) | (1.000, 3.000, 5.000) |
| A4 | (1.000, 1.000, 1.000) | (1.000, 3.000, 5.000) | (0.200, 0.333, 1.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) |
| A5 | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) |
| A1 | A2 | A3 | A4 | A5 | |
|---|---|---|---|---|---|
| A1 | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (0.143, 0.200, 0.333) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A2 | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (0.200, 0.333, 1.000) | (1.000, 3.000, 5.000) |
| A3 | (3.000, 5.000, 7.000) | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) | (3.000, 5.000, 7.000) | (1.000, 3.000, 5.000) |
| A4 | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (0.143, 0.200, 0.333) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) |
| A5 | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (0.200, 0.333, 1.000) | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) |
| A1 | A2 | A3 | A4 | A5 | |
|---|---|---|---|---|---|
| A1 | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (0.143, 0.200, 0.333) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A2 | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (1.000, 2.000, 3.000) | (1.000, 3.000, 5.000) |
| A3 | (3.000, 5.000, 7.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (1.000, 3.000, 5.000) | (1.000, 1.000, 1.000) |
| A4 | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A5 | (1.000, 1.000, 1.000) | (0.200, 0.333, 1.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A1 | A2 | A3 | A4 | A5 | |
|---|---|---|---|---|---|
| A1 | (1.000, 1.000, 1.000) | (0.342, 0.481, 1.000) | (0.160, 0.237, 0.481) | (1.000, 1.000, 1.000) | (1.000, 1.000, 1.000) |
| A2 | (1.000, 2.080, 2.924) | (1.000, 1.000, 1.000) | (0.342, 0.481, 1.000) | (0.342, 0.481, 1.000) | (1.000, 2.080, 2.924) |
| A3 | (2.080, 4.217, 6.257) | (1.000, 2.080, 2.924) | (1.000, 1.000, 1.000) | (1.442, 3.557, 5.593) | (1.000, 2.080, 2.924) |
| A4 | (1.000, 1.000, 1.000) | (1.000, 1.442, 1.710) | (0.179, 0.281, 0.693) | (1.000, 1.000, 1.000) | (0.342, 0.481, 1.000) |
| A5 | (1.000, 1.000, 1.000) | (0.342, 0.481, 1.000) | (0.342, 0.481, 1.000) | (1.000, 2.080, 2.924) | (1.000, 1.000, 1.000) |
| Goal Layer | Indicator Layer | Weight |
|---|---|---|
| Braking timing sequence | Braking distance | 0.083 |
| Yaw angle | 0.216 | |
| Jackknife angle | 0.412 | |
| Lateral acceleration | 0.122 | |
| Brake deviation | 0.167 |
| Parameter | Tractor | Trailer |
|---|---|---|
| Body height | 3200 mm | 2950 mm |
| Body width | 2540 mm | 2560 mm |
| Distance between centroid and front axis | 1200 mm | 5100 mm |
| The height of centroid from ground | 1250 mm | 1900 mm |
| Spring load quality | 8400 kg | 8500 kg |
| Yaw inertia | 48,384.0 kg·m2 | 113,241.2 kg·m2 |
| Roll inertia | 6026.2 kg·m2 | 6184.7 kg·m2 |
| Pitch inertia | 48,384.0 | 113,241.2 kg·m2 |
| Parameter | Numbers and Units |
|---|---|
| Maximum power output | 279 kW |
| Maximum torque | 1650 N·m |
| Maximum torque speed | 1200~1600 rpm |
| Rated speed | 2100 rpm |
| Gear Position | R1 | R2 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gear ratio | 11.56 | 2.59 | 12.1 | 9.41 | 7.31 | 5.71 | 4.46 | 3.48 | 2.71 | 2.11 | 1.64 | 1.28 |
| Parameter | Steering Axle | Driving Axle | Tractor Axle |
|---|---|---|---|
| Unsprung mass | 570 kg | 735 kg | 665 kg |
| Wheel track | 2030 mm | 1863 mm | 1863 mm |
| Wheel center height | 510 mm | 530 mm | 530 mm |
| Item | Simultaneous | 1-2-3 | 1-3-2 | 2-1-3 | 2-3-1 | 3-1-2 | 3-2-1 |
|---|---|---|---|---|---|---|---|
| Tractor yaw angle | 3.319° | 3.559° | 3.190° | 3.422° | 3.512° | 3.548° | 3.479° |
| Trailer yaw angle | 2.487° | 2.458° | 2.467° | 2.486° | 2.533° | 2.863° | 2.910° |
| Tractor lateral acceleration | 0.060 g | 0.084 g | 0.053 g | 0.097 g | 0.066 g | 0.122 g | 0.082 g |
| Trailer lateral acceleration | 0.035 g | 0.043 g | 0.040 g | 0.041 g | 0.057 g | 0.124 g | 0.098 g |
| Jackknife angle | 0.924° | 1.201° | 0.823° | 1.043° | 1.068° | 0.792° | 0.636° |
| Braking distance | 22.354 m | 23.736 m | 23.449 m | 23.760 m | 23.800 m | 24.421 m | 24.313 m |
| Braking deviation | 2.829 m | 2.693 m | 2.686 m | 2.696 m | 2.703 m | 2.721 m | 2.723 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, S.; Zhang, L.; Shan, H.; Zhang, M. Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process. Appl. Sci. 2022, 12, 12605. https://doi.org/10.3390/app122412605
Feng S, Zhang L, Shan H, Zhang M. Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process. Applied Sciences. 2022; 12(24):12605. https://doi.org/10.3390/app122412605
Chicago/Turabian StyleFeng, Shiyuan, Libin Zhang, Hongying Shan, and Minghang Zhang. 2022. "Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process" Applied Sciences 12, no. 24: 12605. https://doi.org/10.3390/app122412605
APA StyleFeng, S., Zhang, L., Shan, H., & Zhang, M. (2022). Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process. Applied Sciences, 12(24), 12605. https://doi.org/10.3390/app122412605