
A Fast and Simple Method for Absolute Orientation Estimation Using a Single Vanishing Point


Abstract
:1. Introduction
2. Materials and Methods
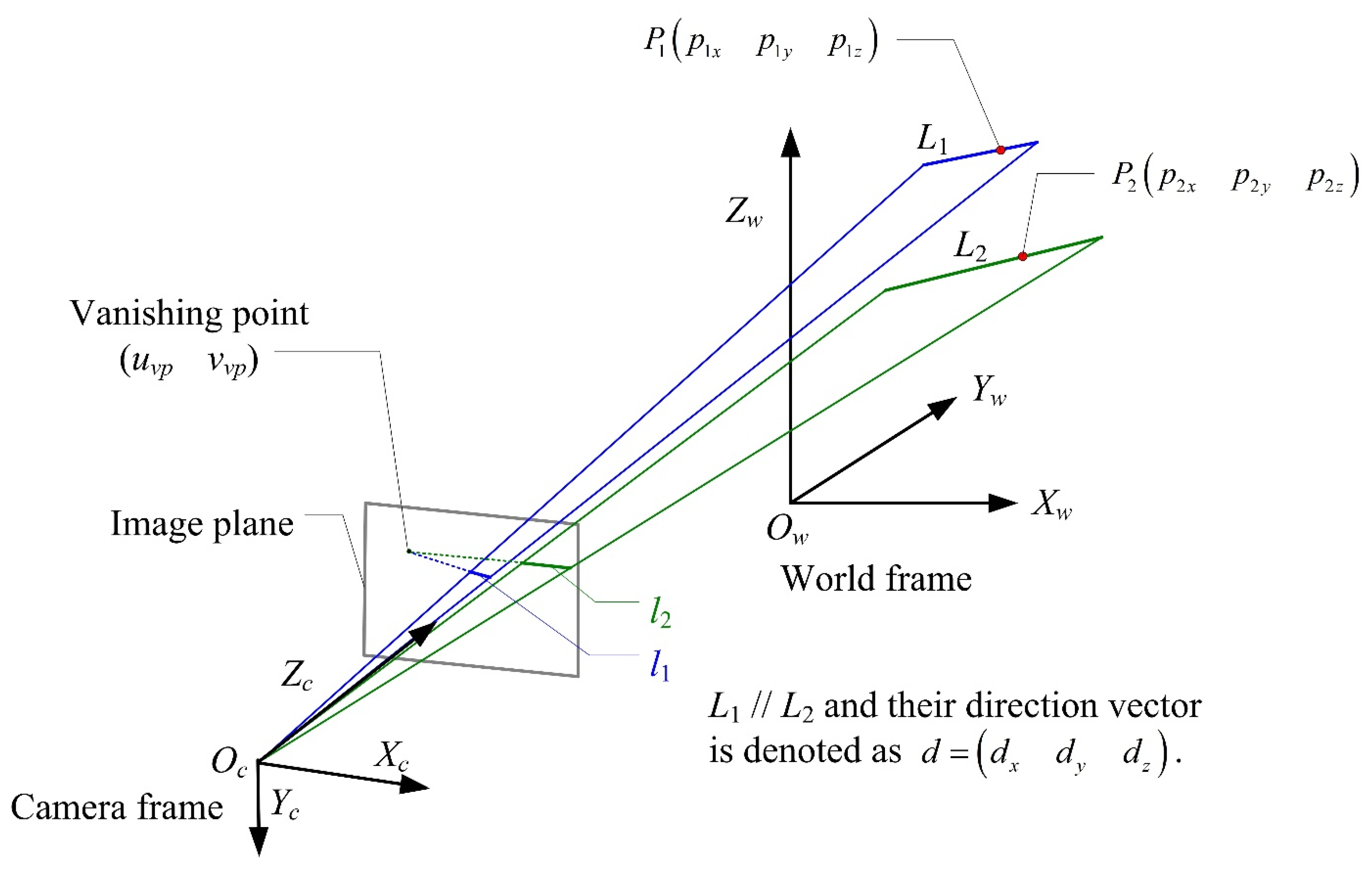
2.1. Vanishing Point and Method Statement
2.2. Orientation Refining
2.3. Limitation of Parallel Lines
3. Experiments and Results
3.1. Synthetic Data
3.1.1. Robustness to Roll Angle Noise
3.1.2. Numerical Stability
3.1.3. Noise Sensitivity
3.1.4. Computational Speed
3.2. Real Images
4. Discussion
4.1. Difference and Advantage
4.2. Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Grunert, J.A. Das pothenotische Problem in erweiterter Gestalt nebst über seine Anwendungen in der Geodäsie. Grunerts Arch. Math. Phys. 1841, Band 1, 238–248. [Google Scholar]
- Lourakis, M.; Terzakis, G. A globally optimal method for the PnP problem with MRP rotation parameterization. In Proceedings of the International Conference on Pattern Recognition, Milan, Italy, 10–15 January 2021; pp. 3058–3063. [Google Scholar]
- Yu, Q.; Xu, G.; Zhang, L.; Shi, J. A consistently fast and accurate algorithm for estimating camera pose from point correspondences. Measurement 2021, 172, 108914. [Google Scholar] [CrossRef]
- Wang, P.; Xu, G.; Wang, Z.; Cheng, Y. An efficient solution to the perspective-three-point pose problem. Comput. Vis. Image Underst. 2018, 166, 81–87. [Google Scholar] [CrossRef]
- Kneip, L.; Scaramuzza, D.; Siegwart, R. A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2969–2976. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. Epnp: An accurate o (n) solution to the pnp problem. Int. J. Comput. Vis. 2009, 81, 155. [Google Scholar] [CrossRef]
- Meng, C.; Xu, W. ScPnP: A non-iterative scale compensation solution for PnP problems. Image Vis. Comput. 2021, 106, 104085. [Google Scholar] [CrossRef]
- Guo, K.; Ye, H.; Gu, J.; Chen, H. A Novel Method for Intrinsic and Extrinsic Parameters Estimation by Solving Perspective-Three-Point Problem with Known Camera Position. Appl. Sci. 2021, 11, 6014. [Google Scholar] [CrossRef]
- Li, J.; Hu, Q.; Zhong, R.; Ai, M. Exterior orientation revisited: A robust method based on lq-norm. Photogramm. Eng. Remote Sens. 2017, 83, 47–56. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Schweighofer, G.; Pinz, A. Globally Optimal O (n) Solution to the PnP Problem for General Camera Models. In Proceedings of the British Machine Vision Conference, Leeds, UK, 1–4 September 2008; pp. 1–10. [Google Scholar]
- Zheng, E.; Wu, C. Structure from motion using structure-less resection. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2075–2083. [Google Scholar]
- Bazargani, H.; Laganière, R. Camera calibration and pose estimation from planes. IEEE Instrum. Meas. Mag. 2015, 18, 20–27. [Google Scholar] [CrossRef]
- Cao, M.; Zheng, L.; Jia, W.; Lu, H.; Liu, X. Accurate 3-D reconstruction under IoT environments and its applications to augmented reality. IEEE Trans. Ind. Inform. 2020, 17, 2090–2100. [Google Scholar] [CrossRef]
- Jiang, N.; Lin, D.; Do, M.N.; Lu, J. Direct structure estimation for 3D reconstruction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2655–2663. [Google Scholar]
- Zhou, L.; Koppel, D.; Kaess, M. A Complete, Accurate and Efficient Solution for the Perspective-N-Line Problem. IEEE Robot. Autom. Lett. 2020, 6, 699–706. [Google Scholar] [CrossRef]
- Yu, Q.; Xu, G.; Wang, Z.; Li, Z. An efficient and globally optimal solution to perspective-n-line problem. Chin. J. Aeronaut. 2022, 35, 400–407. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, C.; Lee, K.M.; Koch, R. Robust and efficient pose estimation from line correspondences. In Proceedings of the Asian Conference on Computer Vision, Daejeon, Korea, 5–9 November 2012; pp. 217–230. [Google Scholar]
- Guo, K.; Ye, H.; Chen, H.; Gao, X. A New Method for Absolute Pose Estimation with Unknown Focal Length and Radial Distortion. Sensors 2022, 22, 1841. [Google Scholar] [CrossRef]
- Bujnák, M. Algebraic Solutions to Absolute Pose Problems. Ph. D. Thesis, Czech Technical University, Prague, Czech Republic, 2012. [Google Scholar]
- Camposeco, F.; Cohen, A.; Pollefeys, M.; Sattler, T. Hybrid camera pose estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 136–144. [Google Scholar]
- Crandall, D.J.; Owens, A.; Snavely, N.; Huttenlocher, D.P. SfM with MRFs: Discrete-continuous optimization for large-scale structure from motion. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 2841–2853. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Hu, Z. PnP problem revisited. J. Math. Imaging Vis. 2006, 24, 131–141. [Google Scholar] [CrossRef]
- Cao, M.W.; Jia, W.; Zhao, Y.; Li, S.J.; Liu, X.P. Fast and robust absolute camera pose estimation with known focal length. Neural Comput. Appl. 2018, 29, 1383–1398. [Google Scholar] [CrossRef]
- Zheng, Y.; Kuang, Y.; Sugimoto, S.; Astrom, K.; Okutomi, M. Revisiting the pnp problem: A fast, general and optimal solution. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2344–2351. [Google Scholar]
- Hesch, J.A.; Roumeliotis, S.I. A direct least-squares (DLS) method for PnP. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 383–390. [Google Scholar]
- Ke, T.; Roumeliotis, S.I. An efficient algebraic solution to the perspective-three-point problem. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7225–7233. [Google Scholar]
- Li, S.; Xu, C. A stable direct solution of perspective-three-point problem. Int. J. Pattern Recognit. Artif. Intell. 2011, 25, 627–642. [Google Scholar] [CrossRef]
- Gao, X.S.; Hou, X.R.; Tang, J.; Cheng, H.F. Complete solution classification for the perspective-three-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 930–943. [Google Scholar]
- Bujnak, M.; Kukelova, Z.; Pajdla, T. A general solution to the P4P problem for camera with unknown focal length. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Abidi, M.A.; Chandra, T. A new efficient and direct solution for pose estimation using quadrangular targets: Algorithm and evaluation. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 534–538. [Google Scholar] [CrossRef]
- Kukelova, Z.; Bujnak, M.; Pajdla, T. Real-time solution to the absolute pose problem with unknown radial distortion and focal length. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2816–2823. [Google Scholar]
- Triggs, B. Camera pose and calibration from 4 or 5 known 3d points. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Corfu, Greece, 20–25 September 1999; Volume 1, pp. 278–284. [Google Scholar]
- Bujnak, M.; Kukelova, Z.; Pajdla, T. New efficient solution to the absolute pose problem for camera with unknown focal length and radial distortion. In Proceedings of the Asian Conference on Computer Vision, Queenstown, New Zealand, 8–12 November 2010; pp. 11–24. [Google Scholar]
- Huang, K.; Ziauddin, S.; Zand, M.; Greenspan, M. One shot radial distortion correction by direct linear transformation. In Proceedings of the IEEE International Conference on Image Processing, Abu Dhabi, United Arab Emirates, 25–28 October 2020; pp. 473–477. [Google Scholar]
- Zhao, Z.; Ye, D.; Zhang, X.; Chen, G.; Zhang, B. Improved Direct Linear Transformation for Parameter Decoupling in Camera Calibration. Algorithms 2016, 9, 31. [Google Scholar] [CrossRef]
- Guo, K.; Ye, H.; Zhao, Z.; Gu, J. An efficient closed form solution to the absolute orientation problem for camera with unknown focal length. Sensors 2021, 21, 6480. [Google Scholar] [CrossRef]
- D’Alfonso, L.; Garone, E.; Muraca, P.; Pugliese, P. On the use of IMUs in the PnP Problem. In Proceedings of the International Conference on Robotics and Automation, Hong Kong, China, 31 May–5 June 2014; pp. 914–919. [Google Scholar]
- Kukelova, Z.; Bujnak, M.; Pajdla, T. Closed-form solutions to minimal absolute pose problems with known vertical direction. In Proceedings of the Asian Conference on Computer Vision, Queenstown, New Zealand, 8–12 November 2010; pp. 216–229. [Google Scholar]
- Přibyl, B.; Zemčík, P.; Čadík, M. Absolute pose estimation from line correspondences using direct linear transformation. Comput. Vis. Image Underst. 2017, 161, 130–144. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, L.; Cheng, L.; Koch, R. Pose estimation from line correspondences: A complete analysis and a series of solutions. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1209–1222. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Xu, G.; Cheng, Y.; Yu, Q. Camera pose estimation from lines: A fast, robust and general method. Mach. Vis. Appl. 2019, 30, 603–614. [Google Scholar] [CrossRef]
- Lecrosnier, L.; Boutteau, R.; Vasseur, P.; Savatier, X.; Fraundorfer, F. Camera pose estimation based on PnL with a known vertical direction. IEEE Robot. Autom. Lett. 2019, 4, 3852–3859. [Google Scholar] [CrossRef]
- Caprile, B.; Torre, V. Using vanishing points for camera calibration. Int. J. Comput. Vis. 1990, 4, 127–139. [Google Scholar] [CrossRef]
- Guillou, E.; Meneveaux, D.; Maisel, E.; Bouatouch, K. Using vanishing points for camera calibration and coarse 3D reconstruction from a single image. Vis. Comput. 2000, 16, 396–410. [Google Scholar] [CrossRef]
- He, B.W.; Li, Y.F. Camera calibration from vanishing points in a vision system. Opt. Laser Technol. 2008, 40, 555–561. [Google Scholar] [CrossRef]
- Chang, H.; Tsai, F. Vanishing point extraction and refinement for robust camera calibration. Sensors 2017, 18, 63. [Google Scholar] [CrossRef]
- Grammatikopoulos, L.; Karras, G.; Petsa, E. Camera calibration combining images with two vanishing points. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 99–104. [Google Scholar]
- Orghidan, R.; Salvi, J.; Gordan, M.; Orza, B. Camera calibration using two or three vanishing points. In Proceedings of the Federated Conference on Computer Science and Information Systems, Wroclaw, Poland, 9–12 September 2012; pp. 123–130. [Google Scholar]
- Xsens. Available online: www.xsens.com (accessed on 31 May 2022).
- Furukawa, Y.; Hernández, C. Multi-view stereo: A tutorial. Found. Trends® Comput. Graph. Vis. 2015, 9, 1–148. [Google Scholar] [CrossRef]
- Madsen, K.; Nielsen, H.B.; Tingleff, O. Methods for Non-Linear Least Squares Problems, 2nd ed.; Informatics and Mathematical Modelling; Technical University of Denmark: Lyngby, Denmark, 2004. [Google Scholar]
- Li, S.; Xu, C.; Xie, M. A robust O (n) solution to the perspective-n-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1444–1450. [Google Scholar] [CrossRef] [PubMed]
- South Survey. Available online: www.southsurvey.com/product-2170.html (accessed on 27 March 2022).
- Tippetts, B.; Lee, D.J.; Lillywhite, K.; Archibald, J. Review of stereo vision algorithms and their suitability for resource-limited systems. J. Real-Time Image Process. 2016, 11, 5–25. [Google Scholar] [CrossRef]
- Aguilar, J.J.; Torres, F.; Lope, M.A. Stereo vision for 3D measurement: Accuracy analysis, calibration and industrial applications. Measurement 1996, 18, 193–200. [Google Scholar] [CrossRef]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Liu, J.; Jakas, A.; Al-Obaidi, A.; Liu, Y. A comparative study of different corner detection methods. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation, Daejeon, Korea, 15–18 December 2009; pp. 509–514. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Our Proposed Method | P3P | RPnP |
|---|---|---|---|
| Computational time/ms | 0.2625 | 0.7500 | 0.8063 |
| Method | Proposed Method | P3P | RPnP |
|---|---|---|---|
| Position error/m | 0.043 | 0.105 | 0.0915 |
| Reprojection error/pixel | 0.37 | 0.80 | 0.54 |
| Method | Proposed Method | P3P | RPnP |
|---|---|---|---|
| Position error/m | 0.049 | 0.129 | 0.114 |
| Reprojection error/pixel | 0.46 | 0.94 | 0.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Ye, H.; Gu, J.; Tian, Y. A Fast and Simple Method for Absolute Orientation Estimation Using a Single Vanishing Point. Appl. Sci. 2022, 12, 8295. https://doi.org/10.3390/app12168295
Guo K, Ye H, Gu J, Tian Y. A Fast and Simple Method for Absolute Orientation Estimation Using a Single Vanishing Point. Applied Sciences. 2022; 12(16):8295. https://doi.org/10.3390/app12168295
Chicago/Turabian StyleGuo, Kai, Hu Ye, Junhao Gu, and Ye Tian. 2022. "A Fast and Simple Method for Absolute Orientation Estimation Using a Single Vanishing Point" Applied Sciences 12, no. 16: 8295. https://doi.org/10.3390/app12168295
APA StyleGuo, K., Ye, H., Gu, J., & Tian, Y. (2022). A Fast and Simple Method for Absolute Orientation Estimation Using a Single Vanishing Point. Applied Sciences, 12(16), 8295. https://doi.org/10.3390/app12168295