
An Iterative Guidance and Navigation Algorithm for Orbit Rendezvous of Cooperating CubeSats



Abstract
:1. Introduction
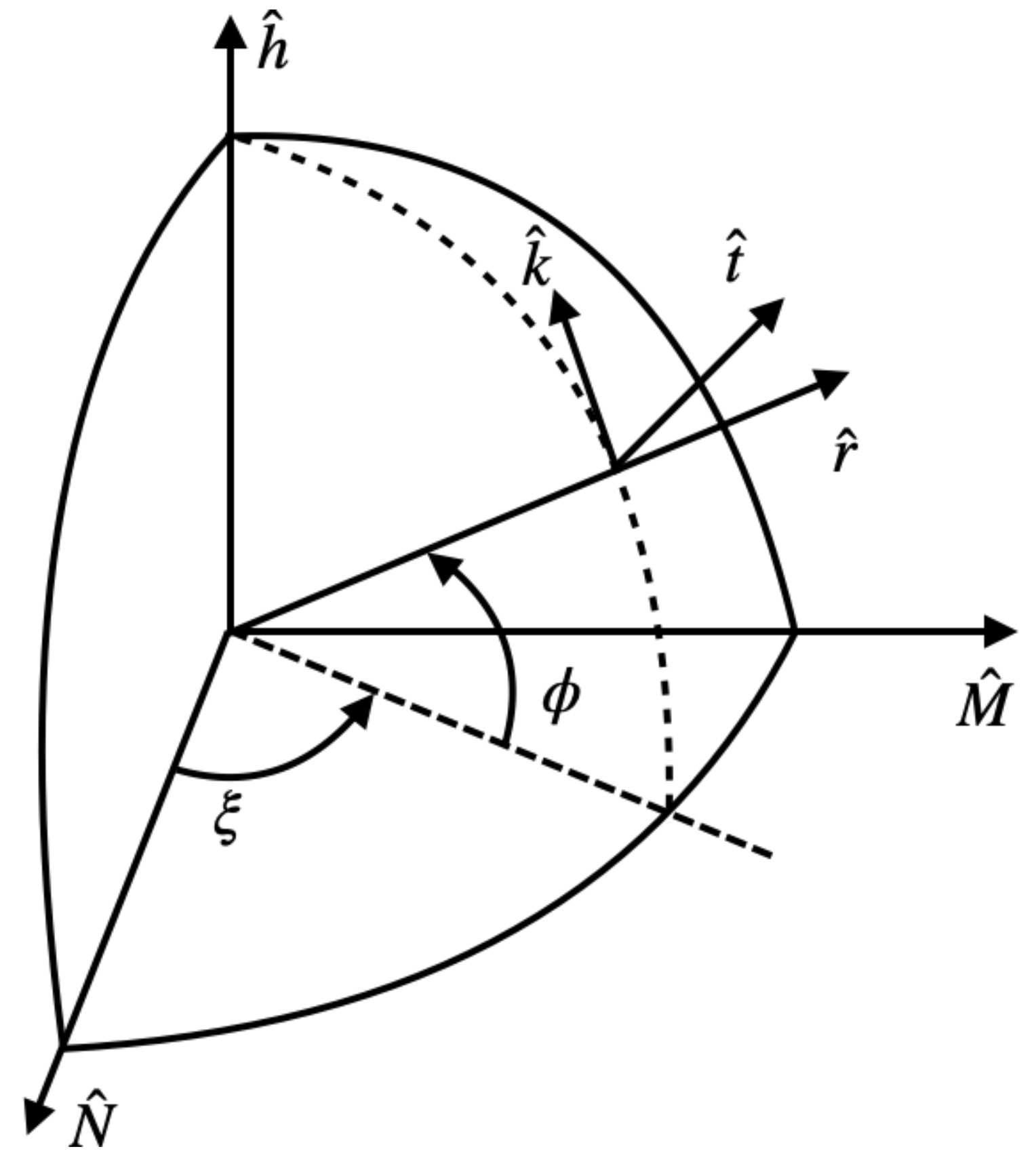
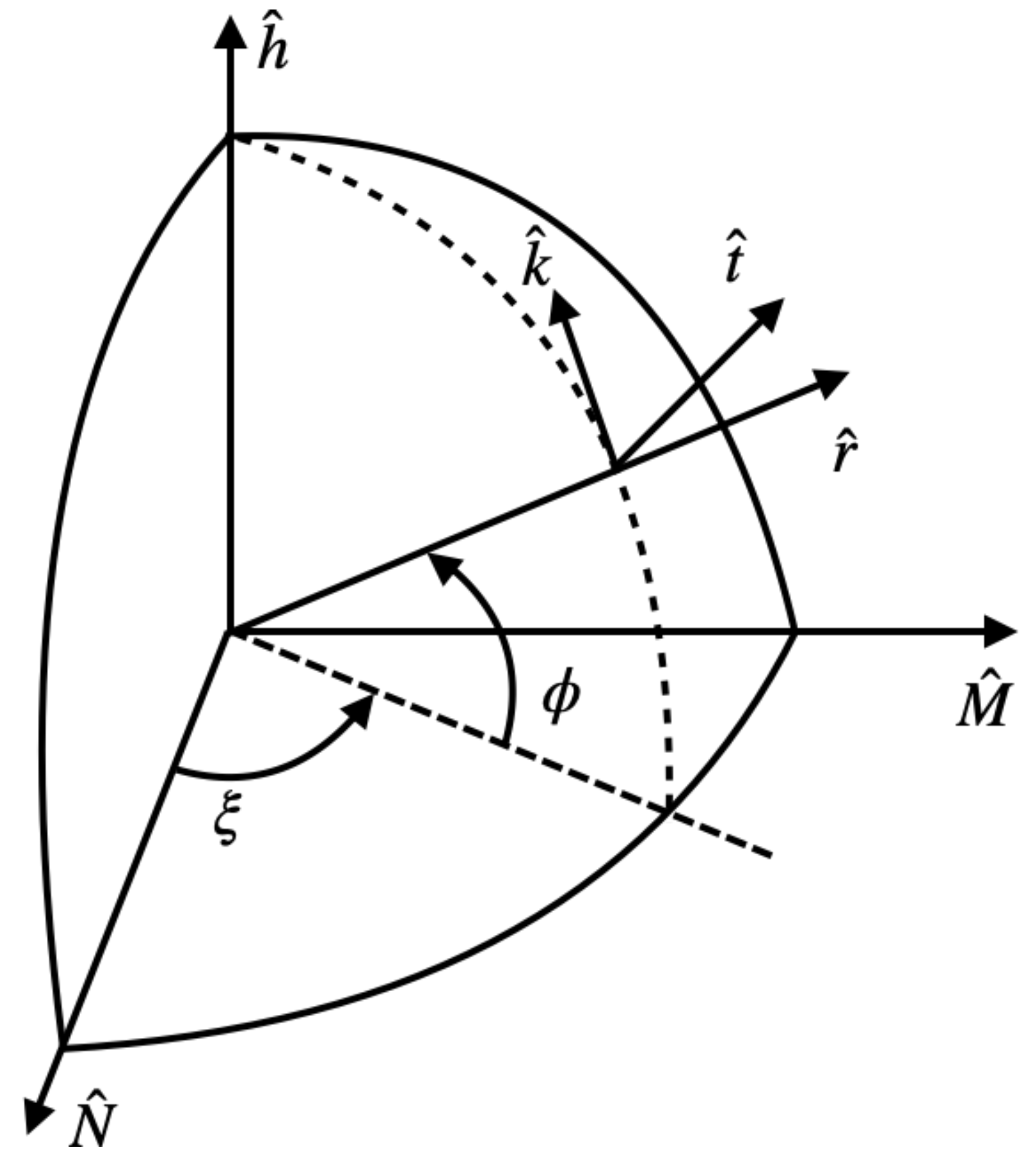
2. Equations of Motion
3. Guidance and Navigation
3.1. Guidance
- calculate ; if , then set ;
- evaluate the displacement vectors and at ;
- calculate by using Equation (8);
- using the definitions of the displaced position and velocity coordinates, obtain the spherical coordinates of position and velocity of the chaser (r, , , , , ) at ;
- propagate numerically the nonlinear Equation (1) in the interval ;
- if , then evaluate at .
3.2. Navigation
4. Numerical Simulations
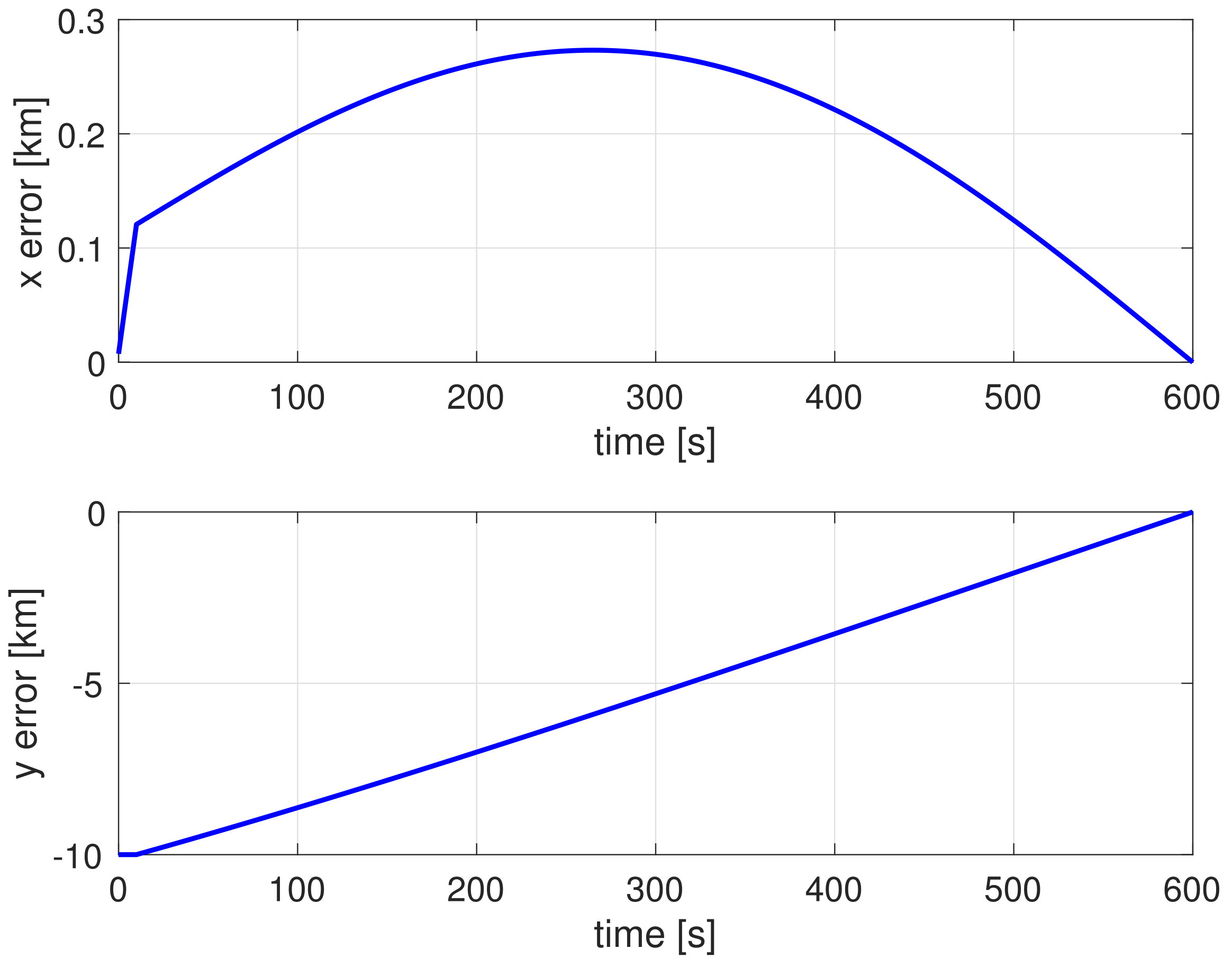
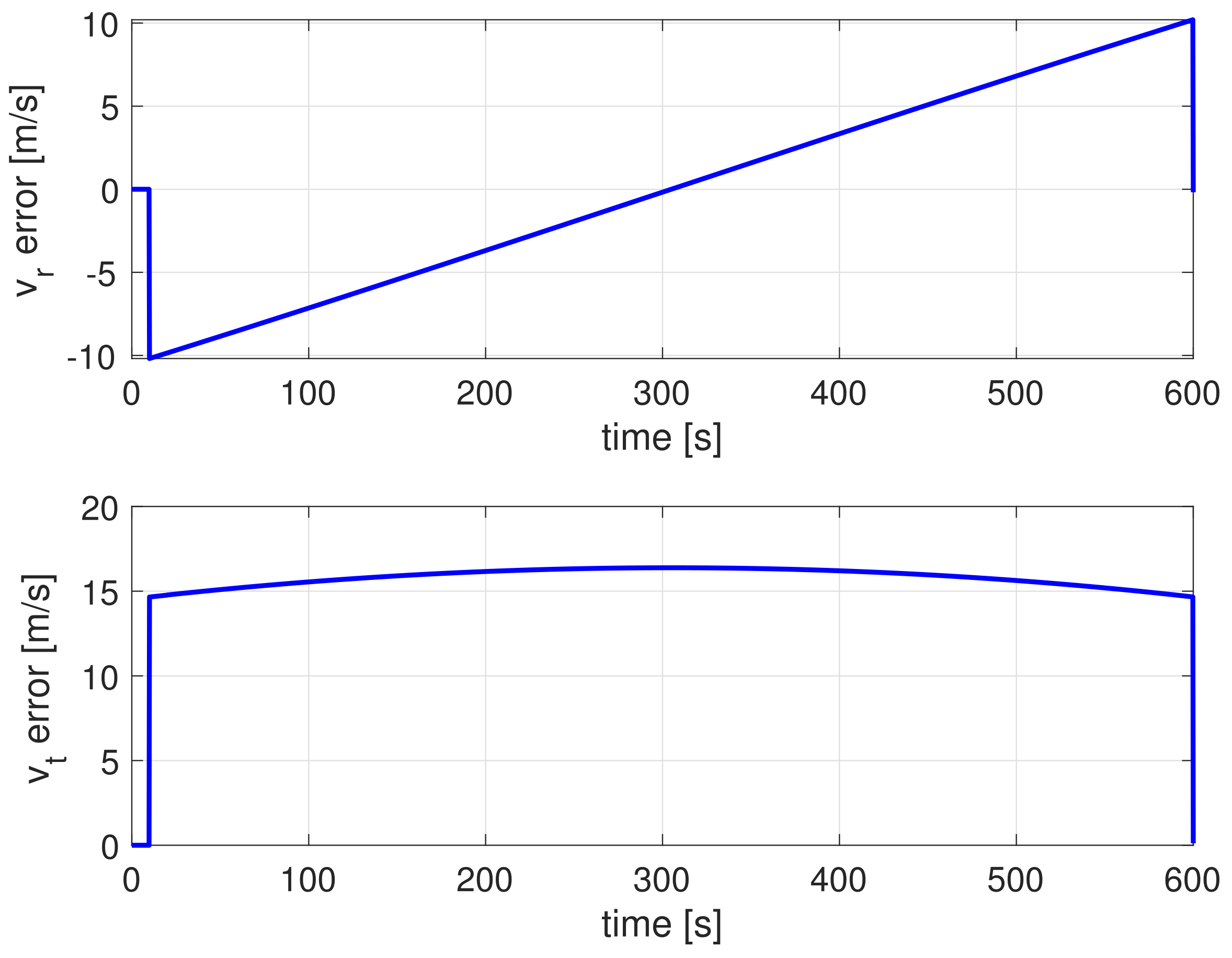
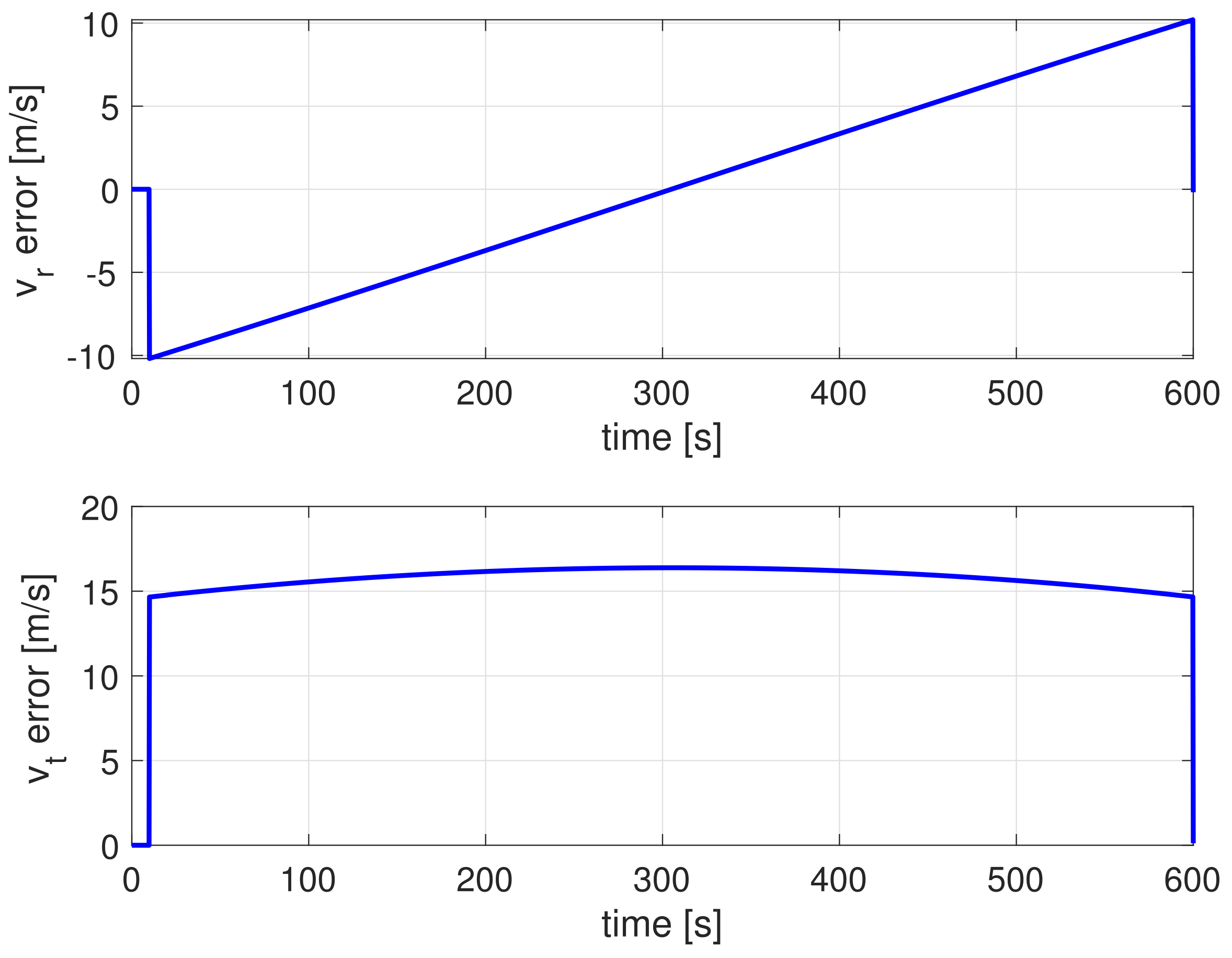
4.1. Nominal Simulation
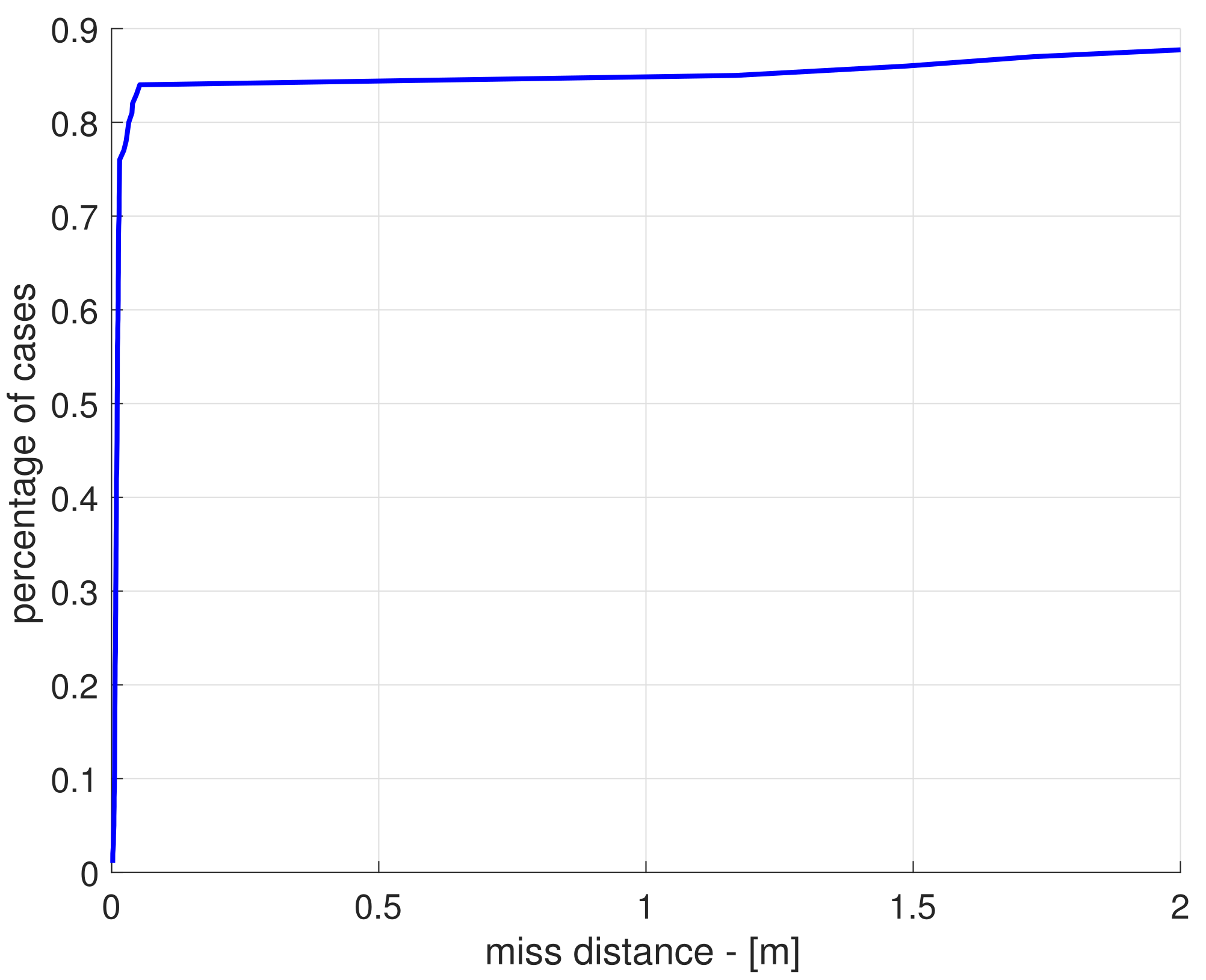
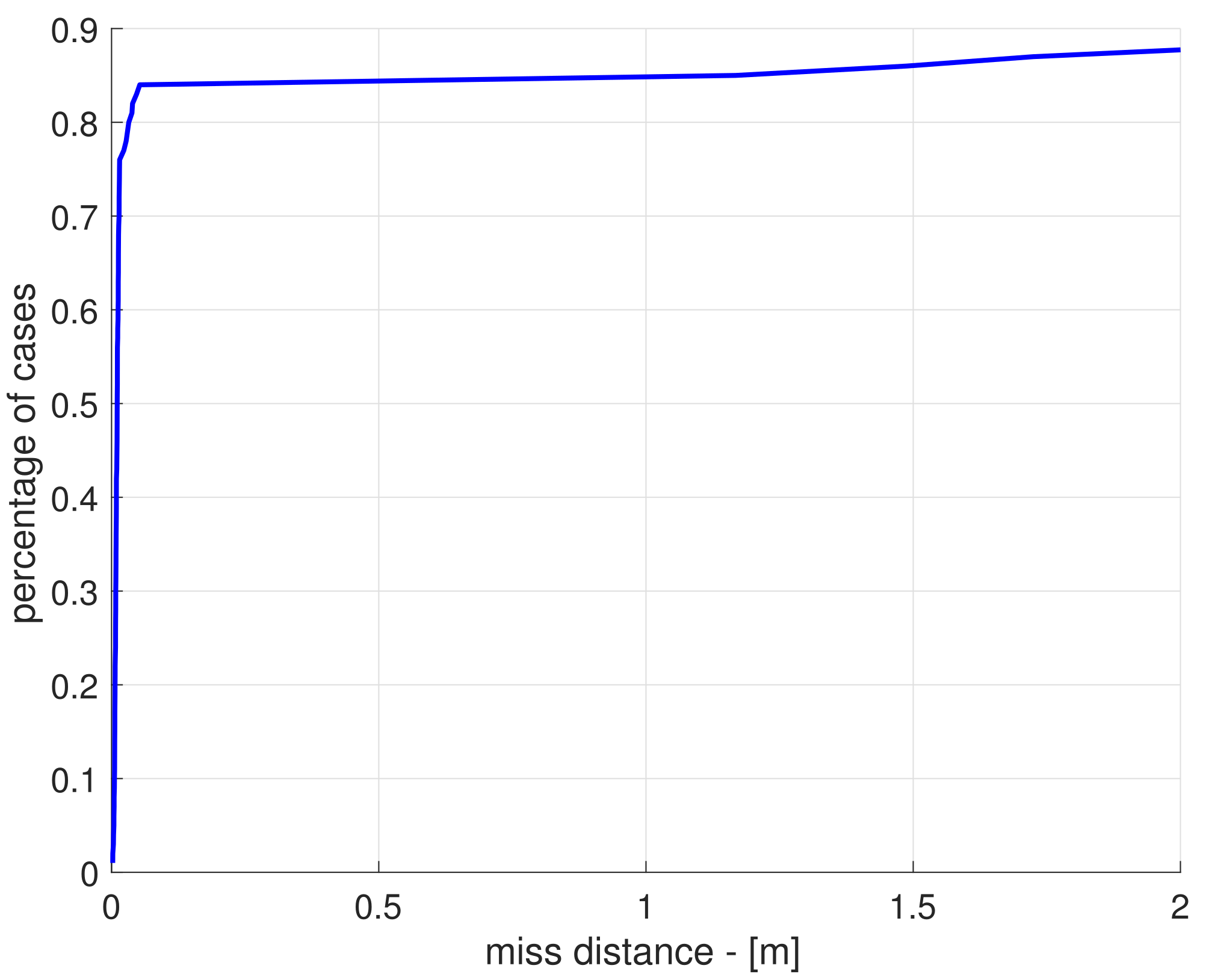
4.2. Monte Carlo Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOF | Degrees Of Freedom |
| EKF | Extended Kalman Filter |
| GNC | Guidance, Navigation, and Control |
| HCW | Hill-Clohessy-Wiltshire |
| ISL | Inter-Satellite Link |
| RAAN | Right Ascension of the Ascending Node |
| UF | Unscented Filter |
References
- D’Amico, S.; Bodin, P.; Delpech, M.; Noteborn, R. Prisma. In Distributed Space Missions for Earth System Monitoring; Springer: Berlin/Heidelberg, Germany, 2013; pp. 599–637. [Google Scholar]
- Gasbarri, P.; Sabatini, M.; Palmerini, G. Ground tests for vision based determination and control of formation flying spacecraft trajectories. Acta Astronaut. 2014, 102, 378–391. [Google Scholar] [CrossRef]
- Forshaw, J.L.; Aglietti, G.S.; Navarathinam, N.; Kadhem, H.; Salmon, T.; Pisseloup, A.; Joffre, E.; Chabot, T.; Retat, I.; Axthelm, R.; et al. RemoveDEBRIS: An in-orbit active debris removal demonstration mission. Acta Astronaut. 2016, 127, 448–463. [Google Scholar] [CrossRef]
- Prussing, J. Optimal Four-Impulse Fixed-Time Rendezvous in the Vicinity of a Circular Orbit. AIAA J. 1969, 7, 928–935. [Google Scholar] [CrossRef]
- Prussing, J. Optimal Two- and Three-Impulse Fixed-Time Rendezvous in the Vicinity of a Circular Orbit. AIAA J. 1970, 8, 1221–1228. [Google Scholar] [CrossRef]
- Carter, T.; Humi, M. Fuel-Optimal Maneuvers of a Spacecraft Relative to a Point in Circular Orbit. J. Guid. Control. Dyn. 1987, 10, 567–573. [Google Scholar] [CrossRef]
- Carter, T. Fuel-Optimal Rendezvous Near a Point in General Keplerian Orbit. J. Guid. Control. Dyn. 1984, 7, 710–716. [Google Scholar] [CrossRef]
- Pontani, M.; Conway, B. Minimum-Fuel Finite-Thrust Relative Orbit Maneuvers via Indirect Heuristic Method. J. Guid. Control. Dyn. 2015, 38, 913–924. [Google Scholar] [CrossRef]
- Prussing, J.E.; Chiu, J.H. Optimal multiple-impulse time-fixed rendezvous between circular orbits. J. Guid. Control. Dyn. 1986, 9, 17–22. [Google Scholar] [CrossRef]
- Pontani, M.; Ghosh, P.; Conway, B.A. Particle swarm optimization of multiple-burn rendezvous trajectories. J. Guid. Control. Dyn. 2012, 35, 1192–1207. [Google Scholar] [CrossRef]
- Hablani, H.B.; Tapper, M.L.; Dana-Bashian, D.J. Guidance and relative navigation for autonomous rendezvous in a circular orbit. J. Guid. Control. Dyn. 2002, 25, 553–562. [Google Scholar] [CrossRef]
- Machuca, P.; Sánchez, J.P. CubeSat Autonomous Navigation and Guidance for Low-Cost Asteroid Flyby Missions. J. Spacecr. Rocket. 2021, 58, 1858–1875. [Google Scholar] [CrossRef]
- Pirat, C.; Ankersen, F.; Walker, R.; Gass, V. and μ-Synthesis for Nanosatellites Rendezvous and Docking. IEEE Trans. Control. Syst. Technol. 2019, 28, 1050–1057. [Google Scholar] [CrossRef]
- Prussing, J.E.; Conway, B.A. Orbital Mechanics; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Pirat, C.; Ankersen, F.; Walker, R.; Gass, V. Vision based navigation for autonomous cooperative docking of CubeSats. Acta Astronaut. 2018, 146, 418–434. [Google Scholar] [CrossRef]
- Segal, S.; Carmi, A.; Gurfil, P. Stereovision-based estimation of relative dynamics between noncooperative satellites: Theory and experiments. IEEE Trans. Control. Syst. Technol. 2013, 22, 568–584. [Google Scholar] [CrossRef]
- Woffinden, D.C.; Geller, D.K. Observability criteria for angles-only navigation. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1194–1208. [Google Scholar] [CrossRef]
- Battistini, S.; Shima, T. Differential games missile guidance with bearings-only measurements. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2906–2915. [Google Scholar] [CrossRef]
- Mok, S.H.; Pi, J.; Bang, H. One-step rendezvous guidance for improving observability in bearings-only navigation. Adv. Space Res. 2020, 66, 2689–2702. [Google Scholar] [CrossRef]
- Geller, D.K.; Klein, I. Angles-only navigation state observability during orbital proximity operations. J. Guid. Control. Dyn. 2014, 37, 1976–1983. [Google Scholar] [CrossRef]
- Cassinis, L.P.; Fonod, R.; Gill, E. Review of the robustness and applicability of monocular pose estimation systems for relative navigation with an uncooperative spacecraft. Prog. Aerosp. Sci. 2019, 110, 100548. [Google Scholar] [CrossRef]
- Ferrari, F.; Franzese, V.; Pugliatti, M.; Giordano, C.; Topputo, F. Preliminary mission profile of Hera’s Milani CubeSat. Adv. Space Res. 2021, 67, 2010–2029. [Google Scholar] [CrossRef]
- Cavenago, F.; Di Lizia, P.; Massari, M.; Wittig, A. On-board spacecraft relative pose estimation with high-order extended Kalman filter. Acta Astronaut. 2019, 158, 55–67. [Google Scholar] [CrossRef]
- Fraser, C.T.; Ulrich, S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation. Acta Astronaut. 2021, 178, 700–721. [Google Scholar] [CrossRef]
- Battistini, S.; Cappelletti, C.; Graziani, F. Results of the attitude reconstruction for the UniSat-6 microsatellite using in-orbit data. Acta Astronaut. 2016, 127, 87–94. [Google Scholar] [CrossRef]
- Tang, X.; Yan, J.; Zhong, D. Square-root sigma-point Kalman filtering for spacecraft relative navigation. Acta Astronaut. 2010, 66, 704–713. [Google Scholar] [CrossRef]
- Menegaz, H.M.; Ishihara, J.Y.; Borges, G.A.; Vargas, A.N. A systematization of the unscented Kalman filter theory. IEEE Trans. Autom. Control. 2015, 60, 2583–2598. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter. In Kalman Filtering and Neural Networks; Wiley: Hoboken, NJ, USA, 2001; pp. 221–280. [Google Scholar]
- Branz, F.; Olivieri, L.; Sansone, F.; Francesconi, A. Miniature docking mechanism for CubeSats. Acta Astronaut. 2020, 176, 510–519. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value | Quantity | Value | Quantity | Value |
|---|---|---|---|---|---|
| 500 m | 1 | 1 | |||
| 1 m/s | 1 m/s | 1 m/s | |||
| 1 | 5 × 10−7 | 600 s | |||
| 0.25 s | 0.25 s |
| Variable | Accuracy | Variable | Accuracy | Variable | Accuracy |
|---|---|---|---|---|---|
| r | 20 m | 0.001 | 0.001 | ||
| 0.25 m/s | 0.4 m/s | 1 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Battistini, S.; De Angelis, G.; Pontani, M.; Graziani, F. An Iterative Guidance and Navigation Algorithm for Orbit Rendezvous of Cooperating CubeSats. Appl. Sci. 2022, 12, 9250. https://doi.org/10.3390/app12189250
Battistini S, De Angelis G, Pontani M, Graziani F. An Iterative Guidance and Navigation Algorithm for Orbit Rendezvous of Cooperating CubeSats. Applied Sciences. 2022; 12(18):9250. https://doi.org/10.3390/app12189250
Chicago/Turabian StyleBattistini, Simone, Giulio De Angelis, Mauro Pontani, and Filippo Graziani. 2022. "An Iterative Guidance and Navigation Algorithm for Orbit Rendezvous of Cooperating CubeSats" Applied Sciences 12, no. 18: 9250. https://doi.org/10.3390/app12189250
APA StyleBattistini, S., De Angelis, G., Pontani, M., & Graziani, F. (2022). An Iterative Guidance and Navigation Algorithm for Orbit Rendezvous of Cooperating CubeSats. Applied Sciences, 12(18), 9250. https://doi.org/10.3390/app12189250