
Measurement and Analysis of Radar Signals Modulated by the Respiration Movement of Birds

 ,
,
Abstract
:Featured Application
Abstract
1. Introduction
2. Method and Materials
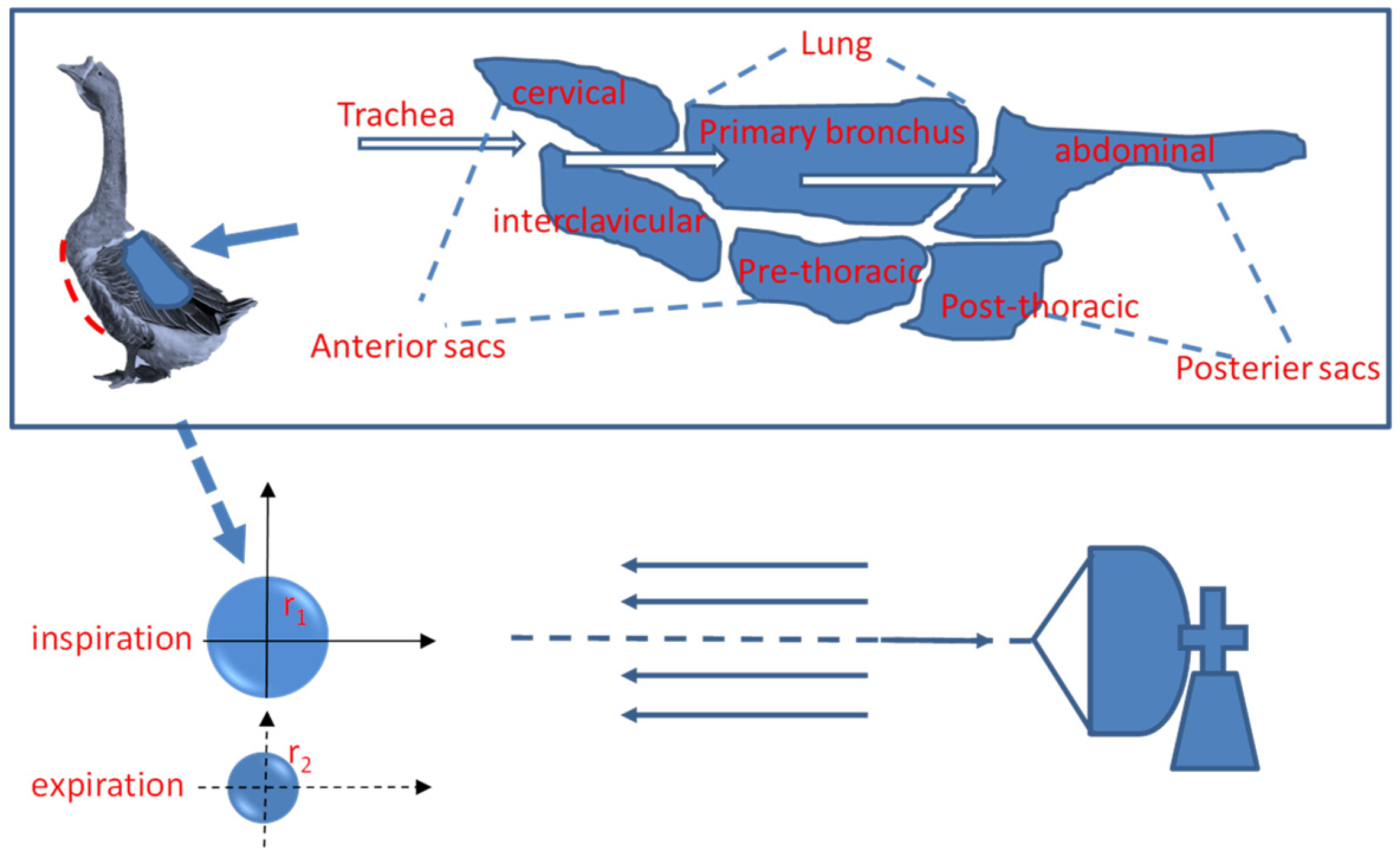
2.1. Theoretical Calculation
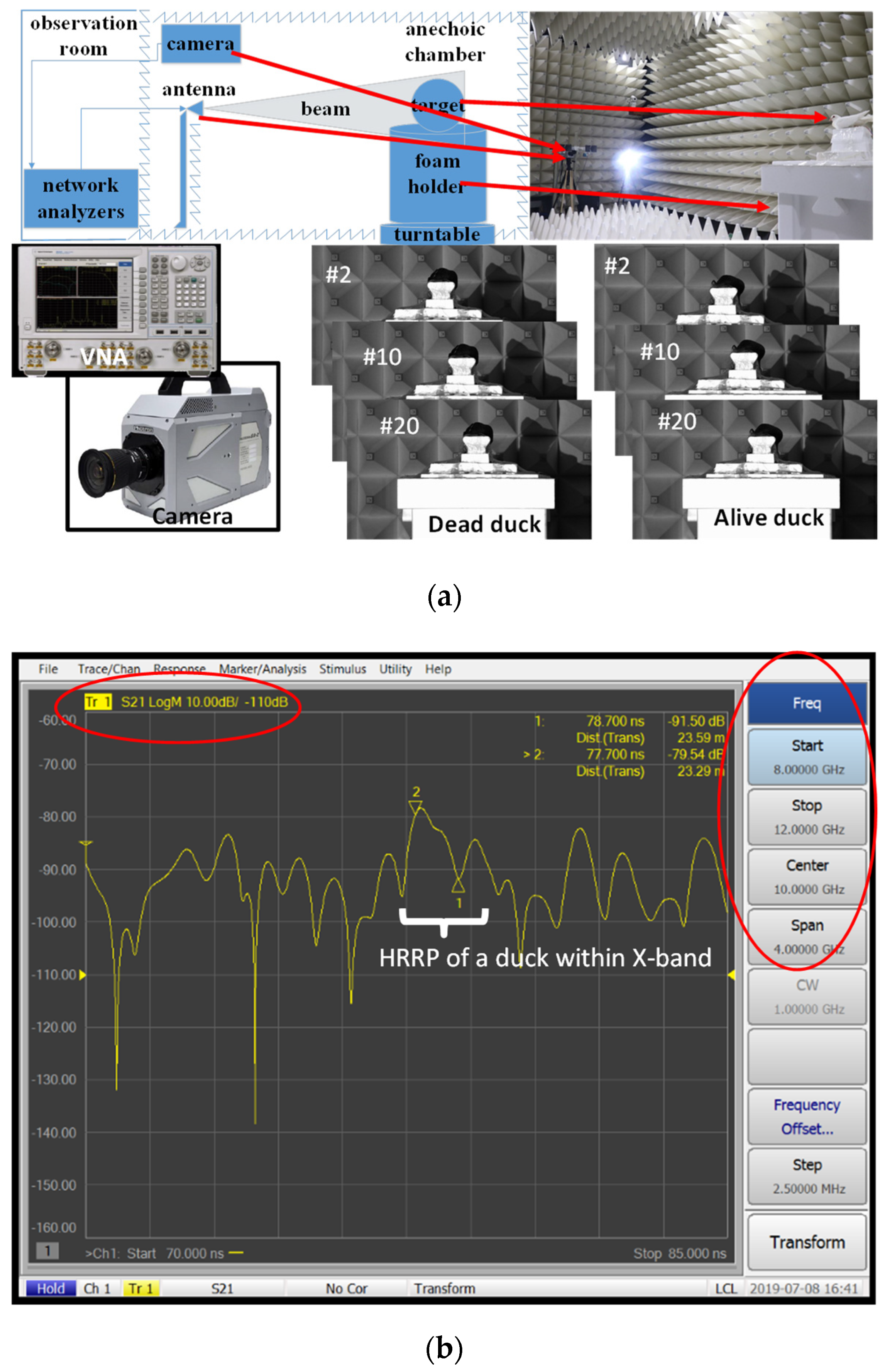
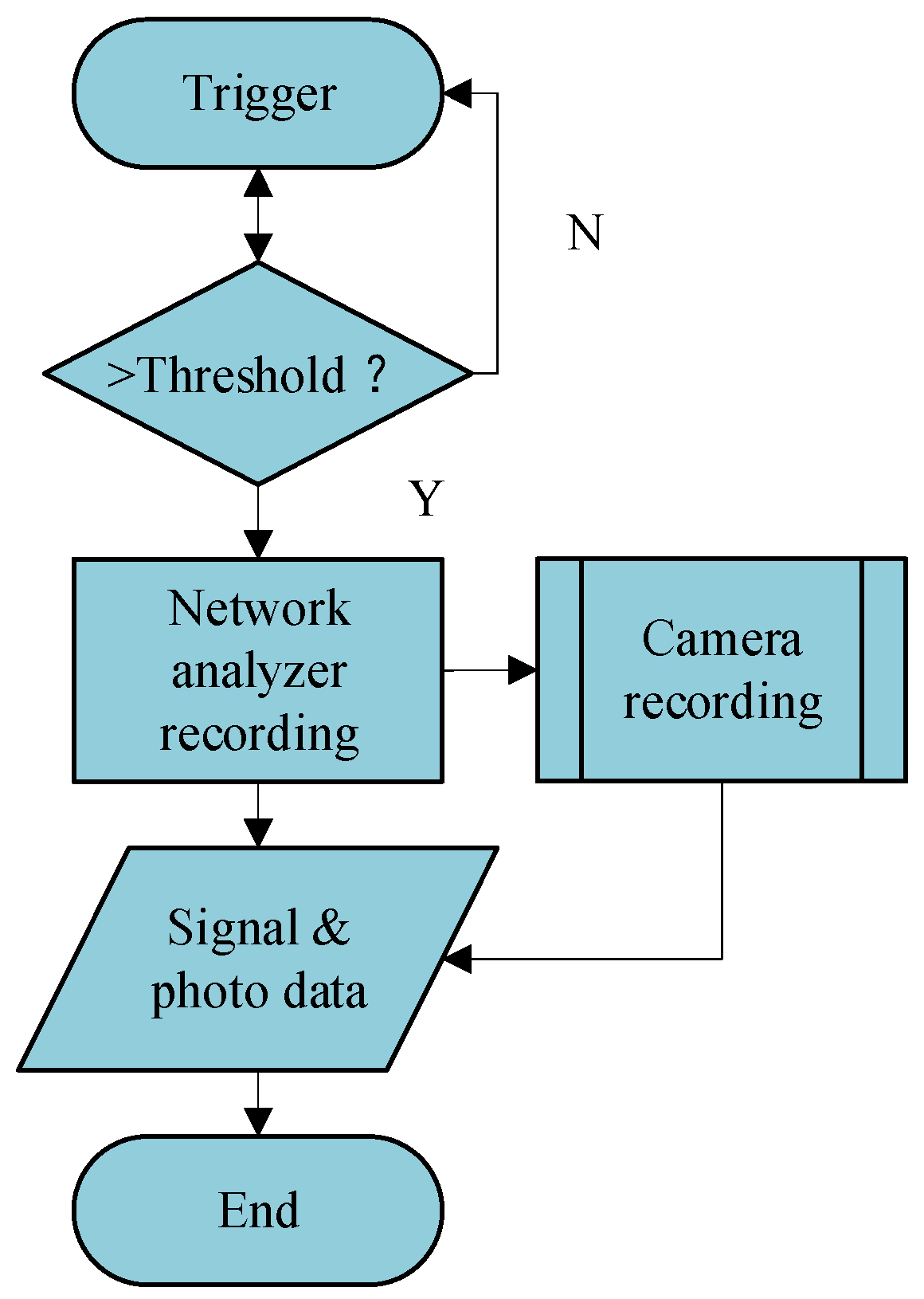
2.2. Measurement Systems
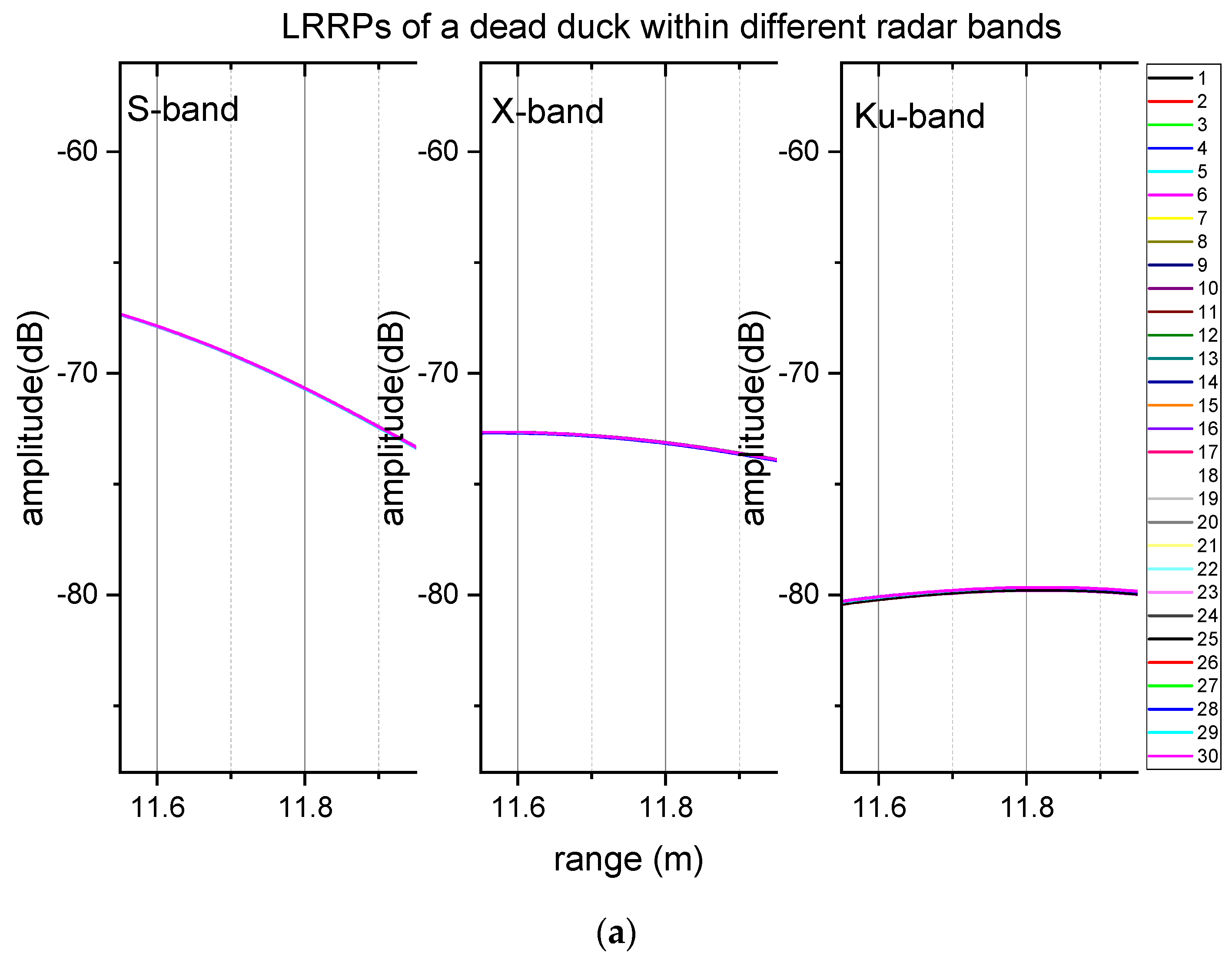
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schaefer, G.W. Bird Recognition by Radar A Study in Quantitative Radar Ornithology. In The Problems of Birds As Pests; Academic Press: London, UK, 1968; pp. 53–86. [Google Scholar]
- Torvik, B.; Olsen, K.E.; Griffiths, H. K-Band Radar Signature Analysis of a Flying Mallard Duck. In Proceedings of the International Radar Symposium, Dresden, Germany, 19–21 June 2013; Volume 2, pp. 584–592. [Google Scholar]
- Nohara, T.J.; Beason, R.C.; Weber, P. Using Radar Cross-Section to Enhance Situational Awareness Tools for Airport Avian Radars. Hum.-Wildl. Interact. 2011, 5, 210–217. [Google Scholar]
- Dokter, A.M.; Liechti, F.; Stark, H.; Delobbe, L.; Tabary, P.; Holleman, I. Bird Migration Flight Altitudes Studied by a Network of Operational Weather Radars. J. R. Soc. Interface 2011, 8, 30–43. [Google Scholar] [CrossRef] [PubMed]
- Vaughn, C.R. Birds and Insects as Radar Targets: A Review. Proc. IEEE 1985, 73, 205–227. [Google Scholar] [CrossRef]
- Torvik, B.; Knapskog, A.; Lie-Svendsen, Ø.; Olsen, K.E.; Griffiths, H.D. Amplitude Modulation on Echoes from Large Birds. In Proceedings of the European Microwave Week 2014: “Connecting the Future”, EuMW 2014—Conference Proceedings, EuRAD 2014: 11th European Radar Conference, Rome, Italy, 8–10 October 2014; pp. 177–180. [Google Scholar]
- Torvik, B.; Olsen, K.E.; Griffiths, H.D. X-Band Measurements of Radar Signatures of Large Sea Birds. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–6. [Google Scholar]
- Mirkovic, D.; Stepanian, P.M.; Kelly, J.F.; Chilson, P.B. Electromagnetic Model Reliably Predicts Radar Scattering Characteristics of Airborne Organisms. Sci. Rep. 2016, 6, 35637. [Google Scholar] [CrossRef] [PubMed]
- Bruderer, B. The Study of Bird Migration by Radar. Part 1: The Technical Basis. Naturwissenschaften 1997, 84, 26–28. [Google Scholar] [CrossRef]
- Pennycuick, C.J. The Flight of Birds and Other Animals. Aerospace 2015, 2, 505–523. [Google Scholar] [CrossRef]
- Farshchian, M.; Selesnick, I.; Parekh, A. Bird Body and Wing-Beat Radar Doppler Signature Separation Using Sparse Optimization. In Proceedings of the 2016 4th International Workshop on Compressed Sensing Theory and Its Applications to Radar, Sonar and Remote Sensing, CoSeRa, Aachen, Germany, 19–22 September 2016; pp. 71–74. [Google Scholar]
- Urmy, S.S.; Warren, J.D. Quantitative Ornithology with a Commercial Marine Radar: Standard-Target Calibration, Target Detection and Tracking, and Measurement of Echoes from Individuals and Flocks. Methods Ecol. Evol. 2017, 8, 860–869. [Google Scholar] [CrossRef]
- Martinson, L.W. A Preliminary Investigation of Bird Classification by Doppler Radar; the NASA Center for Aerospace Information (CASI). 1973. Available online: https://ntrs.nasa.gov/api/citations/19740009774/downloads/19740009774.pdf (accessed on 7 August 2022).
- Bruderer, B.; Steuri, T.; Baumgartner, M. Short-Range High-Precision Surveillance of Nocturnal Migration and Tracking of Single Targets. Isr. J. Zool. 1995, 41, 207–220. [Google Scholar] [CrossRef]
- Gauthreaux, S.A.; Belser, C.G. Radar Ornithology and Biological Conservation. Auk 2003, 120, 266–277. [Google Scholar] [CrossRef]
- Bruderer, B.; Peter, D.; Boldt, A.; Liechti, F. Wing-Beat Characteristics of Birds Recorded with Tracking Radar and Cine Camera. Ibis 2010, 152, 272–291. [Google Scholar] [CrossRef]
- Bruderer, B.; Popa-Lisseanu, A.G. Radar Data on Wing-Beat Frequencies and Flight Speeds of Two Bat Species. Acta Chiropterol. 2005, 7, 73–82. [Google Scholar] [CrossRef]
- Smith, E.N.; Peterson, C.; Thigpen, K. Body Temperature, Heart Rate and Respiration Rate of an Unrestrained Domestic Mallard Duck, Anas Platyrhynchos Domesticus. Comp. Biochem. Physiol. A Comp. Physiol. 1976, 54, 19–20. [Google Scholar] [CrossRef]
- Brown, R.E.; Brain, J.D.; Wang, N. The Avian Respiratory System: A Unique Model for Studies of Respiratory Toxicosis and for Monitoring Air Quality. Environ. Health Perspect. 1997, 105, 188–200. [Google Scholar] [CrossRef] [PubMed]
- Moon, J.R. Effects of Birds on Radar Tracking Systems. In Proceedings of the IEE Conference Publication, Edinburgh, UK, 15–17 October 2002; Volume 490, pp. 300–304. [Google Scholar]
- U.S. Department of Transportation, Airport Avian Radar Systems—Advisory Circular. 2005. Available online: https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC_150_5220-25.pdf (accessed on 7 August 2022).
- Nakamura, R.; Hadama, H. Characteristics of Ultra-Wideband Radar Echoes from a Drone. IEICE Commun. Express 2017, 6, 530–534. [Google Scholar] [CrossRef]
- Kent, B.M. Comparative Measurements of Precision Radar Cross Section (RCS) Calibration Targets. In Proceedings of the IEEE Antennas and Propagation Society, AP-S International Symposium (Digest), Boston, MA, USA, 8–13 July 2001; Volume 4, pp. 412–415. [Google Scholar]
- Bretz, W.L.; Schmidt-Nielsen, K. Bird Respiration: Flow Patterns in the Duck Lung. J. Exp. Biol. 1971, 54, 103–118. [Google Scholar] [CrossRef] [PubMed]
- Tait, P. Introduction to Radar Target Recognition; Institution of Electrical Engineers: New York, NY, USA, 2006; ISBN 9781849190831. [Google Scholar]
- Barbaresco, F.; Wasselin, J.P.; Jeantet, A.; Meier, U. Wake Vortex Profiling by Doppler X-Band Radar: Orly Trials at Initial Take-off & ILS Interception Critical Areas. In Proceedings of the 2008 IEEE Radar Conference, RADAR, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Marshall, R.E.; Myers, T.J. Wingtip Generated Wake Vortices as Radar Targets. IEEE Aerosp. Electron. Syst. Mag. 1996, 11, 27–30. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Content | Parameters | |||||
|---|---|---|---|---|---|---|
| Bands 1 | S-Band | X-Band | Ku-Band | |||
| Range profile 2 | HRRP | LRRP | HRRP | LRRP | HRRP | LRRP |
| Frequency (GHz) | 2–4 | 9–9.1 | 8–12 | 10–10.1 | 14–18 | 16–16.1 |
| Bandwidth (GHz) | 2 | 0.1 | 4 | 0.1 | 4 | 0.1 |
| Resolution (cm) | 7.5 | 150 | 3.75 | 150 | 3.75 | 150 |
| LRRP | HRRP | ||||
|---|---|---|---|---|---|
| Dead Duck | Living Duck | Dead Duck | Living Duck | ||
| S-band | Mean (dB) | −70.6949 | −74.9089 | −82.665 | −74.3358 |
| Scope (dB) | 0.0425 | 0.3765 | 1.0122 | 0.9605 | |
| X-band | Mean (dB) | −73.146 | −73.965 | −84.528 | −99.519 |
| Scope (dB) | 0.057 | 3.053 | 0.2246 | 4.062 | |
| Ku-band | Mean (dB) | −79.720 | −83.146 | −98.167 | −98.777 |
| Scope (dB) | 0.137 | 2.621 | 0.235 | 3.772 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Yan, J.; Li, D.; Hu, H.; Kong, D.; Bao, W.; Wu, S. Measurement and Analysis of Radar Signals Modulated by the Respiration Movement of Birds. Appl. Sci. 2022, 12, 8101. https://doi.org/10.3390/app12168101
Gong J, Yan J, Li D, Hu H, Kong D, Bao W, Wu S. Measurement and Analysis of Radar Signals Modulated by the Respiration Movement of Birds. Applied Sciences. 2022; 12(16):8101. https://doi.org/10.3390/app12168101
Chicago/Turabian StyleGong, Jiangkun, Jun Yan, Deren Li, Huiping Hu, Deyong Kong, Wenjing Bao, and Shangde Wu. 2022. "Measurement and Analysis of Radar Signals Modulated by the Respiration Movement of Birds" Applied Sciences 12, no. 16: 8101. https://doi.org/10.3390/app12168101
APA StyleGong, J., Yan, J., Li, D., Hu, H., Kong, D., Bao, W., & Wu, S. (2022). Measurement and Analysis of Radar Signals Modulated by the Respiration Movement of Birds. Applied Sciences, 12(16), 8101. https://doi.org/10.3390/app12168101