Abstract
Path-keeping requires unmanned surface vehicles (USVs) to follow a planned path in autonomous navigation. It is essential for USVs to carry out autonomous tasks such as collecting various data of water quality and surrounding terrain for exploration and protection of water environments. However, due to obstacle avoidance and other factors such as wind, water waves, and dynamics of USVs, USVs usually deviate from the original planned path during autonomous navigation. This paper proposes a novel path-keeping algorithm based on the artificial potential field method (PK-APF) for USVs. To minimize the deviation between the actual path and the original planned path, the vertical distance and the virtual foot points of the current position of USVs to the original path (a line connecting the previous navigation point and the next navigation point) are calculated. When the vertical distance is larger than a threshold, we regard the vertical foot point as a virtual goal point to guide the USVs to navigate the original path in real-time to achieve high-precision path-keeping. Obstacle avoidance is simulated in the MATLAB and Virtual RobotX (VRX) simulators, and the influence of wind and water waves is considered in VRX. Experiments are conducted in typical scenarios and results show that PK-APF outperforms the traditional APF by at least 22%. The work provides an important basis for real-life environments. Substantial further work is planned for applying the method on a physical USV.
1. Introduction
In the past few decades, USVs have undergone rapid development, especially in environmental monitoring and robotics research. Humans have come to rely on USVs to explore complex ocean spaces [1] and perform some particular tasks, such as river depth exploration through grid routes and 3D modeling of riverbeds [2,3,4]. Therefore, USVs are required to achieve high-precision path-keeping to ensure consistency and uniform sampling of riverbed depth, microbial content data, and water quality data in water [5]. In addition, USVs are essential tools for surface and ocean exploration and research because they can replace human beings to complete repetitive tasks in real-time. With the diversity of tasks, more demands are placed on automatic USVs.
Path planning is difficult in the navigation of USVs, which needs to consider the actual environment and goal tasks [3]. During navigation, the planned path is often affected by external factors such as obstacles, wind, and water waves [6]. Path planning includes global path planning and local path planning. Global path planning is to plan the path by setting the start, intermediate, and goal points in a known environment. A basic algorithm in path planning is Dijkstra [7], which boasts low search efficiency because it searches the whole map. Compared with Dijkstra, A* uses heuristic functions to estimate the path and reduce the search space, which decreases the search time and is suitable for static environments [8,9]. The most important design aspect is the determination of the cost function, which defines the weights of the nodes. It is suitable for searching spaces that are mostly known in advance by vehicles, but is costly in terms of memory and speed for large areas. D* [10,11] is ideal for partially known or continuously changing environments because it is more efficient than A*. Unlike the A* algorithm, D* searches the path nodes by maintaining a priority queue from the goal point until the node reaches the robot’s current position. Therefore, the computational effort is reduced when the robot meets other obstacles. Lifelong planning A* (LPA*) algorithm has introduced incremental environment information, which can significantly improve the search efficiency [12]. However, when the environment changes, A*, D*, and LPA* need to completely replan the full path; therefore, these algorithms are inefficient for path planning in dynamic environments. The D* Lite algorithm is based on LPA* and D* [13], which combines heuristic function and incremental search and only considers the path between the current point and the goal point. Therefore, the D* lite algorithm is more efficient than D* and LPA*, and it is widely used for computer games and virtual simulations [14].
Local path planning uses sensors to help USVs detect obstacles in real-time in an unknown environment and transmit information to the USV’s controller in time to avoid obstacles [15]. As one of the most commonly used local path planning algorithms, Khatib [16] proposed the path planning algorithm of artificial potential field (APF) in 1985. APF has the advantages of simple processing and a high success rate of path planning in an unknown environment. In this algorithm, the whole map is regarded as a potential field, and the robot is regarded as a point in the potential field to avoid obstacles and move towards the goal point. However, APF also has disadvantages, such as falling into local minimum points and low-precision path-keeping. When the goal point attraction and the obstacle’s repulsion are the same, a USV will stay in place and oscillate, unable to reach the goal point. At the same time, when a USV has avoided the current obstacles and there is no influence from other obstacles, it will sail straight to the goal point and cannot return to the original path due to obstacle avoidance and the effects of external factors such as wind and water waves, which cannot guarantee the high-precision path-keeping. In the literature related to APF improvement, Yanyang [17] proposed the path planning and obstacle avoidance of multihug (underwater glider) formation by combining artificial potential field method and Kane method. When falling into the local minimum point, a virtual local coordinate is designated to replace the global goal. When escaping from the minimum point, the global goal is reassigned to guide the forward direction. Pan [18] proposed to combine APF with a virtual structure to ensure effective formation, but the planned path would be complicated and prone to fall into a local minimum point collectively. Hong [19] proposed that APF of local path planning can transform vector force into potential field, and APF with multiple subtargets can help USVs solve local minima and ensure an optimal path. Chen [20] proposed the method of combining ant colony optimization and artificial potential field method to search for the global optimal path in the grid environment, and proposed the method of equipotential tangent circle to define the repulsive function and eliminate the situation where the goal point cannot be reached due to nearby obstacles and local minimum point. Wang [21] proposed to adapt to the unpredictable environment and use the simulated artificial potential field method to carry out hierarchical path planning of USVs. By setting virtual return points on the global path and mixing the global path and local path, the disadvantage of USVs falling into local minimum points can be solved.
Currently, there have been relatively perfect solutions to lane-keeping for automotive cars. In the literature related to car lane-keeping algorithms, Mohamed [22] proposed the use of edge detection and aerial view to assist autonomous vehicles in lane recognition and keeping but only evaluated a closed-loop frame PID control system. Kuo [23] proposed using image sensors so that cars without lidar can accurately detect lanes and stay moving. However, in a complex road environment, the effectiveness of lane-keeping is weakened. Nose [24] proposed to use CNN for lane-keeping in automatic driving. The parameters of CNN set before the test can be learned in real-time during driving to reduce the influence of data deviation. However, USVs often deviate from their original path during the navigation process due to winds, water waves, and obstacle avoidance.
Traditional APF often has the following shortcomings in the navigation of USVs:
- Traditional APF influences the navigation of USVs through attractive and repulsive forces whereas USVs stop when the attractive and repulsive forces are equal in magnitude and opposite in direction, and the resultant force on USVs is zero—that is, when it falls into a local minimum point;
- Traditional APF only focuses on USVs heading to the goal point and ignores the influences of obstacles and wind on the original planned path, thus, it fails to achieve high-precision path-keeping.
Addressing the disadvantages of the traditional APF algorithm, the following improvements are made:
- The idea of temporal force is proposed for USVs to escape from local minimum point and continue the navigation;
- The idea of virtual foot points is proposed to reduce the path deviation between the actual path and the planned path caused by the negative influence of obstacle avoidance, wind, and water waves in the process of autonomous navigation.
2. PK-APF Methodology
2.1. PK-APF Formulation
PK-APF is obtained with improved APF, by modifying the potential field of the force to achieve high-precision path-keeping, and the resultant force of USVs in the force field is written as
where is the resultant force, is the attractive force of the goal point, is another attractive force provided by the virtual foot points, and represents repulsive force from the ith obstacle.
The attractive force provided by the goal point is denoted as
where is a constant scaling coefficient, is the current position of the USV, is the desired goal point location, and is a threshold for piecewise attractive force.
The repulsive force from the ith obstacle is written as
where is the coefficient for repulsive force and indicates the influence range of repulsive force that arises from obstacles. If the USV is within the range of repulsion of multiple obstacles at the same time, is the distance from the position of the ith obstacles to the USV. Therefore, the repulsive force expression of obstacles can represent the repulsive force generated by multiple obstacles or a single obstacle.
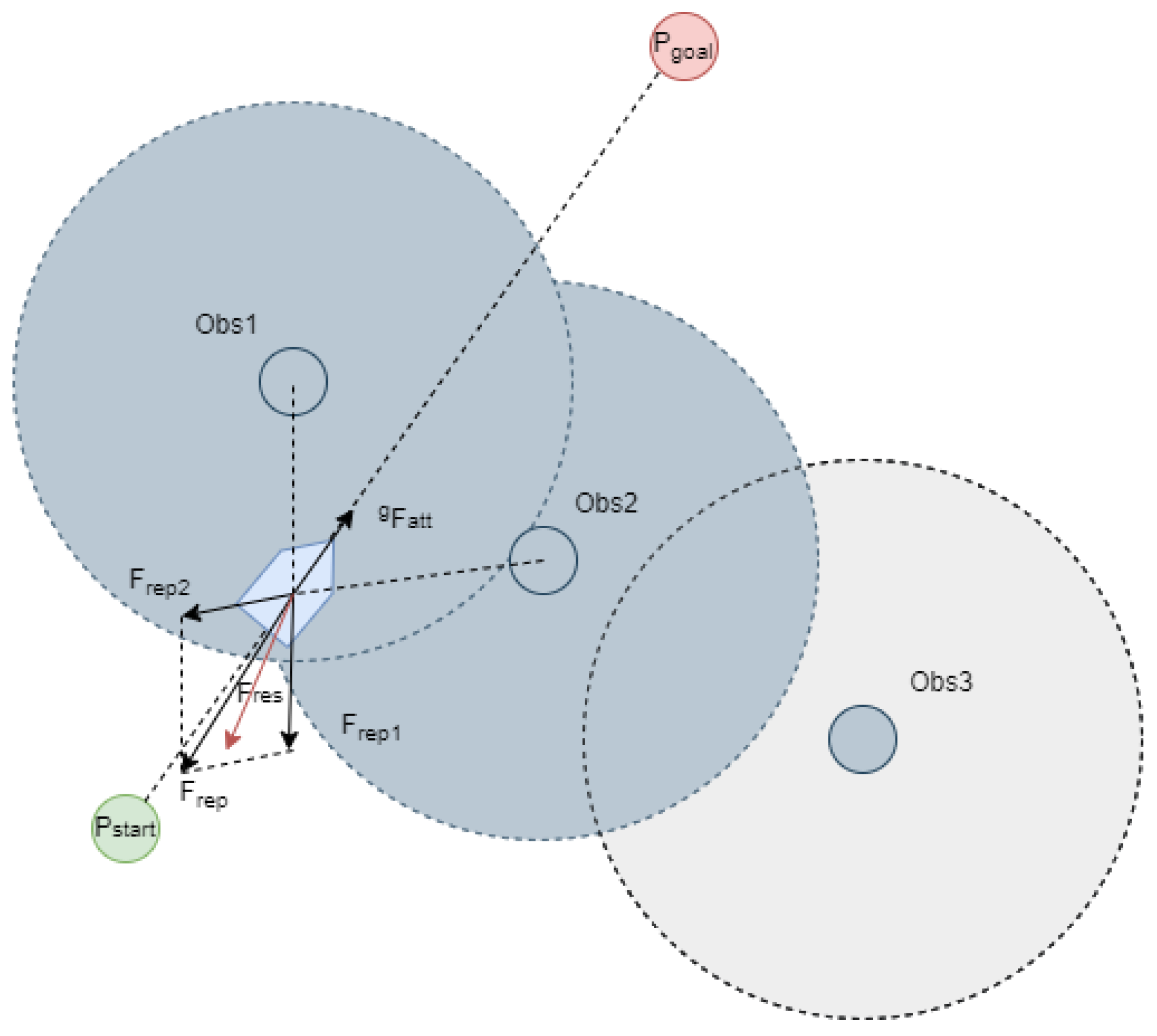
Figure 1 demonstrates that multiple obstacles provide repulsive force on the USV. The dark circular area indicates the repulsive force range of obstacles when the USV is close to an obstacle, and the light color indicates that it is not affected by the obstacle. During the voyage, the USV entered the repulsive force influence range of Obs1 and Obs2; so, the repulsive force is the resultant force provided by and . Meanwhile, no repulsive force is provided by Obs3 for USVs because USVs do not fall into the Obs3 repulsive force influence range.
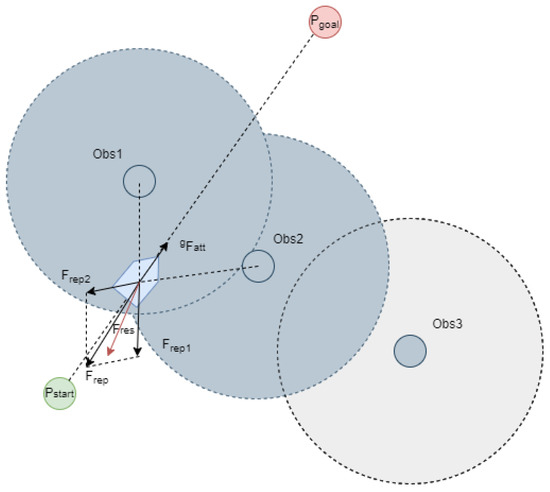
Figure 1.
Multiple obstacles provide repulsive force.
2.2. Virtual Attractive Force
In the practical environment, USVs will deviate from the planned path due to external disturbances, such as obstacle avoidance and the influence of wind and water waves. Virtual foot points provide attractive force calculated with the vertical distance between the current position of the USV and the original planned path (a line connecting the previous navigation point and the next navigation point). The size of the vertical segment determines the attractive force of the virtual foot point. The USV can realize high-precision path-keeping by the attractive force of virtual foot points, when it deviates from the original path.
Virtual foot points provide attractive force, denoted as
where is the current position of the USV, is the desired goal point location, is the desired start point location, is the distance from the position of the obstacles to the USV, and indicates the influence range of repulsive force that arises from obstacles. A and B are the coefficients of the line from the start point to the goal point.
The difference between and ensures that the USV does not collide with obstacles when the virtual foot point provides attractive force to help it return to its original path. means that the USV is outside the repulsive force influence range of the obstacle, with a significant coefficient to help quickly return to the original path. represents when the USV sails within the repulsive force influence range of obstacles. In order to ensure that the USV does not collide with obstacles and maximize its approach to the original path, a smaller proportional coefficient is used.
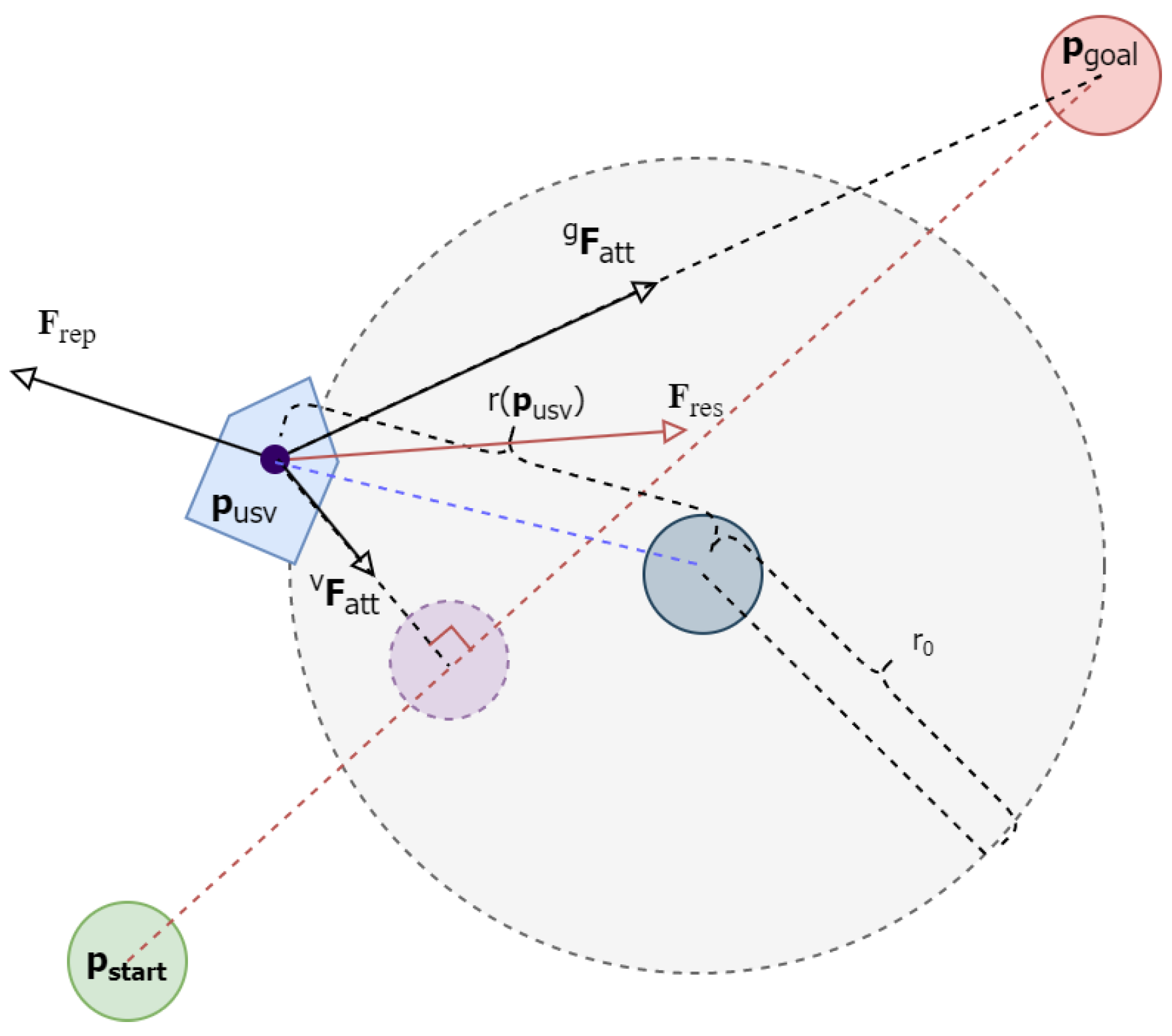
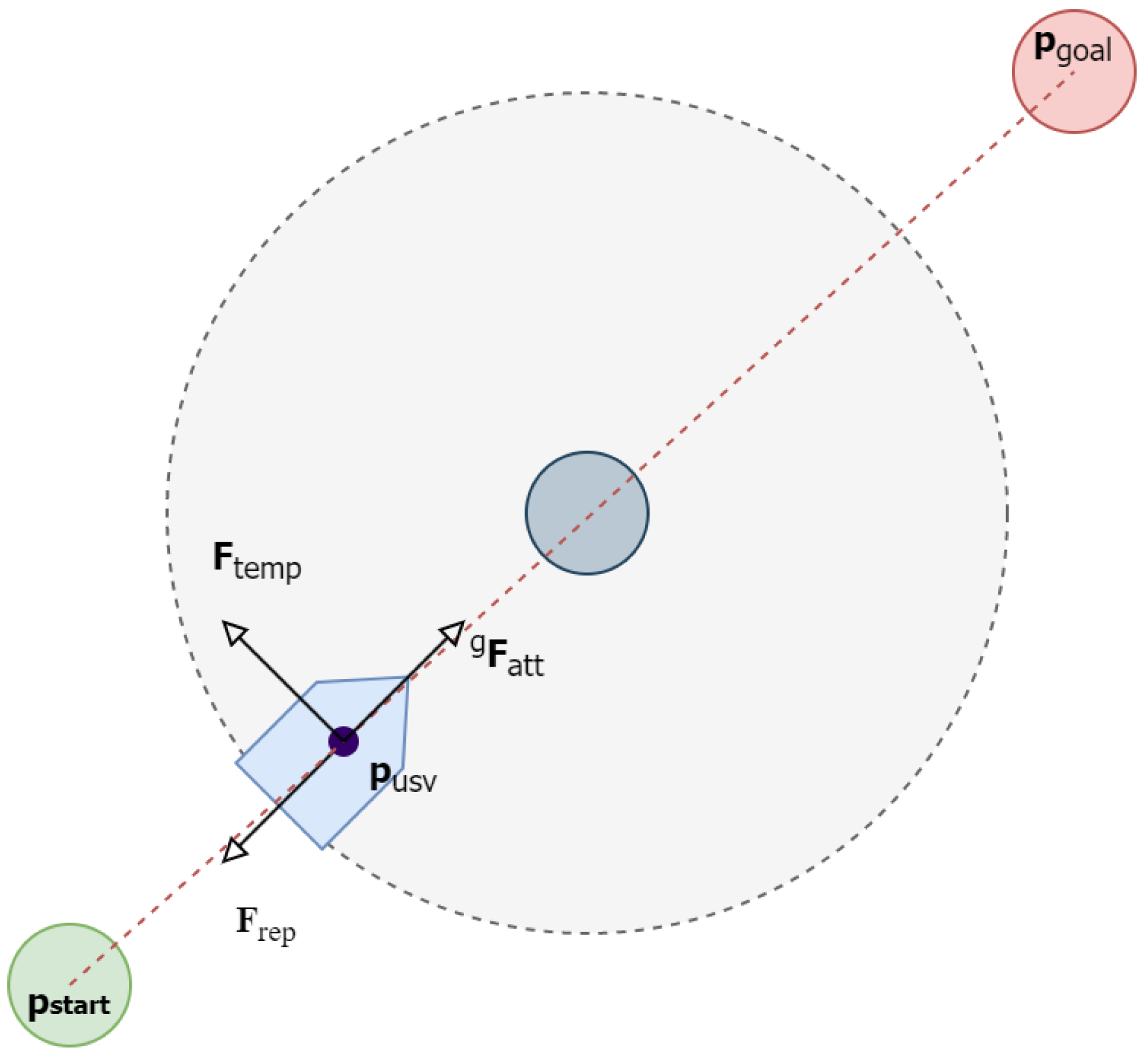
Figure 2 shows the direction of the resultant force. The resultant force is the summation of attractive force for goal point, second attractive force for virtual foot points, and repulsive force for obstacle shown in Equation (1). The USV deviated from the original planned path (start point pointing to the goal point) after reaching the repulsive force influence range. The attractive force of the goal point guides the USV towards the goal point, and the virtual attractive force of the virtual foot points helps the USV approach the original path to achieve high-precision path-keeping.
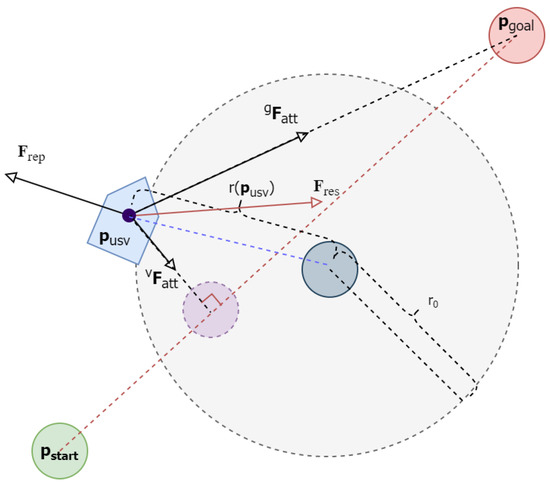
Figure 2.
Virtual foot point guidance.
2.3. Temporal Force
As shown in Figure 3, the USV tends to fall into the local minimum point near the obstacle due to the same magnitude and opposite direction of attractive force and repulsive force. To solve this issue, the temporal force is introduced to help it escape from the local minimum point and move towards the goal point. During the experiment, the USV can break the balance of forces by turning the direction of the temporal force 90 degrees counter-clockwise, as shown in Equation (6).
where is a scaling factor and is rotation matrix in . Normally, we rotate 90 degrees clockwise.
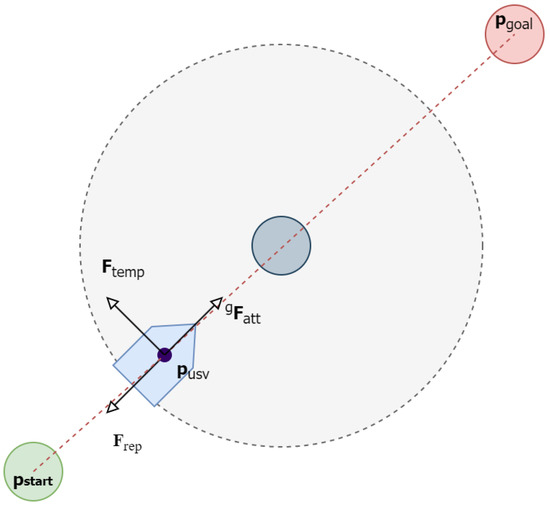
Figure 3.
Temporal force to avoid local minimum point.
3. Experiments
This section discusses the simulation experiments and results with the two algorithms of PK-APF and APF in MATLAB and VRX simulators. The main comparison indexes are whether the goal point can be reached and the path-keeping performance of these two algorithms between the actual and original planned paths. For high-fidelity simulations, the proposed algorithm and simulation are running in real-time.
3.1. MATLAB Implementation
We develop APF and PK-APF path planning algorithms for numerical verification in MATLAB. Figure 4 shows the experimental results; the blue and green points represent the start and goal points of the USV, respectively. Obstacles are shown in red. The gray around the obstacle is the repulsive force influence range of the obstacle; if the USV is not in the repulsive force influence range, there is no repulsive force influence. In the simulation, all sampling points are valid candidates for statistics. Table 1 shows the algorithm’s constant values, start point, and goal point in the MATLAB experiment.
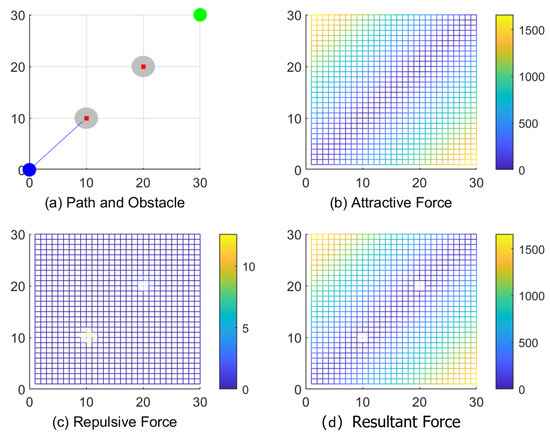
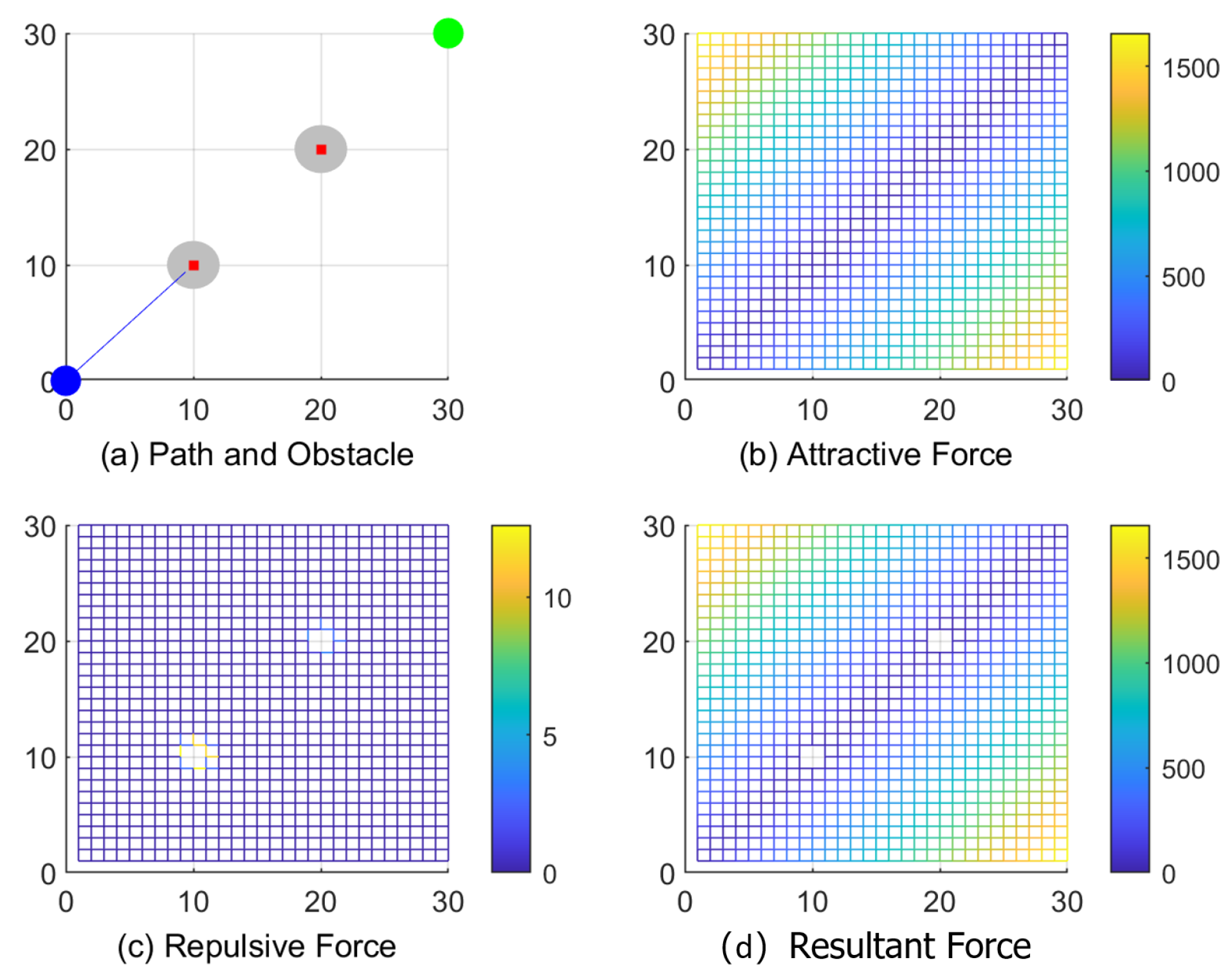
Figure 4.
APF path planning and local minimum point.

Table 1.
MATLAB simulation parameters setting.
3.1.1. Path Planning with Local Minimum Point
When the obstacle is on the line between the start point and the goal point, the traditional APF will fall into the local minimum point because the attractive force of the goal point near the obstacle is equal to the repulsive force of the obstacle but in the opposite direction. As a result, the USV has zero resultant force at the local minimum point and cannot continue to move to the goal point.
Under the action of the attractive force field, the USV begins to sail in the direction of goal point. Figure 4a shows a 30 × 30 m map and obstacles set at (10,10) and (20,20); thus, the USV falls into a local minimum point because the resultant force of the USV is zero when it is close to the first obstacle. Each point in Figure 4b represents the magnitude value of resultant attractive force by the goal point and virtual foot points. The main reason for the larger values of (0,30) and (30,0) are that this position is furthest from the original planned path, and virtual foot points provide attractive forces to help the USV return to the original path. The white area in Figure 4c is the location of obstacles, and the direction of the repulsive force of the obstacle is 360 degrees. The color bar in Figure 4 represents the magnitude of three forces, respectively. The attractive force provided by the goal point, the attractive force provided by the virtual foot points, the repulsive force provided by the obstacle, and the resultant force are calculated by Equations (2), (4), (3), and (1), respectively.
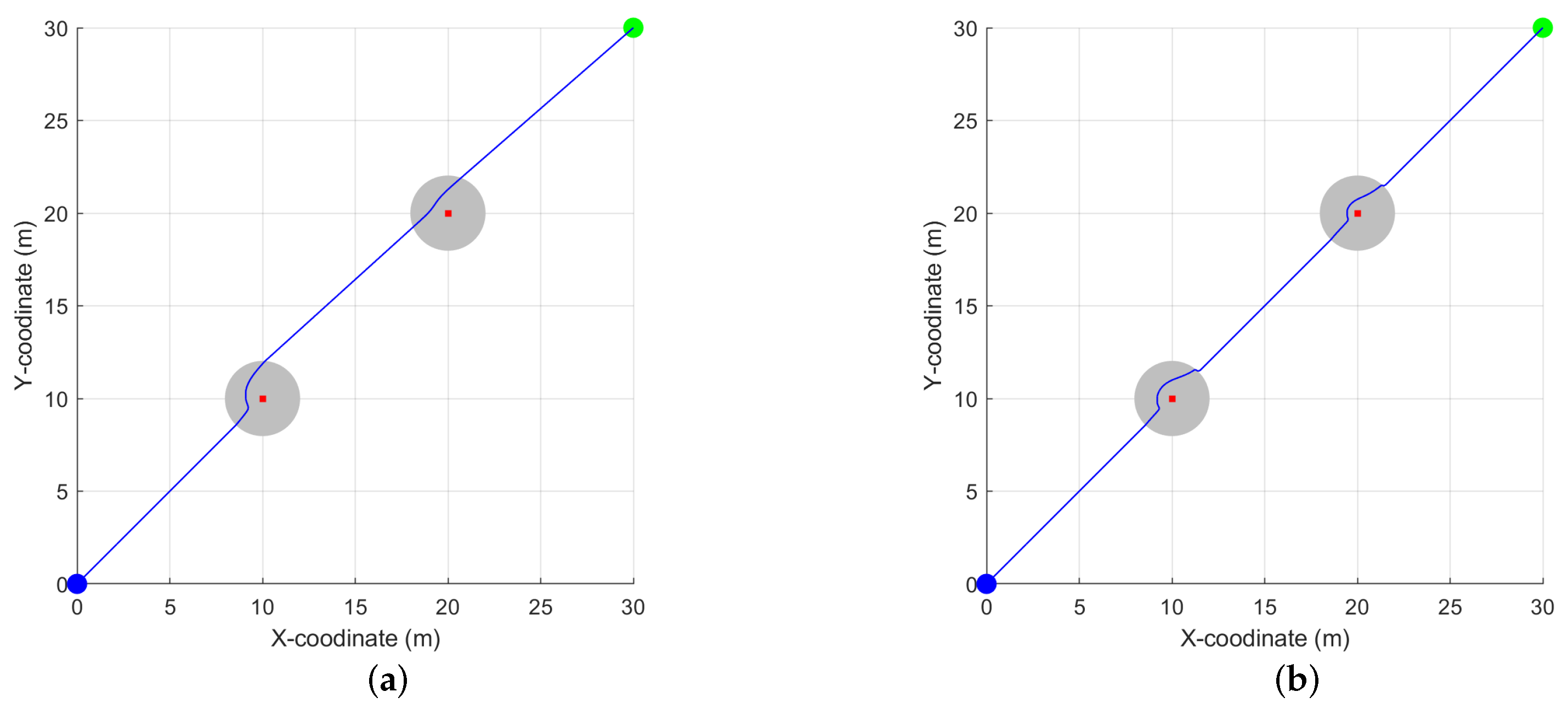
Figure 5 shows the planning path of PK-APF and APF algorithms with temporal force. In Figure 5a, we add temporal force to the USV when it falls into a minimum point; thus, APF can escape from the local minimum point and reach the goal point successfully. However, after being affected with the repulsive force of the obstacle, APF cannot return to the original path to achieve the high-precision path-keeping. In the vicinity of the first obstacle, due to the repulsive force, the USV moves out of the repulsive force influence range and sails in the attractive force direction of the goal point. When approaching the second obstacle, the USV continues to deviate from the original path due to the repulsive force of the second obstacle, as can be seen from time step 2.5 × in Figure 6.
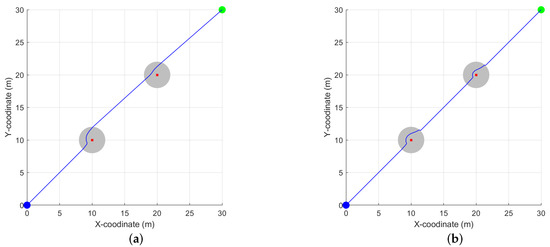
Figure 5.
Path planning with temporal force. (a) APF path planning with temporal force; (b) PK-APF path planning with temporal force.
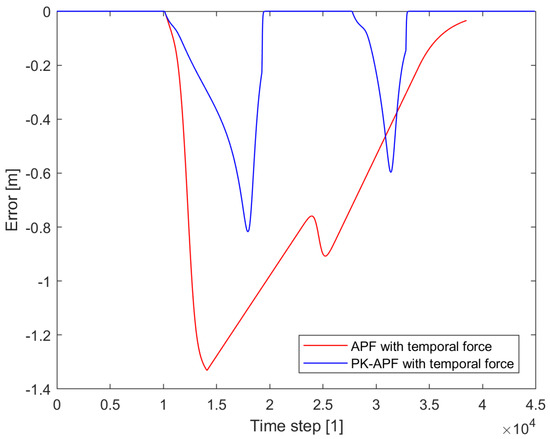
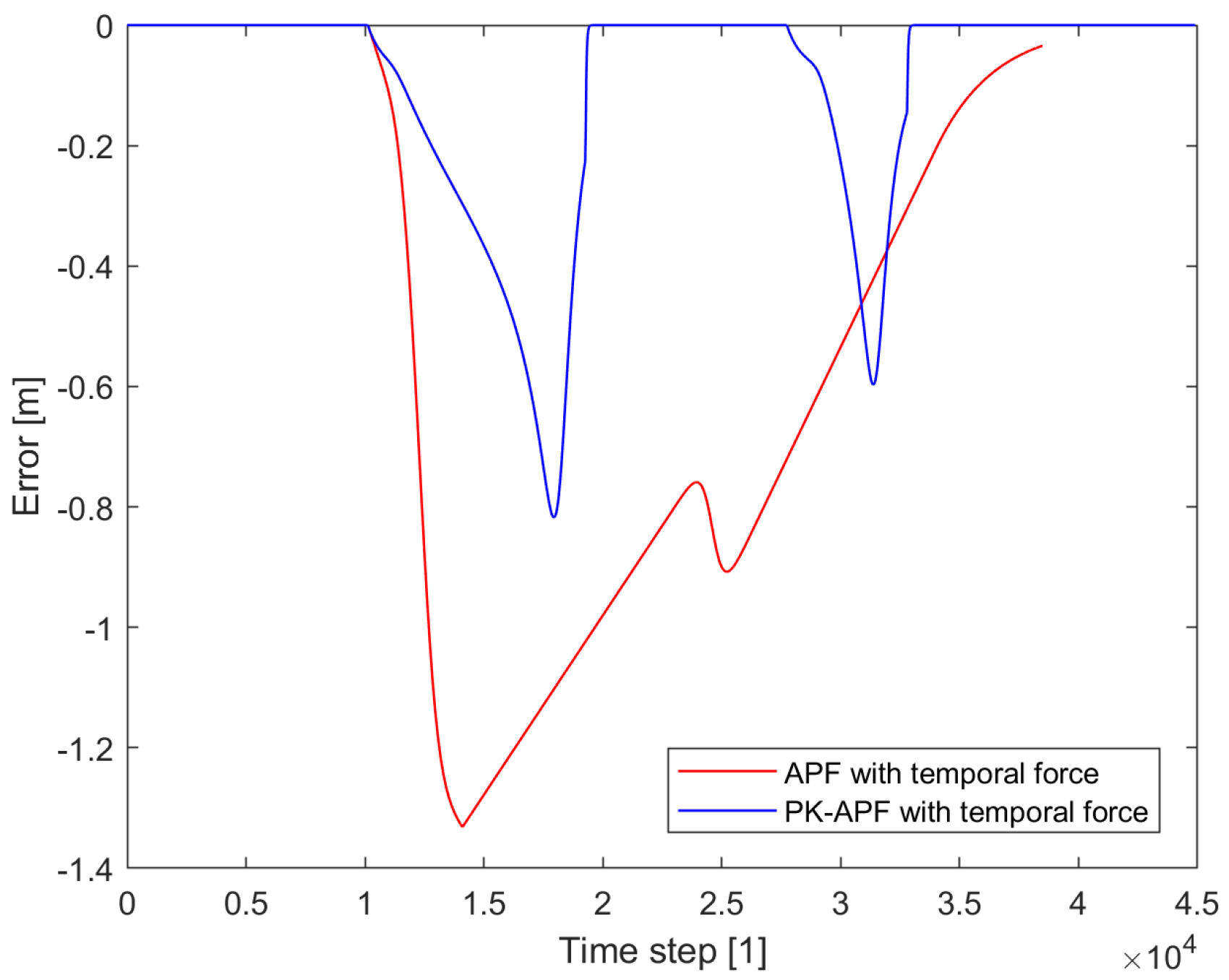
Figure 6.
Path-keeping error result with temporal force.
Figure 5b shows the planned path of PK-APF with temporal force; the USV escapes the balance of forces by temporal forces when it is at the local minimum point. Meanwhile, after escaping from the local minimum point, the USV deviates from the path to avoid obstacles. By setting up virtual goal points, the USV is guided to approach the original path to achieve high-precision path-keeping. As the repulsive force of the obstacle is related to the distance to the goal point, the repulsive force of the second obstacle is reduced because it is close to the goal point. Thus, the deviation distance of the USV is reduced compared with that near the first obstacle. Further, the virtual foot points provide attractive force to guide the USV’s return to the original planned path, and the maximum deviation is reduced compared to APF.
The statistics of path-keeping errors are shown in Figure 6. The maximum deviation of APF is 1.332 m when avoiding obstacles, and it cannot return to the original path in time. The maximum deviation of PK-APF is 0.8177 m, which is 38.61% less than that of APF. Besides, it only deviates from the planned path when avoiding obstacles. After that, it can return to the planned path in time without the influence of obstacles and achieve a higher precision of path-keeping compared to APF. As the PK-APF needs to return to the original path in time after leaving the influence range of the obstacle. The path length of PK-APF is larger than that of APF, and the average step size of PK-APF is the same as that of APF; so, the total time step of PK-APF is larger than that of APF.
3.1.2. Path Planning in Narrow Corridor
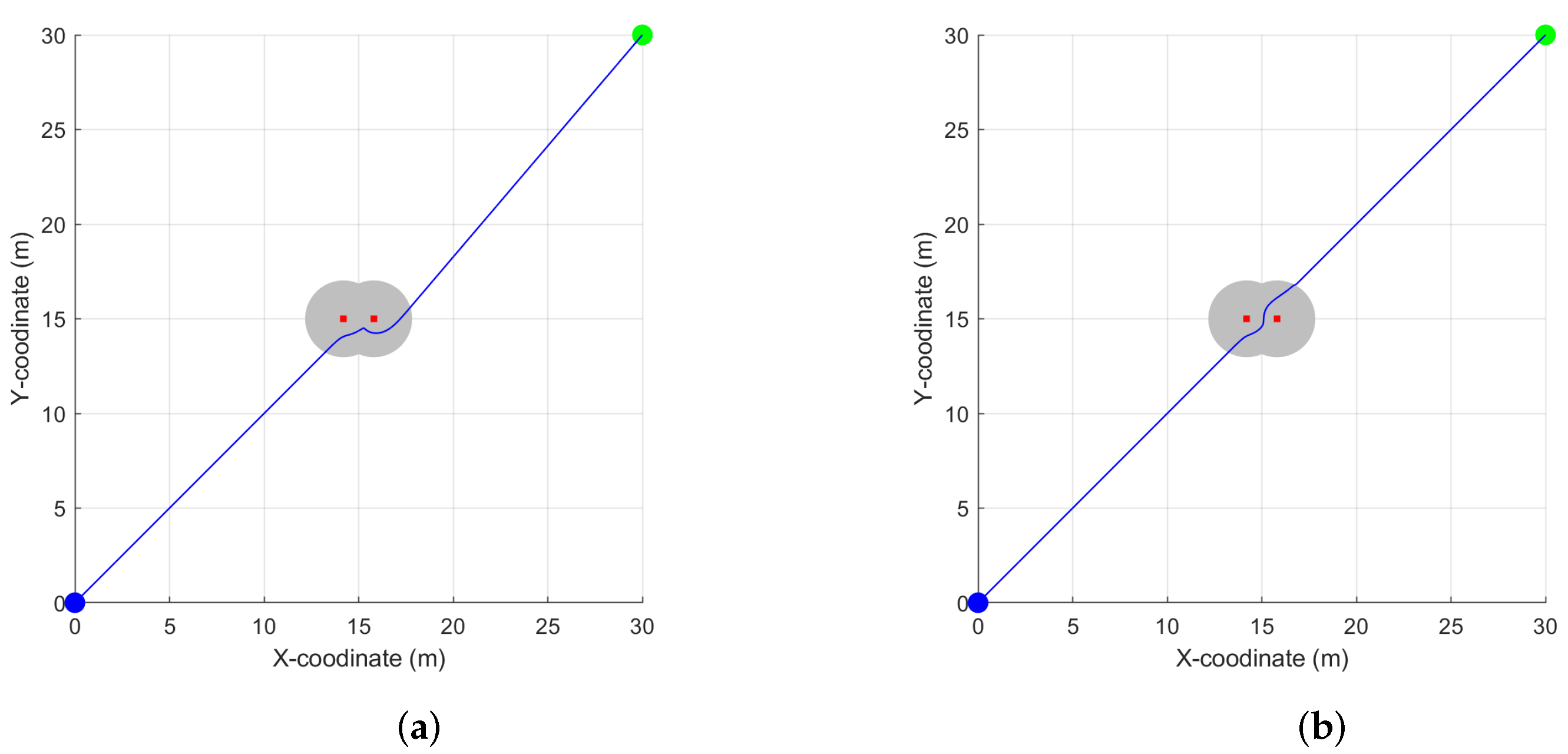
During USV navigation, the narrow corridor between obstacles often affects the behavior of USVs. The positions of the obstacles are set at (14.2,15) and (15.8,15). As multiple obstacles simultaneously affect the repulsive force on the USV, when obstacles are some distance apart but close, a narrow corridor is created for the USV to travel along. Figure 7 presents the APF and PK-APF algorithms’ planning paths in a narrow corridor environment. After repulsing by multiple obstacles, the traditional APF will be far away from the obstacles and continue to move towards the goal point, resulting in a significant deviation between the original planned path and the actual navigation path. However, because PK-APF has the attractive force of virtual foot points and returns the original path immediately, it helps the USV complete high-precision path-keeping in the narrow corridor path composed of obstacles and complete path planning.
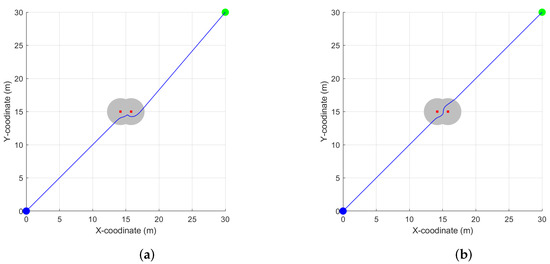
Figure 7.
Path planning in narrow corridor. (a) APF path planning; (b) PK-APF path planning.
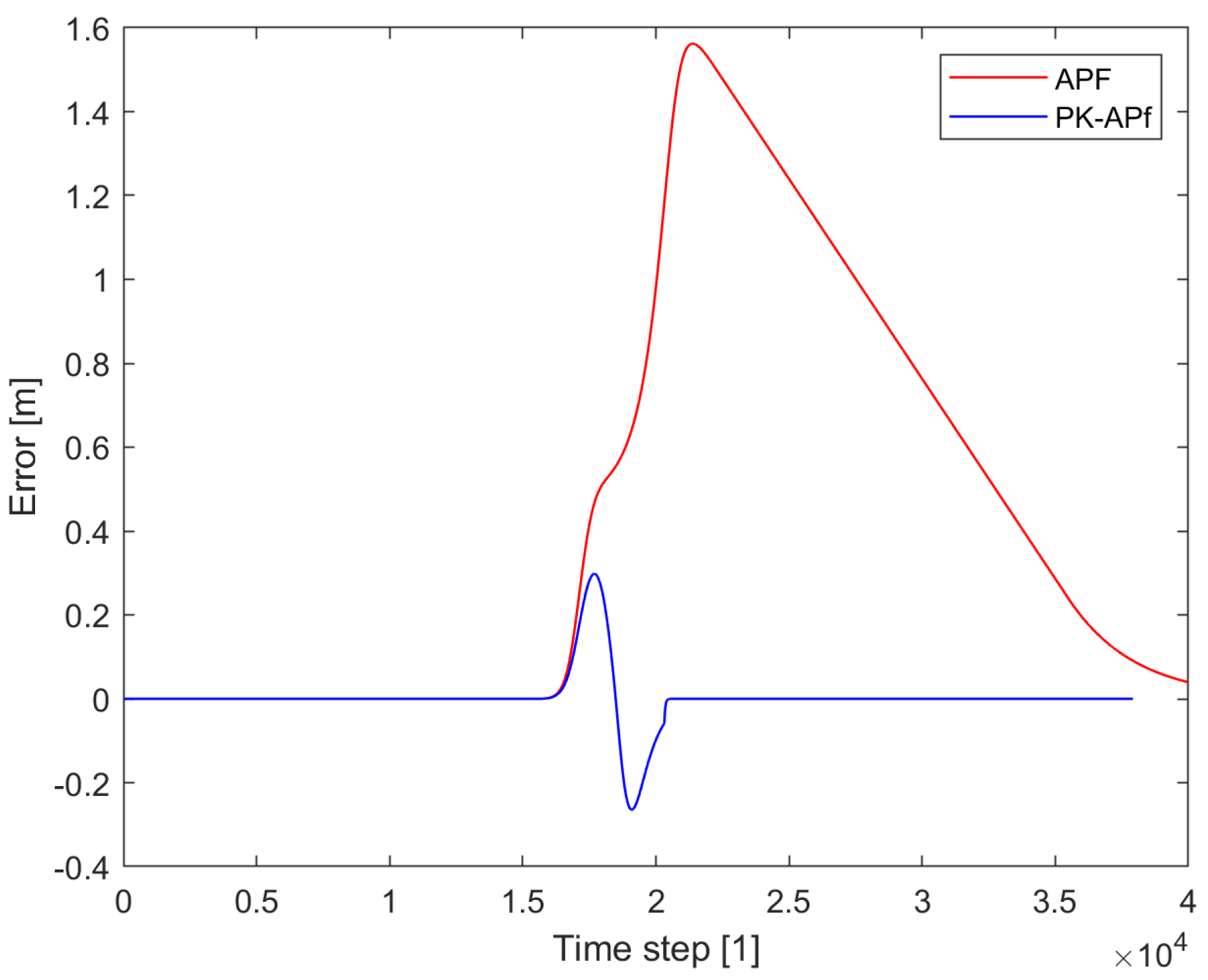
The statistics of path-keeping errors are shown in Figure 8. As PK-APF can pass through the narrow corridor, the maximum deviation error from the original path is 0.1983 m. Meanwhile, it can be seen that it can achieve high-precision overlap with the original planned path except for avoiding obstacles, and the deviation of the original path is 0 m. In the path planned by APF, the maximum deviation error from the original path is 1.562 m. PK-APF reduced the maximum deviation error by 80.92% compared with APF. The planned path of PK-APF is similar to that of APF because PK-APF passes between obstacles. Therefore, the total time step of PK-APF is similar to that of APF.
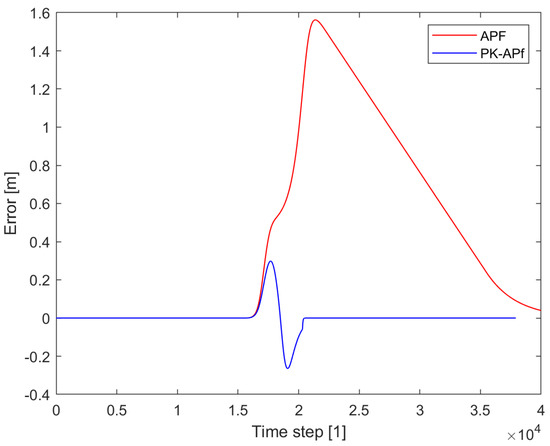
Figure 8.
Path-keeping error result in narrow corridor.
3.1.3. Path Planning with Multiple Obstacles
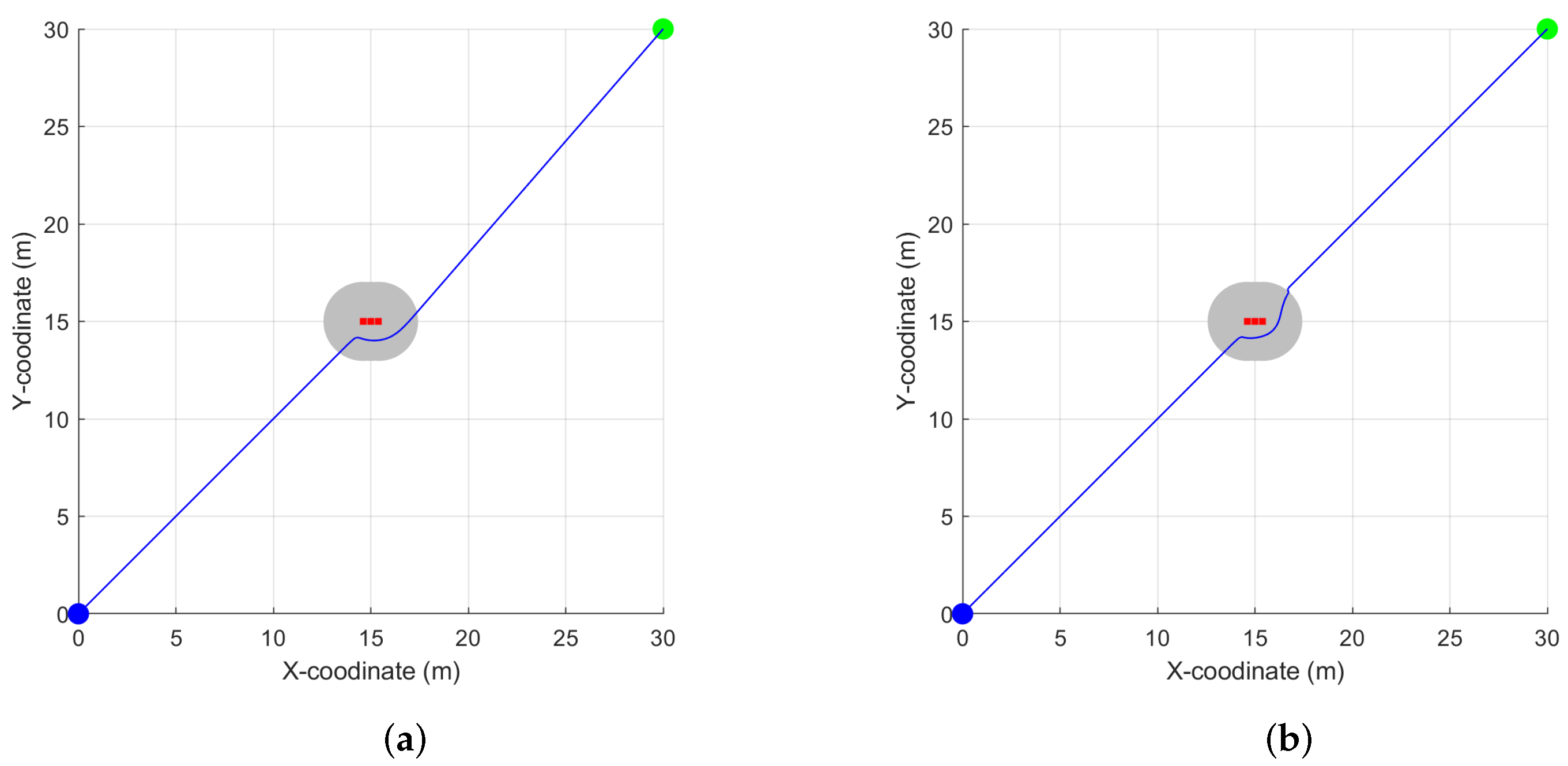
It is a common phenomenon to have multiple obstacles on the planned path during navigation of USVs. The position of the obstacles are set at (14.6,15), (15,15), and (15.4,15). The repulsive force of multiple obstacles on USVs will produce a resultant force. In Figure 9, the APF and PK-APF algorithms can only reach the goal point by bypassing the obstacles when they encounter multiple obstacles. While avoiding obstacles, APF deviates significantly from PK-APF because there are no virtual foot points to guide the USV back to the original path.
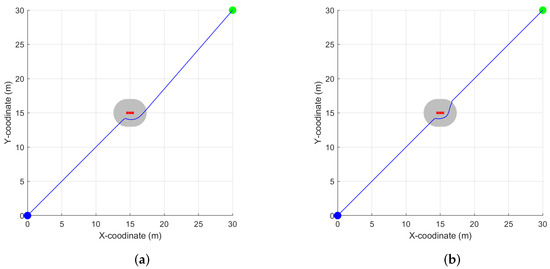
Figure 9.
Path planning with multiple obstacles. (a) APF path planning; (b) PK-APF path planning.
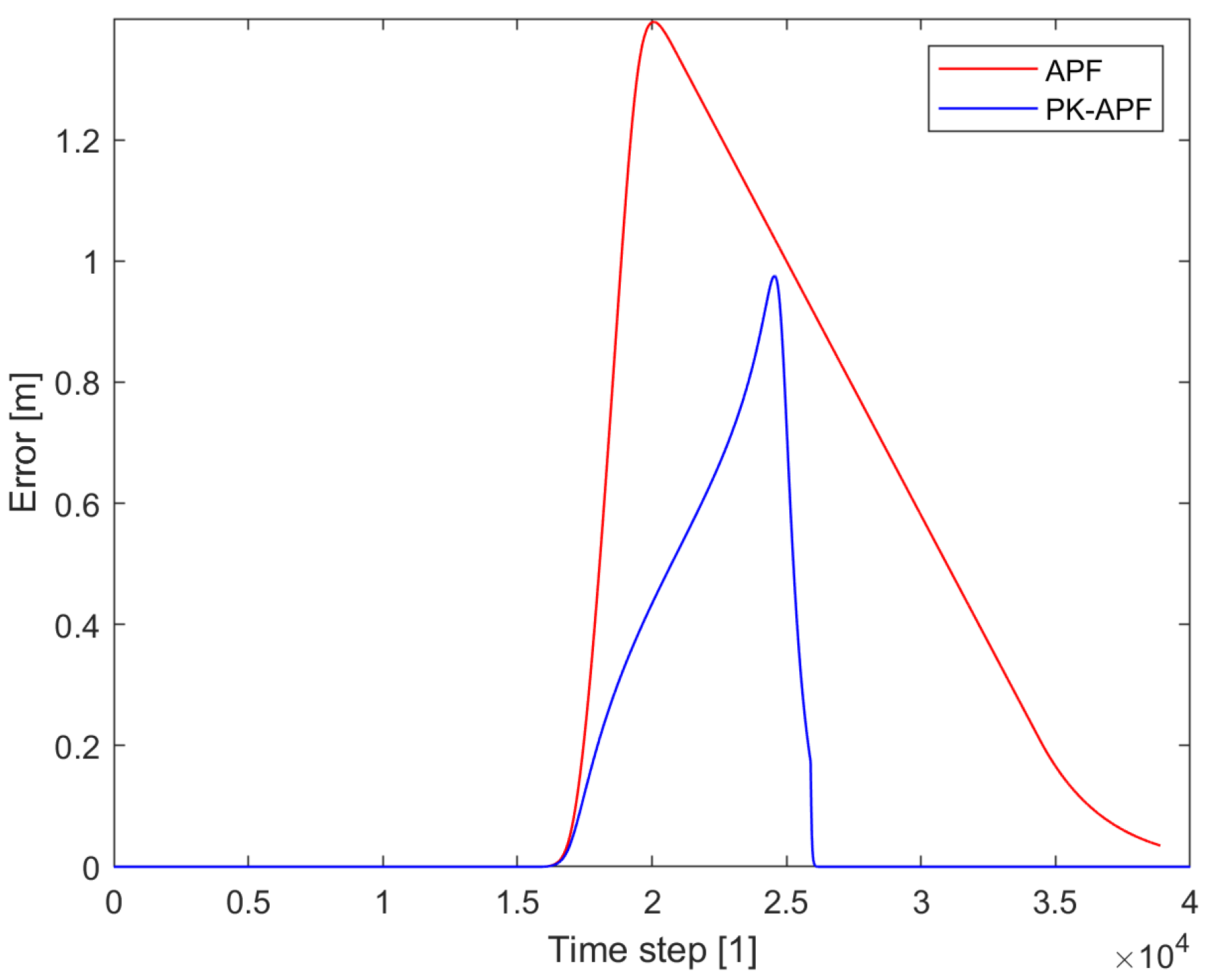
The statistics of path-keeping errors are shown in Figure 10. The maximum deviation degree of PK-APF is 0.9755 m, and APF is 1.395 m. Compared with APF, PK-APF can reduce the deviation degree by 30.07%. Meanwhile, PK-APF can timely return to the original planned path after bypassing obstacles, realizing high-precision path-keeping.
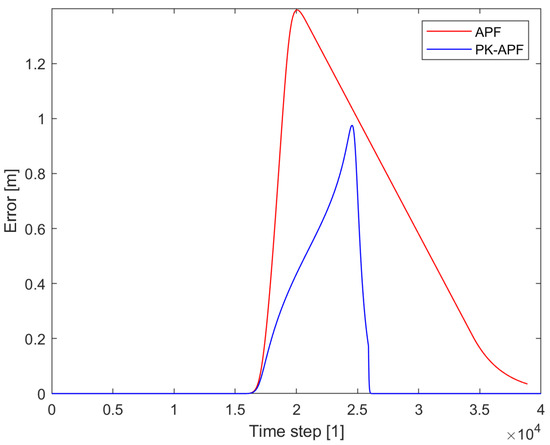
Figure 10.
Path-keeping error result in multiple obstacles.
3.1.4. Conclusion of MATLAB Simulation
The above three experiments show that APF will fall into the local minimum point and fail to reach the goal point in MATLAB environment simulation. Even without falling into the local minimum point, there is a great deviation between the actual path and the original planned path because of obstacle avoidance. PK-APF simulations show that the goal points can be reached and high-precision path-keeping is achieved. Regarding data analysis, the maximum deviation path-keeping error of PK-APF was reduced by 30.07% to 80.92% compared with APF. When obstacles interfere with the USV navigation path planning, PK-APF can avoid obstacles, reach the goal point, and achieve high-precision path-keeping.
Table 2 shows the path sampling points, 0.5-error points, and path-keeping precision information of APF and PK-APF. The total sampling point is the travel length of the USV when planning the path. A point with a 0.5-error is considered sailing on the original planned path less than 0.5 m-deviation. Path-keeping precision for the USV is calculated with the precision of sampling points where the error is below 0.5 m. In the first experiment, because the APF falls into the local minimum point, the path planned to the goal point was not completed, so it did not calculate the path-keeping precision. In the Table 2 experiments, the path-keeping performance of PK-APF is higher than APF, which indicates that PK-APF has a higher path-keeping performance than APF.
Table 2.
Path-keeping error.
3.2. High-Fidelity ROS Simulation
Besides the effect of obstacles on path-keeping, there are other disturbances such as water waves and wind that can affect the precision of path-keeping. In this section, we use Virtual RobotX to simulate the effect of wind on the USV in APF and PK-APF algorithms.
3.2.1. Virtual RobotX
Virtual RobotX (VRX) provides a high-fidelity simulation for USVs in complex marine environments, based on Gazebo simulation and Robot Operating System (ROS) [25]. VRX extends the Gazebo simulator, including environmental models, USV dynamics, onboard sensors, and some ocean object models to support a wide range of simulation scenarios. The following capabilities featured in the VRX strongly support us for high-fidelity simulation:
- Comprehensive wave model to disturb USVs’ motion;
- Stochastic wind representation to disturb USVs’ motion;
- Six degree-of-freedom model for USVs with configurable actuators.
Hence, VRX is a tool to validate our algorithm before undertaking physical on-site experiments. Researchers can customize the USV platform and the dynamic ocean environment using VRX to support their development.
3.2.2. Simulation Parameters and Methods
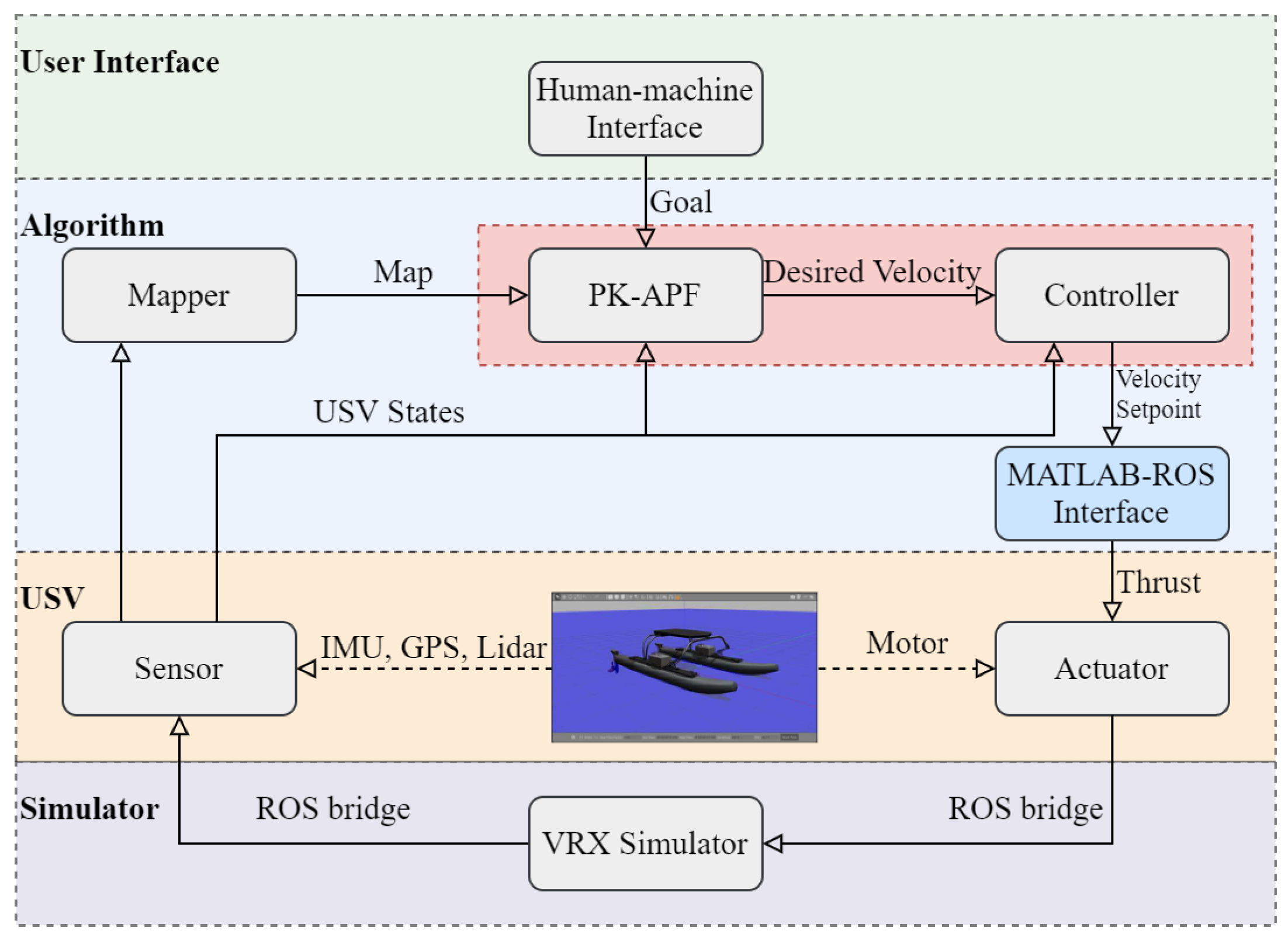
We configure the USV with two articulated aft thrusters mounted at the back-end of the USV. The constant mean wind velocity is set to 0 m/s and 5.9 m/s, respectively. The standard deviation is set to 1.5 m/s. We use the PK-APF algorithm in MATLAB to calculate the desired velocity and heading for the USV. Then, we publish the profile through the MATLAB-ROS interface. Finally, we convert Twist ROS messages to thruster commands to move the USV. The simulation framework is shown in Figure 11.
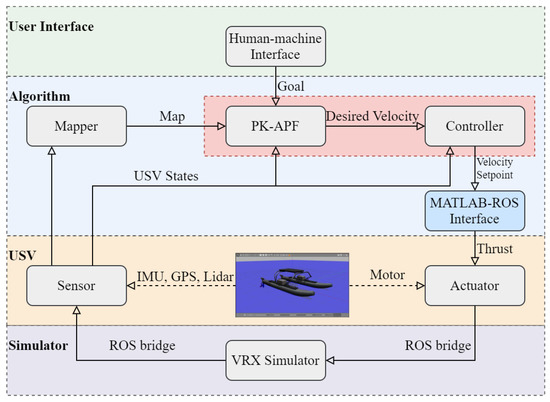
Figure 11.
Simulation framework.
In the simulation, we mainly focus on the wind impacts on the USV. We obtain the states of the USV from Gazebo ground truth to reduce the effects of state estimation. Table 3 summarizes the parameters of the simulation environment and algorithms. Additionally, the parameters for the USV dynamics in Gazebo use default values presented in VRX.
Table 3.
Simulation parameters setting.
3.2.3. Simulation Result and Discussion
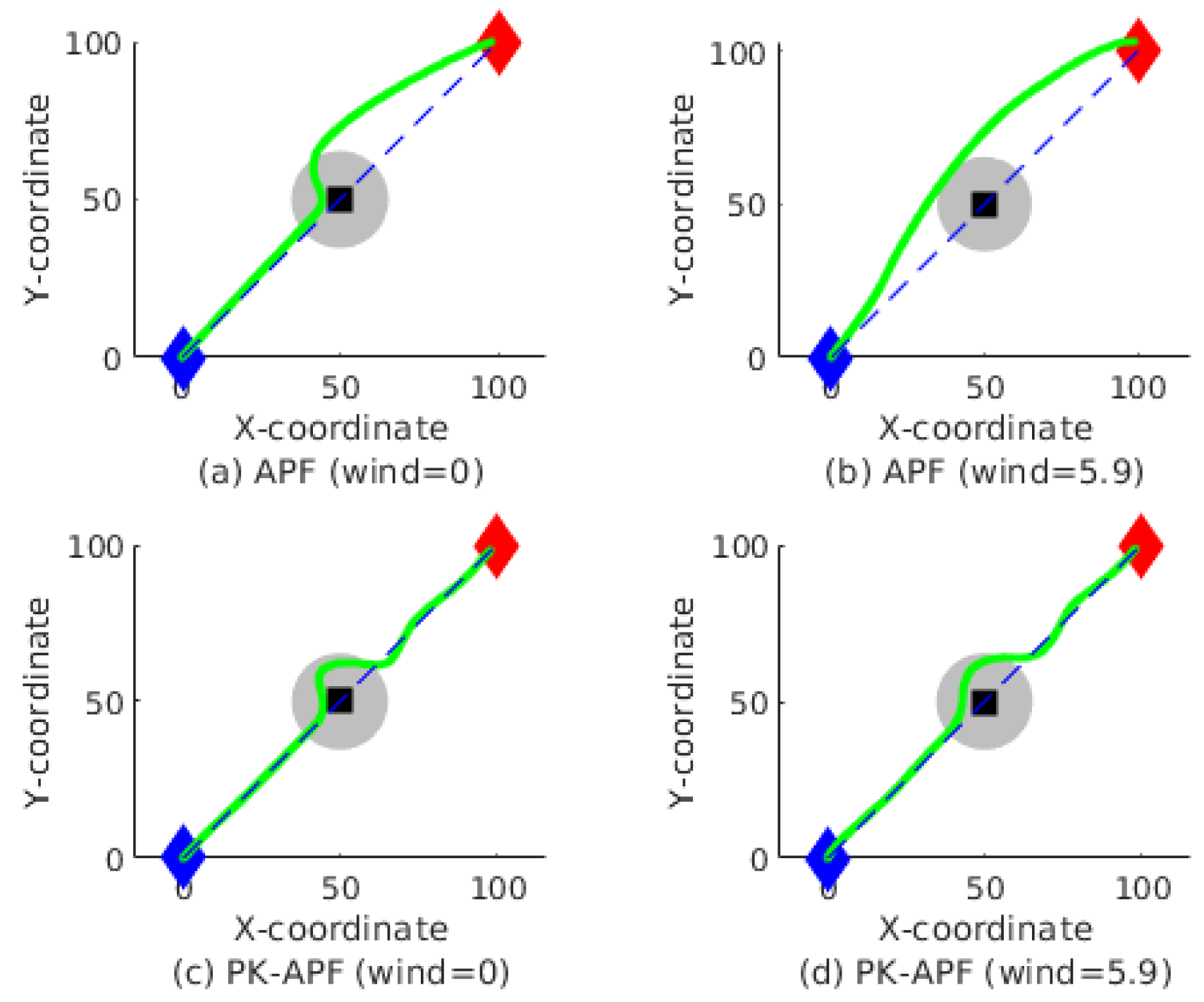
The PK-APF and APF are validated using high-fidelity simulations with water wave, wind, and USV dynamics. We compare the traditional APF and PK-APF for different wind speed scenarios at the approximate 100 × 100 m area. The paths of the simulated results are shown in Figure 12.
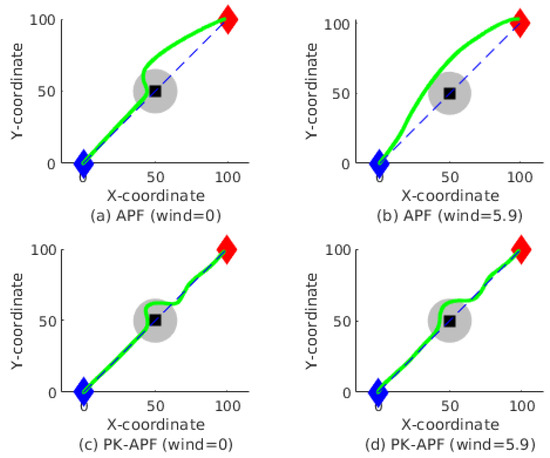
Figure 12.
Planned and original paths for APF and PK-APF with different wind disturbances.
The experiments show that the planner successfully navigates the USV from the start point to the goal point using APF and PK-APF at different wind speeds. Without the wind disturbance, Figure 12a,c show that both algorithms can avoid the obstacle. The APF in Figure 12a moves to the goal point directly while PK-APF in Figure 12c moves to the original path first, then toward the goal point. This is the reason why the total distance of APF is less than that of PK-APF. The PK-APF can guide the USV to return to the original path after avoidance. For Figure 12b,d, the result demonstrates that PK-APF is robust to keep the path with wind disturbance, while APF deviates from the original planned path. The USV does not fall into local minimum point due to wind, water waves, and the USV’s inertia and temporal force. However, we observe that the path overshoots a few meters due to inertia. For Figure 12c,d, the result shows that PK-APF can achieve path-keeping and obstacle avoidance with wind disturbances.
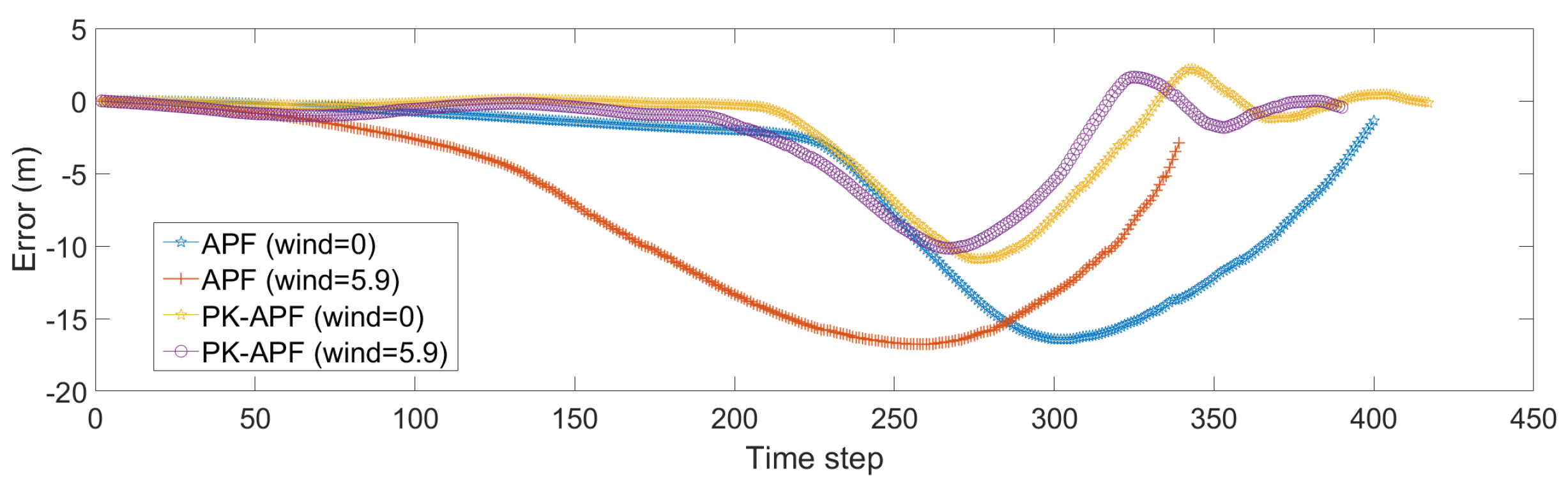
We plotted the error between the USV position and desired straight-line path. PK-APF achieved better path-keeping compared with traditional APF. Figure 13 indicates the path-keeping error of four experiments. At the time step between 100 and 200, PK-APF tracks desired path within 0.5-m error while APF tracks straight path with about 10-m error. Particularly, APF in the windy environment has a significant deviation due to wind disturbances. At the time step between 200 and 325, the USV detected the obstacle. Both PK-APF and APF successfully guide the USV to avoid obstacles. After avoiding maneuver, the PK-APF enables path-keeping quickly. When the USV exits the repulsive force influence range, the path of PK-APF slightly overshoots approximately 2 m to keep the desired path.
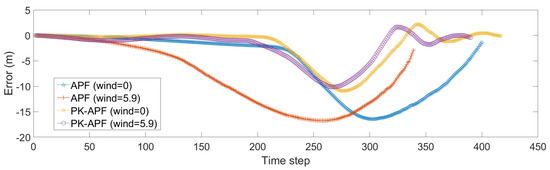
Figure 13.
Path-keeping error for APF and PK-APF with different wind speeds.
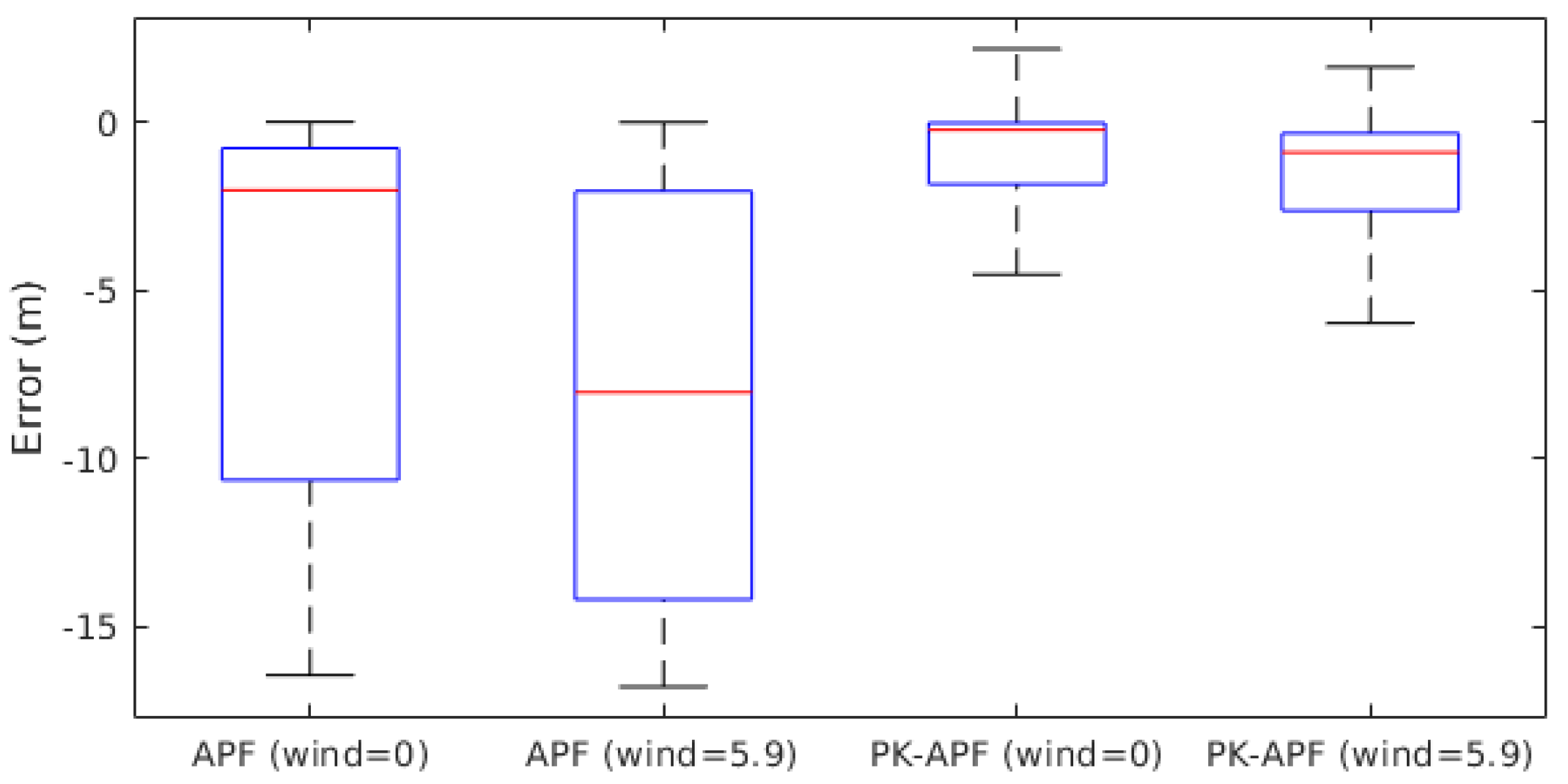
Figure 14 shows the statistics of path-keeping errors. The medians of path-keeping error are from 2.0 to 8.0 m for APF at wind speeds of 0 and 5.9 m/s, and from 0.2 to 0.9 m for PK-APF at wind speeds of 0 and 5.9 m/s, respectively. The maximum relative path-keeping errors at wind speeds of 0 and 5.9 m/s are from 16.4 to 16.8 m for APF, and from 4.5 to 5.9 m for PK-APF, respectively. PK-APF reduces 64.9% maximum relative path-keeping error compared with APF without wind, and 72.6% under wind disturbance.
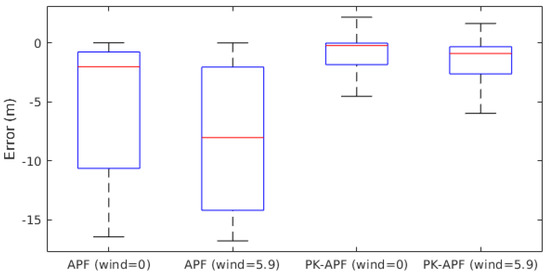
Figure 14.
Path-keeping error statistics.
In short, the proposed PK-APF algorithm demonstrates a robust path-keeping ability and obstacle avoidance function even under external disturbances such as obstacle avoidance, wind, and water wave, which enables wide applications for USVs such as riverbed modeling tasks and meshed voyages for water sampling.
4. Conclusions and Future Work
In this paper, the PK-APF algorithm is proposed to solve the shortcomings of USVs in their failure to achieve a high-precision path and falling into the local minimum point by increasing virtual foot points and temporal forces, respectively. In the simulation environment of MATLAB and VRX, obstacles and wind force are added as external disturbance factors to represent a real environment. The experimental results show that the path-keeping precision of PK-APF is improved by at least 22% than APF. Therefore, USVs are of great significance in practical use when high-precision data collection is needed, such as grid data for obtaining water quality data and riverbed modeling.
In the future, we will implement the proposed PK-APF algorithm in a real USV, and an advanced controller will be designed to help the USV achieve the high-precision path-keeping in real environments.
Author Contributions
Conceptualization, Y.C.; methodology, Y.C.; software, Y.C. and Z.W.; validation, Y.C. and Z.W.; writing—original draft preparation, Y.C., Z.W., Y.Y., X.Z., E.G.L. and P.P.; writing—review and editing, Y.C., Z.W., Y.Y., X.Z., E.G.L. and P.P.; funding acquisition, Y.Y. and X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by by the Suzhou Science and Technology Project (SYG202122), the Key Programme Special Fund of Xi’an Jiaotong-Liverpool University (XJTLU) (KSF-A-19, KSF-E-65, KSF-P-02, KSF-E-54), and the Research Development Fund of XJTLU (RDF-19-02-23).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| USVs | Unmanned surface vehicles |
| PK-APF | Path-keeping artificial potential field |
| APF | Artificial potential field |
| VRX | Virtual RobotX |
| ROS | Robot operating system |
| LPA* | Lifelong planning A* |
| CNN | Convolutional Neural Network |
| MATLAB | Matrix Laboratory |
| PID | Proportion–Integration–Differentiation |
| A* | A Star |
| D* | D Star |
References
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar]
- Mahacek, P.; Berk, T.; Casanova, A.; Kitts, C.; Kirkwood, W.; Wheat, G. Development and initial testing of a swath boat for shallow-water bathymetry. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.R.; Mohammadi-Aghdam, A.; Kiapei, A.; Salmani-Zakaria, Y.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an Unmanned Surface Vehicle (USV) by algorithms fusion. Ocean Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Kim, T.; Kim, J. Precision navigation and mapping under bridges with an unmanned surface vehicle. Auton. Robots 2015, 38, 349–362. [Google Scholar] [CrossRef]
- Zhu, X.; Yue, Y.; Wong, P.W.; Zhang, Y.; Ding, H. Designing an optimized water quality monitoring network with reserved monitoring locations. Water 2019, 11, 713. [Google Scholar] [CrossRef]
- Xiao, C.; Zhong, L.; Jianqiang, Z.; Dechao, Z.; Jiao, D. Adaptive sliding-mode path following control system of the underactuated USV under the influence of ocean currents. J. Syst. Eng. Electron. 2018, 29, 1271–1283. [Google Scholar] [CrossRef]
- Shu-Xi, W. The improved dijkstra’s shortest path algorithm and its application. Procedia Eng. 2012, 29, 1186–1190. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path planning with modified a star algorithm for a mobile robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef]
- Ammar, A.; Bennaceur, H.; Châari, I.; Koubâa, A.; Alajlan, M. Relaxed Dijkstra and A* with linear complexity for robot path planning problems in large-scale grid environments. Soft Comput. 2016, 20, 4149–4171. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially-known environments. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; Volume 4, pp. 3310–3317. [Google Scholar] [CrossRef]
- Zhu, X.; Yue, Y.; Ding, H.; Wu, S.; Li, M.; Hu, Y. An Improved APFM for Autonomous Navigation and Obstacle Avoidance of USVs. In Proceedings of the ICINCO (2), Prague, Czech Republic, 29–31 July 2019; pp. 401–408. [Google Scholar]
- Koenig, S.; Likhachev, M.; Furcy, D. Lifelong planning A*. Artif. Intell. 2004, 155, 93–146. [Google Scholar] [CrossRef]
- Koenig, S.; Likhachev, M. D^* lite. AAAI/IAAI 2002, 15, 476–483. [Google Scholar]
- Oral, T.; Polat, F. A multi-objective incremental path planning algorithm for mobile agents. In Proceedings of the 2012 IEEE/WIC/ACM International Conferences on Web Intelligence and Intelligent Agent Technology, Washington, DC, USA, 4–7 December 2012; Volume 2, pp. 401–408. [Google Scholar]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local path planning for unmanned surface vehicle collision avoidance based on modified quantum particle swarm optimization. Complexity 2020, 2020, 3095426. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar]
- Yang, Y.; Wang, S.; Wu, Z.; Wang, Y. Motion planning for multi-HUG formation in an environment with obstacles. Ocean Eng. 2011, 38, 2262–2269. [Google Scholar] [CrossRef]
- Pan, W.W.; Jiang, D.P.; Pang, Y.J.; Li, Y.M.; Zhang, Q. A multi-AUV formation algorithm combining artificial potential field and virtual structure. Acta Armamentarii 2017, 38, 326. [Google Scholar]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Chen, Y.; Bai, G.; Zhan, Y.; Hu, X.; Liu, J. Path planning and obstacle avoiding of the USV based on improved ACO-APF hybrid algorithm with adaptive early-warning. IEEE Access 2021, 9, 40728–40742. [Google Scholar] [CrossRef]
- Wang, N.; Xu, H.; Li, C.; Yin, J. Hierarchical path planning of unmanned surface vehicles: A fuzzy artificial potential field approach. Int. J. Fuzzy Syst. 2021, 23, 1797–1808. [Google Scholar] [CrossRef]
- Diab, M.K.; Ammar, H.H.; Shalaby, R.E. Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control. In Proceedings of the 2020 International Conference on Innovation and Intelligence for Informatics, Computing and Technologies (3ICT), Sakheer, Bahrain, 20–21 December 2020; pp. 1–6. [Google Scholar]
- Kuo, C.; Lu, Y.; Yang, S. On the image sensor processing for lane detection and control in vehicle lane keeping systems. Sensors 2019, 19, 1665. [Google Scholar] [CrossRef] [PubMed]
- Nose, Y.; Kojima, A.; Kawabata, H.; Hironaka, T. A study on a lane keeping system using CNN for online learning of steering control from real time images. In Proceedings of the 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Jeju, Korea, 23–26 June 2019; pp. 1–4. [Google Scholar]
- Bingham, B.; Aguero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward Maritime Robotic Simulation in Gazebo. In Proceedings of the MTS/IEEE OCEANS Conference, Seattle, WA, USA, 27–31 October 2019. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).