
Research on A Collaborative Control Strategy of An Urban Expressway Merging Bottleneck Area




Abstract
1. Introduction
- The expressway capacity often changes when the merging bottleneck occurs, and there are queues and overflows of on-ramp merging vehicles. Research on the improvement of macro traffic flow has little consideration of the complex traffic characteristics of expressway merging bottlenecks, which means the macro traffic flow model may have low simulation accuracy when applied to the research of expressway merging bottlenecks.
- At present, a lot of research has been obtained for the cooperative control of expressways, but most control strategies have little research on the mutual feedback between control algorithms and traffic flow models.
- The existing expressway control strategies based on the macro traffic model are mostly based on unilateral considerations, such as traffic efficiency, safety, environment, etc. The research on comprehensive optimization objective functions under multi-objective constraints needs to be improved.
2. Improved CTM and Parameter Calibration, Validity Verification
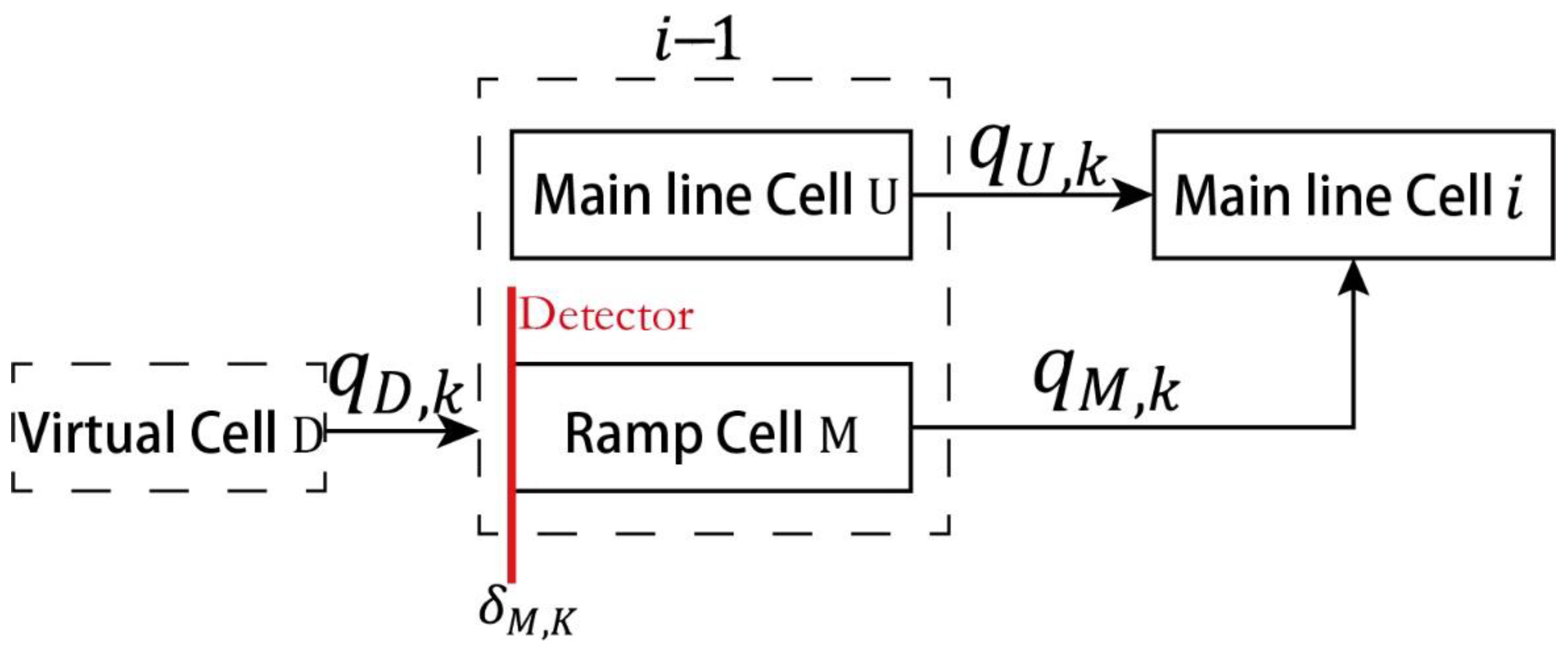
2.1. Cell Space Division Improvement
- Merging cell i can receive the maximum number of upstream mainline vehicles and ramp cells can send.
- 2.
- Merging cell i cannot receive the maximum number of upstream mainline vehicles and ramp cells can send.
2.2. Improve Merging Cell Basic Diagram
2.3. Update Entrance Ramp Status
2.4. Model Parameter Calibration and Validity Test
3. Construction of Collaborative Control Strategy for Expressway Merging Bottleneck
3.1. Basic Thinking
3.2. Objective Function
3.3. Strategy Design
4. An Illustrative Example
4.1. Simulation Platform Construction
4.2. Parameter Calibration
4.3. Effect Evaluation
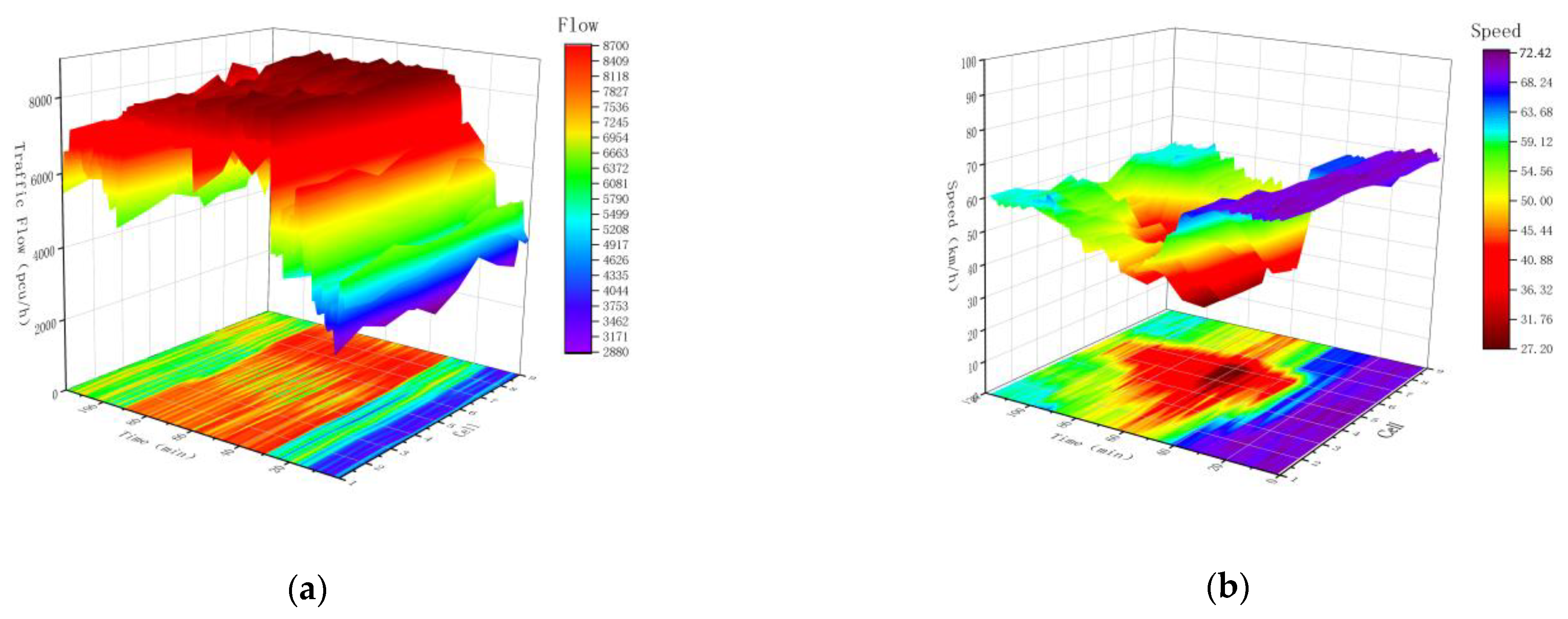
4.3.1. Merging Bottleneck Control Effect Analysis
4.3.2. Traffic Efficiency Improvement Analysis
- (1)
- Operational efficiency comparison
- (2)
- Safety comparison
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, L.; Xu, T.; Zhang, Z.; Hao, Y. Lane-Changing Recognition of Urban Expressway Exit Using Natural Driving Data. Appl. Sci. 2022, 12, 9762. [Google Scholar] [CrossRef]
- Khan, M.U.; Saeed, S.; Nehdi, M.L.; Rehan, R. Macroscopic Traffic-Flow Modelling Based on Gap-Filling Behavior of Heterogeneous Traffic. Appl. Sci. 2021, 11, 4278. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On Kinematic Waves. II. A Theory of Traffic Flow on Long Crowded Roads. Pro. Royal Soc. A Math. Phys. Eng. Sci. 1955, 229, 317–345. [Google Scholar]
- Richards, P.I. Shock Waves on the Highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Liudmila, T.; Carlos, C.W.; Maria Laura, D.M. Multi-directional Continuous Traffic Model forLarge-scale Urban Networks. Transport. Res. B-Meth. 2022, 158, 374–402. [Google Scholar]
- Daganzo, C.F. The Cell Rransmission Model: A Dynamic Representation of Highway Traffic Consistent with the Hydrodynamic Theory. Transport. Res. B-Meth. 1994, 28, 269–287. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Blosseville, J.M.; Hadj-Salem, H. Modelling and Real-time Control of Traffic Flow on the Southern Part of Boulevard Peripherique in Paris: Part II: Coordinated on-ramp metering. Transport. Res. A-Pol. 1990, 24, 345–359. [Google Scholar] [CrossRef]
- Yao, Z.; Jin, Y.; Jiang, H.; Hu, L.; Jiang, Y. CTM-based Traffic Signal Optimization of Mixed Traffic Flow with Connected Automated Vehicles and Human-driven vehicles. Phys. A 2022, 603, 127708. [Google Scholar] [CrossRef]
- Hadfi, R.; Tokuda, S.; Ito, T. Traffic Simulation in Urban Networks Using Stochastic Cell Transmission Model. Comput. Intell. 2017, 33, 826–842. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Aswakul, C. Closed-form Multiclass Cell Transmission Model Enhanced with Overtaking, Lane-Changing, and First-in First-out Properties. Transport. Res. C-Emer. 2017, 85, 86–110. [Google Scholar] [CrossRef]
- Cicic, M.; Johansson, K.H. Traffic Regulation via Individually Controlled Automated Vehicles: A Cell Transmission Model Approach. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Vishnoi, S.C.; Nugroho, S.A.; Taha, A.F. Asymmetric Cell Transmission Model-Based, Ramp-Connected Robust Traffic Density Estimation under Bounded Disturbances. In Proceedings of the American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1197–1202. [Google Scholar]
- Wang, H.W.; Sun, H.; Li, F.; Gu, J.; Du, J. Experimental Features and Characteristics of Speed Dispersion in Urban Freeway Traffic. Transport. Res. Rec. 2007, 1999, 150–160. [Google Scholar] [CrossRef]
- Tazul, I. Assessing Mobility and Safety Impacts of a Variable Speed Limit Control Strategy. Transport. Res. Rec. 2013, 2364, 1–11. [Google Scholar]
- Zackor, H. Speed Limitation on Freeways: Traffic-responsive Strategies. In Concise Encyclopedia of Traffic and Transportation Systems; Elsevier: Oxford, UK, 1991; pp. 507–511. [Google Scholar]
- Papageorgiou, M.; Kosmatopoulos, E. Effects of Variable Speed Limits on Motorway Traffic Flow. Transport. Res. Rec. 2008, 2047, 37–48. [Google Scholar] [CrossRef]
- Chris, L.; Bruce, H.; Frank, S. Evaluation of Variable Speed Limits to Improve Traffic Safety. Transport. Res. C-Emer. 2006, 14, 213–228. [Google Scholar]
- Shaaban, K.; Khan, M.A.; Hamila, R. Literature Review of Advancements in Adaptive Ramp Metering. Procedia Comput. Sci. 2016, 83, 203–211. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; Uddin, N.; Pande, A. Split Models for Predicting Multivehicle Crashes During High-Speed and Low-Speed Operating Conditions on Freeways. Transport. Res. Rec. 2005, 1908, 51–58. [Google Scholar] [CrossRef]
- Qu, D.; Chen, K.; Wang, S.; Wang, Q. A Two-Stage Decomposition-Reinforcement Learning Optimal Combined Short-Time Traffic Flow Prediction Model Considering Multiple Factors. Appl. Sci. 2022, 12, 7978. [Google Scholar] [CrossRef]
- Kim, H.; Jung, D. Estimation of Optimal Speed Limits for Urban Roads Using Traffic Information Big Data. Appl. Sci. 2021, 11, 5710. [Google Scholar] [CrossRef]
- Vrbanić, F.; Ivanjko, E.; Kušić, K.; Čakija, D. Variable Speed Limit and Ramp Metering for Mixed Traffic Flows: A Review and Open Questions. Appl. Sci. 2021, 11, 2574. [Google Scholar] [CrossRef]
- Strömgren, P.; Lind, G. Harmonization with Variable Speed Limits on Motorways. Transp. Res. Procedia 2016, 15, 664–675. [Google Scholar] [CrossRef]
- Abdelaty, M.A.; Dhindsa, A. Coordinated Use of Variable Speed Limits and Ramp Metering for Improving Safety on Congested Freeways. In Proceedings of the Transportation Research Board 86th Annual Meeting, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Camacho, E.F.; Bordons, C. Model Predictive Control, 2nd ed.; Springer: Berlin, Germany, 2004; pp. 168–210. [Google Scholar]
- Hegyi, A.; Schutter, B.D.; Heelendoorn, J. MPC-based Optimal Coordination of Variable Speed Limits to Suppress Shock Waves in Freeway Traffic. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Ghods, A.H.; Kian, A.R.; Tabibi, M. Adaptive Freeway Ramp Metering and Variable Speed Limit Control: A Genetic-fuzzy Approach. IEEE Intell. Transp. Syst. Mag. 2009, 1, 27–36. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cars | Trucks | Buses | |
|---|---|---|---|
| Mainline | 86% | 8% | 6% |
| Ramp | 91% | 6% | 3% |
| Variable Name | Meaning | Boundary |
|---|---|---|
| Mainline free flow speed | [65 km/h,75 km/h] | |
| Ramp free flow speed | [45 km/h,55 km/h] | |
| Mainline Capacity of single lane | [1800 pcu/h,2200 pcu/h] | |
| Ramp capacity of single lane | [1600 pcu/h,2100 pcu/h] | |
| Congested wave speed | [10 km/h,18 km/h] | |
| Capacity decline rate | [7%,15%] |
| Algorithm Parameters | Parameter Value |
|---|---|
| Population size | 100 |
| Maximum number of iterations | 200 |
| Crossover probability | 0.7 |
| Mutation probability | 0.1 |
| Fitness function Fitness () |
| Parameter Calibration | |||||||
|---|---|---|---|---|---|---|---|
(km/h) | (km/h) | (pcu/h) | (pcu/h) | (km/h) | (km/h) | (pcu/km.ln) | % |
| 70.2 | 49.4 | 2095 | 1807 | 16.7 | 14.4 | 32.3 | 13.7 |
| Parameter | Meaning | Calibration Value |
|---|---|---|
| MTFC-VSL Target flow proportional gain | 100 | |
| MTFC-VSL Target flow integral gain | 15 | |
| MTFC-VSL Rate-limiting integral gain | 6 × 10−3 | |
| PI-ALINEA Upper limit of adjustment value | 40 | |
| PI-ALINEA Lower limit of adjustment value | −10 | |
| Smooth coefficient of mainline expected occupancy | 0.8 | |
| PI-ALINEA Proportional gain | 80 | |
| PI-ALINEA Feedback gain | 40 | |
| Maximum ramp queue length | 100 |
| Parameter Calibration | |||
|---|---|---|---|
| Sampling Period (s) | Control Cycle (s) | Predictive Time Length (Min) | Control Time Length (min) |
| 10 | 60 | 10 | 8 |
| Mainline | Ramp | |||||
|---|---|---|---|---|---|---|
| Evaluating Indicator | Uncontrolled | Cooperative Control | Optimized Ratio | Uncontrolled | Cooperative Control | Optimized Ratio |
| Total travel time (veh·h) | 103.980 | 94.600 | +9.02% | 9.280 | 10.109 | −8.93% |
| Total delay time (veh·km) | 11.956 | 10.272 | +14.09% | 4.759 | 5.141 | −8.04% |
| Maximum queue length (m) | 293 | 237 | +19.11% | 44 | 47 | −6.82% |
| Stop times (veh·times) | 266 | 239 | +10.15% | 144 | 157 | −9.03% |
| Mainline | Ramp | |||||
|---|---|---|---|---|---|---|
| Evaluating Indicator | Uncontrolled | Cooperative Control | Optimized Ratio | Uncontrolled | Cooperative Control | Optimized Ratio |
| Total travel time (veh·h) | 122.690 | 99.311 | +19.06% | 18.887 | 15.874 | +15.95% |
| Total delay time (veh·km) | 30.893 | 20.070 | +35.03% | 13.082 | 8.739 | +33.20% |
| Maximum queue length (m) | 368 | 268 | +27.17% | 89 | 67 | +24.72% |
| Stop times (veh·times) | 359 | 307 | +14.48% | 475 | 369 | +22.48% |
| Sum | Max | Min | Median | Standard Deviation | Range | |
|---|---|---|---|---|---|---|
| Uncontrolled | 542.351 | 0.037 | 0.952 | 0.458 | 0.181 | 0.915 |
| Cooperative control | 502.564 | 0.039 | 0.914 | 0.427 | 0.158 | 0.875 |
| Sum | Max | Min | Median | Standard Deviation | Range | |
|---|---|---|---|---|---|---|
| Uncontrolled | 27,643 | 2.46 | 44.28 | 24.67 | 7.95 | 41.82 |
| Cooperative control | 29,319 | 2.48 | 43.92 | 24.81 | 7.16 | 41.44 |
| Segment | Min | Median | Max | Range | Standard Deviation |
|---|---|---|---|---|---|
| Cell1 | −6.79 | −1.38 | 6.16 | 12.95 | 3.6959 |
| Cell2 | −7.79 | −1.3 | 6.92 | 14.71 | 3.6555 |
| Cell3 | −8.24 | −1.15 | 6.9 | 15.14 | 3.4471 |
| Cell4 | −9.12 | 0.89 | 4.22 | 13.34 | 3.5556 |
| Cell5 | −14.4 | −0.95 | 5.9 | 20.3 | 4.5390 |
| Cell6 | −15.1 | −0.9 | 7.6 | 22.7 | 4.3206 |
| Cell7 | −7.92 | −0.9 | 5.1 | 13.02 | 3.1406 |
| Cell8 | −7.8 | −0.73 | 5.7 | 13.5 | 3.2511 |
| Cell9 | −8.7 | −1.15 | 4.92 | 13.62 | 3.0098 |
| Total | −15.1 | −0.97 | 7.6 | 22.7 | 3.5911 |
| Segment | Min | Median | Max | Range | Standard Deviation |
|---|---|---|---|---|---|
| Cell1 | −5.26 | −1.19 | 3.2 | 8.46 | 2.2459 |
| Cell2 | −6.06 | 1.41 | 4.98 | 11.04 | 3.2166 |
| Cell3 | −5.82 | 0.145 | 3.14 | 8.96 | 2.7141 |
| Cell4 | −6.2 | 1.21 | 3.7 | 9.90 | 2.6911 |
| Cell5 | −6.9 | −1.57 | 3.82 | 10.72 | 3.2140 |
| Cell6 | −5.84 | 1.13 | 4.34 | 10.18 | 3.0390 |
| Cell7 | −4.16 | 1.07 | 3.02 | 7.18 | 2.3337 |
| Cell8 | −3.7 | 0.02 | 3.30 | 7.00 | 2.0642 |
| Cell9 | −5.9 | 1.28 | 3.70 | 9.60 | 2.4876 |
| Total | −6.9 | 1.12 | 4.98 | 11.88 | 2.6614 |
| Min | Median | Max | Range | Standard Deviation | |
|---|---|---|---|---|---|
| speed difference (km/h) | −16.68 | 5.02 | 14.68 | 31.36 | 7.4133 |
| Min | Median | Max | Range | Standard Deviation | |
|---|---|---|---|---|---|
| speed difference (km/h) | −9.7 | 1.95 | 10.16 | 19.86 | 4.9042 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Wang, J.; Wang, S.; Lu, X.; Guo, B. Research on A Collaborative Control Strategy of An Urban Expressway Merging Bottleneck Area. Appl. Sci. 2022, 12, 11397. https://doi.org/10.3390/app122211397
Ma C, Wang J, Wang S, Lu X, Guo B. Research on A Collaborative Control Strategy of An Urban Expressway Merging Bottleneck Area. Applied Sciences. 2022; 12(22):11397. https://doi.org/10.3390/app122211397
Chicago/Turabian StyleMa, Chicheng, Jianjun Wang, Sai Wang, Xiaojuan Lu, and Bingqian Guo. 2022. "Research on A Collaborative Control Strategy of An Urban Expressway Merging Bottleneck Area" Applied Sciences 12, no. 22: 11397. https://doi.org/10.3390/app122211397
APA StyleMa, C., Wang, J., Wang, S., Lu, X., & Guo, B. (2022). Research on A Collaborative Control Strategy of An Urban Expressway Merging Bottleneck Area. Applied Sciences, 12(22), 11397. https://doi.org/10.3390/app122211397