

Investigating the Obstacle Climbing Ability of a Coal Mine Search-and-Rescue Robot with a Hydraulic Mechanism

Abstract
1. Introduction
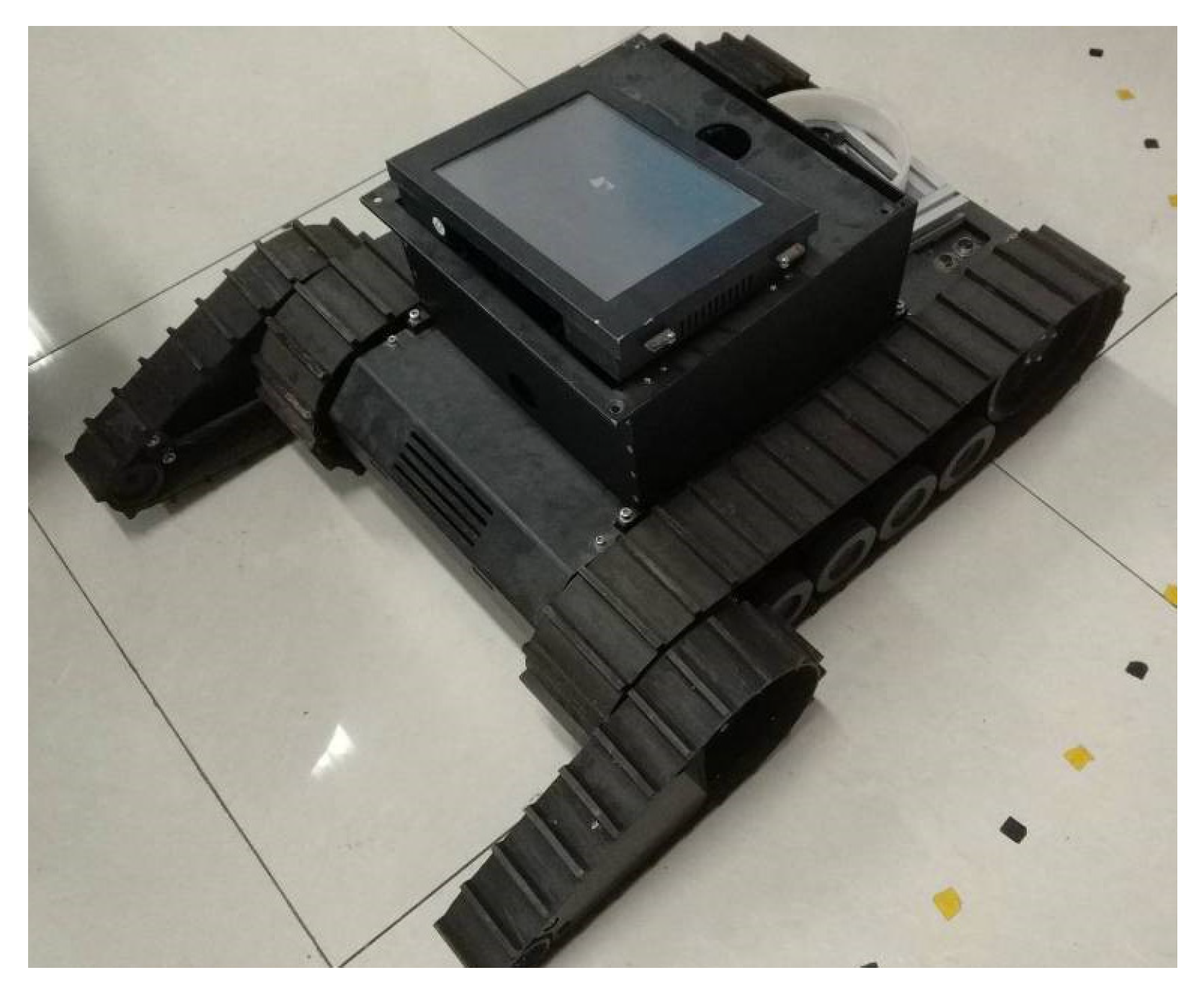
2. Structure Design of the Search-and-Rescue Robot
2.1. Robot Design Scheme
2.2. Hydraulic Mechanism Analysis
2.3. Simplified Model of the Search-and-Rescue Robot
3. Obtaining the Solution of Centroid Coordinates
3.1. Transformation between the Body Coordinate System and Global Coordinate System
3.2. Transformation between the Centroid Coordinate System and Body Coordinate System
4. Analysis
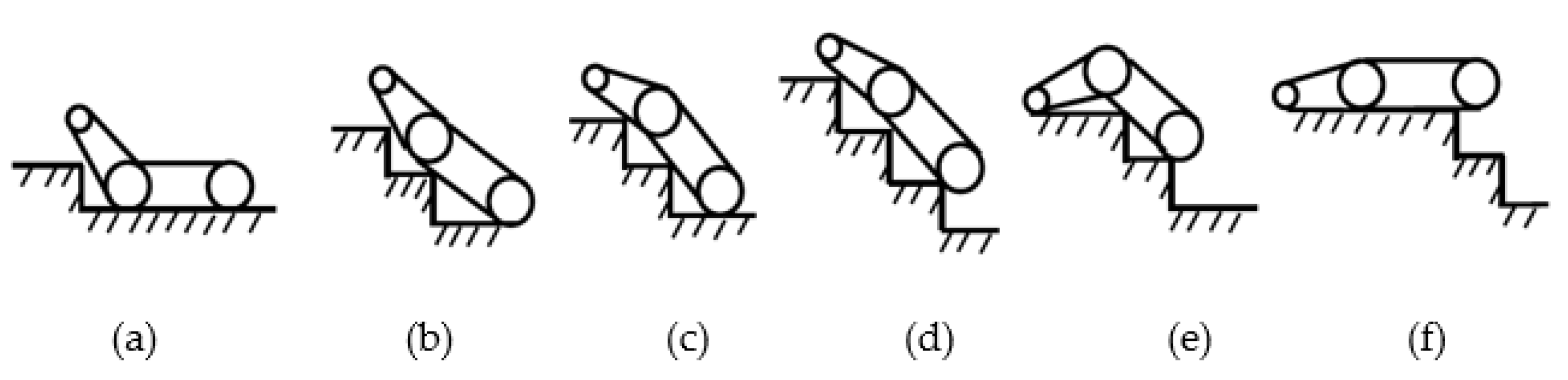
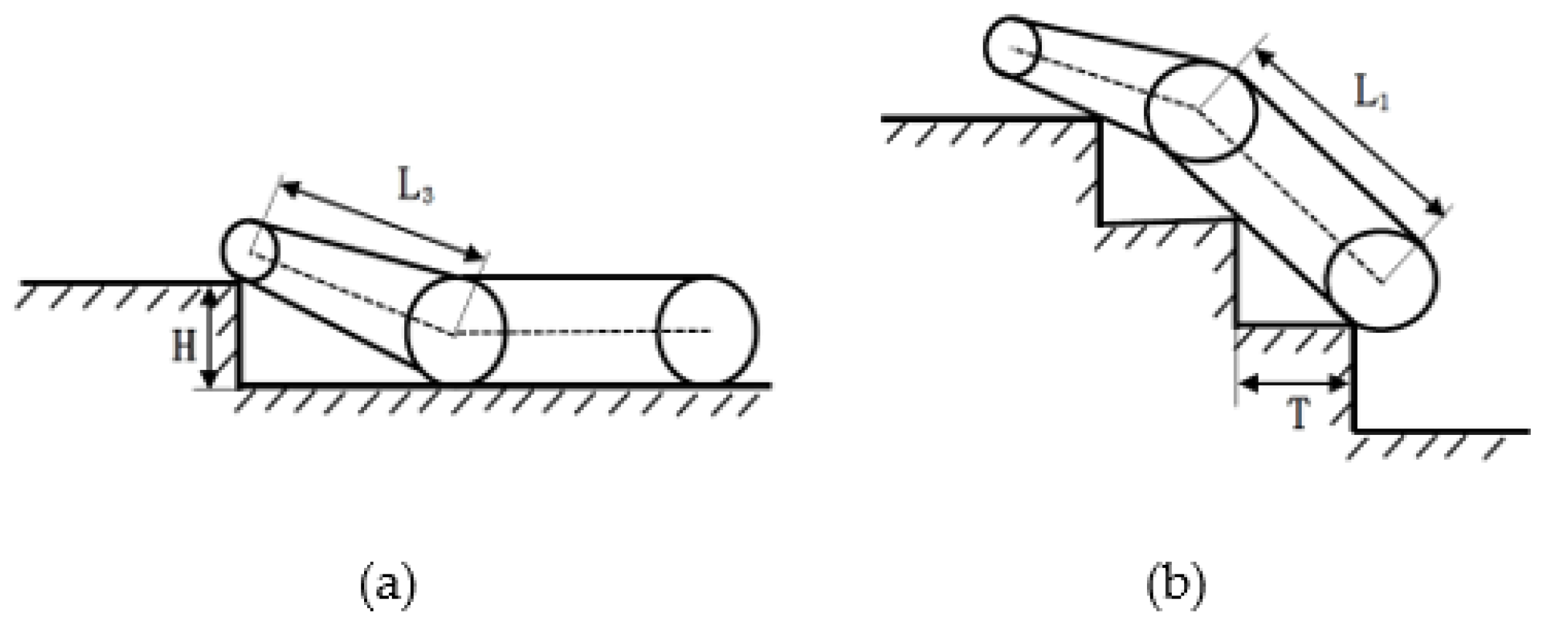
4.1. Analysis of the Rocker Arm in a Retracted State during Step Crossing
4.2. Analysis of the Rocker Arm in an Extended State during Step Crossing
4.3. Analysis of the Rocker Arm in a Retracted State during Stairs Climbing
4.4. Analysis of the Rocker Arm in an Extended State during Stairs Climbing
4.5. Experimental Testing
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ge, S. Application of robot in “9.11” rescue operation. Fire Tech. Prod. Inf. 2003, 7, 44–47. [Google Scholar]
- Yamauchi, B.M. Daredevil: Ultra-wideband radar sensing for small UGVs. In Proceedings of the Conference Unmanned Systems Technology IX.65610B, Orlando, FL, USA, 2 May 2007. [Google Scholar]
- Restas, A. Drone Applications for Supporting Disaster Management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar] [CrossRef]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as aerial sensor network for disaster management applications. E I Elektrotechnik Und Inf. 2010, 127, 56–63. [Google Scholar] [CrossRef]
- Habib, M.K.; Baudoin, Y.; Nagata, F. Robotics for rescue and risky intervention. In Proceedings of the IECON 2011–37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 3305–3310. [Google Scholar]
- Surve, J.; Mehta, V.; Rawat, A.; Kamaliya, K.; Deb, D. Low Cost 2 MHz Transmitter for the Detection of Human Trapped Under the Snow. In Proceedings of the International Conference on Power, Control and Communication Infrastructure 2019 (ICPCCI2019), Ahmedabad, Gujarat, India, 4–5 July 2019. [Google Scholar]
- Wei, J.; Jia, G.; Ma, H. Simulation Analysis of the Virtual Prototyping of a Mine Rescue Robot. Mech. Sci. Technol. Aerosp. Eng. 2008, 27, 1369–1379. [Google Scholar]
- Wang, Y.; Zhu, H.; Wang, Y.S.; Cheng, G.; Li, Y.W. Current Status and Technical Problems in Research of Coal Mine Rescue Robot. Coal Mine Mach. 2007, 4, 107–109. [Google Scholar]
- Wang, Z.; Dong, E.; Jin, H.; Wang, H.; Lu, D.; Xu, M.; Yang, J. System dynamics simulation and prototype design of a high efficient legged robot based on hybrid-driven mechanism. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar]
- Luo, Q.S.; Liu, Y.S.; Niu, K.; Wu, F.; Li, G.H. Research on new wheel-legged robot. J. Dalian Univ. Technol. 2011, 51, 88–92. [Google Scholar]
- Huang, B.; Wang, P.F.; Sun, L.N. Design and Analysis of a Hybrid Quadruped Robot. Mach. Des. Res. 2006, 05, 49–53. [Google Scholar]
- Wang, P.; Bo, H.; Sun, L. Walking research on multi-motion mode quadruped bionic robot based on moving ZMP. In Proceedings of the Mechatronics and Automation, 2005 IEEE International Conference, Niagara Falls, ON, Canada, 29 July–1 August 2005. [Google Scholar]
- Hashimoto, K.; Hosobata, T.; Sugahara, Y.; Mikuriya, Y.; Sunazuka, H.; Kawase, M.; Lim, H.; Takanishi, A. Realization by Biped Leg-wheeled Robot of Biped Walking and Wheel-driven Locomotion. In Proceedings of the IEEE International Conference on Robotics & Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- China Electricity Council. Data List of National Power Industry Statistical Express in 2016; China Electricity Council: Beijing, China, 2017; pp. 22–29. [Google Scholar]
- Casper, J.L.; Micire, M.; Murphy, R.R. Issues in intelligent robots for search and rescue. In Proceedings of the Unmanned Ground Vehicle Technology II International Society for Optics and Photonics, Orlando, FL, USA, 24–28 April 2000. [Google Scholar]
- Ortigoza, R.S.; Marcelino-Aranda, M.; Ortigoza, G.S.; Guzman, V.M.H.; Molina-Vilchis, M.A. Wheeled Mobile Robots: A review. IEEE Lat. Am. Trans. 2012, 10, 2209–2217. [Google Scholar] [CrossRef]
- Liu, S.; Sun, D. Minimizing Energy Consumption of Wheeled Mobile Robots via Optimal Motion Planning. IEEE/ASME Trans. Mechatron. 2014, 19, 401–411. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, G.; Zeng, W.; Gao, F.; Chong, K. Lateral Stability of a Mobile Robot Utilizing an Active Adjustable Suspension. Appl. Sci. 2019, 9, 4410. [Google Scholar] [CrossRef]
- Zeng, X.; Li, D.; Zhang, X. Quadruped Robot Walking Control on Trench-like Noncontinuous Terrain. Robot 2011, 33, 700–705. [Google Scholar]
- Wang, Z.F.; Ma, S.G.; Li, B.; Wang, Y.C. Simulation and Experimental Study of an Energy-based Control Method for the Serpentine Locomotion of a Snake-like Robot. Acta Autom. Sin. 2011, 37, 604–614. [Google Scholar]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Perception-Driven Obstacle-Aided Locomotion for Snake Robots: The State of the Art, Challenges and Possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef]
- Yang, J.I.; Huo, G.Q. Research Status of Track-type Mobile Robots. For. Mach. Woodwork. Equip. 2012, 40, 7–10. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker–Adaptation of characteristics of the propulsion by a leg trajectory-. J. Robot. Soc. Jpn. 2008, 26, 691–698. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker—Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels. Adv. Robot. 2012, 26, 969–988. [Google Scholar] [CrossRef]
- Ding, L. Key Technology Analysis of Big Dog Quadruped Robot. J. Mech. Eng. 2015, 51, 1–23. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the Rough-Terrain Quadruped Robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Zhu, J.H. Design and Research on the Walking Device of the Telescopic Wheel Track Swith on The Small; Guangxi University: Nanning, China, 2016; pp. 11–14. [Google Scholar]
- Cai, Z.X.; Xie, B. Rbotics; Tsinghua University Press: Beijing, China, 2015; pp. 46–58. [Google Scholar]
- Han, H.U.; Cheng, J.M.; Niu, Z.G. Analysis on Obstacle-surmounting of Coal Mine Detection Robot Based on RPY. Coal Mine Mach. 2013, 34, 109–111. [Google Scholar]
- Qiao, F.B.; Yang, R.Q. Analysis on the Stair climbing Ability of Six wheeled Mobile Robot. Robot 2004, 26, 301–305. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nomenclature | |
|---|---|
| G1 | Center of gravity of the main body of the robot Center of gravity of the robot’s rocker arm The minimum center distance of the large wheels at both ends when the rocker arm is retracted and extended The maximum center distance of the large wheels at both ends when the rocker arm is retracted and extended |
| G2 | |
| L1 | |
| L11 | |
| L2 | Distance from the center of gravity of the robot body to the center of the rear wheel |
| L3 | Distance between the centers of the two wheels on the robot rocker arm |
| L4 | Distance from the center of gravity of the rocker arm to the center of the rear wheel of the rocker arm |
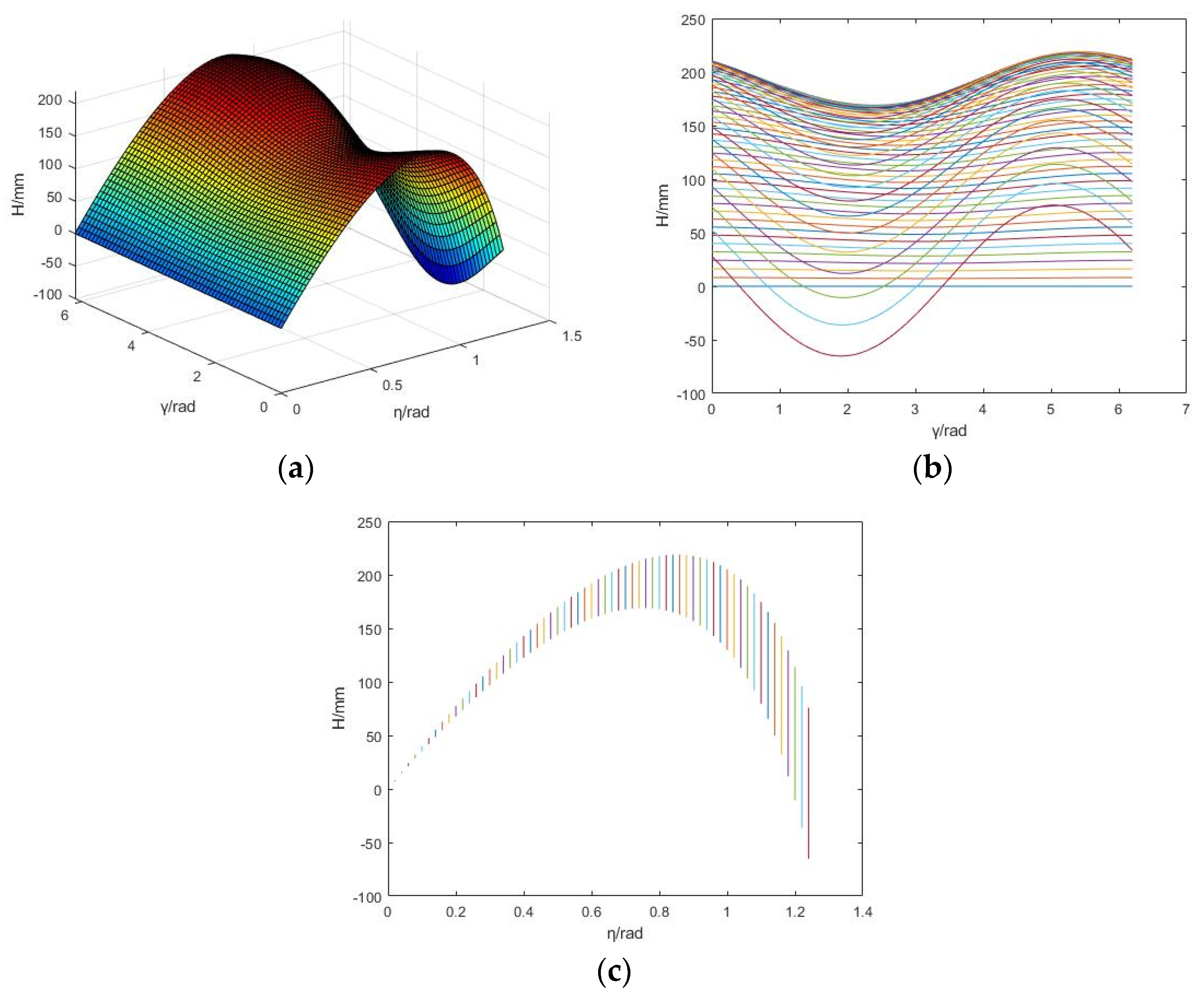
| γ | Swing angle of the rocker arm |
| η | Pitch angle of the robot body |
| R | Big wheel radius |
| r | Small wheel radius |
| Parameter | Before the Improvement | After the Improvement | Change |
|---|---|---|---|
| Rocker arm length | 300 mm | 300 mm | 0 |
| Main body | 510 mm | 510 mm | 0 |
| Max length | 810 mm | 1010 mm | 24.7% |
| Max overrun height | 187.74 mm | 219.01 mm | 16.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, L.; Wang, H.; Si, H.; Li, Y.; Pan, T. Investigating the Obstacle Climbing Ability of a Coal Mine Search-and-Rescue Robot with a Hydraulic Mechanism. Appl. Sci. 2022, 12, 10485. https://doi.org/10.3390/app122010485
Shang L, Wang H, Si H, Li Y, Pan T. Investigating the Obstacle Climbing Ability of a Coal Mine Search-and-Rescue Robot with a Hydraulic Mechanism. Applied Sciences. 2022; 12(20):10485. https://doi.org/10.3390/app122010485
Chicago/Turabian StyleShang, Lei, Haibo Wang, Haiqing Si, Yao Li, and Ting Pan. 2022. "Investigating the Obstacle Climbing Ability of a Coal Mine Search-and-Rescue Robot with a Hydraulic Mechanism" Applied Sciences 12, no. 20: 10485. https://doi.org/10.3390/app122010485
APA StyleShang, L., Wang, H., Si, H., Li, Y., & Pan, T. (2022). Investigating the Obstacle Climbing Ability of a Coal Mine Search-and-Rescue Robot with a Hydraulic Mechanism. Applied Sciences, 12(20), 10485. https://doi.org/10.3390/app122010485