
Surface Defect Detection of Rolled Steel Based on Lightweight Model

Abstract
:1. Introduction
2. Related Works
2.1. The Traditional Methods
2.2. The Deep-Learning-Based Methods
3. Methods and Principles
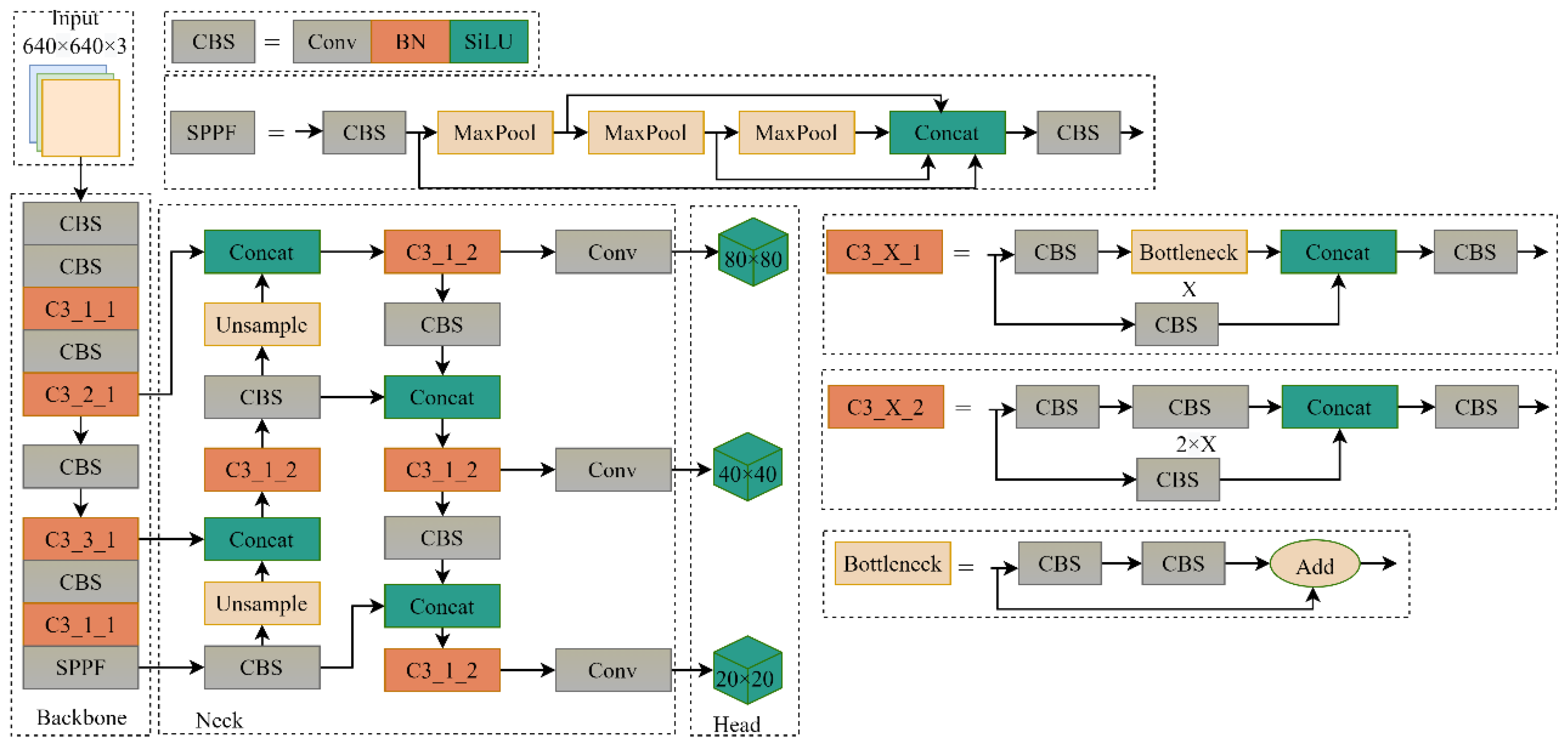
3.1. The Principle of YOLOv5
3.2. The Improved Network
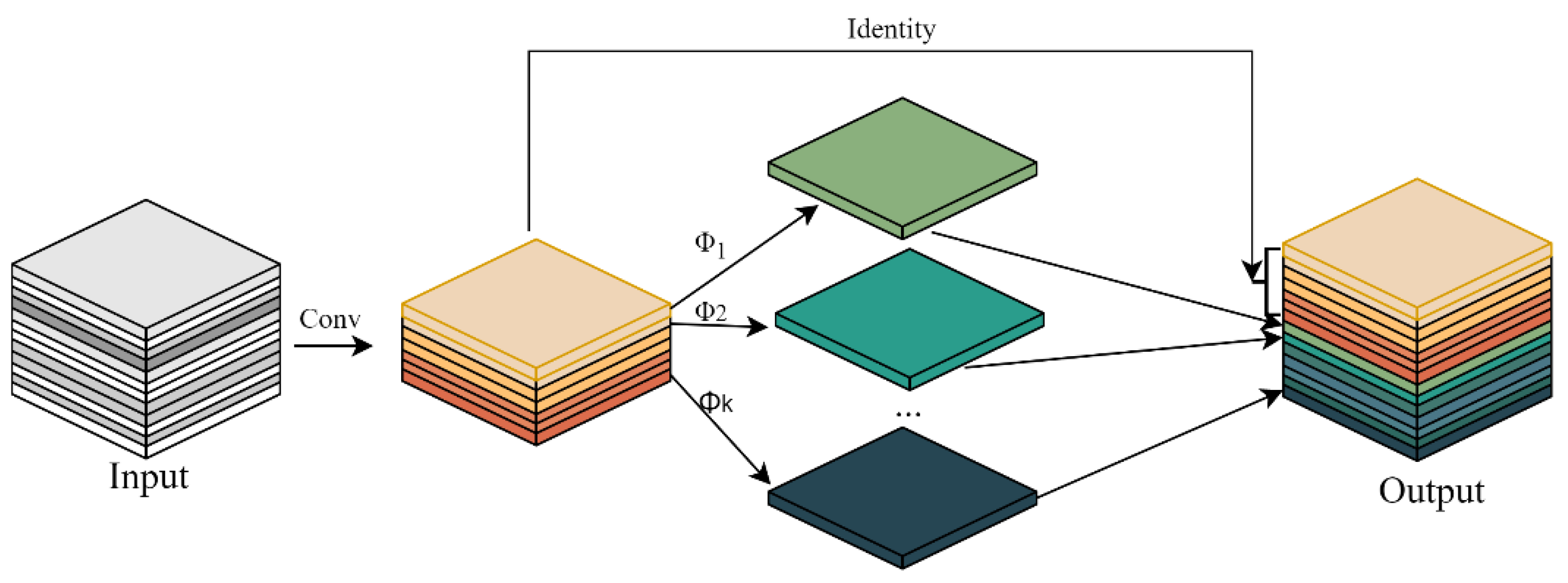
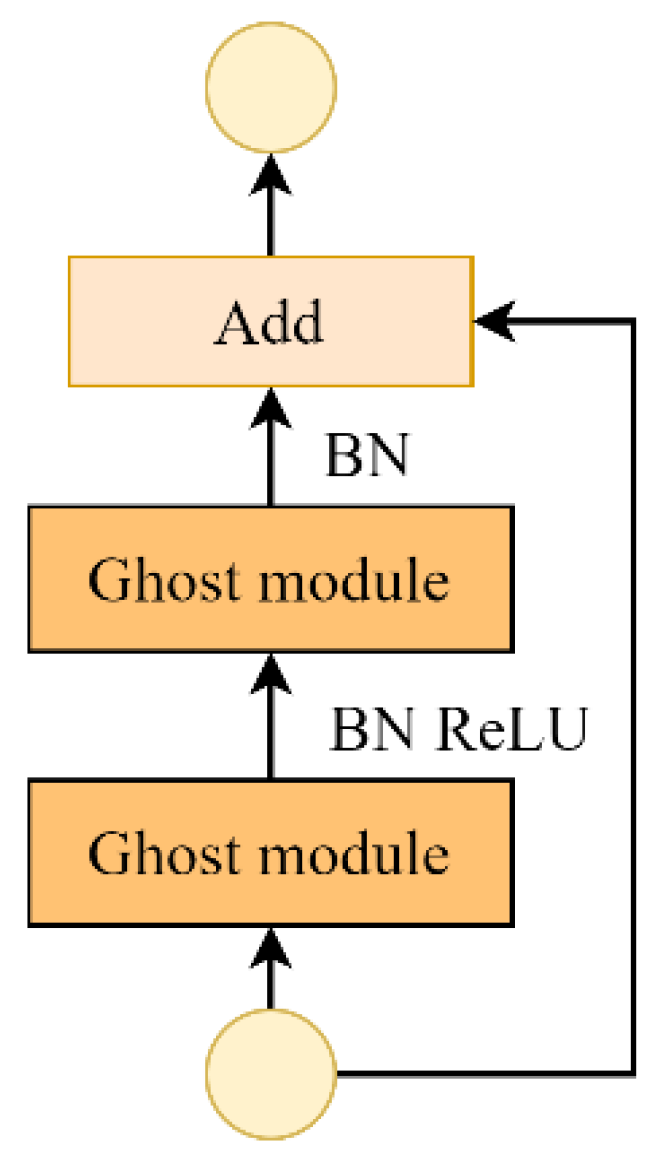
3.2.1. The Lightweight Module
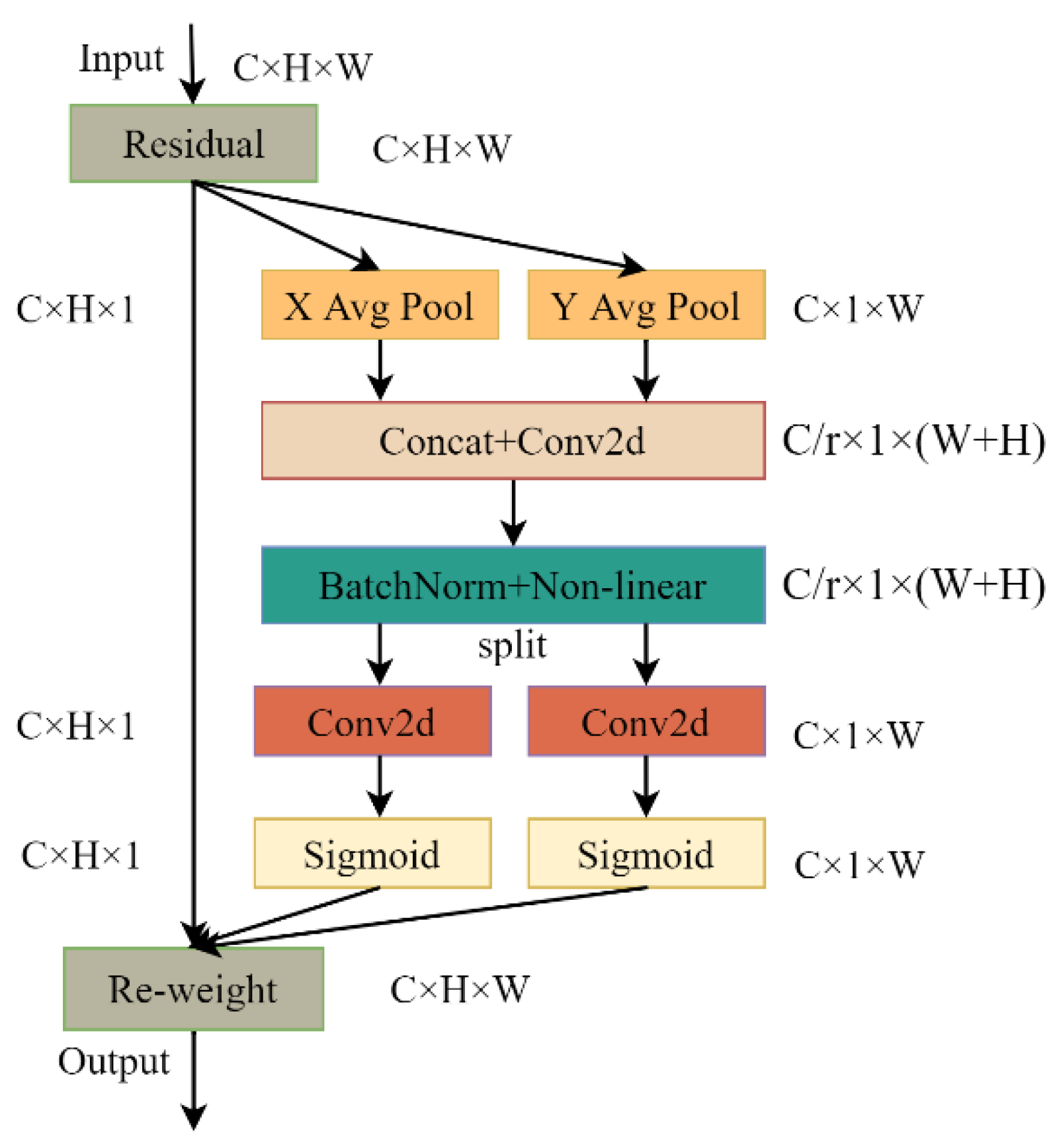
3.2.2. Coordinate Attention Mechanism
3.2.3. The EIoU Function
3.3. Proposed Model
4. Experiment and Results
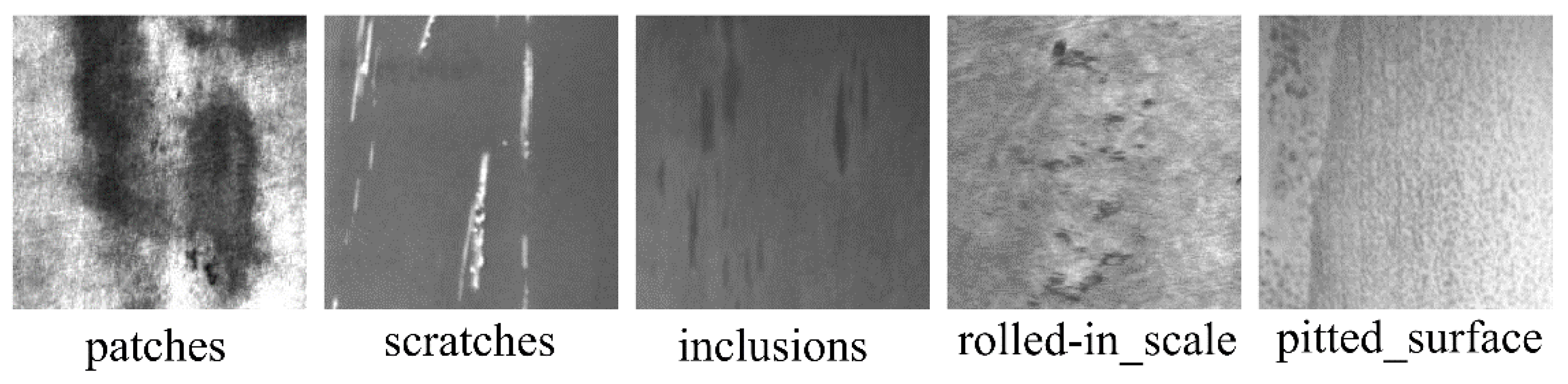
4.1. Experimental Environmen and Dataset
4.2. Training and Evaluation Indicators
4.3. Ablation Studies
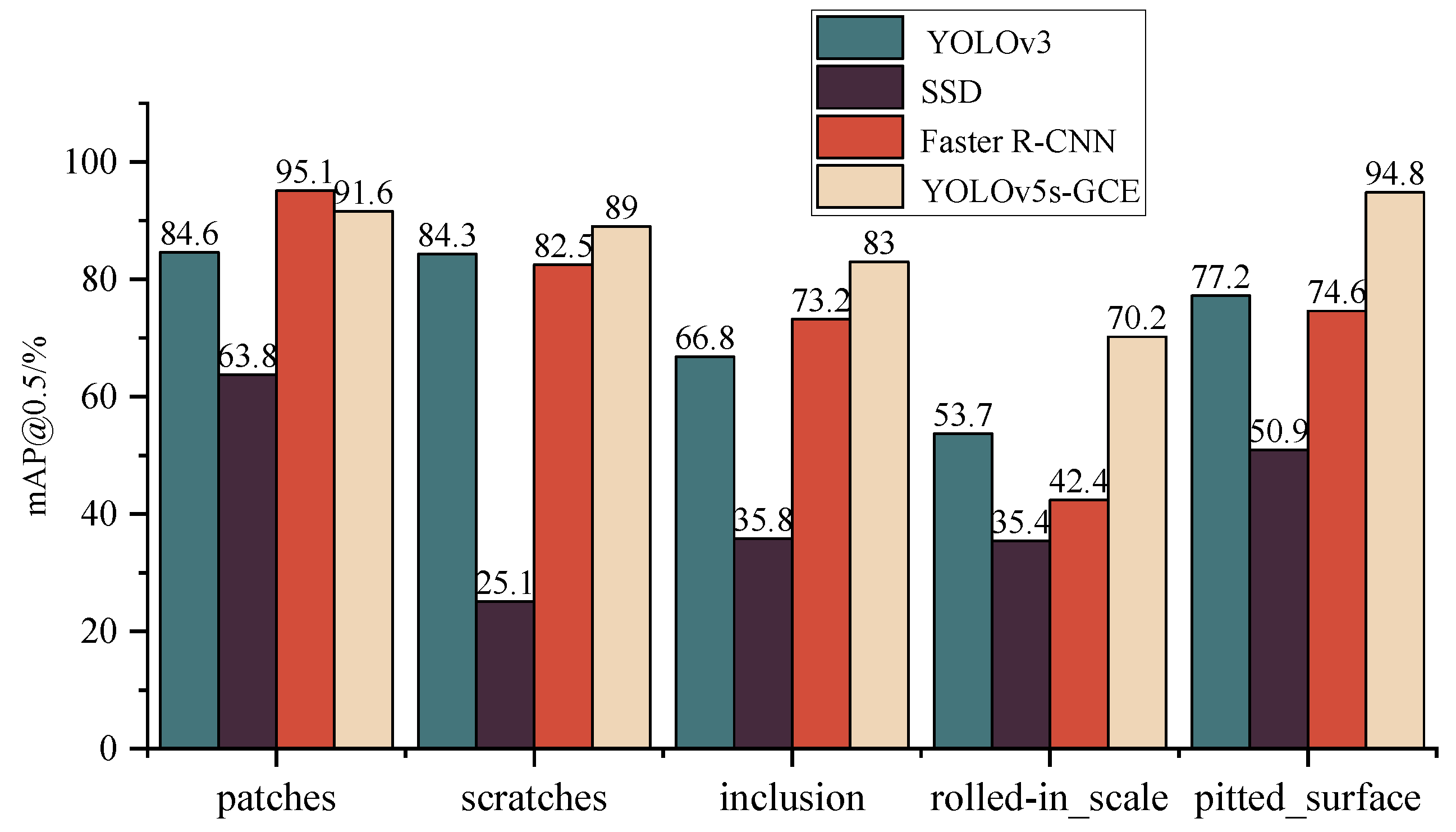
4.4. Comparison Experiment of Different Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, G. Research on Steel Surface Defect Inspection System Based on Computer Vision. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, 2013. [Google Scholar]
- Wu, H.; Lv, Q.; Diraco, G. Hot-Rolled Steel Strip Surface Inspection Based on Transfer Learning Model. J. Sens. 2021, 2021, 6637252. [Google Scholar] [CrossRef]
- Luo, D.; Cai, Y.; Yang, Z.; Zhang, Z.; Zhou, Y.; Bai, X. Survey on industrial defect detection with deep learning. Sci. Sin. 2022, 52, 1002–1039. [Google Scholar] [CrossRef]
- Wang, L. Research on Workpiece Surface Defect Detection Based on Deep Learning. Master’s Thesis, Southwest University of Science and Technology, Mianyang, China, 2022. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; LeCun, Y. Overfeat: Integrated recognition, localization and detection using convolutional networks. arXiv 2013, arXiv:1312.6229. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 12 December 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Tan, M.; Le, Q. Efficientnet: Rethinking model scaling for convolutional neural networks. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 10–15 June 2019; pp. 6105–6114. [Google Scholar]
- Howard, A.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6848–6856. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More Features From Cheap Operations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1580–1589. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Li, J.; Quan, X.; Wang, Y. Research on Defect Detection Algorithm of Ceramic Tile Surface with Multi-feature Fusion. Comput. Eng. Appl. 2020, 56, 191–198. [Google Scholar]
- Ma, C.; Zhang, T. Digital Printing Defect Detection System based on SURF Algorithm. Light Ind. Mach. 2021, 39, 52–56. [Google Scholar]
- Guo, J.; Xu, J.; Zuo, H.; Fei, H.; Zhong, Z.; Xu, X. Civil Aircraft Surface Defects Detection Based on Histogram of Oriented Gradient. In Proceedings of the IEEE International Conference on Civil Aviation Safety and Information Technology, Kunming, China, 17–19 October 2019; pp. 34–38. [Google Scholar]
- Zhang, T.; Liu, Y.; Yang, Y.; Wang, X.; Jin, Y. Review of Surface Defect Detection Based on Machine Vision. Sci. Technol. Eng. 2020, 20, 14366–14376. [Google Scholar]
- Guo, H.; Xu, W.; Liu, Y. Steel Plate Surface Defect Recognition Based on Support Vector Machine. J. Donghua Univ. 2018, 44, 635–639. [Google Scholar]
- Hua, C.; Zhou, H. Study on Surface Defect Recognition of Cold Rolled Steel Strip by Improving Combination Classifier. Mech. Sci. Technol. Aerosp. Eng. 2017, 36, 1785–1790. [Google Scholar]
- Guo, C.; Zhang, Z. The design on surface defects detection system of cylindricaldiode based on decision tree learning. Inf. Technol. Netw. Secur. 2015, 34, 39–41. [Google Scholar]
- Weng, Y.; Xiao, J.; Xia, Y. Strip Steel Surface Defect Detection Based on Improved Mask R-CNN Algorithm. Comput. Eng. Appl. 2021, 57, 235–242. [Google Scholar]
- Li, W.; Ye, X.; Zhao, Y.; Wang, W. Strip Steel Surface Defect Detection Based on Improved YOLOv3 Algorithm. Acta Electron. Sin. 2020, 48, 1284–1292. [Google Scholar]
- Yuan, H.; Du, G.; Yu, Z.; Wei, X. Fast Identification of Steel Surface Defects Based on Lightweight Neural Network. Sci. Technol. Eng. 2021, 21, 14651–14656. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Lin, Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2117–2125. [Google Scholar]
- Wang, W.; Xie, E.; Song, X.; Zang, Y.; Wang, W.; Lu, T.; Yu, G.; Shen, C. Efficient and Accurate Arbitrary-Shaped Text Detection With Pixel Aggregation Network. In Proceedings of the IEEE International Conference on Computer Vision, Long Beach, CA, USA, 10–15 June 2019; pp. 8440–8449. [Google Scholar]
- Neubeck, A.; Van Gool, L. Efficient Non-Maximum Suppression. In Proceedings of the International Conference on Pattern Recognition, Hong Kong, China, 20–24 August 2006; pp. 850–855. [Google Scholar]
- Zheng, Z.; Wang, P.; Ren, D.; Liu, W.; Ye, R.; Hu, Q.; Zuo, W. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation. IEEE Trans. Cybern. 2022, 52, 8574–8586. [Google Scholar] [CrossRef] [PubMed]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate Attention for Efficient Mobile Network Design. In Proceedings of the IEEE International Conference on Computer Vision, Nashville, TN, USA, 20–25 June 2021; pp. 13713–13722. [Google Scholar]
- Zhang, Y.; Ren, W.; Zhang, Z.; Jia, Z.; Wang, L.; Tan, T. Focal and Efficient IOU Loss for Accurate Bounding Box Regression. Neurocomputing 2022, 506, 146–157. [Google Scholar] [CrossRef]
- Luo, Q.; Fang, X.; Liu, L.; Yang, C.; Sun, Y. Automated Visual Defect Detection for Flat Steel Surface: A Survey. IEEE Trans. Instrum. Meas. 2020, 69, 626–644. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Parameters | GFLOPs | Weight/MB | mAP@0.5/% | fps |
|---|---|---|---|---|---|
| YOLOv5s | 7,033,114 | 15.8 | 13.8 | 82.2 | 62.5 |
| YOLOv5s-G | 3,695,330 | 8.1 | 7.5 | 84.0 | 62.5 |
| YOLOv5s-C | 7,057,274 | 15.8 | 13.9 | 83.6 | 58.8 |
| YOLOv5s-E | 7,033,114 | 15.8 | 13.8 | 82.7 | 76.9 |
| YOLOv5s-GCE | 3,719,490 | 8.1 | 7.6 | 85.7 | 58.8 |
| Model | Parameters | GFLOPs | Weight/MB | mAP@0.5/% | fps |
|---|---|---|---|---|---|
| YOLOv3 | 61,545,000 | 65.6 | 235.1 | 73.3 | 34.1 |
| SSD | 26,285,000 | 62.7 | 92.6 | 42.2 | 52.6 |
| Faster R-CNN | 137,099,000 | 370.2 | 108.3 | 73.6 | 7.9 |
| YOLOv5s-GCE | 3,719,490 | 8.1 | 7.6 | 85.7 | 58.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Zeng, Y.; Li, S.; Zhu, H.; Liu, X.; Zhang, X. Surface Defect Detection of Rolled Steel Based on Lightweight Model. Appl. Sci. 2022, 12, 8905. https://doi.org/10.3390/app12178905
Zhou S, Zeng Y, Li S, Zhu H, Liu X, Zhang X. Surface Defect Detection of Rolled Steel Based on Lightweight Model. Applied Sciences. 2022; 12(17):8905. https://doi.org/10.3390/app12178905
Chicago/Turabian StyleZhou, Shunyong, Yalan Zeng, Sicheng Li, Hao Zhu, Xue Liu, and Xin Zhang. 2022. "Surface Defect Detection of Rolled Steel Based on Lightweight Model" Applied Sciences 12, no. 17: 8905. https://doi.org/10.3390/app12178905
APA StyleZhou, S., Zeng, Y., Li, S., Zhu, H., Liu, X., & Zhang, X. (2022). Surface Defect Detection of Rolled Steel Based on Lightweight Model. Applied Sciences, 12(17), 8905. https://doi.org/10.3390/app12178905