
AUV Drift Track Prediction Method Based on a Modified Neural Network


Abstract
:1. Introduction
2. Materials and Methods
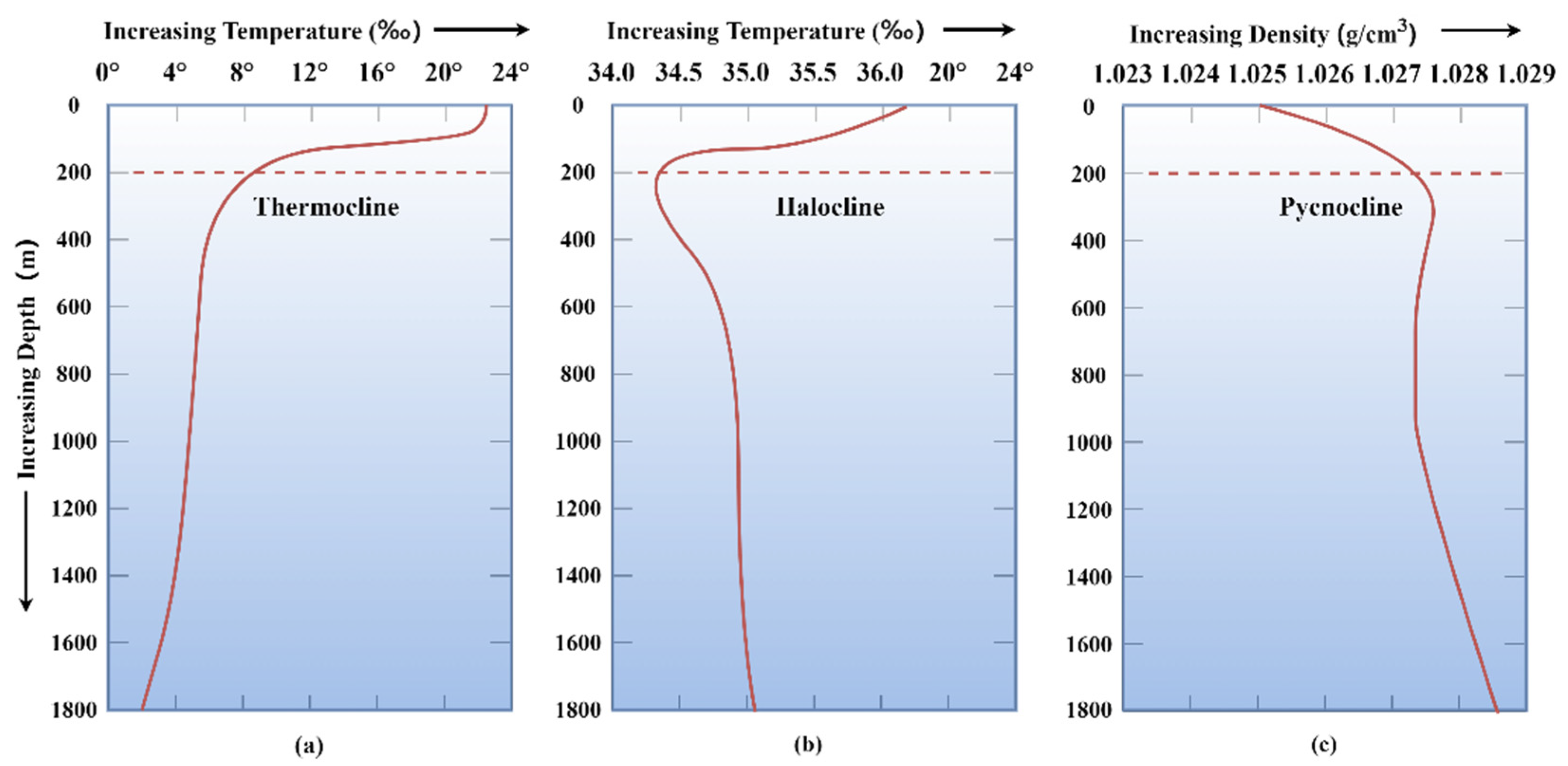
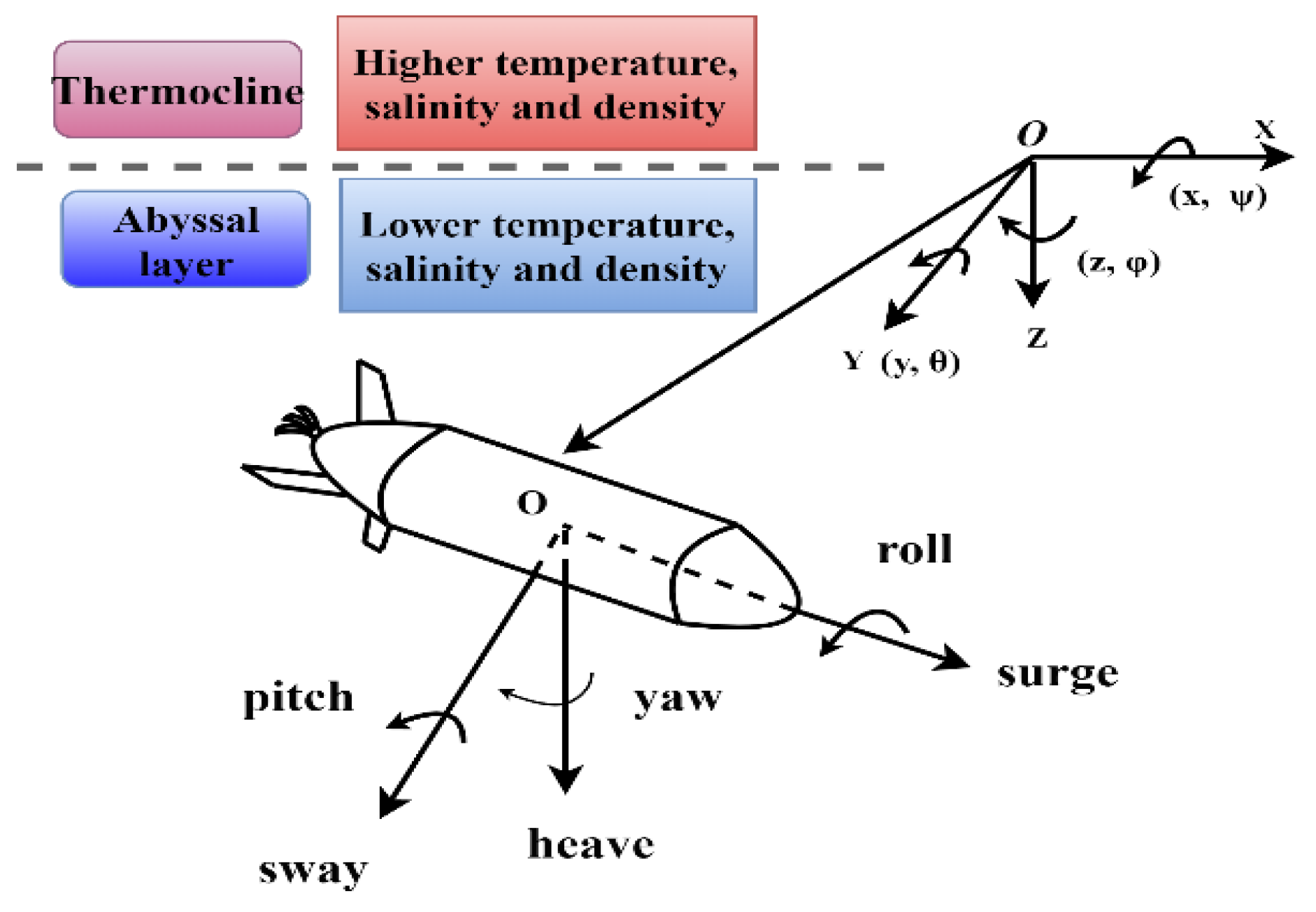
2.1. Problem Description
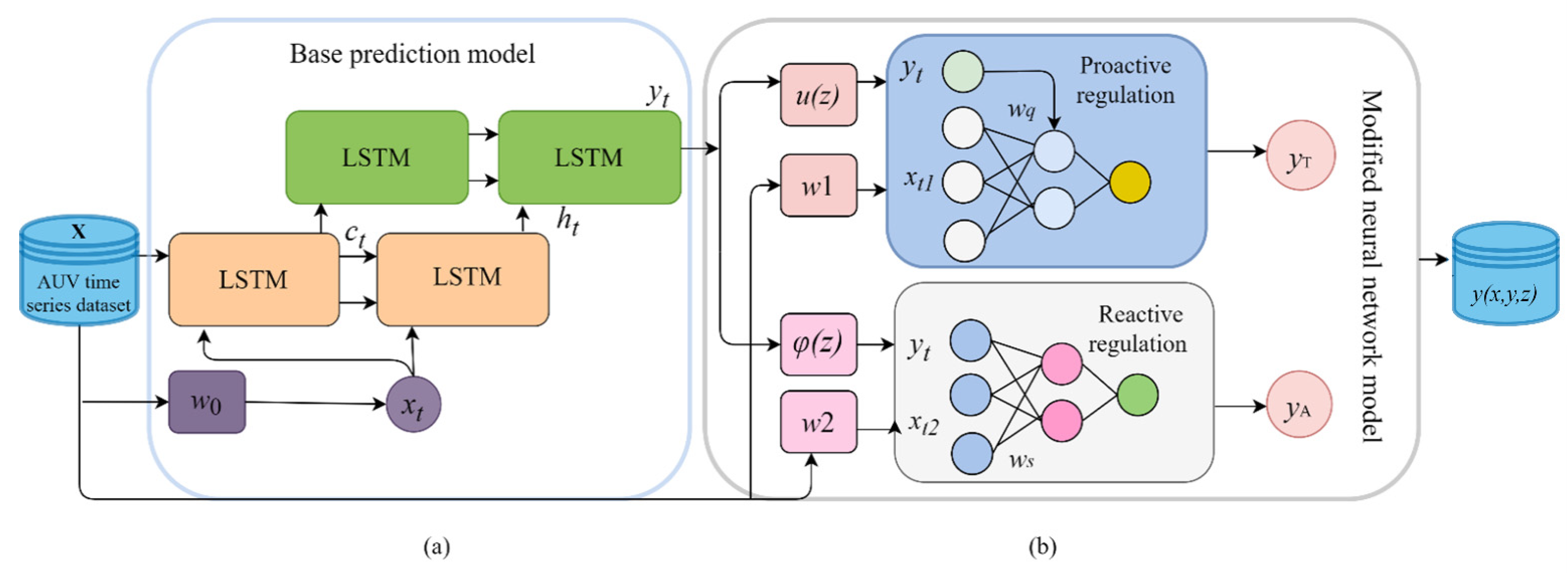
2.2. The Framework of AUV Drift Track Prediction
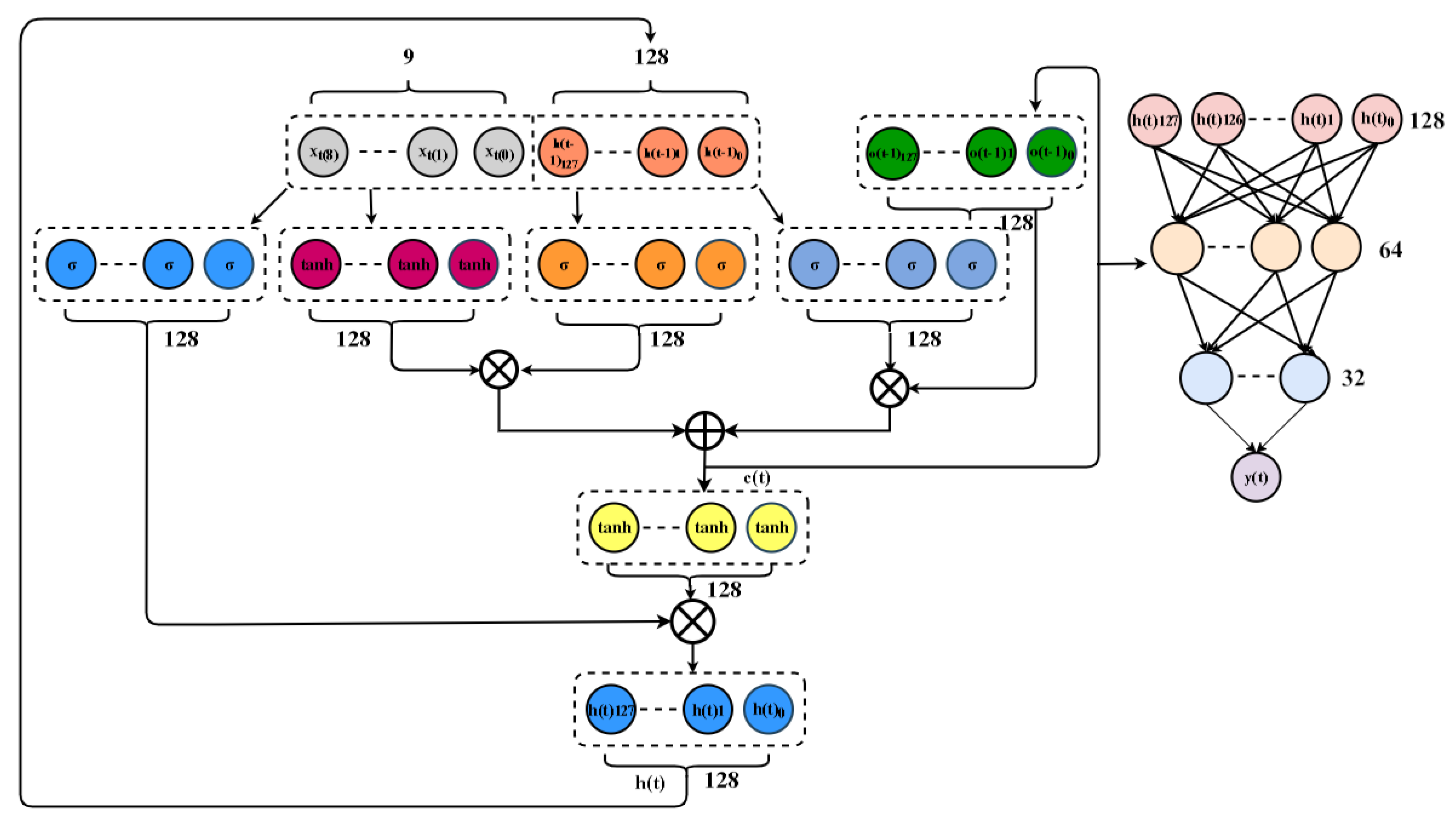
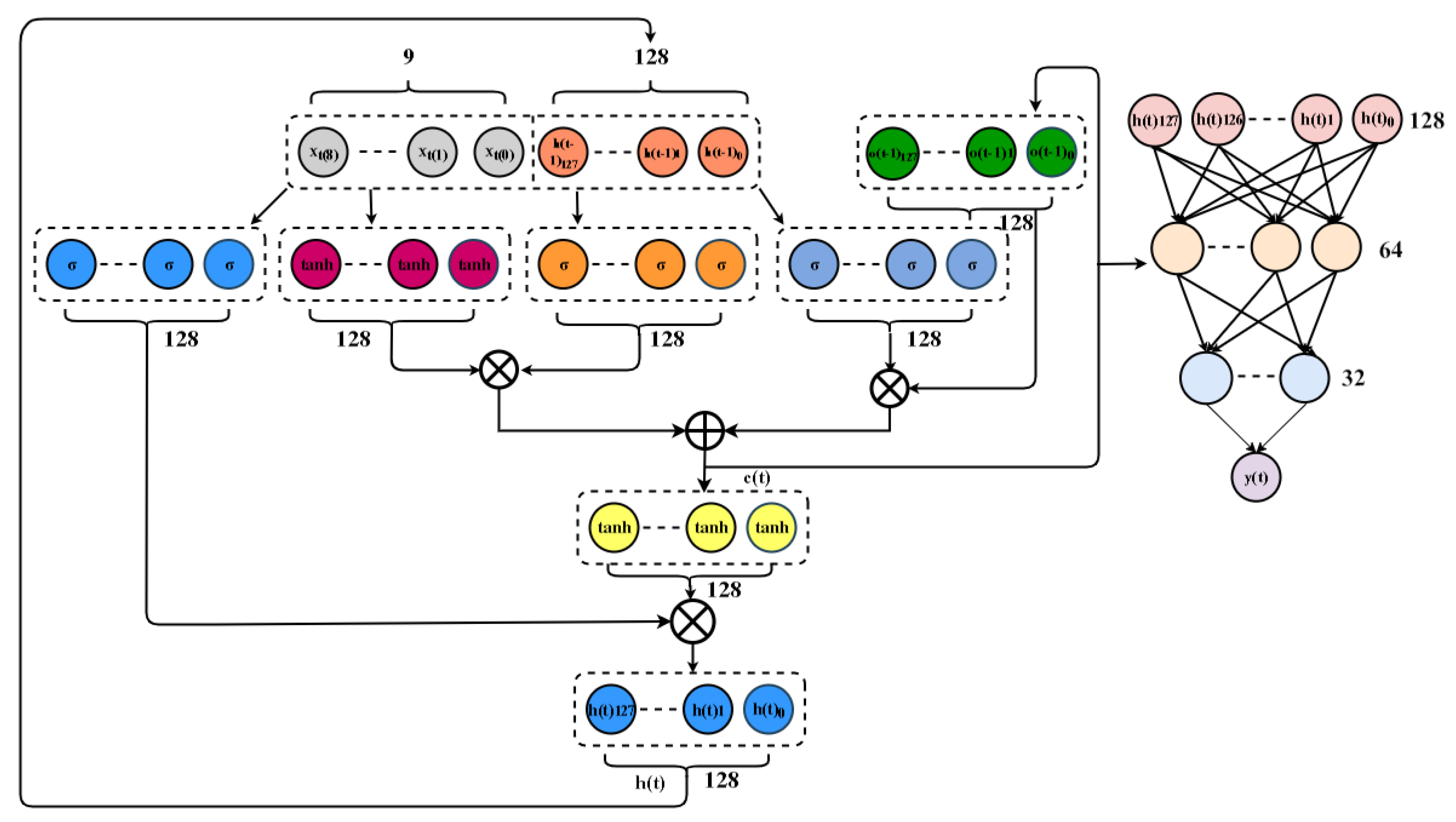
2.3. The Prediction Model of ECRNet
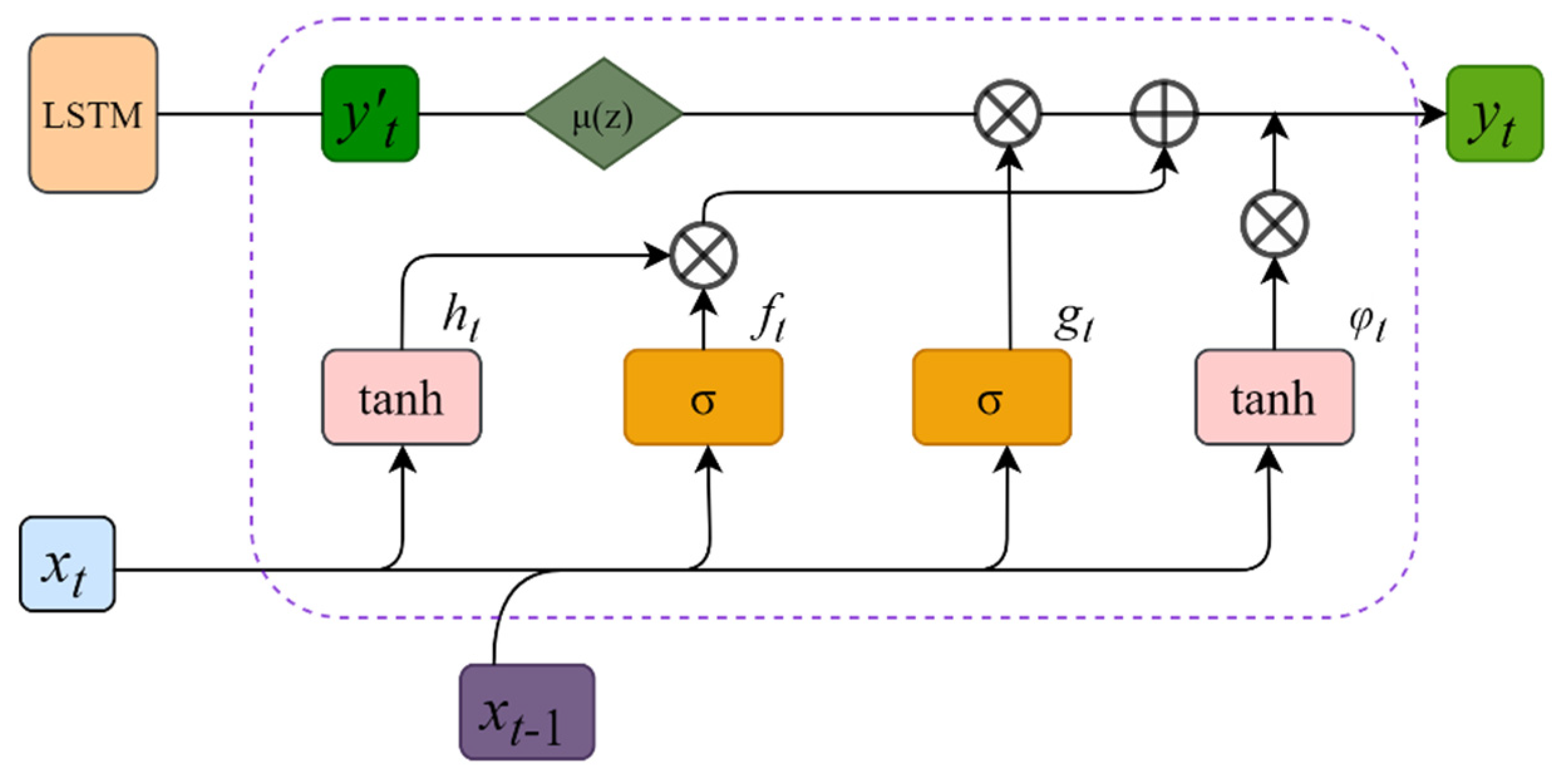
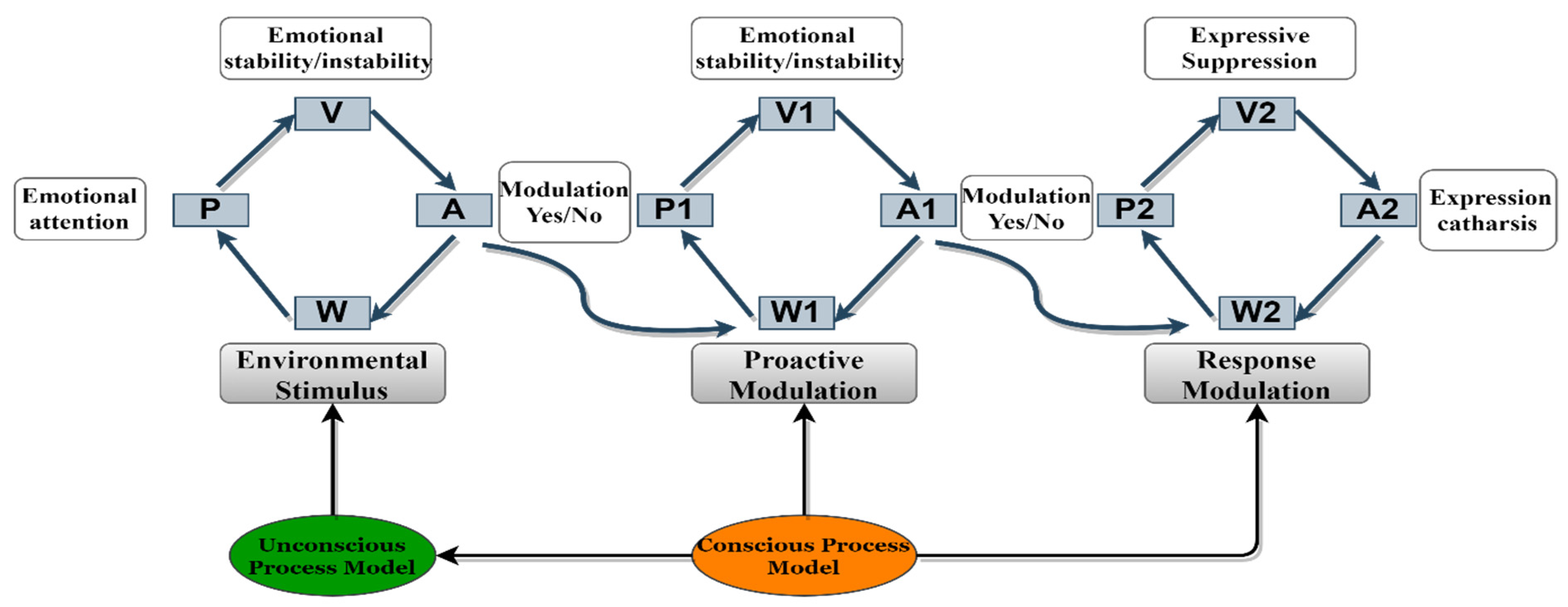
2.3.1. Emotion Modulation Mechanism
2.3.2. Modified Neural Network
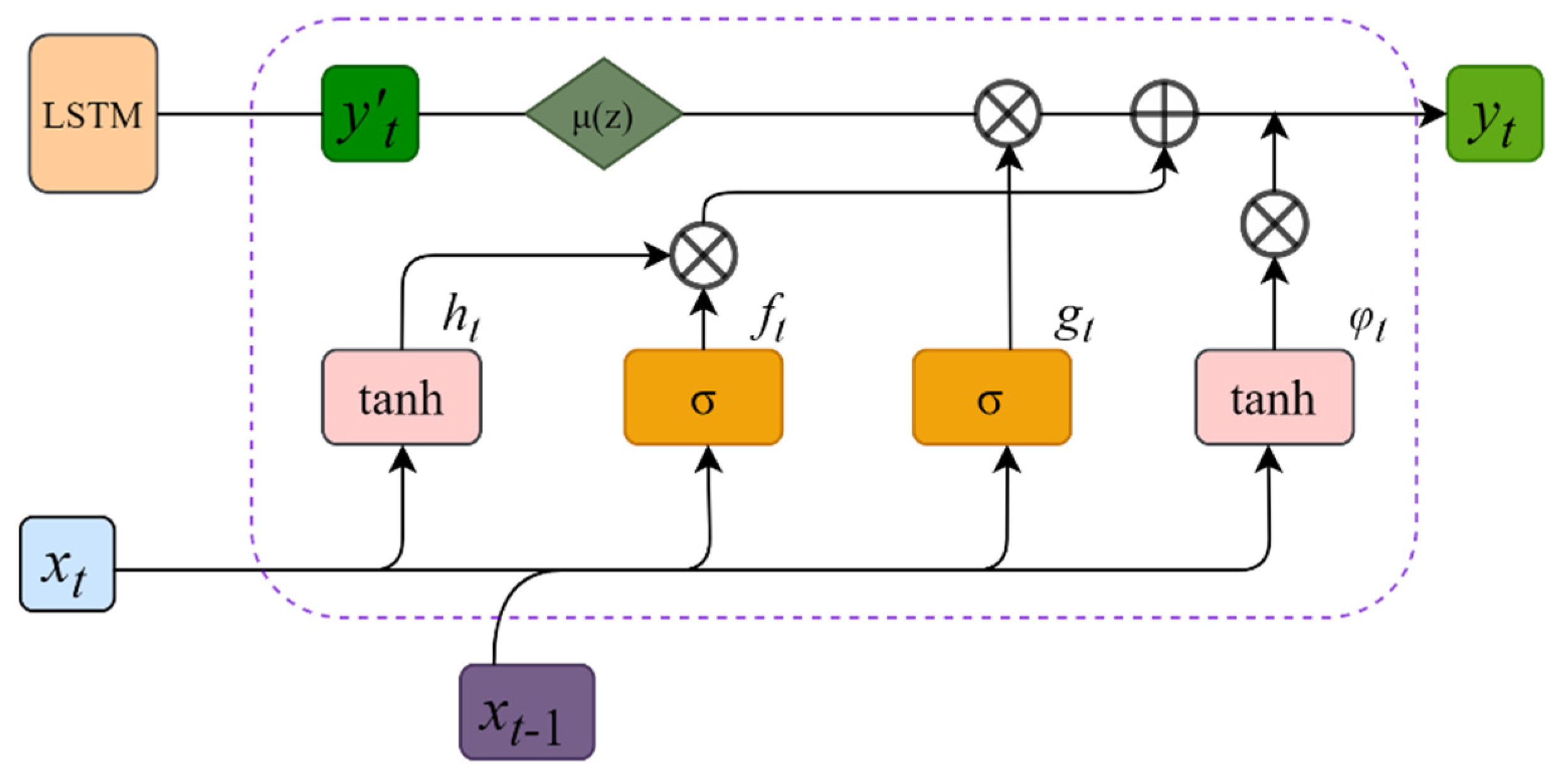
- Proactive Modulation Module
- 2.
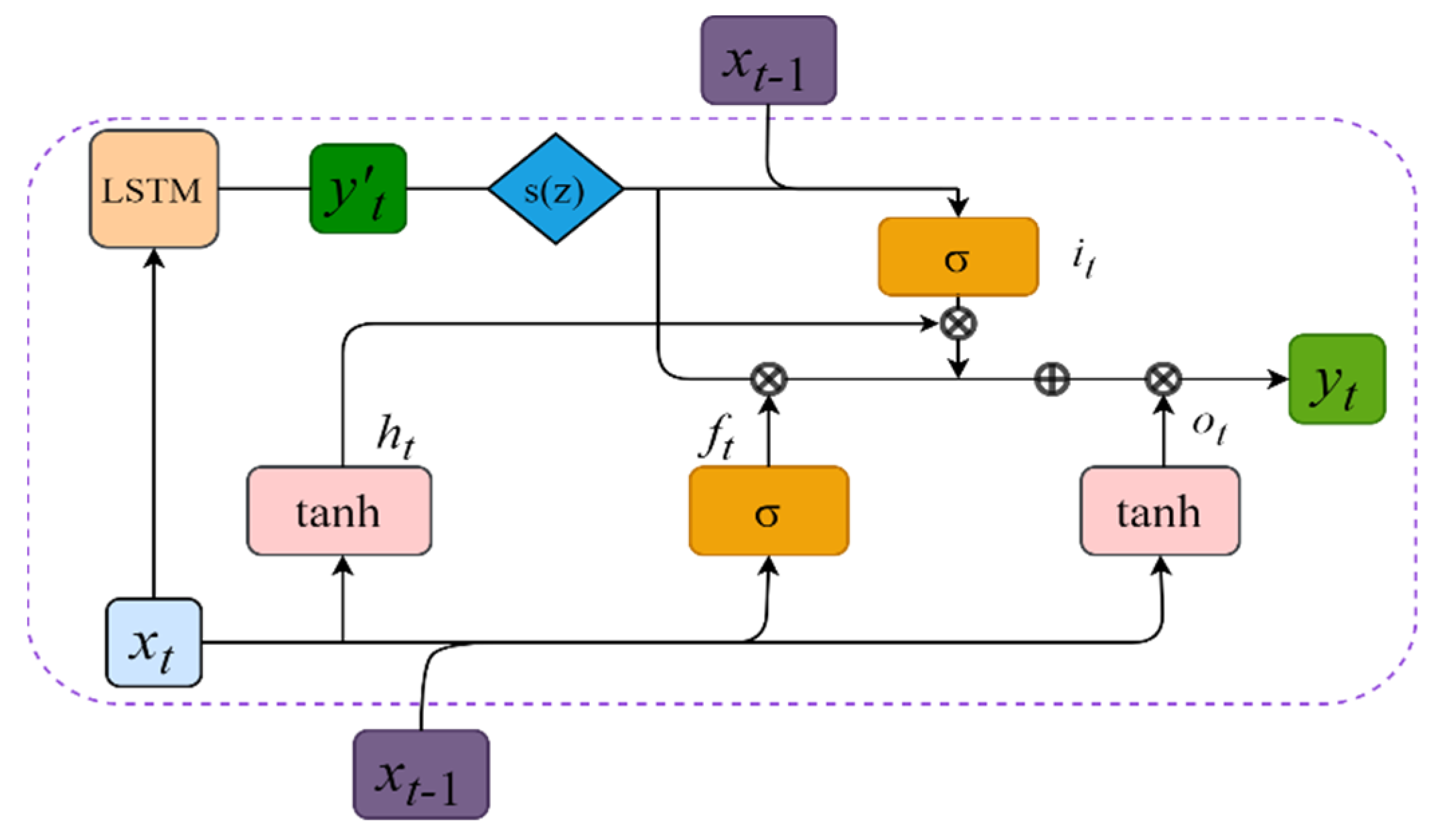
- Response Modulation Module

3. Experiments and Results
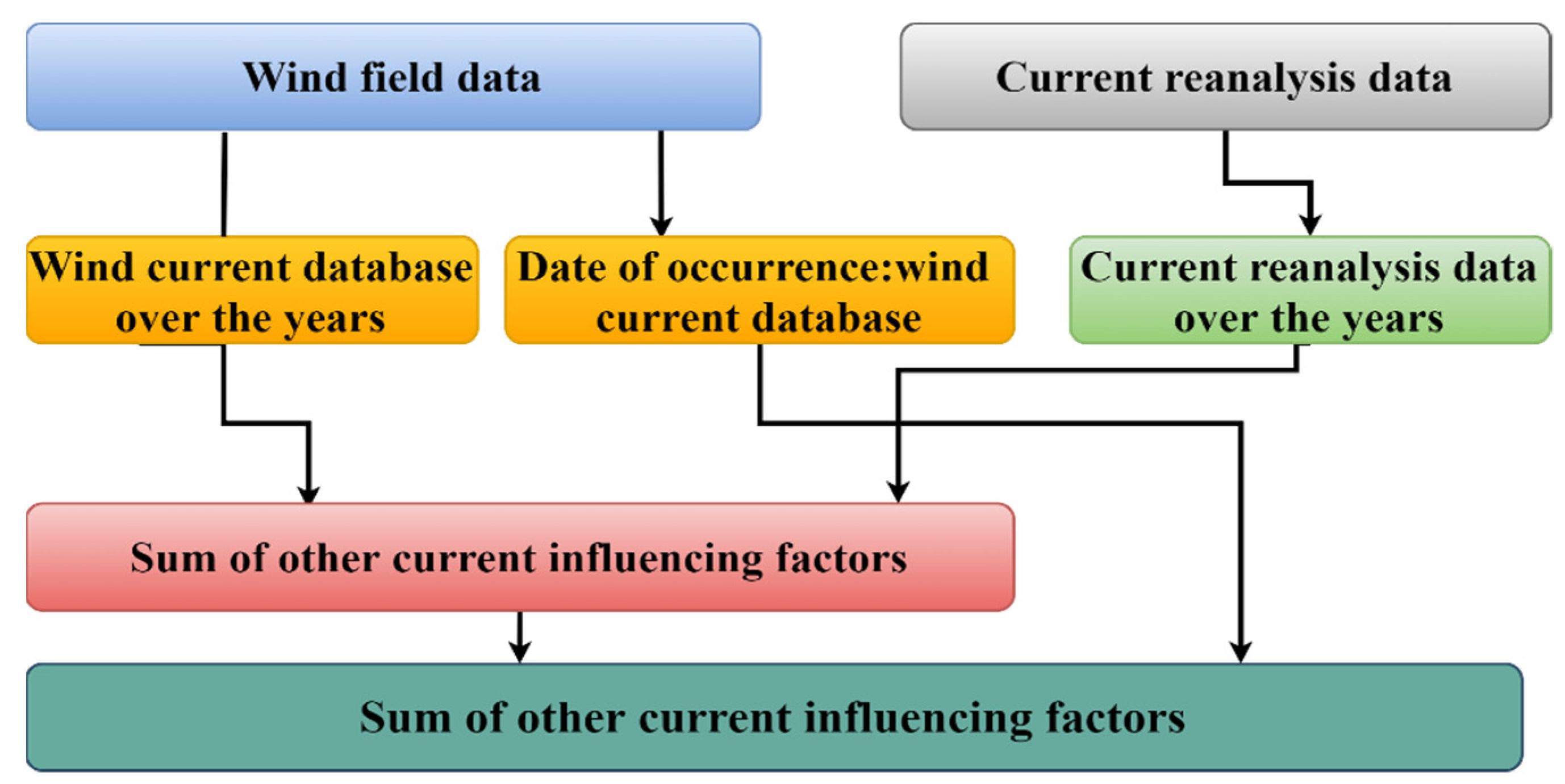
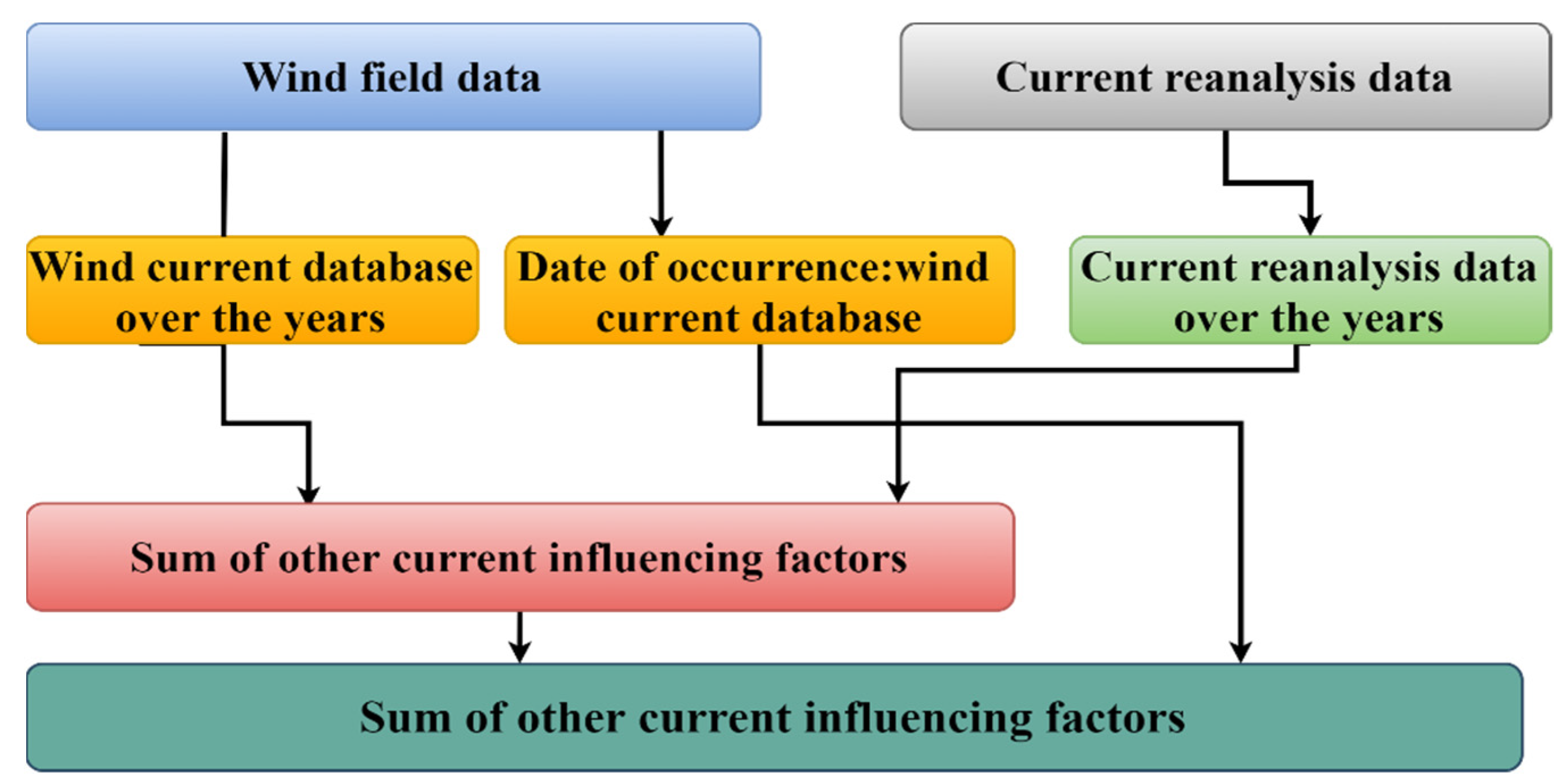
3.1. Data Processing
- Mean square error (MSE) describes the mean square error between the predicted and actual values in three dimensions:
- Root means square error (RMSE) is the square root of the difference between the predicted value and the actual value in three dimensions:
- Mean absolute error (MAE) is the average of the absolute differences between the predicted and actual values.
- Relative error (RE) reflects the deviation of the measured value from the true value and can better reflect the credibility of the measurement:
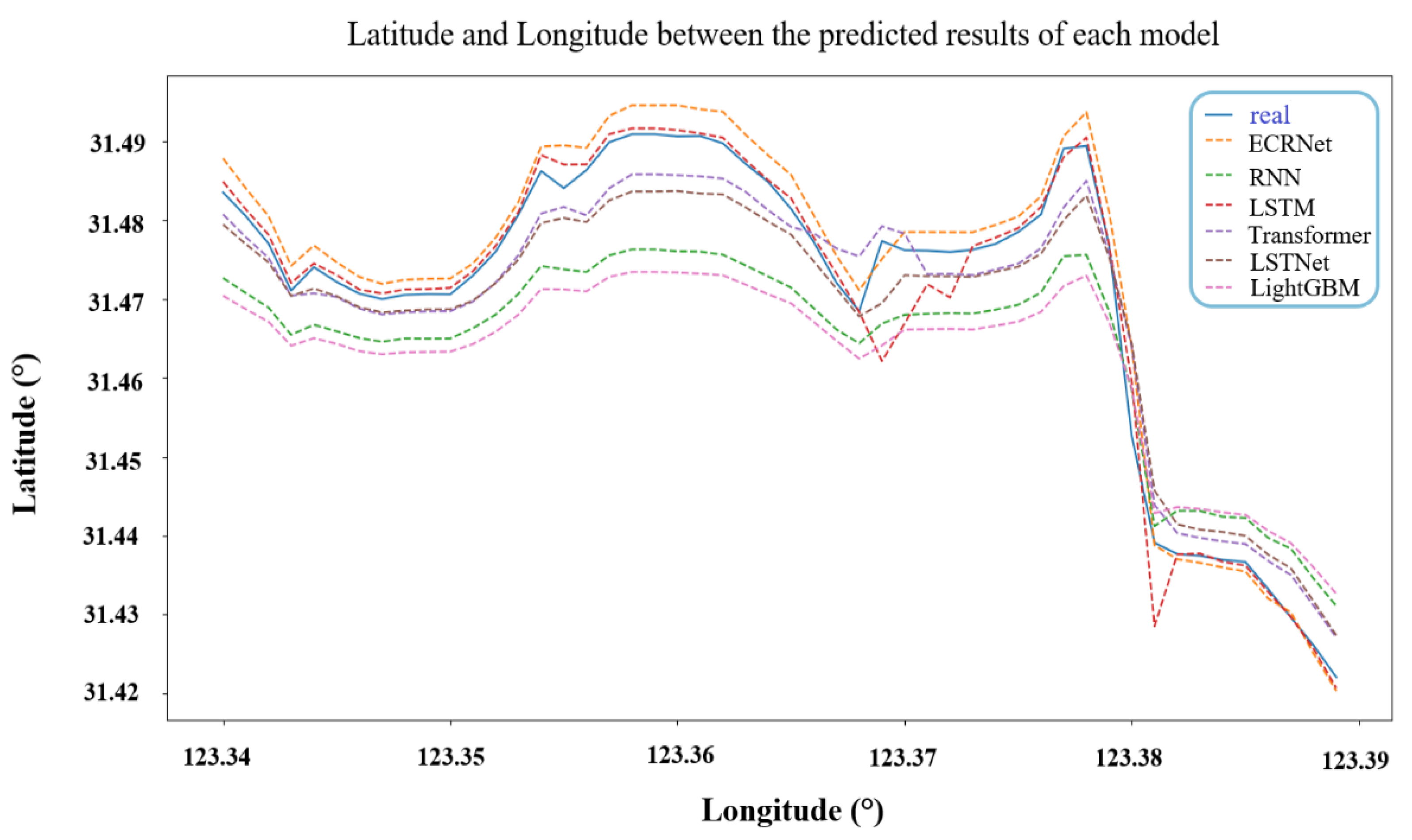
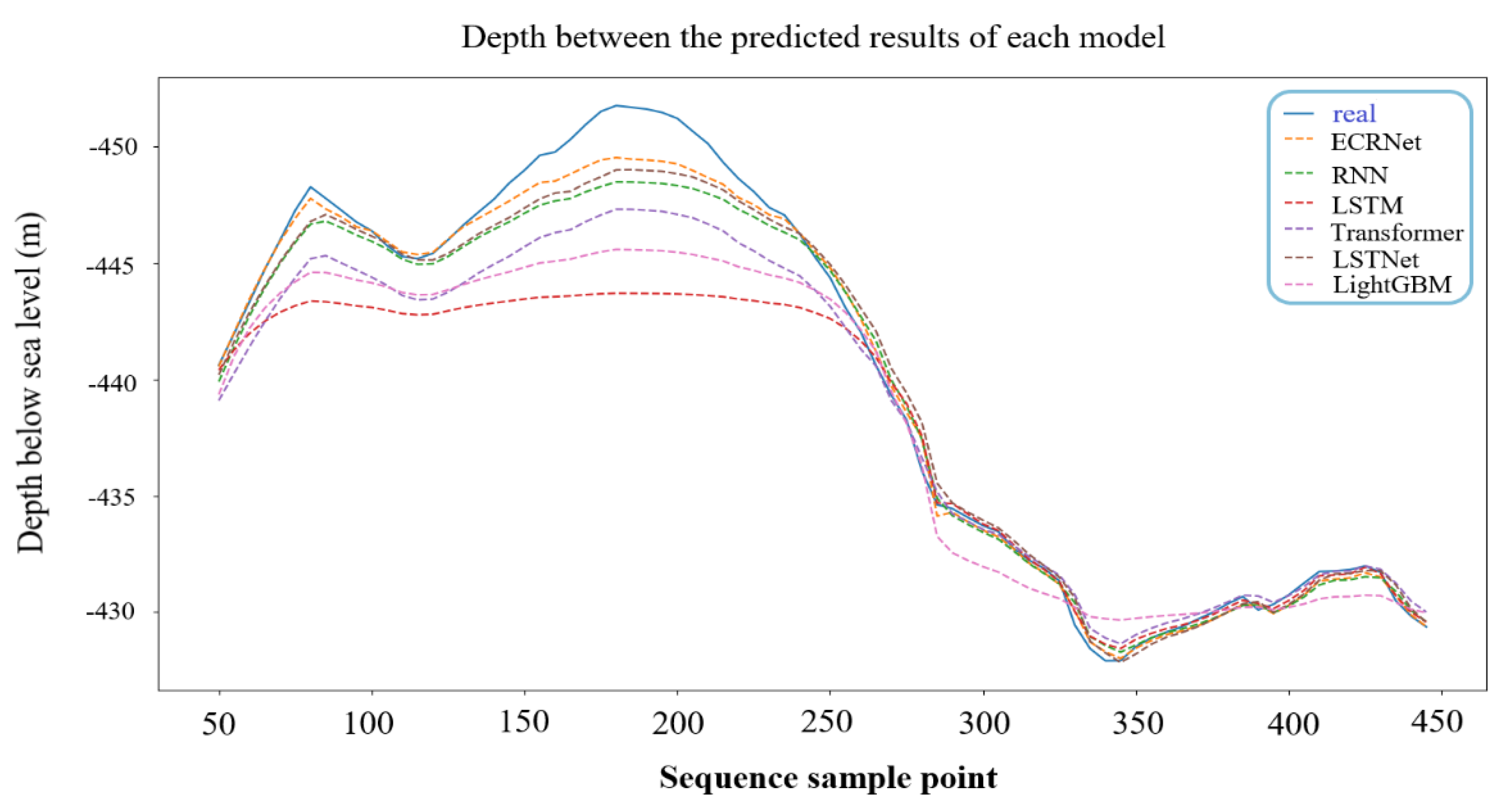
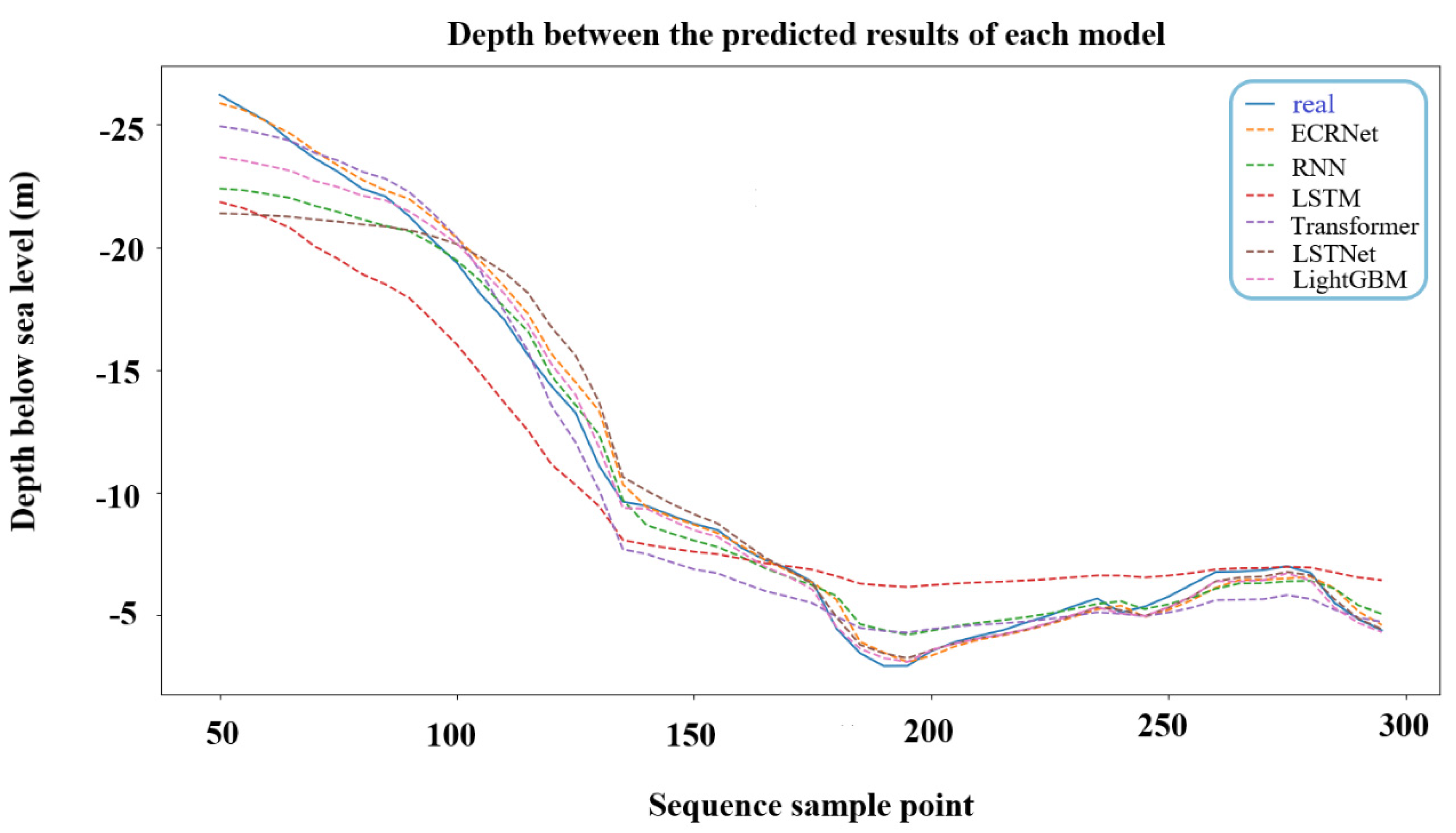
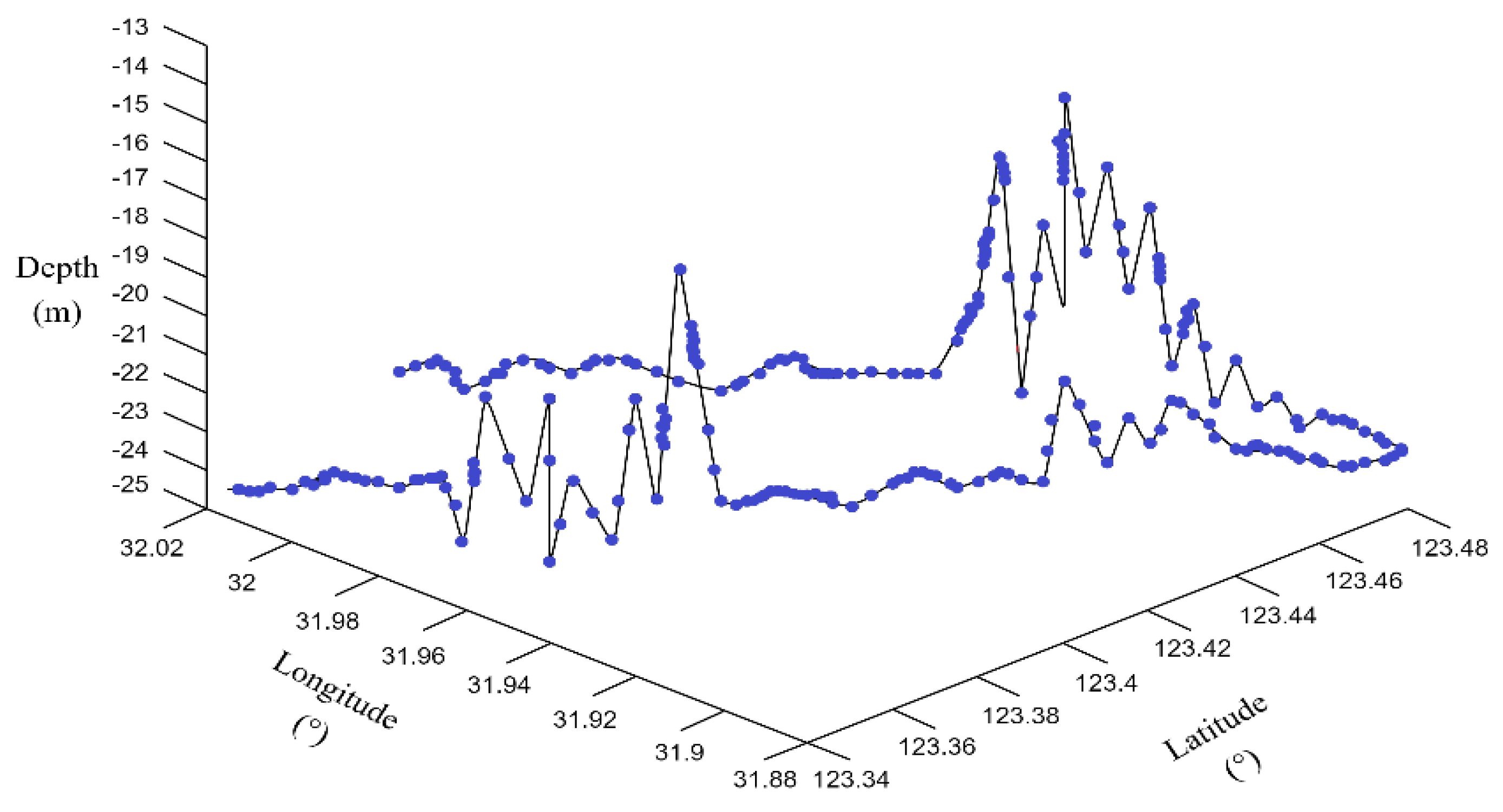
3.2. Experimental Analysis
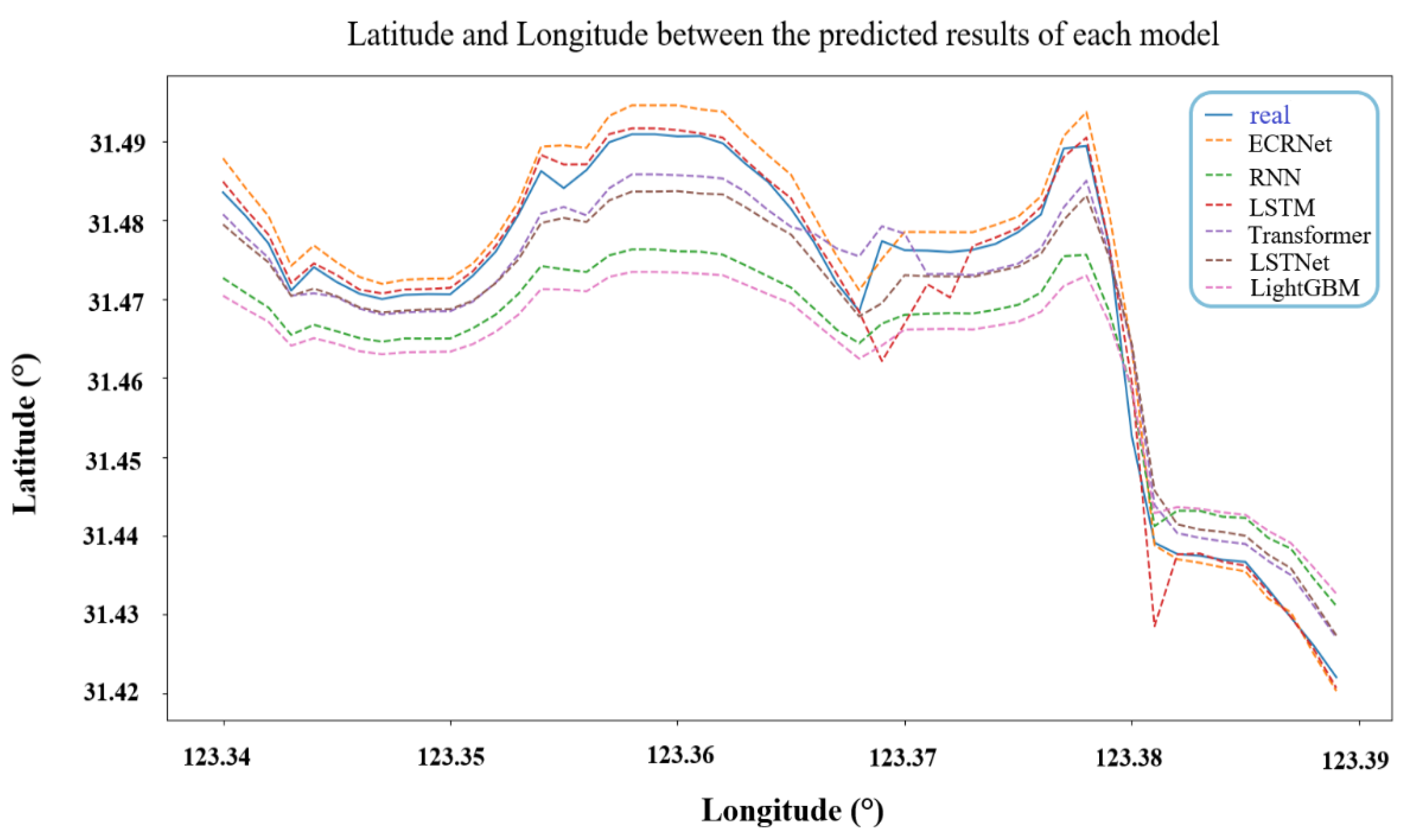
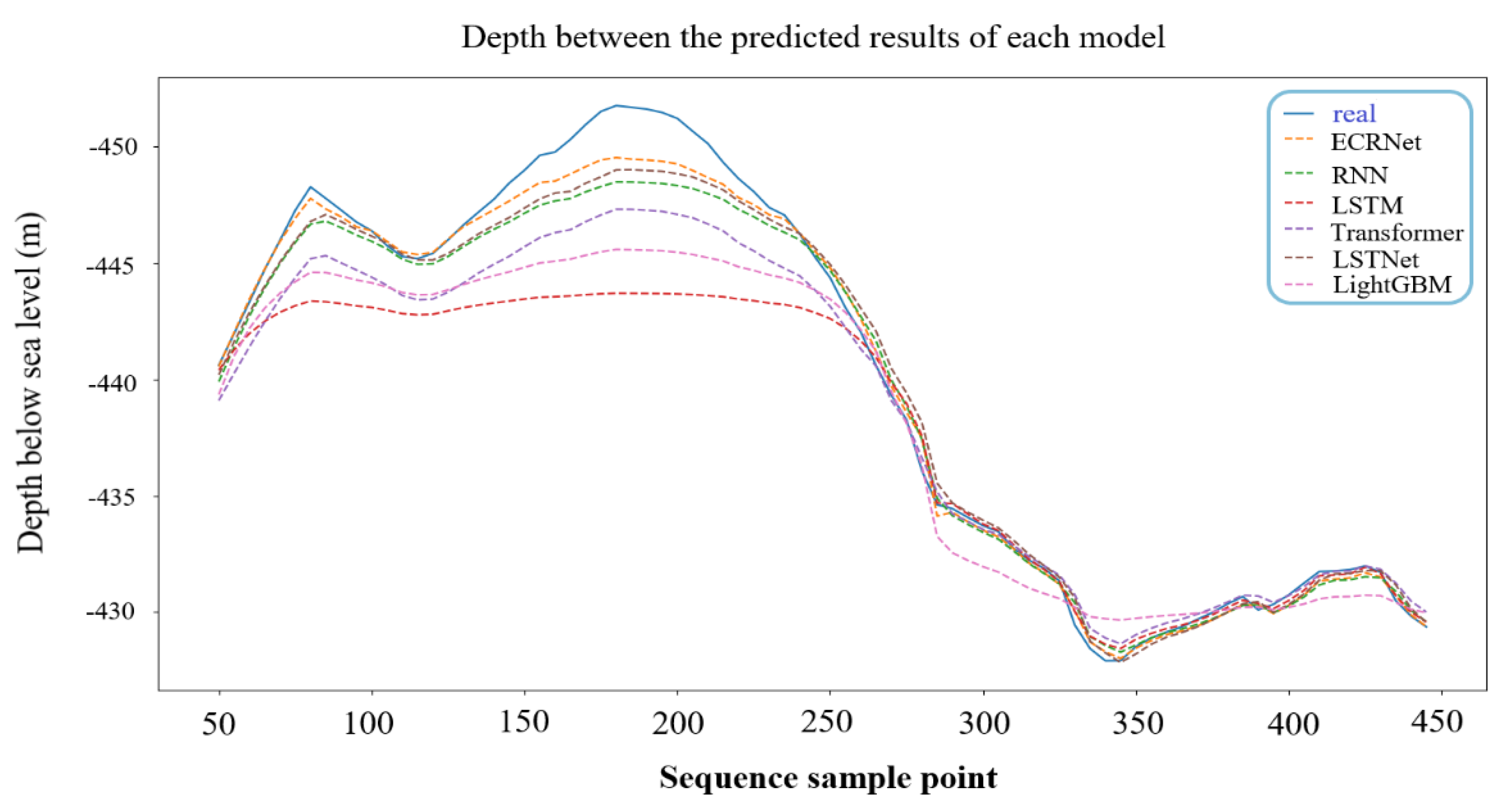
- Prediction results of drift track of models in the deep ocean layer
- 2.
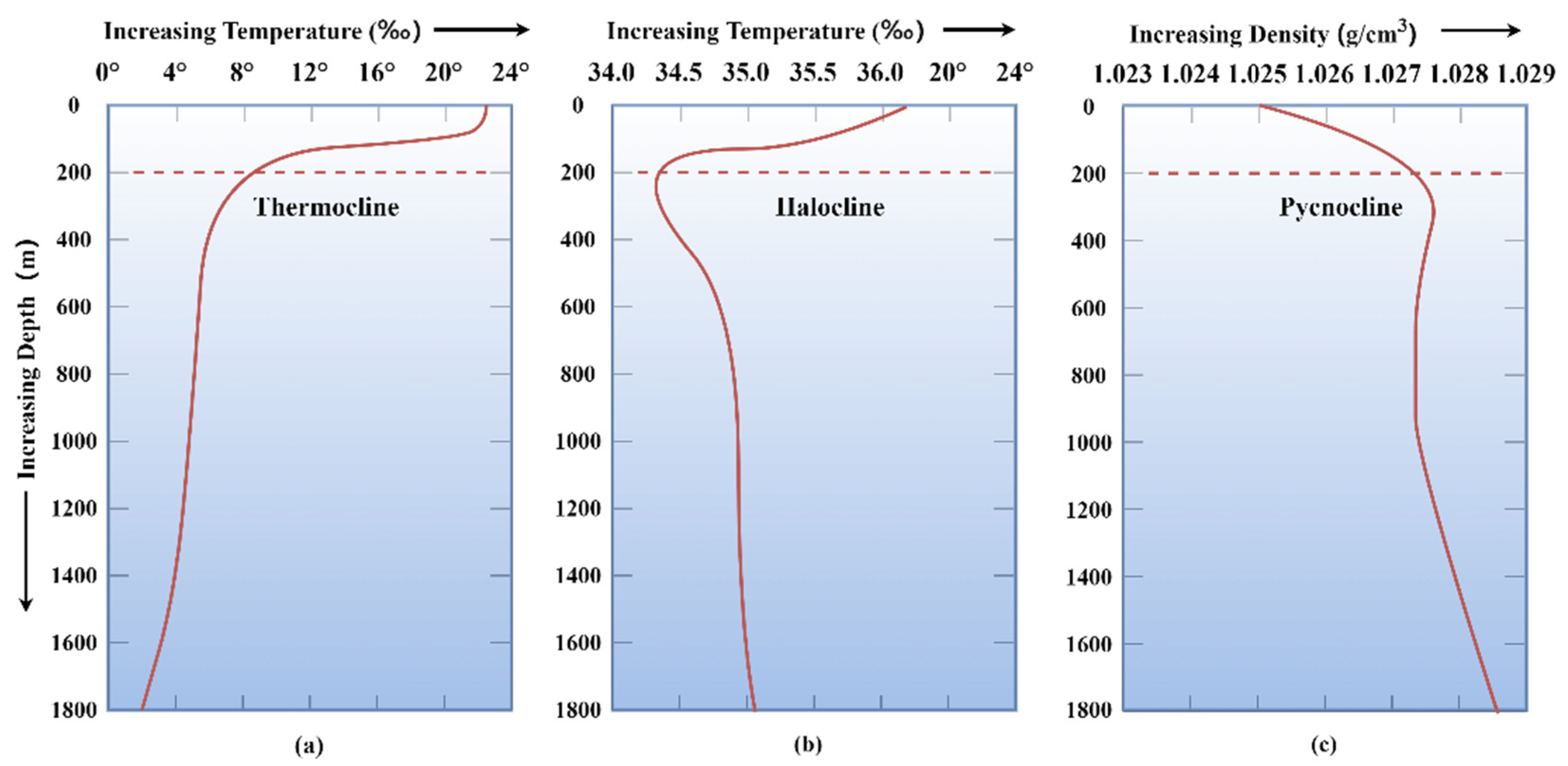
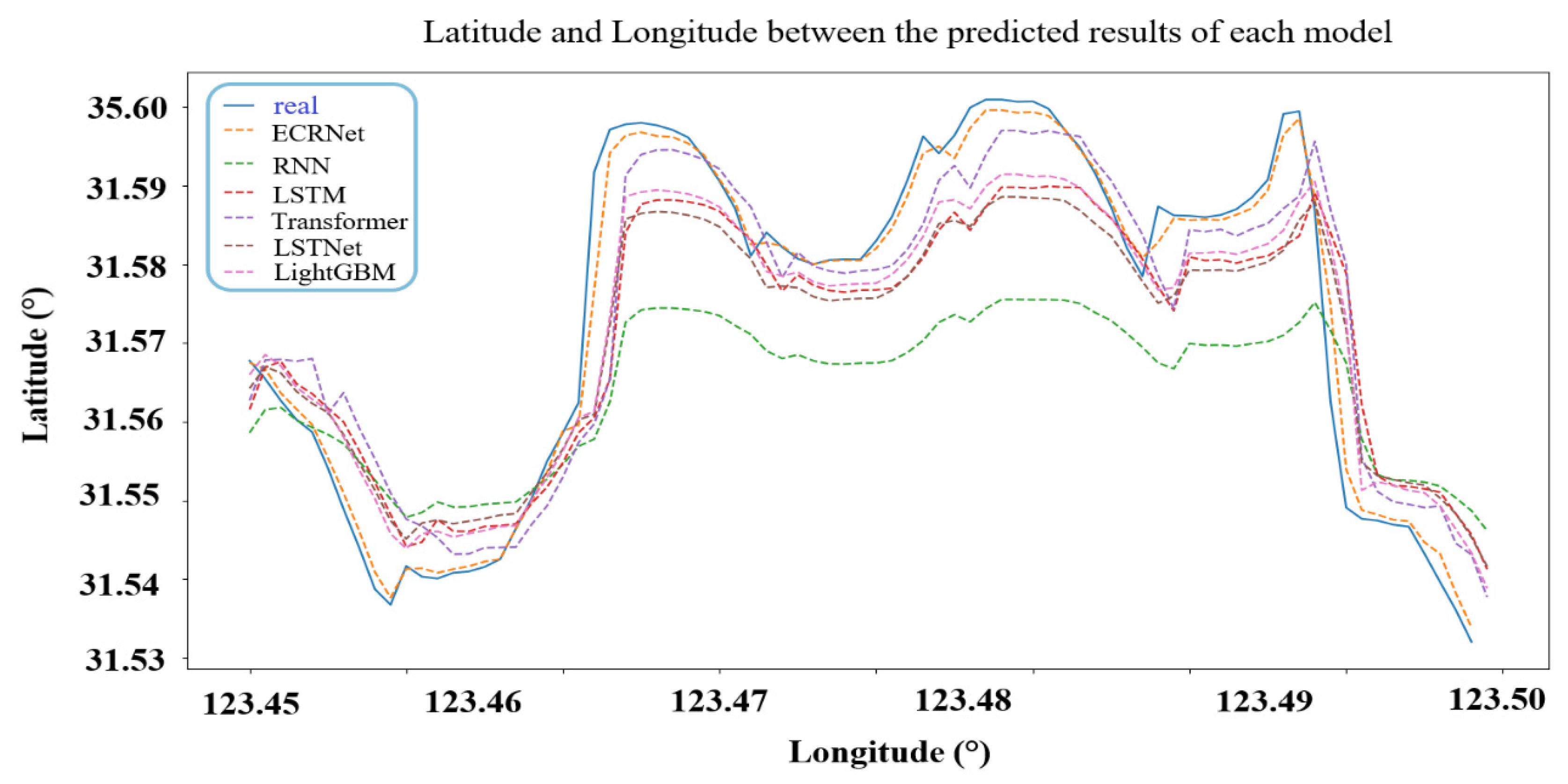
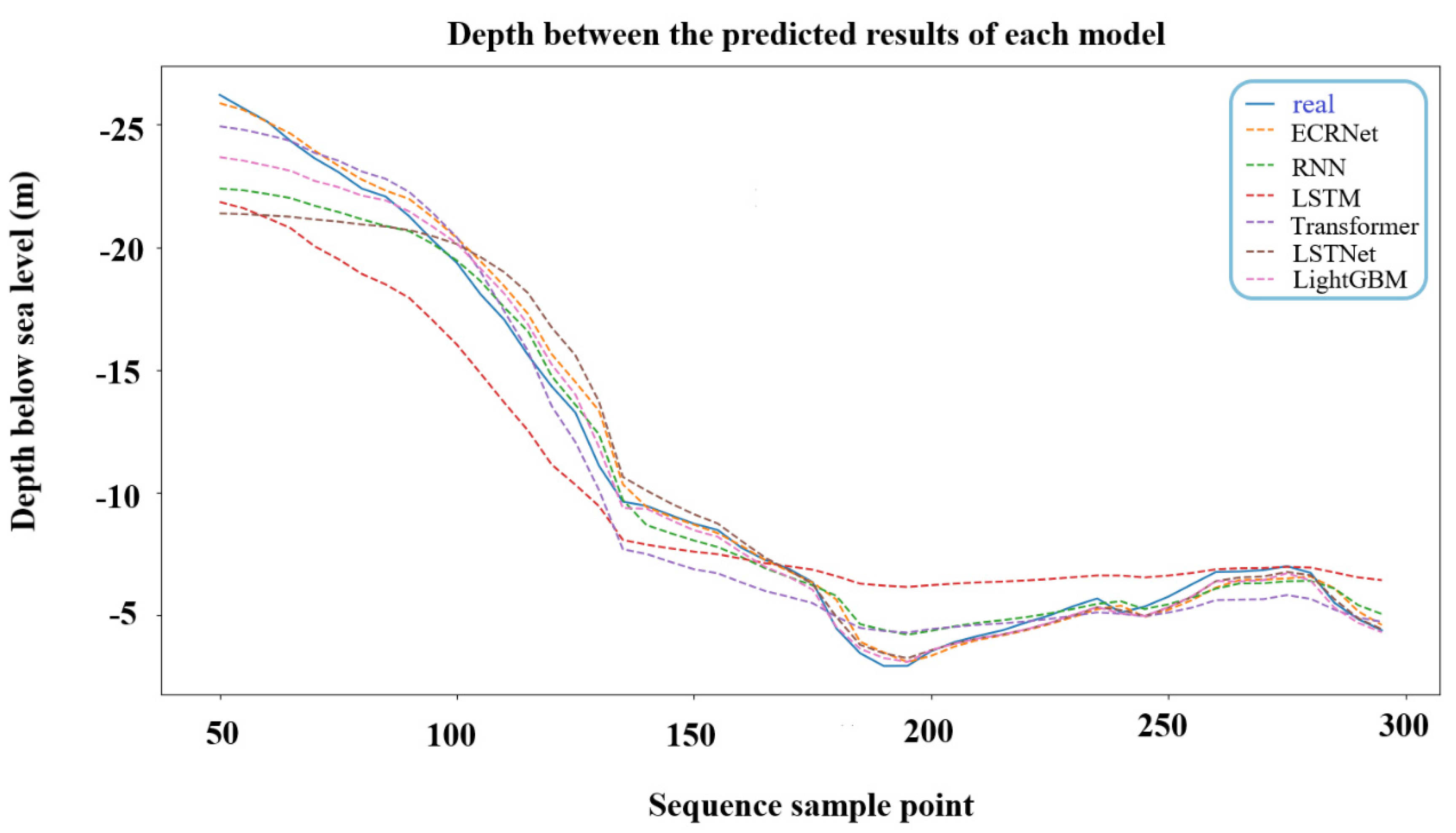
- Prediction results of drift track of models in the thermocline
4. Discussion
- The modified neural network establishes two different correction modules of Proactive Modulation and Response Modulation by imitating two strategies of people to regulate emotional fluctuations. The prediction errors caused by feature drift when the AUV drifts to the deep ocean layer and thermocline are corrected respectively.
- The modified neural network realizes the continuity of prediction results and the ability of sustainable learning of the model to a certain extent through different activation functions, selection weights, and different modified strategies.
- The modified neural network reduces computation in the time dimension, and the model structure is simpler for more accurate and faster training and prediction.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tanakitkorn, K.; Wilson, P.A.; Turnock, S.R.; Phillips, A.B. Depth control for an over-actuated, hover-capable autonomous underwater vehicle with experimental verification. Mechatronics 2017, 41, 67–81. [Google Scholar] [CrossRef]
- Corradini, M.L.; Orlando, G. A robust observer-based fault tolerant control scheme for underwater vehicles. J. Dyn. Syst. Meas. Control 2014, 136, 034504. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Y.; Zhang, J. An Algorithm for ocean Ice Drift Retrieval Based on Trend of Ice Drift Constraints from Sentinel-1 SAR Data. J. Coast. Res. 2020, 102, 113–126. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Rogers, E.; Wang, Y.; Yao, F. Terminal sliding mode-based tracking control with error transformation for underwater vehicles. Int. J. Robust Nonlinear Control 2021, 31, 7186–7206. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Fixed-time sliding mode formation control of AUVs based on a disturbance observer. IEEE/CAA J. Autom. Sin. 2020, 7, 539–545. [Google Scholar] [CrossRef]
- Michael, K.B. Real-Time Modeling of Cross-Body Flow for Torpedo Tube Recovery of the Phoenix Autonomous Underwater Vehicle (auv); Naval Postgraduate School: Monterey, CA, USA, 1998. [Google Scholar]
- Gabl, R.; Davey, T.; Cao, Y.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.; Ingram, D. Experimental force data of a restrained ROV under waves and current. Data 2020, 5, 57. [Google Scholar] [CrossRef]
- Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.; et al. Hydrodynamic loads on a restrained ROV under waves and current. Ocean. Eng. 2021, 234, 109279. [Google Scholar] [CrossRef]
- Klamo, J.T.; Yeager, K.I.; Cool, C.Y.; Turner, T.M.; Kwon, Y.W. The Effects of Cross-Sectional Geometry on Wave-Induced Loads for Underwater Vehicles. IEEE J. Ocean. Eng. 2020, 46, 765–784. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L. Real-Time Disturbances Estimating and Compensating of Nonlinear Dynamic Model for Underwater Vehicles. Math. Probl. Eng. 2018, 2018, 5760841. [Google Scholar] [CrossRef]
- Walker, K.L.; Gabl, R.; Aracri, S.; Cao, Y.; Stokes, A.A.; Kiprakis, A.; Giorgio-Serchi, F. Experimental Validation of Wave Induced Disturbances for Predictive Station Keeping of a Remotely Operated Vehicle. IEEE Robot. Autom. Lett. 2021, 6, 5421–5428. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Adaptive disturbance observer for trajectory tracking control of underwater vehicles. Ocean. Eng. 2020, 200, 107080. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, H.; Wang, N.; Guo, C.; Lu, T. Accurate track control of unmanned underwater vehicle under complex disturbances. China Ship Res. 2022, 17, 11. [Google Scholar]
- Li, J.; Ming, K.; Farouk, N.; Xing-hua, C. Horizontal Plane Motion Control of AUV Based on Active Disturbance Rejection Controller. In Proceedings of the 27th Chinese Control and Decision Conference (CCDC), Qingdao, China, 6 November 2015. [Google Scholar]
- Cao, X.; Wei, Y.; Heng, H.; Shen, Z. Dynamic surface backstepping trajectory tracking control of unmanned underwater vehicles with ocean current disturbances. Syst. Eng. Electron. Technol. 2021, 43, 1664–1672. [Google Scholar]
- Hu, Y.; Liu, P.; Liu, Y. Ocean Stratification during the “Silent One Billion Years” Period. In Proceedings of the 34th Annual Meeting of the Chinese Meteorological Society (CCMS), Zhengzhou, China, 26–30 September 2017. [Google Scholar]
- Peng, H. The Thermocline Changes in the South China Ocean and Its Response to ENSO. Master’s Thesis, Xiamen University, Xiamen, China, 2017. [Google Scholar]
- Jiang, Y.; Li, Y.; Wang, Y.; Cao, J.; Li, Y.; Sun, Y.; Yin, Y.; Zhang, S. Gravity and buoyancy calculation of deep underwater robot in the whole ocean. J. Harbin Eng. Univ. 2020, 41, 6. [Google Scholar]
- Huthnance, J.M.; Inall, M.E.; Fraser, N.J. Oceanic Density/Pressure Gradients and Slope Currents. J. Phys. Oceanogr. 2020, 50, 1643–1654. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Zhao, B. Basic characteristics and formation mechanism of strong thermocline in the Bohai Sea, Yellow Sea and northern East China Sea. J. Oceanogr. 1989, 11, 10. [Google Scholar]
- Ghanbari, R.; Borna, K. Multivariate Time-Series Prediction Using LSTM Neural Networks. In Proceedings of the 2021 26th International Computer Conference, Computer Society of Iran (CSICC), Tehran, Iran, 3–4 March 2021. [Google Scholar]
- Liu, X. Preliminary Study on the Variation Law of Gravity Acceleration around the Earth. New Course 2017, 12, 120. [Google Scholar]
- Ji, W. Hydrodynamic study of sea surface drag coefficient. Ocean. Technol. 2002, 21, 4. [Google Scholar]
- Li, W.; Deng, S.; Duan, Y.; Du, S. Time Series Forecasting and Deep Learning: Literature Review and Application Examples. Comput. Appl. Softw. 2020, 37, 62–70. [Google Scholar]
- Zhu, C.; Jiang, Y.; Wang, Y.; Liu, D.; Luo, W. Arithmetic performance is modulated by cognitive reappraisal and expression suppression: Evidence from behavioral and ERP findings. Neuropsychologia 2021, 162, 108060. [Google Scholar] [CrossRef] [PubMed]
- Berboth, S.; Morawetz, C. Amygdala-prefrontal connectivity during emotion Modulation: A meta-analysis of psychophysiological interactions. Neuropsychologia 2021, 153, 107767. [Google Scholar] [CrossRef] [PubMed]
- Altmann, A.; Toloşi, L.; Sander, O.; Lengauer, T. Permutation importance: A corrected feature importance measure. Bioinformatics 2010, 26, 1340–1347. [Google Scholar] [CrossRef] [PubMed]
- Lai, G.; Chang, W.C.; Yang, Y.; Liu, H. Modeling Long- and Short-Term Temporal Patterns with Deep Neural Networks. In Proceedings of the 41st International ACM SIGIR Conference on Research & Development in Information Retrieval, Ann Arbor, MI, USA, 18 April 2018. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 12 June 2017. [Google Scholar]
- Wang, J.; Li, X.; Li, J.; Sun, Q. NGCU: A New RNN Model for Time-Series Data Prediction. Big Data Res. 2022, 27, 100296. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T. LightGBM: A Highly Efficient Gradient Boosting Decision Tree. Neural Inf. Process. Syst. 2017, 30, 3149–3157. [Google Scholar]
- National Marine Data Center. Available online: http://mds.nmdis.org.cn/ (accessed on 5 June 2021).
- National Meteorological Science Data Center. Available online: https://data.cma.cn/ (accessed on 5 June 2021).
- Taqi, A.M.; Al-Subhi, A.M.; Alsaafani, M.A.; Abdulla, C.P. Estimation of geostrophic current in the Red Sea based on sea level anomalies derived from extended satellite altimetry data. Ocean. Sci. 2019, 15, 477–488. [Google Scholar] [CrossRef]
- Xu, T.; Cao, Y. Numerical simulation of oceansonal variation of ocean circulation in the South China ocean. Coast. Eng. 2017, 36, 62–71. [Google Scholar]
- Gómez-Orellana, A.M.; Fernández, J.C.; Dorado-Moreno, M.; Gutiérrez, P.A.; Hervás-Martínez, C. Building Suitable Datasets for Soft Computing and Machine Learning Techniques from Meteorological Data Integration: A Case Study for Predicting Significant Wave Height and Energy Flux. Energies 2021, 14, 468. [Google Scholar] [CrossRef]
- Izaguirre, C.; Méndez, F.J.; Menéndez, M.; Losada, I.J. Global extreme wave height variability based on satellite data. Geophys. Res. Lett. 2011, 38, 415–421. [Google Scholar] [CrossRef]
- Qi, Z. Research on the Drift Model of Free Objects at Ocean. Master’s Thesis, Dalian Maritime University, Dalian, China, 2016. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | Relative Error (%) | MSE (10−3) | RMSE (10−3) | MAE (10−3) |
|---|---|---|---|---|
| ECRNet (Our Method) | 0.0251 | 2.167 | 1.472 | 1.369 |
| RNN | 0.1643 | 9.418 | 3.069 | 2.923 |
| LSTM | 0.1026 | 5.651 | 2.377 | 2.164 |
| Transformer | 0.0863 | 4.002 | 2.013 | 1.981 |
| LSTNet | 0.0635 | 2.042 | 2.836 | 2.653 |
| LightGBM | 0.0914 | 4.822 | 2.196 | 2.032 |
| Model Type | Relative Error (%) | MSE (10−3) | RMSE (10−3) | MAE (10−3) |
|---|---|---|---|---|
| ECRNet (Our Method) | 0.0667 | 3.319 | 1.822 | 1.723 |
| RNN | 0.328 | 27.762 | 5.269 | 5.126 |
| LSTM | 0.236 | 16.991 | 4.128 | 4.096 |
| Transformer | 0.125 | 12.341 | 3.513 | 3.422 |
| LightGBM | 0.269 | 19.148 | 4.625 | 4.103 |
| LSTNet | 0.253 | 17.118 | 4.125 | 4.093 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Zhang, J.; Zhang, T. AUV Drift Track Prediction Method Based on a Modified Neural Network. Appl. Sci. 2022, 12, 12169. https://doi.org/10.3390/app122312169
Yu Y, Zhang J, Zhang T. AUV Drift Track Prediction Method Based on a Modified Neural Network. Applied Sciences. 2022; 12(23):12169. https://doi.org/10.3390/app122312169
Chicago/Turabian StyleYu, Yuna, Jing Zhang, and Tianchi Zhang. 2022. "AUV Drift Track Prediction Method Based on a Modified Neural Network" Applied Sciences 12, no. 23: 12169. https://doi.org/10.3390/app122312169
APA StyleYu, Y., Zhang, J., & Zhang, T. (2022). AUV Drift Track Prediction Method Based on a Modified Neural Network. Applied Sciences, 12(23), 12169. https://doi.org/10.3390/app122312169