
Finite Element Analysis of the Distribution Parameters of a Metal Dot Array in a SAW Gyroscope



Abstract
:1. Introduction
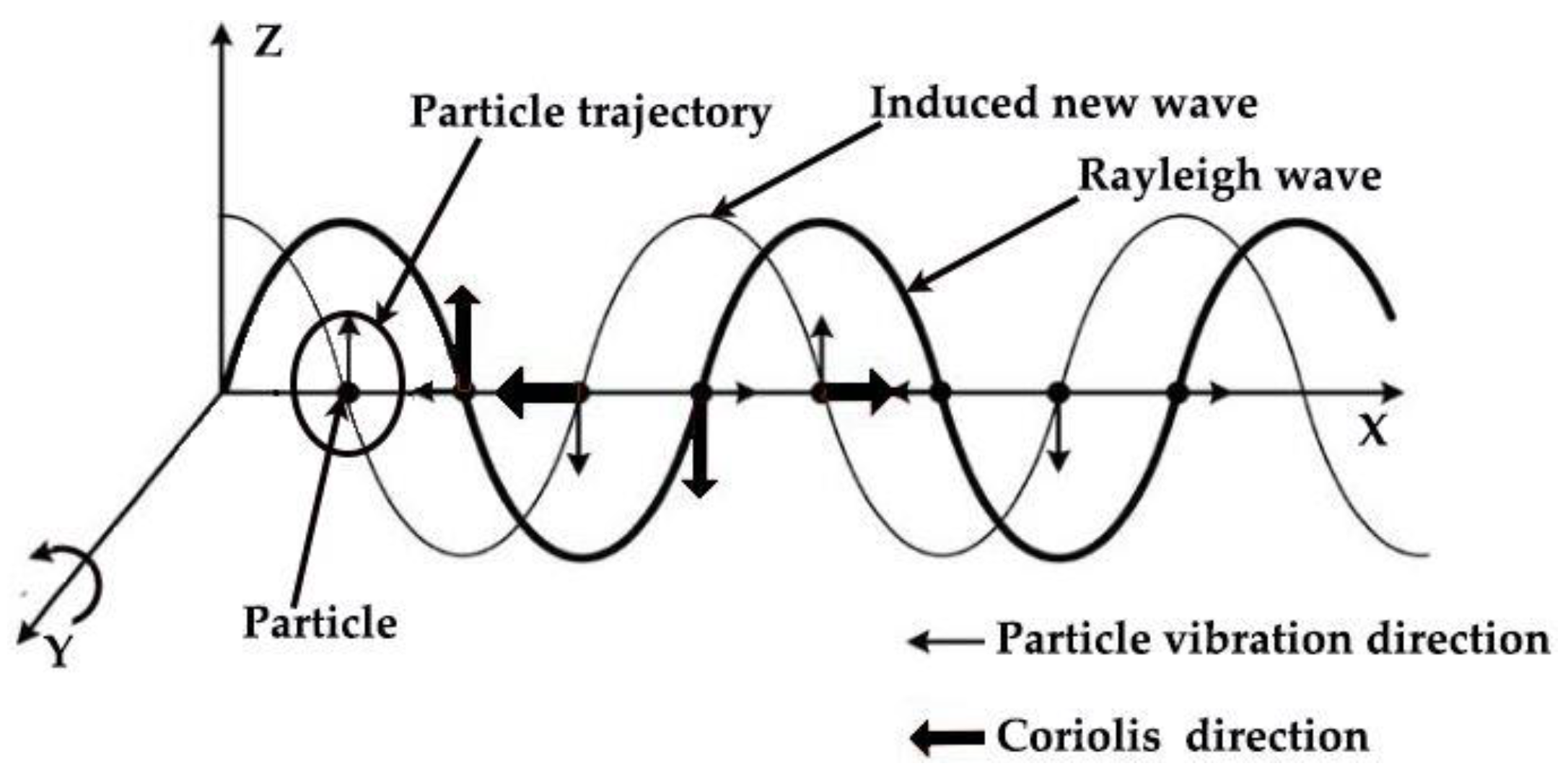
2. Theoretical Analysis
3. Modeling and Simulation
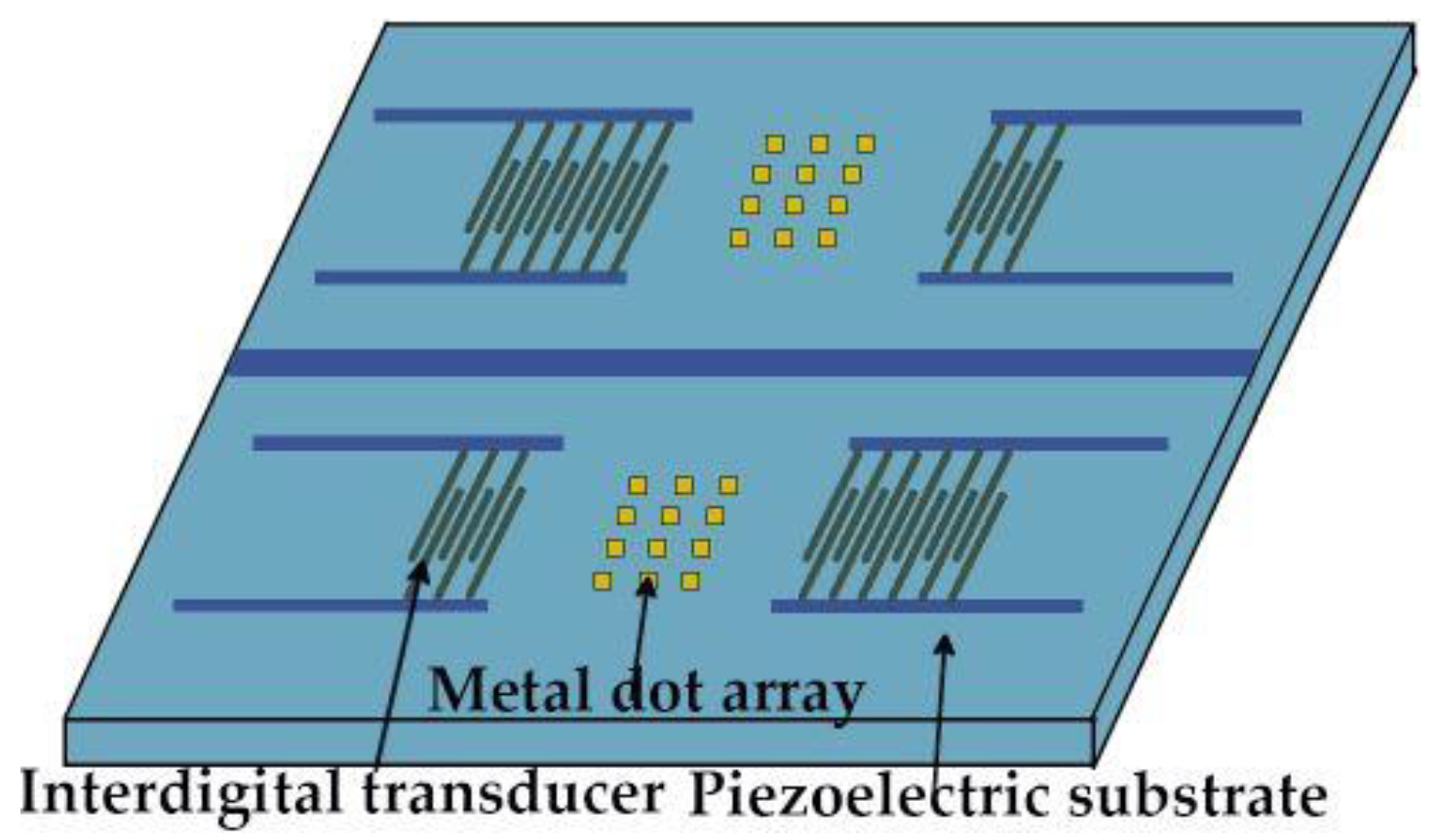
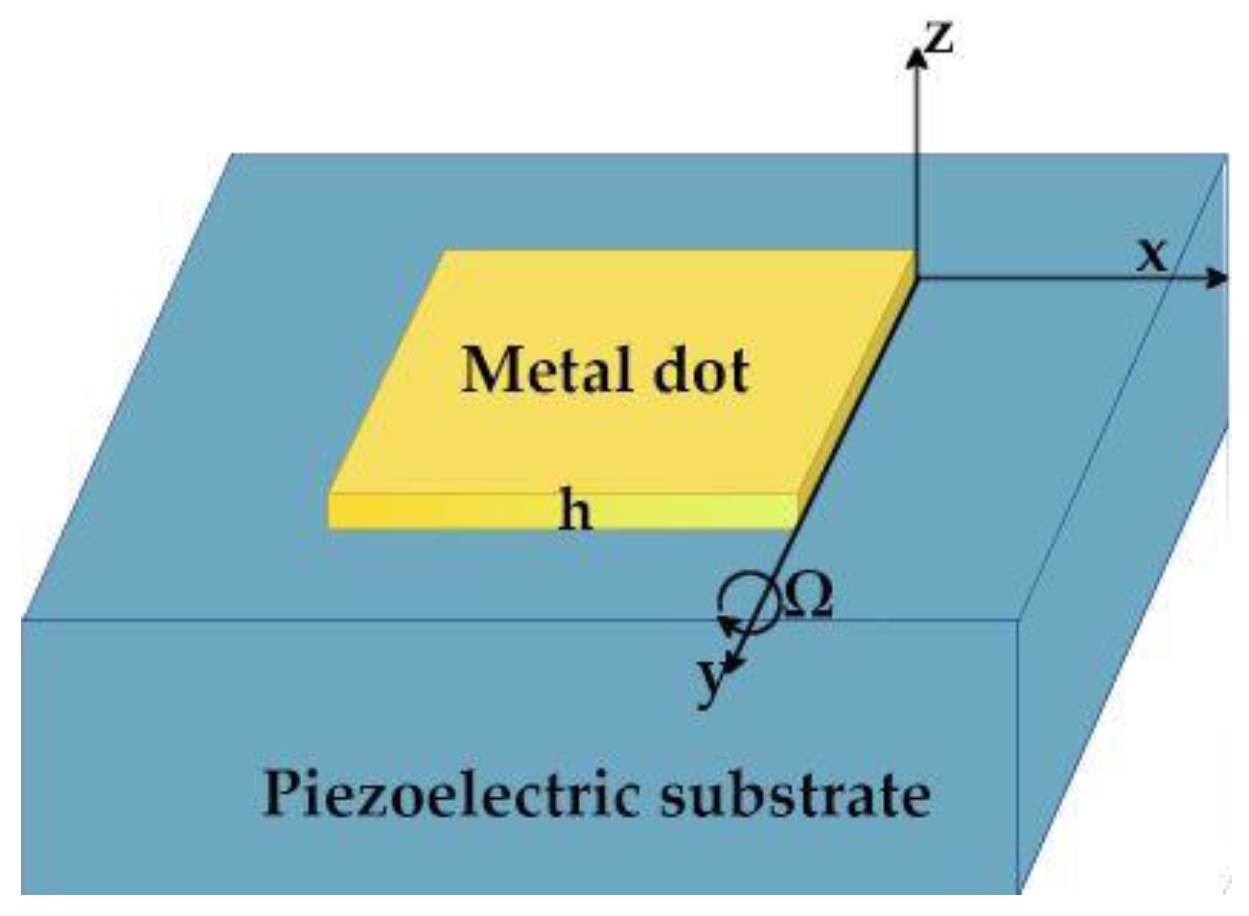
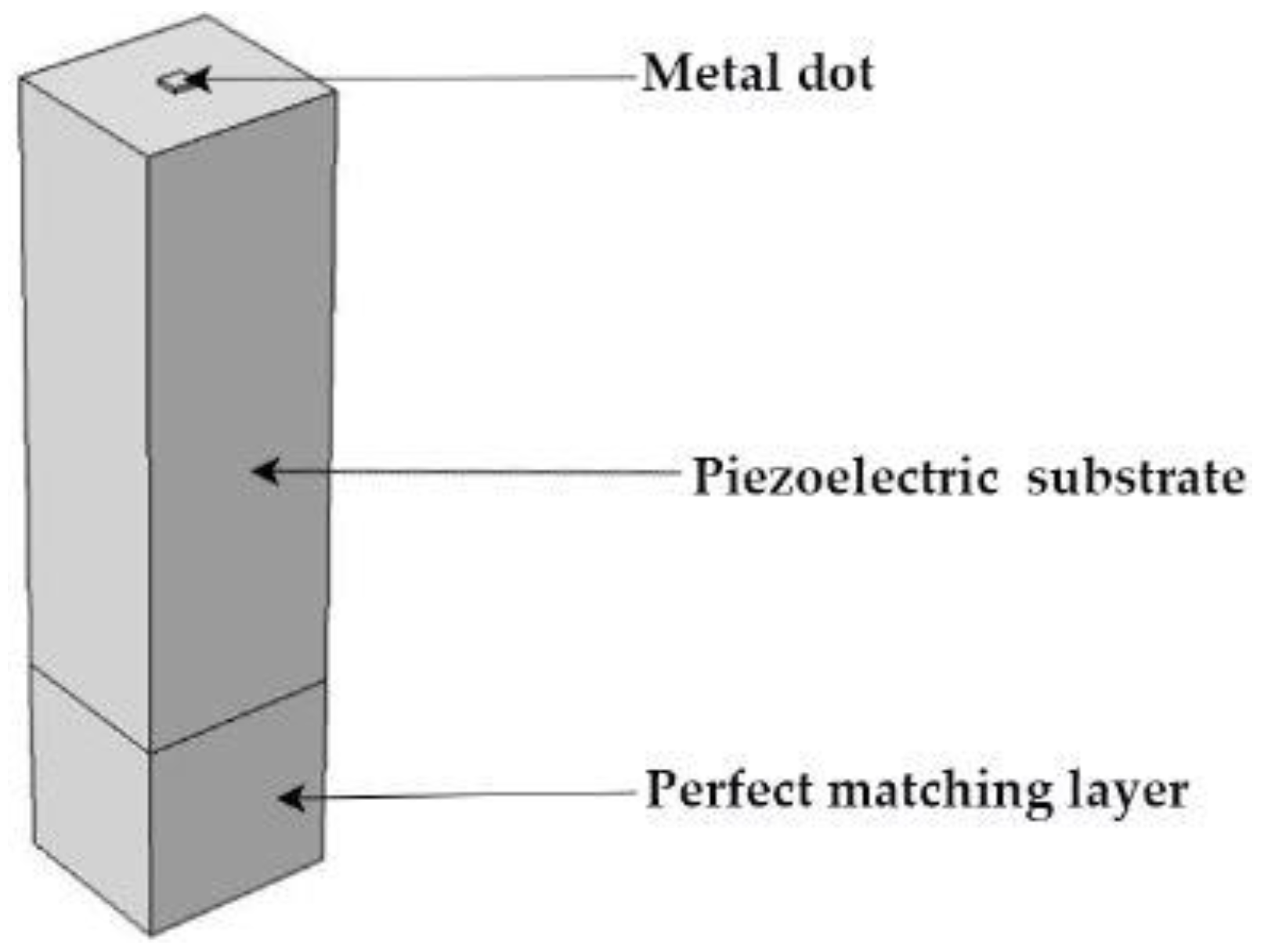
3.1. Modeling
3.2. Simulation Results and Discussion
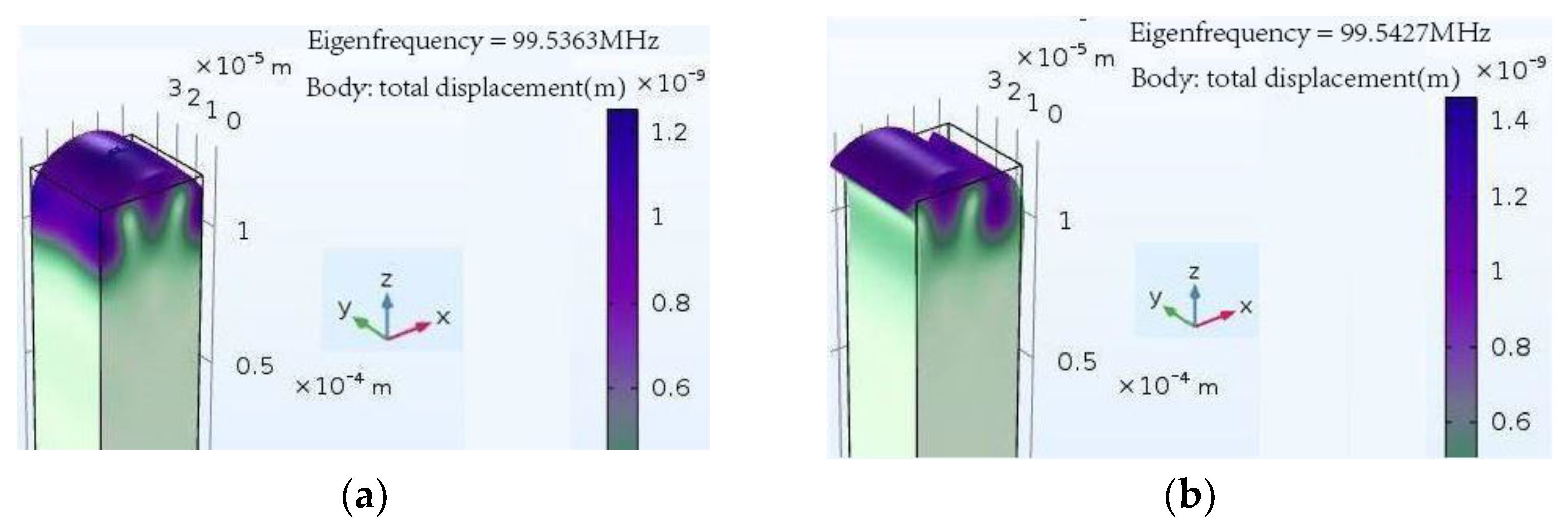
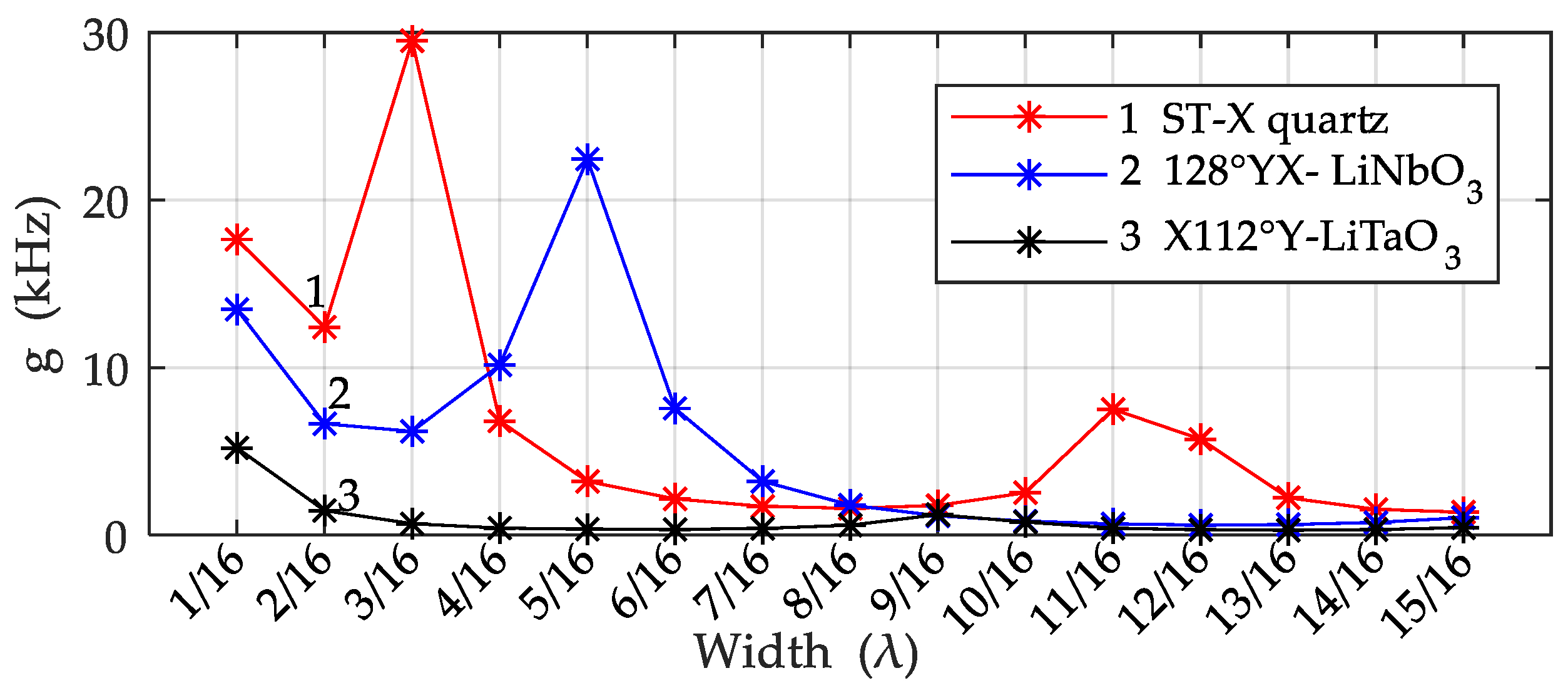
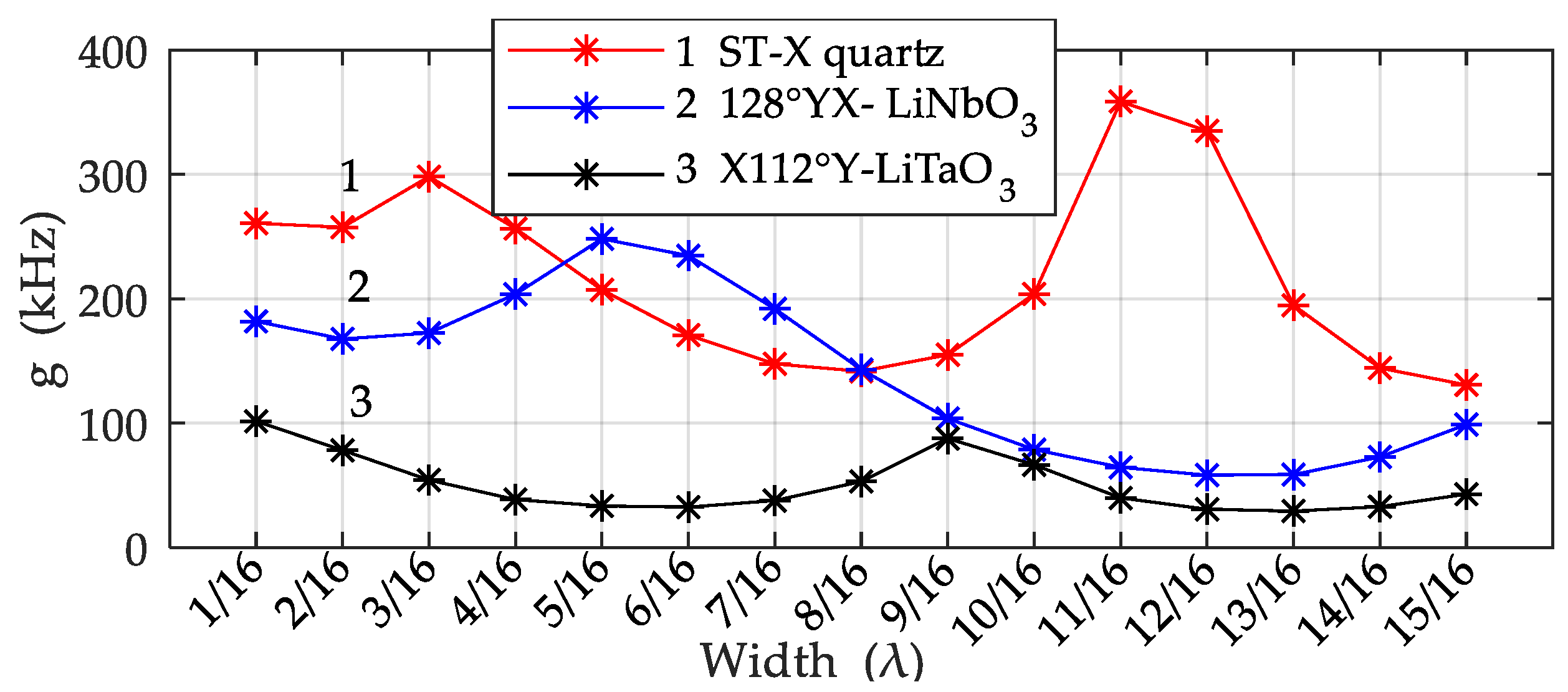
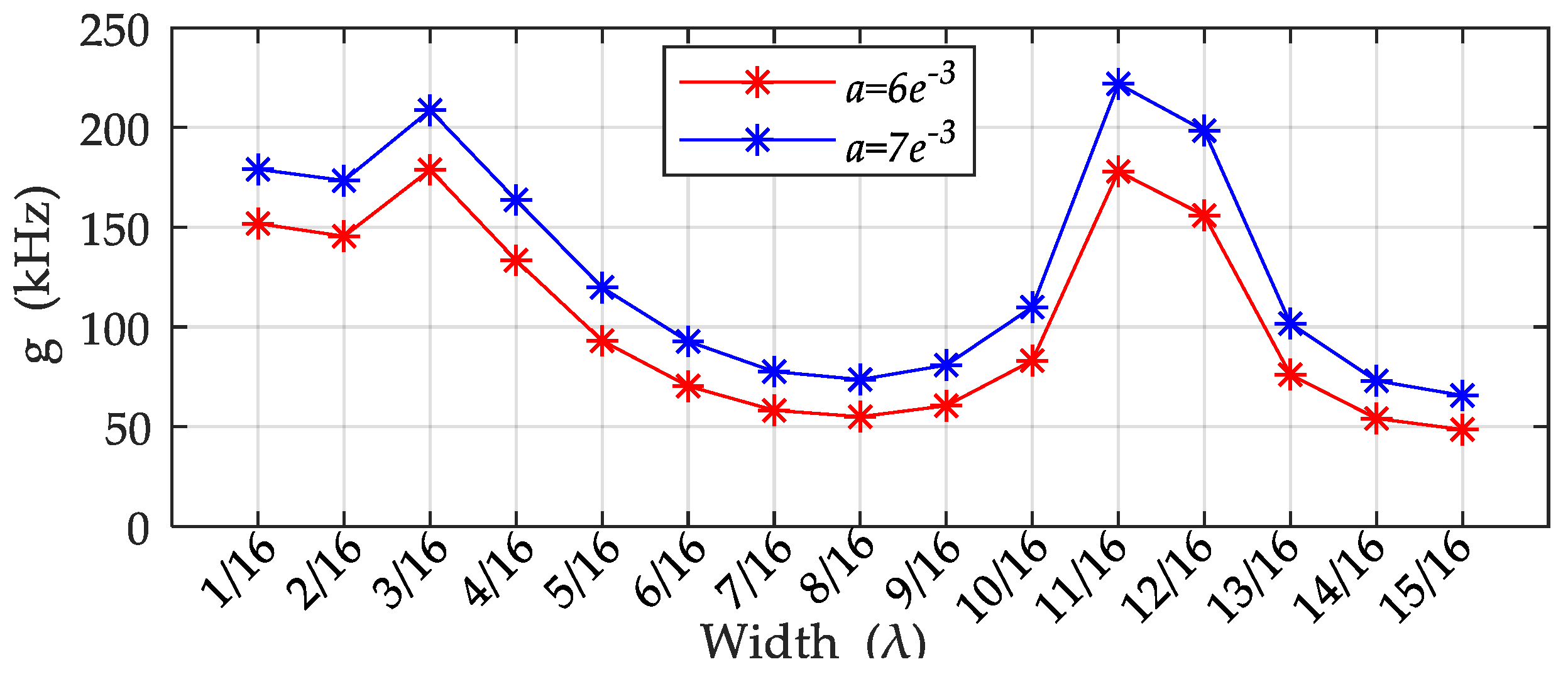
3.2.1. The Influence of the Size of the Metal Dot Array on the SAW Gyroscope Effect
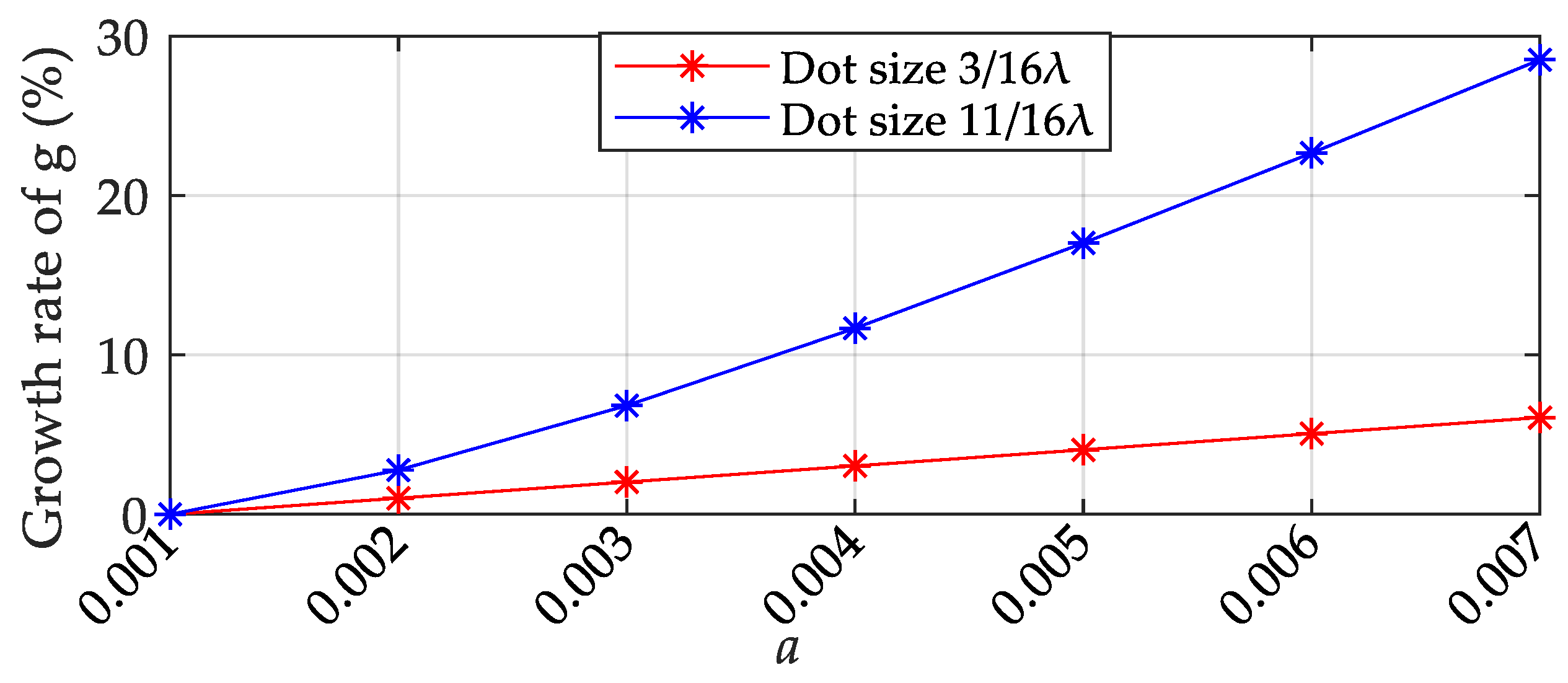
3.2.2. Influence of Rotation Speed on the Distribution Parameters of the Metal Dot Array
3.2.3. The Relationship between the Metal Dot Array Distribution Parameters and Rotation Speed in a ST-X Quartz Substrate
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Campbell, C. Surface Acoustic Wave Devices and Their Signal Processing Applications, 1st ed.; Academic Press: San Diego, CA, USA, 1989. [Google Scholar]
- Xuan, W.; He, M.; Meng, N.; He, X.; Wang, W.; Chen, J.; Shi, T.; Hasan, T.; Xu, Z.; Xu, Y.; et al. Fast Response and High Sensitivity ZnO/glass Surface Acoustic Wave Humidity Sensors Using Graphene Oxide Sensing Layer. Sci. Rep. 2014, 4, 7206. [Google Scholar] [CrossRef] [PubMed]
- Achour, B.; Attia, G.; Zerrouki, C.; Fourati, N.; Raoof, K.; Yaakoubi, N. Simulation/Experiment Confrontation, an Efficient Approach for Sensitive SAW Sensors Design. Sensors 2020, 20, 4994. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Fu, S.; Su, R.; Shen, J.; Zeng, F.; Song, C.; Pan, F. Enhanced Coupling Coefficient in Dual-Mode ZnO/SiC Surface Acoustic Wave Devices with Partially Etched Piezoelectric Layer. Appl. Sci. 2021, 11, 6383. [Google Scholar] [CrossRef]
- Ma, X.; Lei, H.; Cai, P.; Ji, X. Fast Extraction of Coupling of Modes Parameters for Surface Acoustic Wave Devices Using Finite Element Method Based Simulation. Appl. Sci. 2022, 12, 4547. [Google Scholar] [CrossRef]
- Woods, R.C.; Kalami, H.; Johnson, B. Evaluation of a novel surface acoustic wave gyroscope. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 49, 136–141. [Google Scholar] [CrossRef]
- Oh, H.; Lee, K.; Yang, S.; Wang, W. Enhanced sensitivity of a surface acoustic wave gyroscope using a progressive wave. J. Micromech. Microeng. 2011, 21, 5015. [Google Scholar] [CrossRef]
- Lee, M.; Lee, K. Enhancing the sensitivity of three-axis detectable surface acoustic wave gyroscope by using a floating thin piezoelectric membrane. Jpn. J. Appl. Phys. 2017, 56, 06GN14. [Google Scholar] [CrossRef]
- Sun, X.; Liu, W.; Ge, S.; Zhou, S.; Li, X.; Li, D. Achieving both high electromechanical response and stable temperature behavior in Si/SiO2/Al/LiTaO3 sandwich structure. AIP Adv. 2019, 9, 035145. [Google Scholar] [CrossRef]
- Sun, X.; Ge, S.; Shao, X.; Zhou, S.; Wang, W.; Lin, D.; Liu, W. Analysis and Design of Single-Phase Unidirectional Transducers with High Directivity. Appl. Sci. 2021, 11, 7500. [Google Scholar] [CrossRef]
- Sun, X.; Liu, W.; Shao, X.; Zhou, S.; Wang, W.; Lin, D. Surface Acoustic Wave Gyroscopic Effect in an Interdigital Transducer. Sensors 2019, 19, 106. [Google Scholar] [CrossRef]
- Shen, J.; Fu, S.; Su, R.; Xu, H.; Lu, Z.; Xu, Z.; Luo, J.; Zeng, F.; Song, C.; Wang, W.; et al. High-Performance Surface Acoustic Wave Devices Using LiNbO3/SiO2/SiC Multilayered Substrates. IEEE Trans. Microw. Theory Tech. 2021, 69, 3693–3705. [Google Scholar] [CrossRef]
- Wang, W.; Shao, X.; Liu, X.; Liu, J.; He, S. Enhanced Sensitivity of Surface Acoustic Wave-Based Rate Sensors Incorporating Metallic Dot Arrays. Sensors 2014, 14, 3908–3920. [Google Scholar] [CrossRef]
- Xu, F.; Wang, W.; Shao, X.; Liu, X.; Liang, Y. Optimization of Surface Acoustic Wave-Based Rate Sensors. Sensors 2015, 15, 25761–25773. [Google Scholar] [CrossRef]
- Mandal, D.; Banerjee, S. Surface Acoustic Wave (SAW) Sensors: Physics, Materials, and Applications. Sensors 2022, 22, 820. [Google Scholar] [CrossRef]
- Sun, Y.; Jia, Y.; Zhang, Y.; Cheng, L.; Liang, Y.; Wang, W. Enhanced Sensitivity of FeGa Thin-Film Coated SAW Current Sensor. Appl. Sci. 2021, 11, 11726. [Google Scholar] [CrossRef]
- Borrero, G.A.; Bravo, J.P.; Mora, S.F.; Velásquez, S.; Segura-Quijano, F.E. Design and fabrication of SAW pressure, temperature and impedance sensors using novel multiphysics simulation models. Sens. Actuators A Phys. 2013, 203, 204–214. [Google Scholar] [CrossRef]
- Ma, R.; Liu, W.; Sun, X.; Zhou, S.; Lin, D. FEM Simulation of a High-Performance 128°Y–X LiNbO3/SiO2/Si Functional Substrate for Surface Acoustic Wave Gyroscopes. Micromachines 2022, 13, 202. [Google Scholar] [CrossRef]
- Kovacs, G.; Anhorn, M.; Engan, H.E.; Visintini, G.; Ruppel, C.C.W. Improved material constants for LiNbO3 and LiTaO3. In Proceedings of the IEEE Ultrasonics Symposium, Honolulu, HI, USA, 4–7 December 1990; pp. 435–438. [Google Scholar]
- Kushibiki, J.; Takanaga, I.; Arakawa, M.; Sannomiya, T. Accurate measurements of the acoustical physical constants of LiNbO3 and LiTaO3 single crystals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 1315–1323. [Google Scholar] [CrossRef]
- Tomar, M.; Gupta, V.; Mansingh, A.; Sreenivas, K. Temperature stability of c-axis oriented LiNbO3/SiO2/Si thin film layered structures. J. Phys. D Appl. Phys. 2001, 34, 2267. [Google Scholar] [CrossRef]
- Bechmann, R.; Ballato, D.; Lukaszek, T.J. Higher-Order Temperature Coefficients of the Elastic Stiffinesses and Compliances of Alpha-Quartz. Proc. IRE 1962, 50, 1812–1822. [Google Scholar] [CrossRef]
- Nelsa Abraham, R.; Reshma Krishnakumar, C.; Unni, D.P. Simulation studies on the responses of ZnO-CuO/CNT nanocomposite based SAW sensor to various volatile organic chemicals. J. Sci. Adv. Mater. Devices 2019, 4, 125–131. [Google Scholar] [CrossRef]
- Ge, F.; Zhao, L.; Zhang, Y. Design and Optimization of a Novel SAW Gyroscope Structure Based on Amplitude Modulation with 1-D Phononic Crystals. Micromachines 2021, 12, 1485. [Google Scholar] [CrossRef]
- Shevchenko, S.Y.; Kukaev, A.S.; Yakubovskaya, G.V. Features of surface acoustic wave delay line simulation in inertial space. In Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Moscow/St. Petersburg, Russia, 29 January–1 February 2018; pp. 544–548. [Google Scholar]
- Hu, F.; Cheng, L.; Fan, S.; He, X.; Xue, X.; Liang, Y.; Lu, M.; Wang, W. Enhanced Sensitivity of Wireless and Passive SAW-Based Strain Sensor with a Differential Structure. IEEE Sens. J. 2021, 21, 23911–23916. [Google Scholar] [CrossRef]
- Hu, S.M.; Hu, Y.F.; Cao, X.S.; Tian, S.M. Gyro Effect on Surface Acoustic Wave Propagation in A Piezoelectric Layered Structure. In Proceedings of the 2019 14th Symposium on Piezoelectrcity, Acoustic Waves and Device Applications (SPAWDA), Shijiazhuang, China, 1–4 November 2019; pp. 1–5. [Google Scholar]
- Zhou, Y.H.; Jiang, Q. Effects of Coriolis force and centrifugal force on acoustic waves propagating along the surface of a piezoelectric half-space. Z. Angew. Math. Phys. 2001, 52, 950–965. [Google Scholar] [CrossRef]
- Wang, W.; Xu, F.; He, S.; Li, S.; Lee, K. A New Micro-rate Sensor Based on Shear Horizontal Surface Acoustic Wave Gyroscopic Effect. Jpn. J. Appl. Phys. 2010, 49, 9R. [Google Scholar] [CrossRef]
- Han, W.; Bu, X.; Cao, Y.; Xu, M. SAW Torque Sensor Gyroscopic Effect Compensation by Least Squares Support Vector Machine Algorithm Based on Chaos Estimation of Distributed Algorithm. Sensors 2019, 19, 2768. [Google Scholar] [CrossRef]
- Biryukov, S.V.; Schmidt, H.; Weihnacht, M. Gyroscopic effect for SAW in common piezoelectric crystals. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009; pp. 2133–2136. [Google Scholar]
- Lukyanov, D.; Shevchenko, S.; Kukaev, A. Micro rate gyroscopes based on surface acoustic waves. In Proceedings of the 2014 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, Beijing, China, 30 October–2 November 2014; pp. 14–17. [Google Scholar]
- Shen, W.; Li, D.; Zhang, S.; Ou, J. Analysis of wave motion in one-dimensional structures through fast-Fourier-transform-based wavelet finite element method. J. Sound Vib. 2017, 400, 369–386. [Google Scholar] [CrossRef]
- Lukyanov, D.P.; Filatov, Y.V.; Shevchenko, S.Y.; Shevelko, M.M.; Peregudov, A.N.; Kukaev, A.S.; Safronov, D.V. State of the art and prospects for the development of SAW-based solid-state gyros. Gyroscopy Navig. 2011, 2, 214. [Google Scholar] [CrossRef]
- Koskela, J.; Plessky, V.; Maniadis, P.; Turner, P.; Willemsen, B. Rapid 2D FEM simulation of advanced SAW devices. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 1484–1486. [Google Scholar]
- Salim, Z.T.; Hashim, U.; Arshad, M.K.M. FEM modeling and simulation of a layered SAW device based on ZnO/128° YX LiNbO3. In Proceedings of the 2016 IEEE International Conference on Semiconductor Electronics (ICSE), Kuala Lumpur, Malaysia, 17–19 August 2016; pp. 5–8. [Google Scholar]
- Martinez, S.M.; Vera, J.E.; Molina, F.B.; Chaverra, J.F. Design and Characterization of a SAW Pressure Sensor on ST Quartz Using a Multiphysic Model. In Proceedings of the 2021 IEEE XXVIII International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 5–7 August 2021; pp. 1–4. [Google Scholar]
- Maouhoub, S.; Aoura, Y.; Mir, A. FEM simulation of AlN thin layers on diamond substrates for high frequency SAW devices. Diam. Relat. Mater. 2016, 62, 7–13. [Google Scholar] [CrossRef]
- Luo, J.; He, C.; Mao, R. Gas Sensor Based on Surface Acoustic Waves Using Zinc Oxide Piezoelectric Thin Films. In Proceedings of the 2019 3rd International Conference on Circuits, System and Simulation (ICCSS), Nanjing, China, 13–15 June 2019; pp. 50–53. [Google Scholar]
- Yamada, K.; Takemura, H.; Inoue, Y.; Omi, T.; Matsumura, S. Effect of Li/Nb Ratio on the SAW Velocity of 128°Y–X LiNbO3 Wafers. Jpn. J. Appl. Phys. 1987, 26, 219. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Li, H.; Hu, H. A Novel Method to Extract COM Parameters for SAW Based on FEM. In Proceedings of the 2019 13th Symposium on Piezoelectrcity, Acoustic Waves and Device Applications (SPAWDA), Harbin, China, 11–14 January 2019; pp. 1–5. [Google Scholar]
- An, Y.; Hao, W.; Liu, J.; He, S. Effect of electrode width on the sensitivity of the surface acoustic wave detector in a GC/SAW. In Proceedings of the 2017 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Chengdu, China, 27–30 October 2017; pp. 139–141. [Google Scholar]
- Belkhelfa, N.; Serhane, R. Silicon SAW parameters extraction and optimization using finite elements analysis. In Proceedings of the 2019 International Conference on Advanced Electrical Engineering (ICAEE), Algiers, Algeria, 19–21 November 2019; pp. 1–5. [Google Scholar]
- Mishra, D.; Singh, A. Sensitivity of a surface acoustic wave based gas sensor: Design and simulation. In Proceedings of the 2015 International Conference on Soft Computing Techniques and Implementations (ICSCTI), Faridabad, India, 8–10 October 2015; pp. 1–5. [Google Scholar]
- Herasymenko, D.O.; Zhovnir, M.F.; Pysarenko, L.D. Angular Velocity Transducer with Ring Resonator of Surface Acoustic Waves. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018; pp. 734–738. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Constants | Materials | |||
|---|---|---|---|---|
| 128°YX-LiNbO3 | X112°Y-LiTaO3 | ST−X Quartz | Cu | |
| SAW type | RSAW | RSAW | RSAW | |
| Euler angle | (0°, 37.86°, 0°) | (90°, 90°, 112.2°) | (0°, 132.75°, 0°) | |
| (%) | 5.4 | 0.71 | 0.11 | |
| TCF (ppm/°C) | −72 | −18.2 | 0 | |
| Stiffness constants (1011 N/m2) | ||||
| 1.98 | 2.32 | 0.87 | 1.77 | |
| 0.54 | 0.46 | 0.07 | 1.24 | |
| 0.65 | 0.83 | 0.12 | ||
| 0.07 | −0.11 | −0.18 | ||
| 2.27 | 2.75 | 1.07 | ||
| 0.59 | 0.95 | 0.58 | 0.82 | |
| Piezoelectric constants (C/m2) | ||||
| 0.171 | ||||
| −0.0436 | ||||
| 3.69 | 2.64 | |||
| 2.42 | 1.86 | |||
| 0.30 | −0.22 | |||
| 1.77 | 1.71 | |||
| 0.14 | ||||
| Dielectric constants (10−12 F/m) | ||||
| 45.6 × | 40.9 × | 4.5 × | ||
| 26.3 × | 42.5 × | 4.6 × | ||
| 8.854 | 8.854 | 8.854 | ||
| Piezoelectric Substrate | Width | (%) | TCF (ppm/°C) | ||
|---|---|---|---|---|---|
| ST-X Quartz | 0.11 | 0 | 29.5 kHz | ||
| 128°YX-LiNbO3 | 5.4 | −72 | 22.4 kHz | ||
| X112°Y-LiTaO3 | 0.71 | −18.2 | 5.2 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Lu, M.; Meng, L.; Wang, W.; Shao, X. Finite Element Analysis of the Distribution Parameters of a Metal Dot Array in a SAW Gyroscope. Appl. Sci. 2022, 12, 8062. https://doi.org/10.3390/app12168062
Chen H, Lu M, Meng L, Wang W, Shao X. Finite Element Analysis of the Distribution Parameters of a Metal Dot Array in a SAW Gyroscope. Applied Sciences. 2022; 12(16):8062. https://doi.org/10.3390/app12168062
Chicago/Turabian StyleChen, Hengbiao, Mengjiao Lu, Lili Meng, Wen Wang, and Xiuting Shao. 2022. "Finite Element Analysis of the Distribution Parameters of a Metal Dot Array in a SAW Gyroscope" Applied Sciences 12, no. 16: 8062. https://doi.org/10.3390/app12168062
APA StyleChen, H., Lu, M., Meng, L., Wang, W., & Shao, X. (2022). Finite Element Analysis of the Distribution Parameters of a Metal Dot Array in a SAW Gyroscope. Applied Sciences, 12(16), 8062. https://doi.org/10.3390/app12168062