
An On-Site-Based Opportunistic Routing Protocol for Scalable and Energy-Efficient Underwater Acoustic Sensor Networks


Abstract
1. Introduction
- (1)
- We apply a novel on-site architecture to the proposed protocol, locating the data center near the data source on the seabed. The on-site architecture can effectively minimize the number of forwarding hops in routing by shortening the distance between the source and sink nodes, lowering the hop count in routing and enhancing transmission reliability.
- (2)
- We group the network into a number of clusters by an unsupervised learning algorithm. Besides, to improve the reliability of the network and to avoid the failure of a single-point, a mechanism for the selection of the cluster head and potential cluster head is designed, which both takes the residual energy and location of the nodes into account.
- (3)
- We introduce the Q-Learning algorithm to the OR paradigm and elaborately design the reward function for Q-Learning, which jointly considers the factors of residual energy, delay, and PDR. In addition, a waiting mechanism based on the computed Q-value is designed to improve transmission reliability and reduce packet conflicts via the OR broadcast features, making the routing protocols reliable and scalable.
- (4)
- To be more realistic, different communication ranges and network scales are set. The overall performance of SROA is evaluated and compared to existing routing protocols.
2. Network Model
2.1. System Model
- (1)
- (2)
- The initial energy of underwater sensor nodes is same; however, the sink node is not restricted by energy. Each node has the ability to keep its recent communication records in local storage [21].
- (3)
2.2. Underwater Acoustic Channel Model
2.3. Q-Learning Technique
3. Design of SROA
3.1. The SROA Overview
3.2. Packet Structure of SROA Protocol
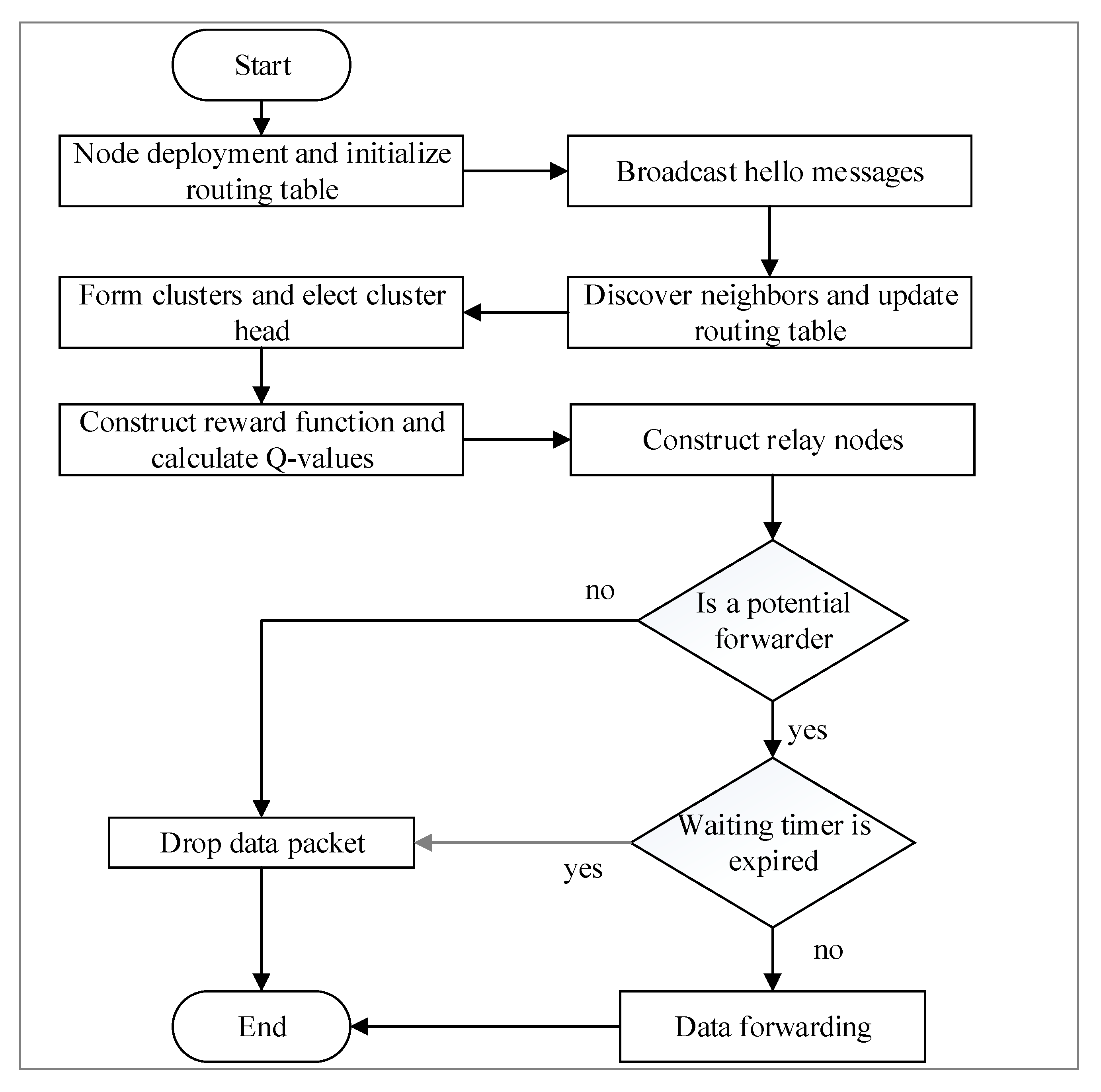
3.3. SROA Protocol Description
| Algorithm 1: The procedure of Clustering. |
|
| Algorithm 2: Routing Process. |
|
3.4. Design of Reward Function
4. Simulations and Analysis
4.1. Simulation Setting
4.2. Numerical Results
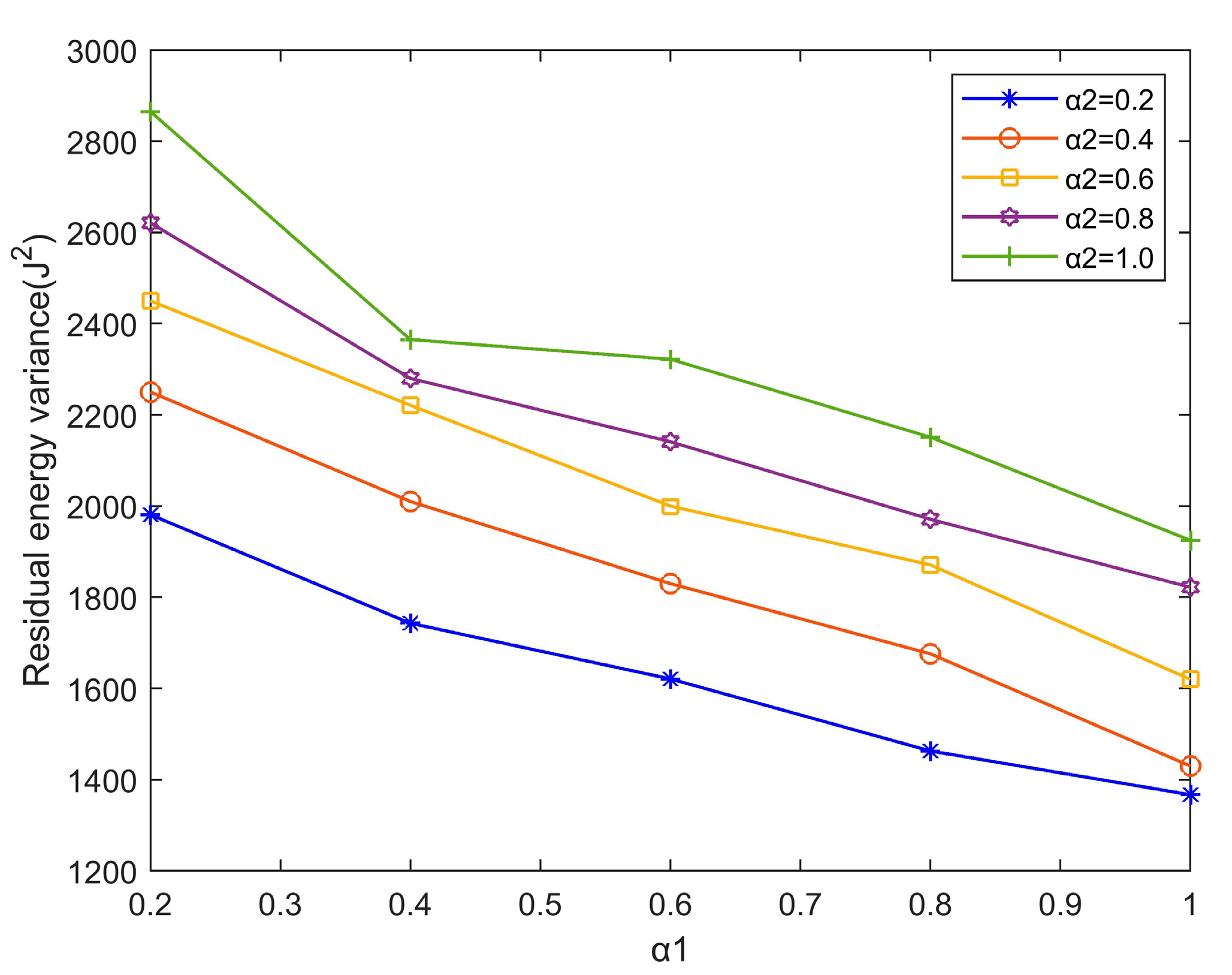
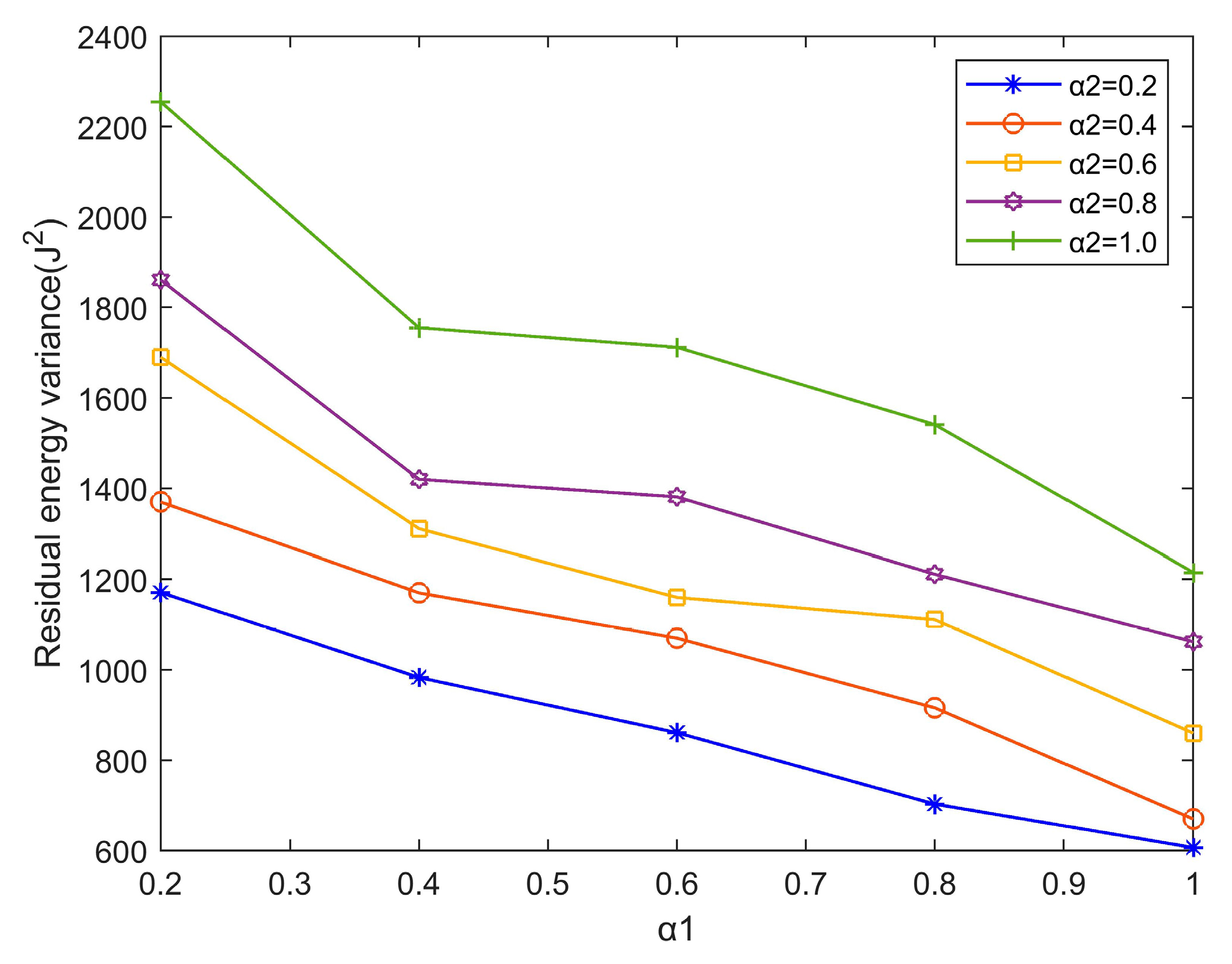
4.2.1. Parameter Analysis
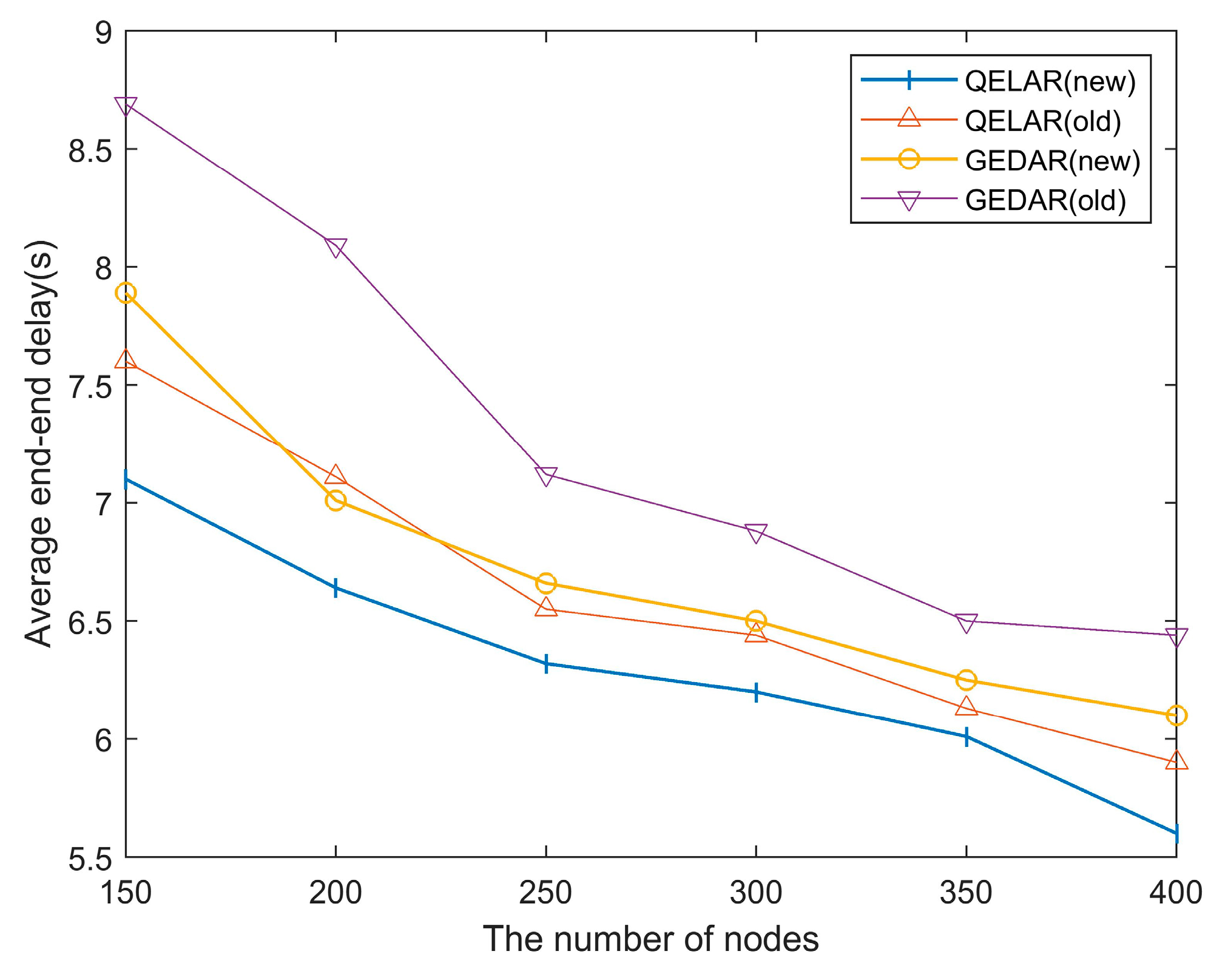
4.2.2. Architecture Analysis
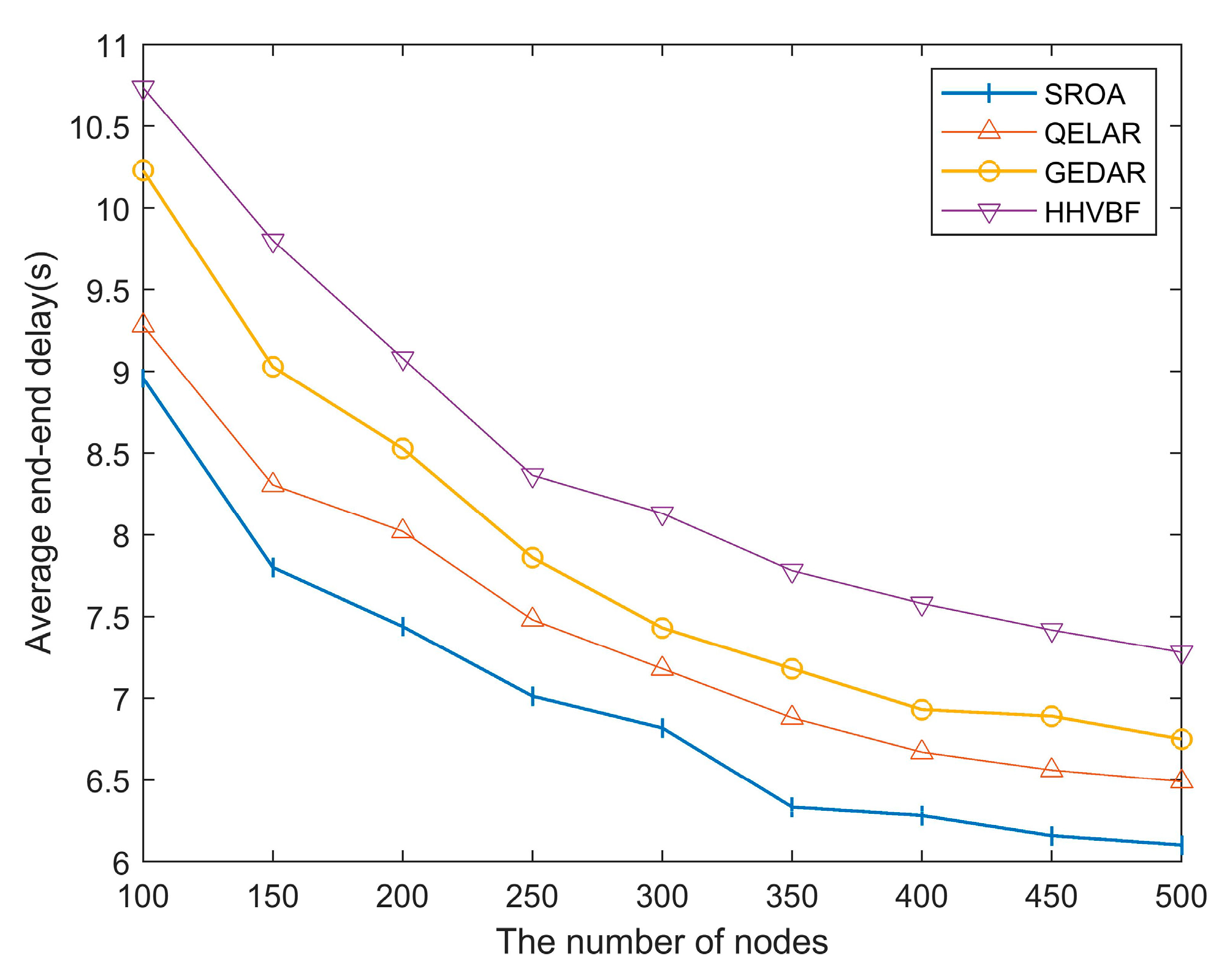
4.2.3. Average End-to-End Delay
4.2.4. Packet Delivery Rate
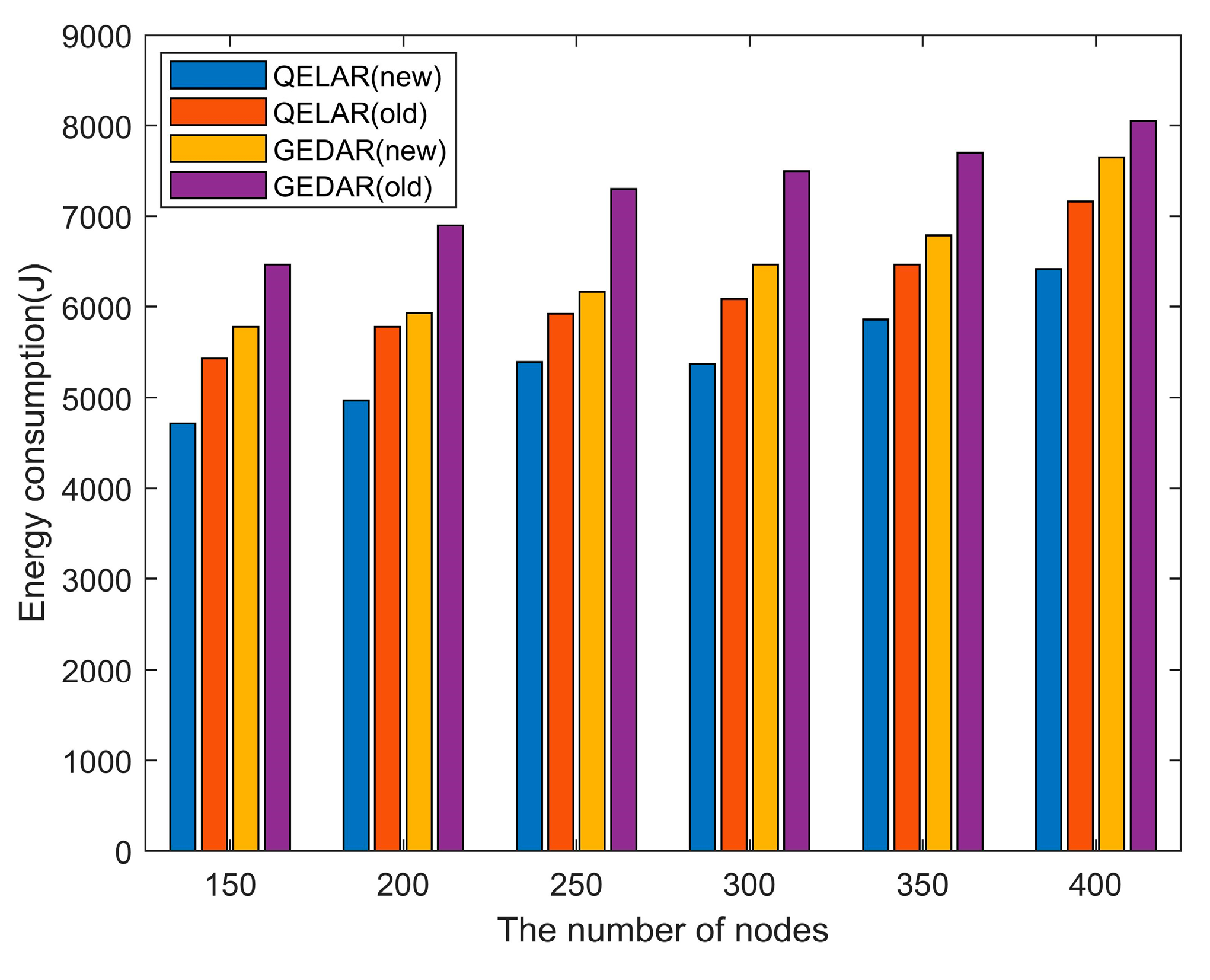
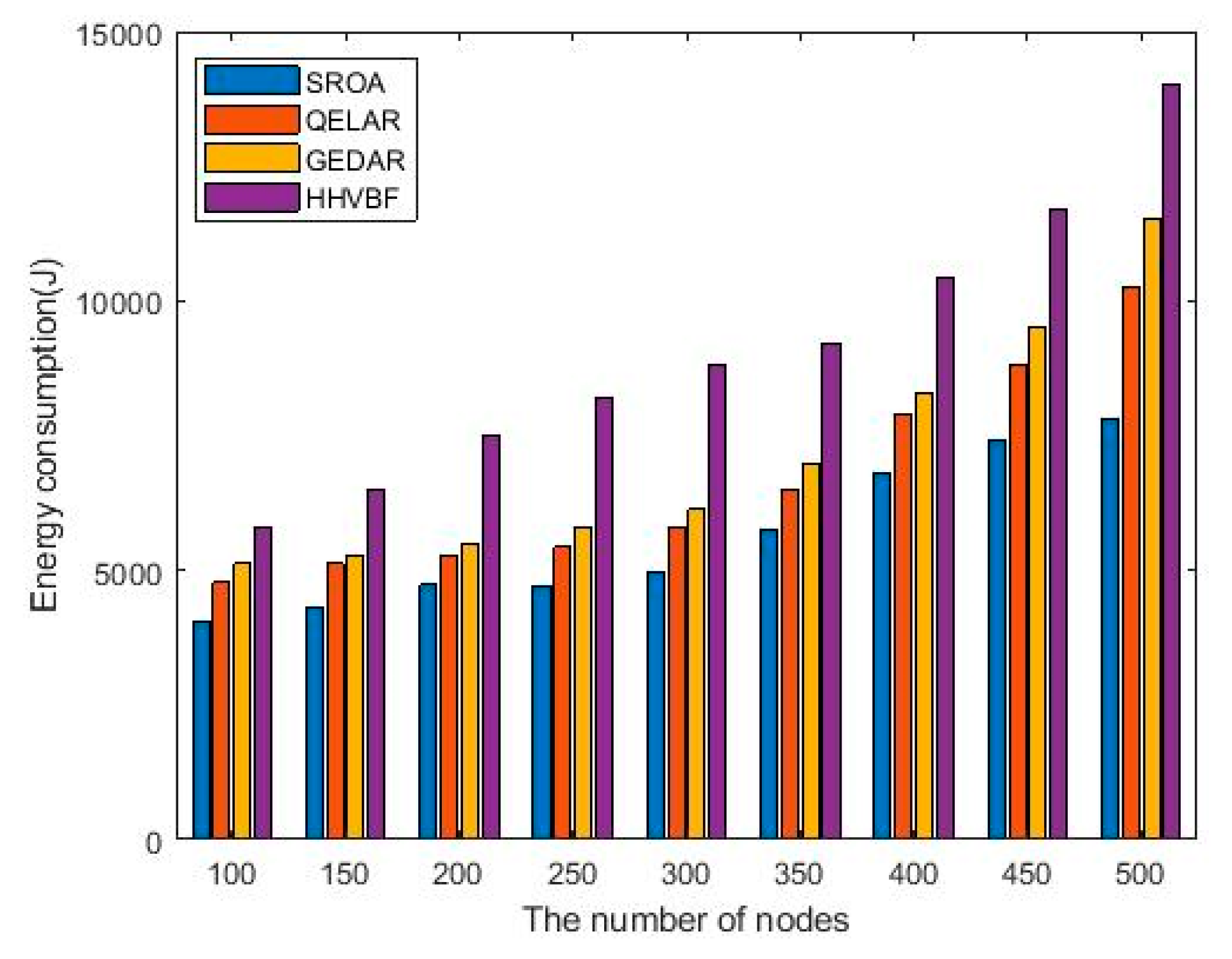
4.2.5. Energy Consumption
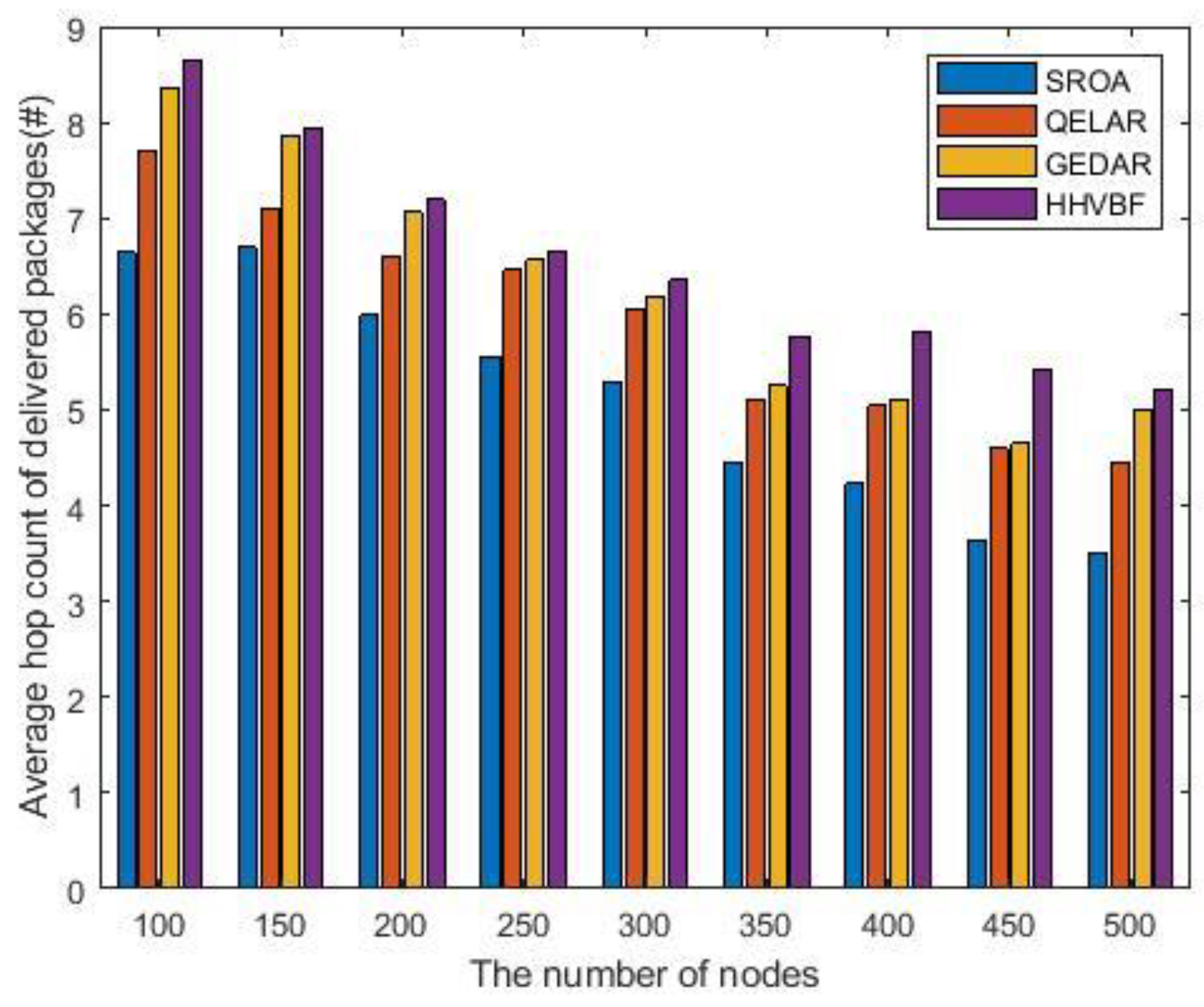
4.2.6. Average Hop Count
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khisa, S.; Moh, S. Survey on Recent Advancements in Energy-Efficient Routing Protocols for Underwater Wireless Sensor Networks. IEEE Access 2021, 9, 55045–55062. [Google Scholar] [CrossRef]
- Wei, X.H.; Guo, H.; Wang, X.W.; Wang, X.N.; Qiu, M.K. Reliable Data Collection Techniques in Underwater Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2022, 24, 404–431. [Google Scholar] [CrossRef]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.L.P. Underwater Internet of Things in Smart Ocean: System Architecture and Open Issues. IEEE Trans. Ind. Inform. 2020, 16, 4297–4307. [Google Scholar] [CrossRef]
- Jin, Z.; Zhao, Q.; Su, Y. RCAR: A Reinforcement-Learning-Based Routing Protocol for Congestion-Avoided Underwater Acoustic Sensor Networks. IEEE Sens. J. 2019, 19, 10881–10891. [Google Scholar] [CrossRef]
- Xiao, X.; Huang, H.; Wang, W. Underwater Wireless Sensor Networks: An Energy-Efficient Clustering Routing Protocol Based on Data Fusion and Genetic Algorithms. Appl. Sci. 2021, 11, 312. [Google Scholar] [CrossRef]
- Alfouzan, F.A. Energy-Efficient Collision Avoidance MAC Protocols for Underwater Sensor Networks: Survey and Challenges. J. Mar. Sci. Eng. 2021, 9, 741. [Google Scholar] [CrossRef]
- Chen, Y.G.; Zhu, J.Y.; Wan, L.; Fang, X.; Tong, F.; Xu, X.M. Routing failure prediction and repairing for AUV-assisted underwater acoustic sensor networks in uncertain ocean environments. Appl. Acoust. 2022, 186, 108479. [Google Scholar] [CrossRef]
- Hindu, S.K.; Hyder, W.; Luque-Nieto, M.A.; Poncela, J.; Otero, P. Self-Organizing and Scalable Routing Protocol (SOSRP) for Underwater Acoustic Sensor Networks. Sensors 2019, 19, 3130. [Google Scholar] [CrossRef] [PubMed]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.-H.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007. [Google Scholar]
- Anand, M.; Antonidoss, A.; Balamanigandan, R.; Rahmath Nisha, S.; Gurunathan, K.; Bharathiraja, N. Resourceful Routing Algorithm for Mobile Ad-Hoc Network to Enhance Energy Utilization. Wirel. Pers. Commun. 2021. [Google Scholar] [CrossRef]
- Hu, T.S.; Fei, Y.S. QELAR: A Machine-Learning-Based Adaptive Routing Protocol for Energy-Efficient and Lifetime-Extended Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2010, 9, 796–809. [Google Scholar]
- Hao, K.; Shen, H.F.; Liu, Y.L.; Wang, B.B.; Du, X.J. Integrating Localization and Energy-Awareness: A Novel Geographic Routing Protocol for Underwater Wireless Sensor Networks. Mob. Netw. Appl. 2018, 23, 1427–1435. [Google Scholar] [CrossRef]
- Ge, L.; Jiang, S. An Efficient Opportunistic Routing Based on Prediction for Nautical Wireless Ad Hoc Networks. J. Mar. Sci. Eng. 2022, 10, 789. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. Geographic and Opportunistic Routing for Underwater Sensor Networks. IEEE Trans. Comput. 2016, 65, 548–561. [Google Scholar] [CrossRef]
- Wang, T.; Zhao, D.; Cai, S.; Jia, W.; Liu, A. Bidirectional Prediction-Based Underwater Data Collection Protocol for End-Edge-Cloud Orchestrated System. IEEE Trans. Ind. Inform. 2020, 16, 4791–4799. [Google Scholar] [CrossRef]
- Tilak, S.; Abu-Ghazaleh, N.B.; Heinzelman, W. A taxonomy of wireless micro-sensor network models. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2002, 6, 28–36. [Google Scholar] [CrossRef]
- Cutler, B.; Fowers, S.; Kramer, J.; Peterson, E.; Wang, D.L. Dunking the Data Center. IEEE Spectrum 2017, 54, 26–31. [Google Scholar] [CrossRef]
- Jin, Z.; Duan, C.; Yang, Q.; Su, Y. Q-learning-Based Opportunistic Routing with an on-site architecture in UASNs. Ad Hoc Netw. 2021, 119, 102553. [Google Scholar] [CrossRef]
- Bharathiraja, N.; Padmaja, P.; Rajeshwari, S.B.; Kallimani, J.S.; Buttar, A.M.; Lingaiah, T.B. Elite Oppositional Farmland Fertility Optimization Based Node Localization Technique for Wireless Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 5290028. [Google Scholar] [CrossRef]
- Teymorian, A.Y.; Cheng, W.; Ma, L.R.; Cheng, X.Z.; Lu, X.C.; Lu, Z.X. 3D Underwater Sensor Network Localization. IEEE Trans. Mob. Comput. 2009, 8, 1610–1621. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A Survey on MAC Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Zhang, J.; Cai, M.; Han, G.; Qian, Y.; Shu, L. Cellular Clustering-Based Interference-Aware Data Transmission Protocol for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 3217–3230. [Google Scholar] [CrossRef]
- Song, Y. Underwater Acoustic Sensor Networks With Cost Efficiency for Internet of Underwater Things. IEEE Trans. Ind. Electron. 2021, 68, 1707–1716. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.H.; Cui, J.H.; Zhou, S.L.; Yang, B. A Joint Time Synchronization and Localization Design for Mobile Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2016, 15, 530–543. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Loureiro, A.A.F. Modeling power control and anypath routing in underwater wireless sensor networks. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Li, Y. Reinforcement learning in practice: Opportunities and challenges. arXiv 2022, arXiv:2202.11296. [Google Scholar]
- Naeem, M.; Rizvi, S.T.H.; Coronato, A. A Gentle Introduction to Reinforcement Learning and its Application in Different Fields. IEEE Access 2020, 8, 209320–209344. [Google Scholar] [CrossRef]
- Su, Y.S.; Fan, R.; Fu, X.M.; Jin, Z.G. DQELR: An Adaptive Deep Q-Network-Based Energy- and Latency-Aware Routing Protocol Design for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 9091–9104. [Google Scholar] [CrossRef]
- Le, T.K.; Le, V.S.; Duc, D.D.; Ngoc, T.B.; Phuong, T.N.T. iK-means: An improvement of the iterative k-means partitioning algorithm. In Proceedings of the 12th International Conference on Knowledge and Systems Engineering (KSE), Can Tho City, Vietnam, 12–14 November 2020; pp. 300–305. [Google Scholar]
- Alsalman, L.; Alotaibi, E. A Balanced Routing Protocol Based on Machine Learning for Underwater Sensor Networks. IEEE Access 2021, 9, 152082–152097. [Google Scholar] [CrossRef]
- The Network Simulator-ns-3. Available online: http://www.nsnam.org (accessed on 10 January 2020).
- Gao, C.X.; Hu, W.W.; Chen, K.Y. Research on Multi-AUVs Data Acquisition System of Underwater Acoustic Communication Network. Sensors 2022, 22, 5090. [Google Scholar] [CrossRef]
- Kumar, P.; Chaturvedi, A. Fuzzy-interval based probabilistic query generation models and fusion strategy for energy efficient wireless sensor networks. Comput. Commun. 2018, 117, 46–57. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| R0 | the constant cost |
| Tdelay | The predefined maximum delay |
| C | The set of clusters |
| ni | the ith node |
| Neighbori | neighbors of ni |
| neighborij | The jth neighbor of ni |
| ni’s remaining energy | |
| ni’s initial energy | |
| Ti | The waiting time of ni before forwarding |
| Buffered packets of nj | |
| Er,Es | Energy for packet reception and transmission |
| Clj | The jth cluster |
| CH, PCH | Cluster head, potential cluster head |
| CR | Communication Range |
| Parameter | Value |
|---|---|
| Network size | 100 to 500 |
| Transmission power | 10 W |
| Receiving power | 3 W |
| Transmission rate | 1 kbps |
| Data packet size | 50 Bytes |
| Simulation rounds | 200 |
| Communication range | 1000 m, 1500 m |
| Idle power | 30 mW |
| Initial energy | 1000 J |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, R.; Huang, X.; Huang, X.; Li, D.; Yang, Q. An On-Site-Based Opportunistic Routing Protocol for Scalable and Energy-Efficient Underwater Acoustic Sensor Networks. Appl. Sci. 2022, 12, 12482. https://doi.org/10.3390/app122312482
Zhu R, Huang X, Huang X, Li D, Yang Q. An On-Site-Based Opportunistic Routing Protocol for Scalable and Energy-Efficient Underwater Acoustic Sensor Networks. Applied Sciences. 2022; 12(23):12482. https://doi.org/10.3390/app122312482
Chicago/Turabian StyleZhu, Rongxin, Xiwen Huang, Xiangdang Huang, Deshun Li, and Qiuling Yang. 2022. "An On-Site-Based Opportunistic Routing Protocol for Scalable and Energy-Efficient Underwater Acoustic Sensor Networks" Applied Sciences 12, no. 23: 12482. https://doi.org/10.3390/app122312482
APA StyleZhu, R., Huang, X., Huang, X., Li, D., & Yang, Q. (2022). An On-Site-Based Opportunistic Routing Protocol for Scalable and Energy-Efficient Underwater Acoustic Sensor Networks. Applied Sciences, 12(23), 12482. https://doi.org/10.3390/app122312482