
Finite-Time Set Reachability of Probabilistic Boolean Multiplex Control Networks


Abstract
:1. Introduction
2. Preliminaries and Problem Setting
2.1. Preliminaries
2.2. Problem Setting
- is said to be overall reachable with probability one from on γ if, for any initial state , there exists an input sequence γ and a positive integer ξ such that
- is said to be global reachable with probability one from on γ if, for any initial state , there exists an input sequence γ and a positive integer ξ such that
3. Finite-Time Set Reachability
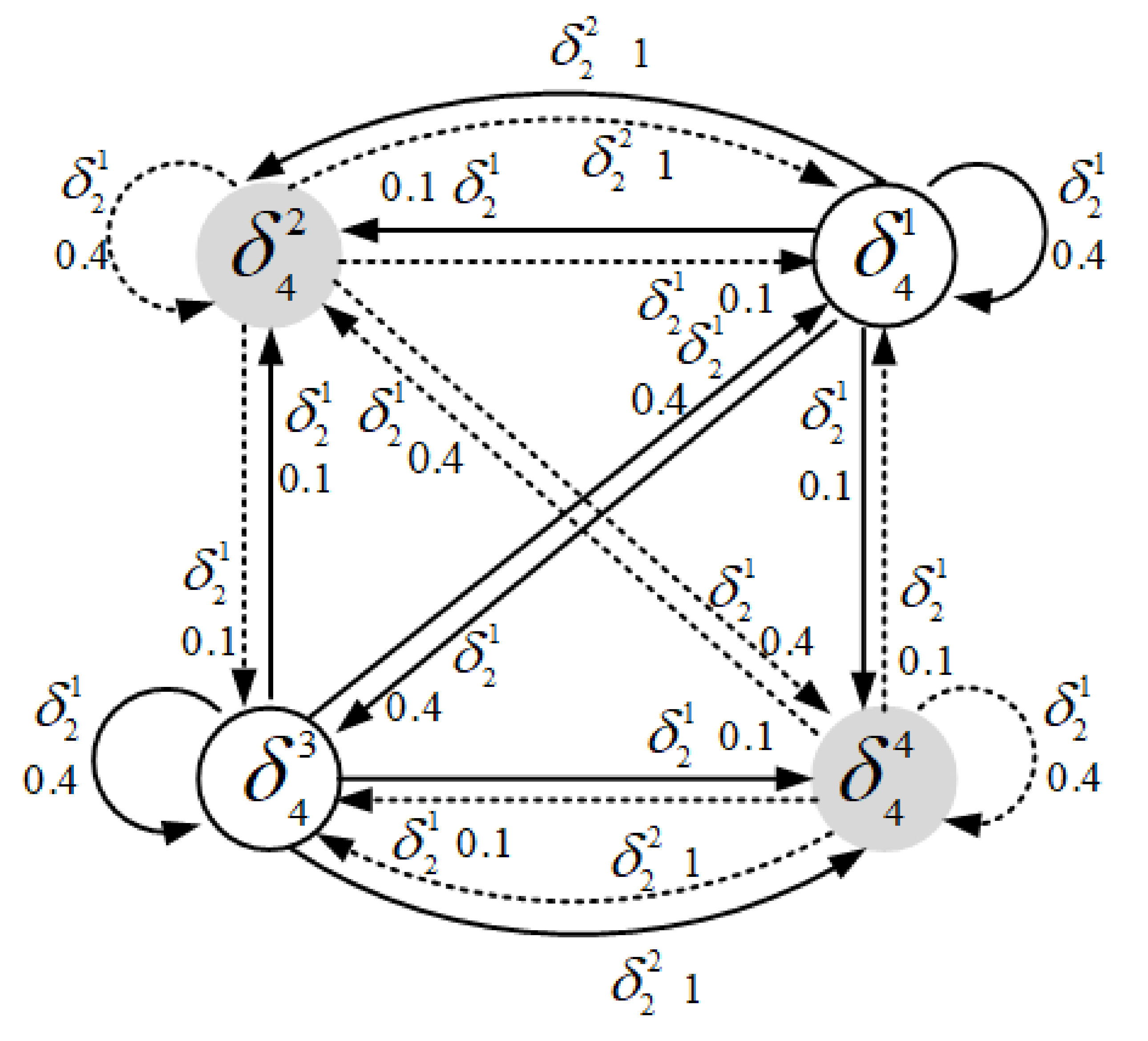
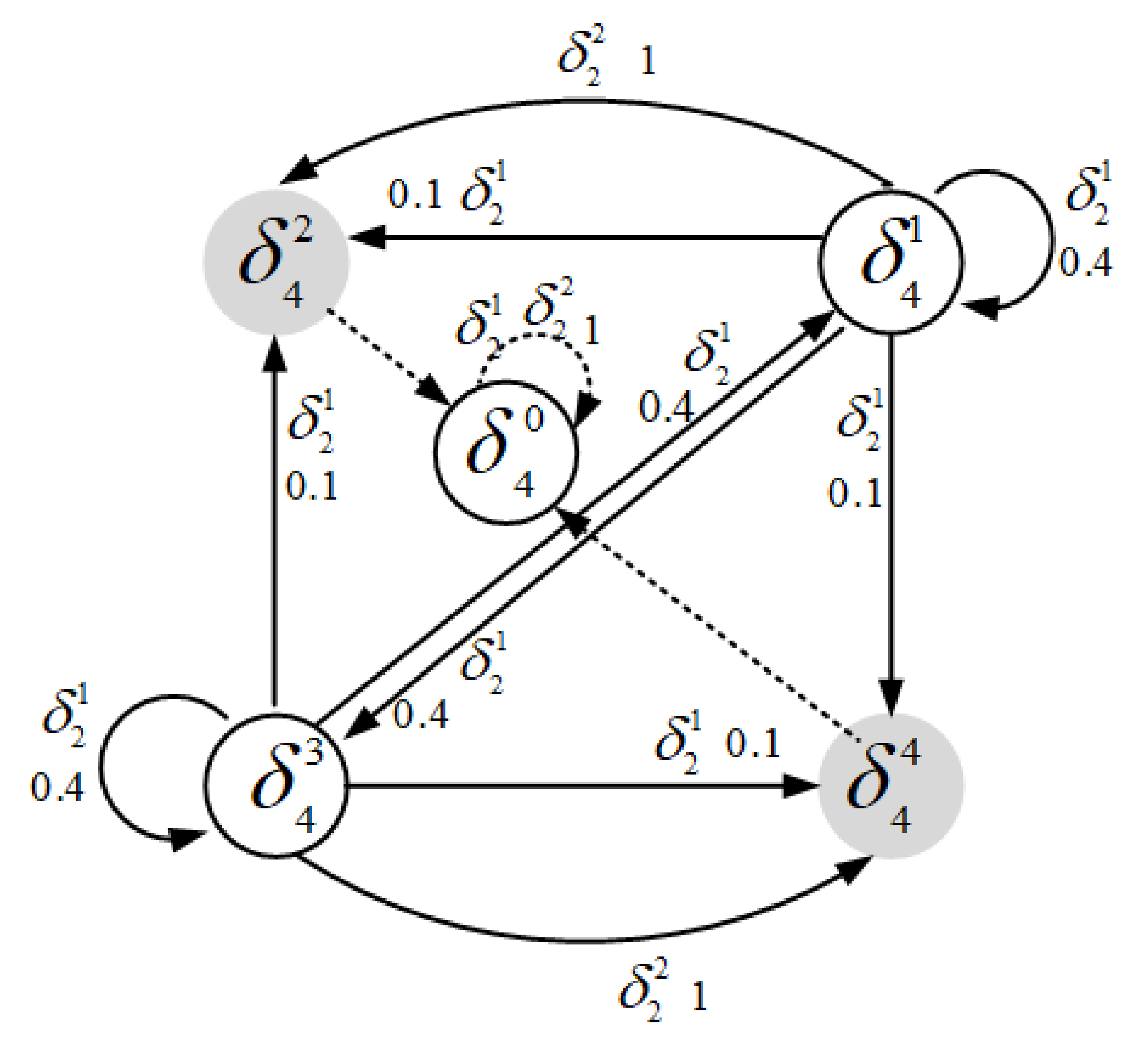
3.1. State Transfer Graph
- 1.
- =∪ is the set of nodes. For the PBMCNs (4), = and =. For RLDS (7), = and =.
- 2.
- × denote the set of labled edges. , represents the system travels from to with a probability under the control , denote by .
- The edge starting from in stay unaltered.
- The edge starting from in are substituted with the edges in directed toward with probability one.
- The edge is added.
3.2. Finite-Time Set Reachability with Probability One
- 1.
- An input sequence exists such that is overall reachable with probability one from on for PBMCNs (4) if and only if is overall reachable with probability one from on for RLDS (7).
- 2.
- An input sequence exists such that is global reachable with probability one from on for PBMCNs (4) if and only if is global reachable with probability one from on for RLDS (7).
- The ξ step overall transition probability from any state to is non-decreasing as ξ increases, i.e.,
- The ξ step global transition probability from any state to is non-decreasing as ξ increases, i.e.,
- 1.
- An input sequence exists such that is overall reachable with probability one from on if and only if
- 2.
- An input sequence exists such that is global reachable with probability one from on if and only if
4. Result and Discussion
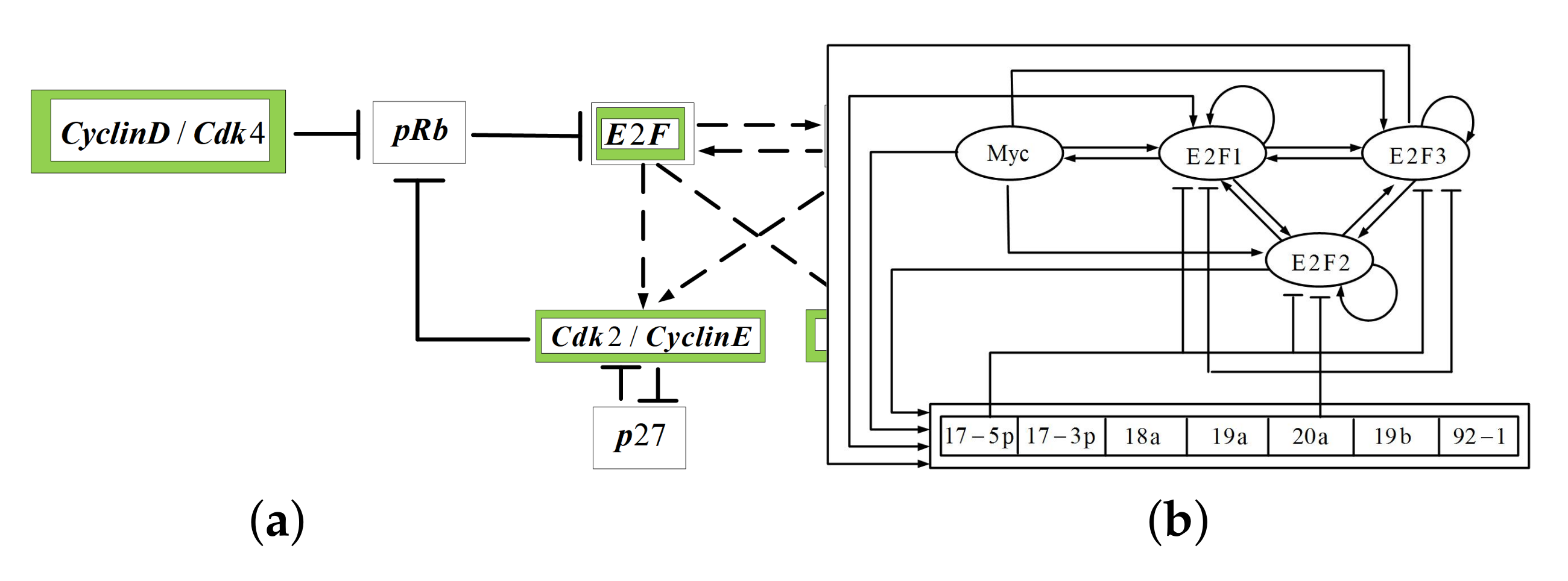
- : Transcription factor involved in gene transcription;
- : Transcription factor involved in gene transcription;
- : Non-coding RNA cluster;
- : Retinoblastoma protein;
- : The transcription of miRNA-17-92 is promoted, allowing E2F to enter the cancerous regions under the regulation of retinoblastoma protein;
- : The expression of oncogenes is promoted by E2F;
- : The expression of oncogenes is inhibited by E2F, and tumor suppressor genes are expressed by E2F;
- : The expression of oncogenes is promoted by Myc;
- : The expression of oncogenes is inhibited by Myc, and tumor suppressor genes are expressed by Myc;
- : The transcription of miRNA-17-92 is promoted, allowing Myc to enter the cancerous regions.
5. Conclusions
- 1.
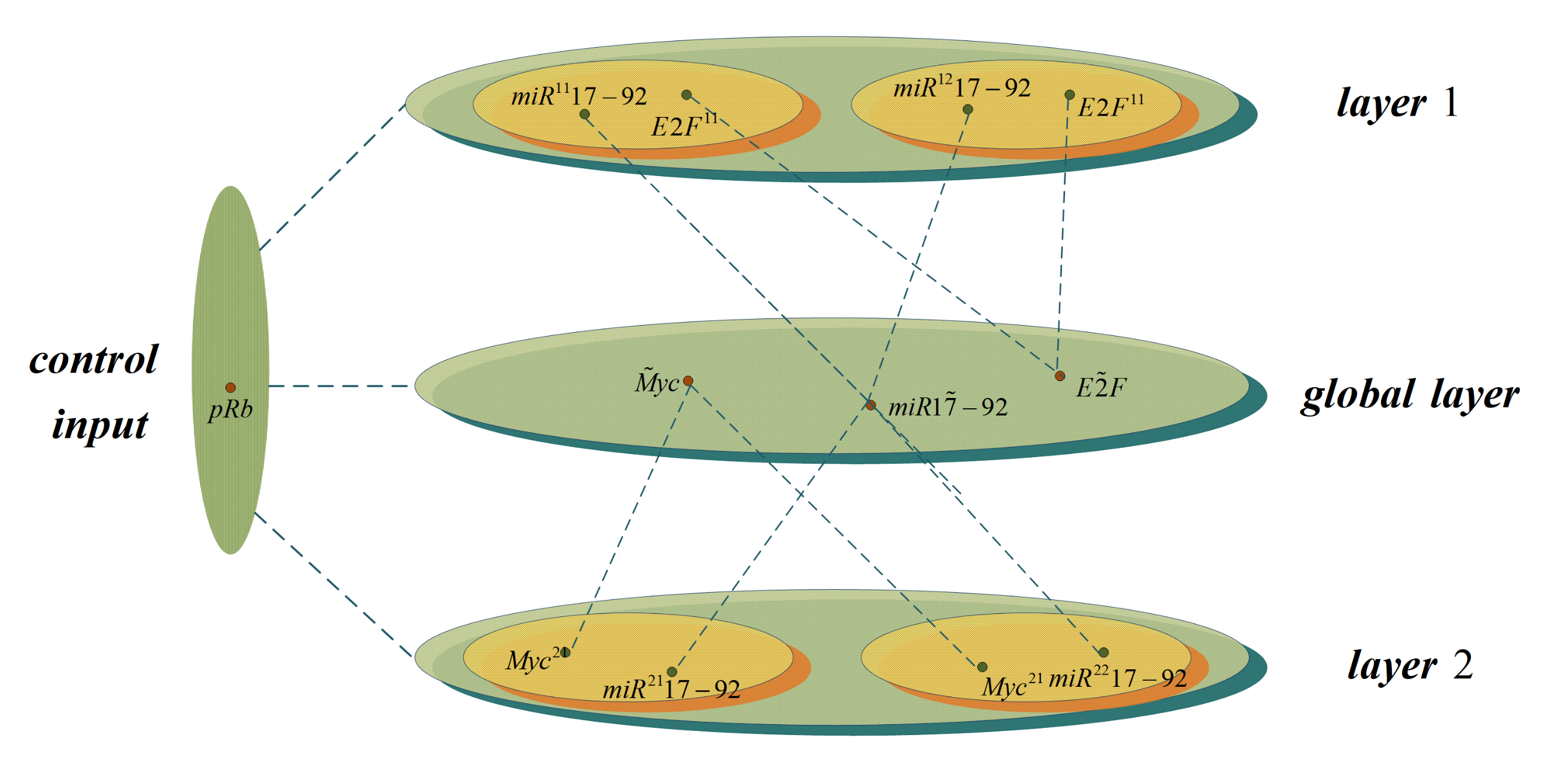
- Considering the systematic nature of biological models, in this paper, the PBMCNs are proposed based on the PBCNs. The model can simulate complex gene regulatory networks, such as cancer networks.
- 2.
- In order to demonstrate the set reachability of PBMCNs, the set reachability issue of PBMCNs is transformed into the set reachability issue of RLDS by the STG reconstruction technique, and a necessary and sufficient condition for the finite-time set reachability of PBMCNs is obtained.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| STP | semi tensor product |
| BNs | Boolean networks |
| BCNs | Boolean control networks |
| SBCNs | switched Boolean control networks |
| PBCNs | probabilistic Boolean control networks |
| PBMCNs | probabilistic Boolean muliplex control networks |
| STG | State transfer graph |
| Notations | Definitions |
| ⋉ | semi-tensor product |
| ⊗ | Kronecker product |
| identity matrix | |
| Logic domain | |
| Set of m-dimensional column vector consisting of logical value | |
| is a set of all of the columns of | |
| ith column of | |
| n-dimensional vector | |
| m-dimensional column vector | |
| Set of logical matrices with dimensions | |
| Set of Boolean matrices with dimensions | |
| ith column of matrix A | |
| Matrix A with | |
| {N, N + 1,…,M}, where and are positive integers | |
| Swap matrix with index | |
| The element at i-th row j-th column of matrix A |
References
- Kauffman, S.A. Metabolic stability and epigenesis in randomly constructed genetic nets. J. Theor. Biol. 1968, 22, 437–467. [Google Scholar] [CrossRef]
- Kauffman, S.A. At home in the universe. Math. Soc. Sci. 1995, 33, 94–95. [Google Scholar]
- Krumsiek, J.; Marr, C.; Schroeder, T.; Theis, F.J. Hierarchical differentiation of myeloid progenitors is encoded in the transcription factor network. PLoS ONE 2011, 6, e22649. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, R.; Shoemaker, R.; Wang, W. Systematic search for recipes to generate induced pluripotent stem cells. PLoS Comput. Biol. 2011, 7, e1002300. [Google Scholar] [CrossRef]
- Flttmann, M.; Scharp, T.; Klipp, E. A stochastic model of epigenetic dynamics in somatic cell reprogramming. Front. Physiol. 2012, 3, 216. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wang, Y. Boolean derivative calculation with application to fault detection of combinational circuit via the semi-tensor product method. Automatica 2012, 48, 688–693. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Li, H. New approach to derivative calculation of multi-valued logical functions with application to fault detection of digital circuits. IET Control Theory A 2014, 8, 554–560. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Wu, Y.H. A stochastic logical model-based approximate solution for energy management problem of HEVs. Sci. China Inf. Sci. 2018, 61, 1–3. [Google Scholar] [CrossRef] [Green Version]
- Cheng, D.Z.; Qi, H.S.; Zhao, Y. An Introduction to Semi-Tensor Product of Matrices and Its Applications; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2012; pp. 37–56. [Google Scholar]
- Yu, Y.Y.; Meng, M.; Feng, J.E. Observability of Boolean networks via matrix equations. Automatica 2020, 111, 108621. [Google Scholar] [CrossRef]
- Yu, Y.Y.; Meng, M.; Feng, J.E.; Chen, G. Observability criteria for Boolean networks. IEEE Trans. Automat. Control 2021, 1, 1. [Google Scholar] [CrossRef]
- Liu, Y.; Zhong, J.; Daniel, W.C.H.; Gui, W.H. Minimal observability of Boolean networks. Sci. China Inf. Sci. accepted. 2021. [Google Scholar] [CrossRef]
- Chen, S.Q.; Wu, Y.H.; Macauley, M. Monostability and bistability of Boolean networks using semi-tensor products. IEEE Trans. Control Netw. 2018, 6, 1379–1390. [Google Scholar] [CrossRef]
- Cheng, D.Z.; Zhao, Y. Identification of Boolean control networks. Automatica 2011, 47, 702–710. [Google Scholar] [CrossRef]
- Lu, J.Q.; Zhong, J.; Huang, C.; Cao, J. On pinning controllability of Boolean control networks. IEEE Trans. Automat. Control 2015, 61, 1658–1663. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y. Further results on feedback stabilization control design of Boolean control networks. Automatica 2017, 83, 303–308. [Google Scholar] [CrossRef]
- Liu, R.J.; Lu, J.; Cao, J.; Wu, Z.G. Delayed feedback control for stabilization of Boolean control networks with state delay. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3283–3288. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.Q. Observability of Boolean control networks using parallel extension and set reachability. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6402–6408. [Google Scholar] [CrossRef]
- Lu, J.; Zhong, J.; Ho, D.W.C.; Tang, Y.; Cao, J. On controllability of delayed Boolean control networks. Siam. J. Control Optim. 2019, 54, 475–494. [Google Scholar] [CrossRef]
- Zhu, S.M.; Feng, J.E.; Zhao, J.L. State feedback for set stabilization of markovian jump Boolean control networks. Discret. Contin. Dyn. Syst.-S 2021, 14, 1591–1605. [Google Scholar] [CrossRef]
- Cheng, D.Z. Disturbance decoupling of Boolean control networks. IEEE Trans. Automat. Control 2020, 56, 2–10. [Google Scholar] [CrossRef]
- Zhang, L.; Feng, J.E.; Yao, J. Controllability and observability of switched Boolean control networks. IET Control. Theory Appl. 2012, 6, 2477–2484. [Google Scholar] [CrossRef]
- Yang, Y.J.; Liu, Y.; Lou, J.G.; Wang, Z. Observability of switched Boolean control networks using algebraic forms. Discret. Contin. Dyn. Syst.-S 2021, 14, 1519–1533. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Wu, Z.G.; Lu, J.; Yu, L. Stabilization and finite stabilization of probabilistic Boolean control networks. IEEE Trans. Syst. Man Cybern. 2021, 51, 1559–1566. [Google Scholar] [CrossRef]
- Toyoda, M.; Wu, Y.H. Mayer-type optimal control of probabilistic Boolean control network with uncertain selection probabilities. IEEE Trans. Cybern. 2021, 51, 3079–3092. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Cao, J.; Wang, L.; Wu, Z.G. On pinning control reachability of probabilistic Boolean control networks. IET Control Theory A 2020, 14, 2914–2923. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liu, Y.S.; Li, H.T. Finite-time controllability and set controllability of impulsive probabilistic Boolean control networks. IEEE Access 2020, 8, 111995–112002. [Google Scholar] [CrossRef]
- Liu, Z.; Zhong, J.; Liu, Y. Weak stabilization of k-valued logical networks. In Proceedings of the 2021 40th Chinese Control Conference, Shanghai, China, 26–28 July 2021; pp. 124–129. [Google Scholar]
- Acernese, A.; Yerudkar, A.; Glielmo, L.; Del Vecchio, C. Reinforcement learning approach to feedback stabilization problem of probabilistic Boolean control networks. IEEE Control Syst. Lett. 2020, 5, 337–342. [Google Scholar] [CrossRef]
- Papagiannis, G.; Moschoyiannis, S. Deep reinforcement learning for control of probabilistic Boolean networks. In Proceedings of the 2020 International Conference on Complex Networks and Their Applications, Madrid, Spain, 1–3 December 2020; pp. 361–371. [Google Scholar]
- Acernese, A.; Yerudkar, A.; Glielmo, L.; Del Vecchio, C. Model-free self-triggered control co-design for probabilistic Boolean control networks. IEEE Control Syst. Lett. 2021, 5, 1639–1644. [Google Scholar] [CrossRef]
- Liu, Z.; Zhong, J.; Liu, Y.; Gui, W. Weak stabilization of Boolean networks under state-flipped control. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–8. [Google Scholar] [CrossRef]
- Zhong, J.; Lu, J.; Huang, T.; Ho, D.W.C. Controllability and synchronization analysis of identical-hierarchy mixed-valued logical control networks. IEEE Trans. Cybern. 2017, 47, 3482–3493. [Google Scholar] [CrossRef]
- Li, Y.; Feng, J.E.; Zhu, S. Controllability and reachability of periodically time-variant mixed-valued logical control networks. Circuits Syst. Signal Process. 2021, 40, 3639–3654. [Google Scholar] [CrossRef]
- Wang, S.; Feng, J.E.; Yu, Y.Y.; Wang, X.H. Data set approach for solving logical equations. Sci. China Inf. Sci. 2020, 63, 169202. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.J.; Renato, D.L.; Fu, S.H.; Xia, J.W.; Qiao, L.S. Event-triggered control design for networked evolutionary games with time invariant delay in strategies. Int. J. Syst. Sci. 2020, 514, 512–522. [Google Scholar] [CrossRef]
- Le, S.T.; Wu, Y.H.; Toyoda, M. A congestion game framework for service chain composition in NFV with function benefit. Inf. Sci. 2021, 52, 493–504. [Google Scholar] [CrossRef]
- Fu, S.H.; Pan, Y.; Feng, J.E.; Zhao, J. Strategy optimisation for coupled evolutionary public good games with threshold. Int. J. Control 2020, 1–10. [Google Scholar] [CrossRef]
- Kitano, H. Systems biology: A brief overview. Science 2002, 295, 1662–1664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.; Xiao, H. Weak reachability of probabilistic Boolean control networks. In Proceedings of the IEEE 2015 International Conference on Advanced Mechatronic Systems, Beijing, China, 22–24 August 2015; pp. 56–60. [Google Scholar]
- Zhang, Q.L.; Feng, J.E.; Wang, B. Set reachability of markovian jump Boolean networks and its applications. IET Control Theory A. 2020, 14, 2914–2923. [Google Scholar] [CrossRef]
- Zhou, R.P.; Guo, Y.Q.; Gui, W. Set reachability and observability of probabilistic Boolean networks. Automatica 2019, 106, 230–241. [Google Scholar] [CrossRef]
- Wu, Y.H.; Xu, J.X.; Sun, X.M.; Wang, W. Observability of Boolean multiplex control networks. Sci. Rep. 2017, 7, 46495. [Google Scholar] [CrossRef] [Green Version]
- Aguda, B.D.; Kim, Y.; Piper-Hunter, M.G. MicroRNA regulation of a cancer network: Consequences of the feedback loops involving miR-17-92, E2F, and Myc. Proc. Natl. Acad. Sci. USA 2008, 105, 19678–19683. [Google Scholar] [CrossRef] [Green Version]
- Coller, H.A.; Forman, J.J.; Legesse-Miller, A. “Myc’ed messages”: Myc induces transcription of E2F1 while inhibiting its translation via a microRNA polycistron. PLoS Genet. 2007, 3, e146. [Google Scholar] [CrossRef] [PubMed] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∑ | P |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; Li, S.; Shan, Y.; Liu, F. Finite-Time Set Reachability of Probabilistic Boolean Multiplex Control Networks. Appl. Sci. 2022, 12, 883. https://doi.org/10.3390/app12020883
Cui Y, Li S, Shan Y, Liu F. Finite-Time Set Reachability of Probabilistic Boolean Multiplex Control Networks. Applied Sciences. 2022; 12(2):883. https://doi.org/10.3390/app12020883
Chicago/Turabian StyleCui, Yuxin, Shu Li, Yunxiao Shan, and Fengqiu Liu. 2022. "Finite-Time Set Reachability of Probabilistic Boolean Multiplex Control Networks" Applied Sciences 12, no. 2: 883. https://doi.org/10.3390/app12020883
APA StyleCui, Y., Li, S., Shan, Y., & Liu, F. (2022). Finite-Time Set Reachability of Probabilistic Boolean Multiplex Control Networks. Applied Sciences, 12(2), 883. https://doi.org/10.3390/app12020883