
Optimal Design and Experiment of Manipulator for Camellia Pollen Picking

Abstract
:1. Introduction
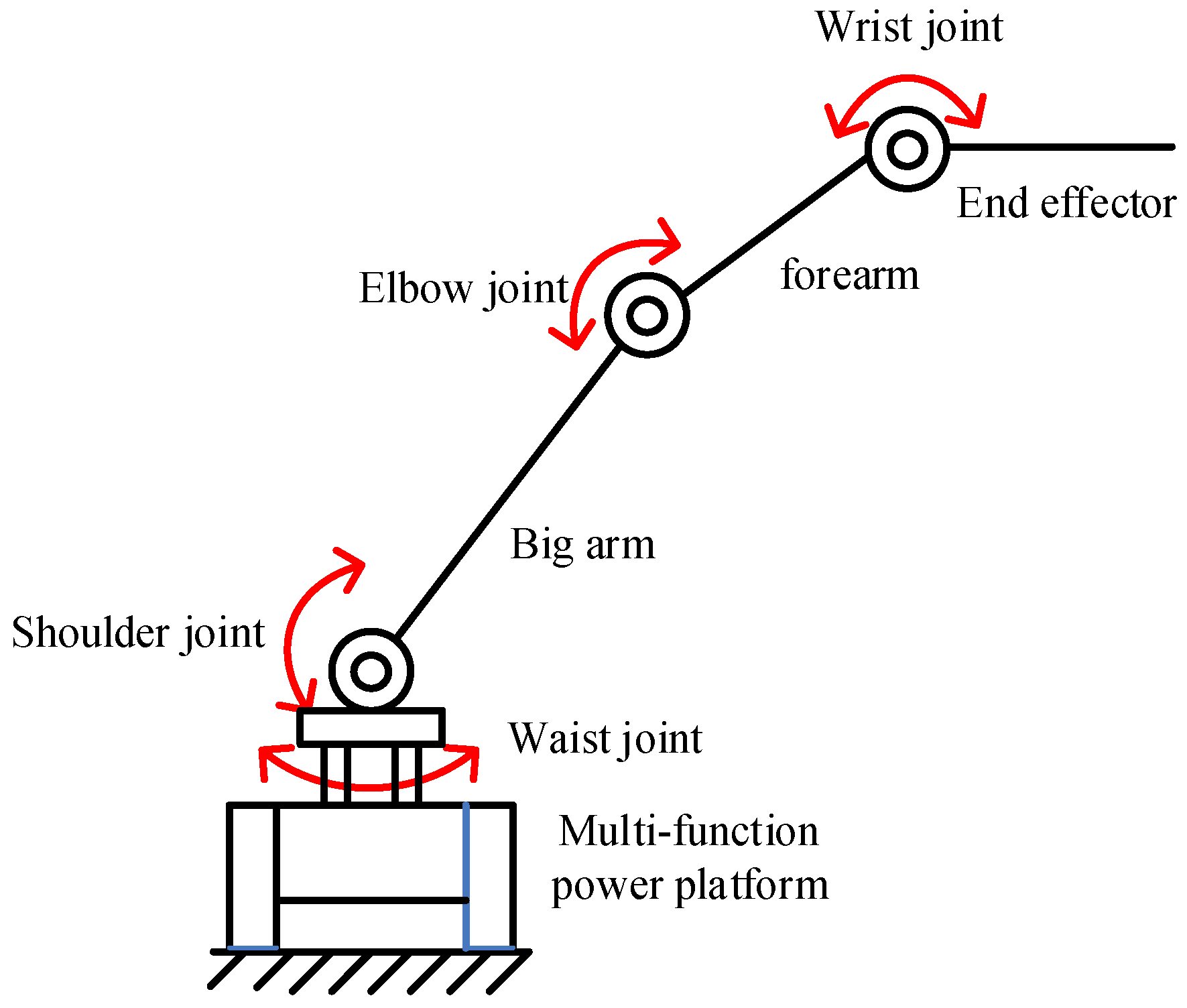
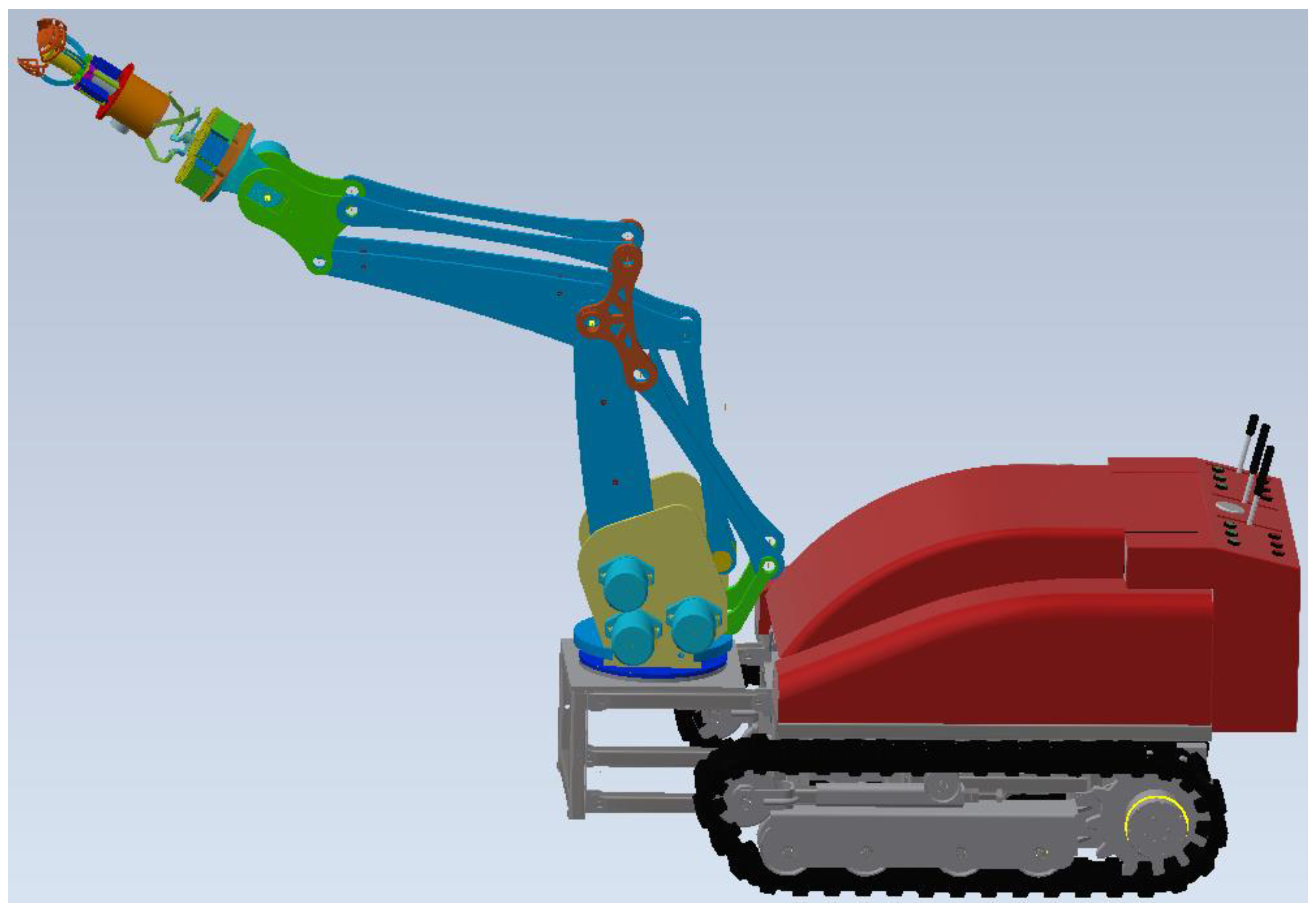
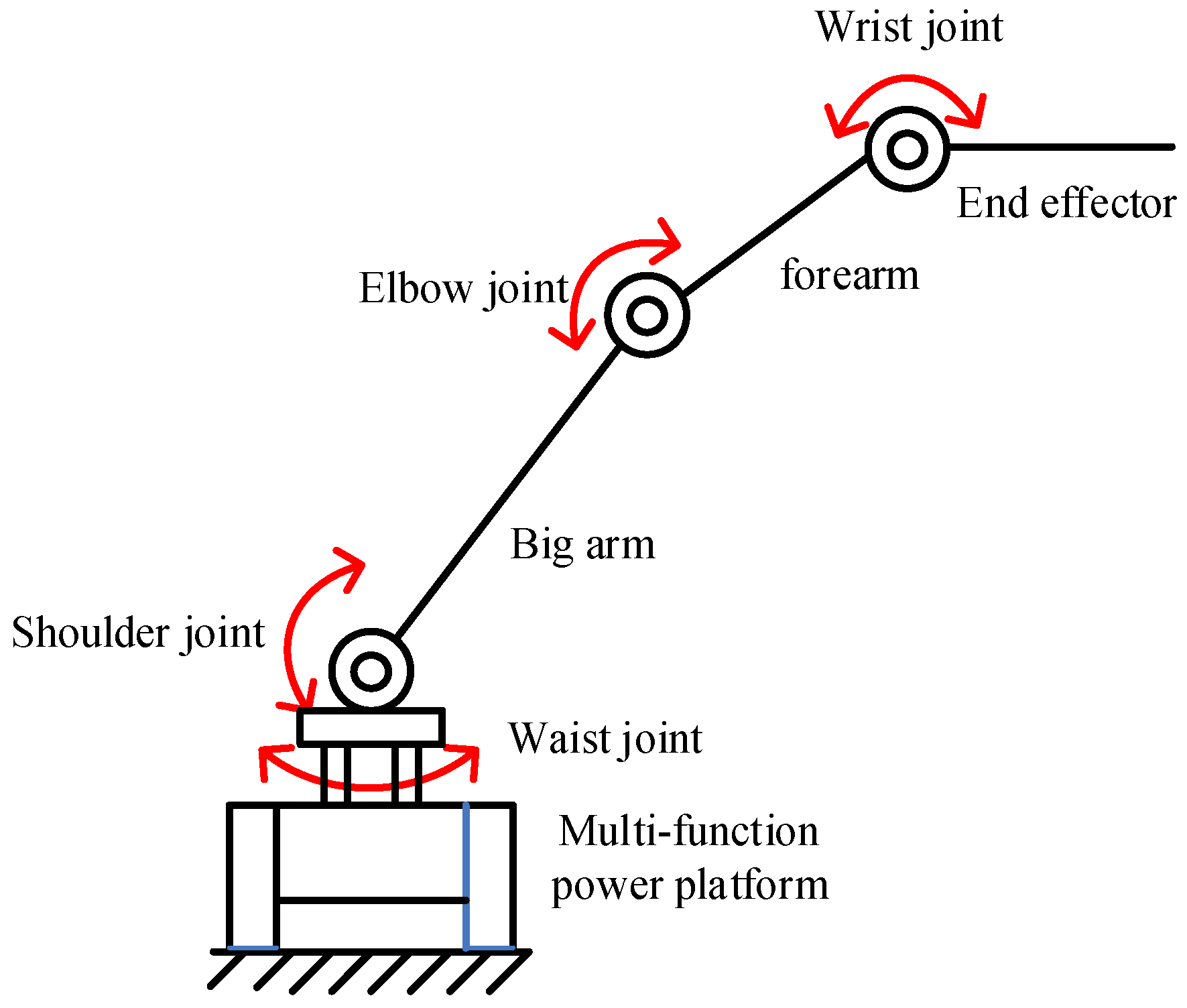
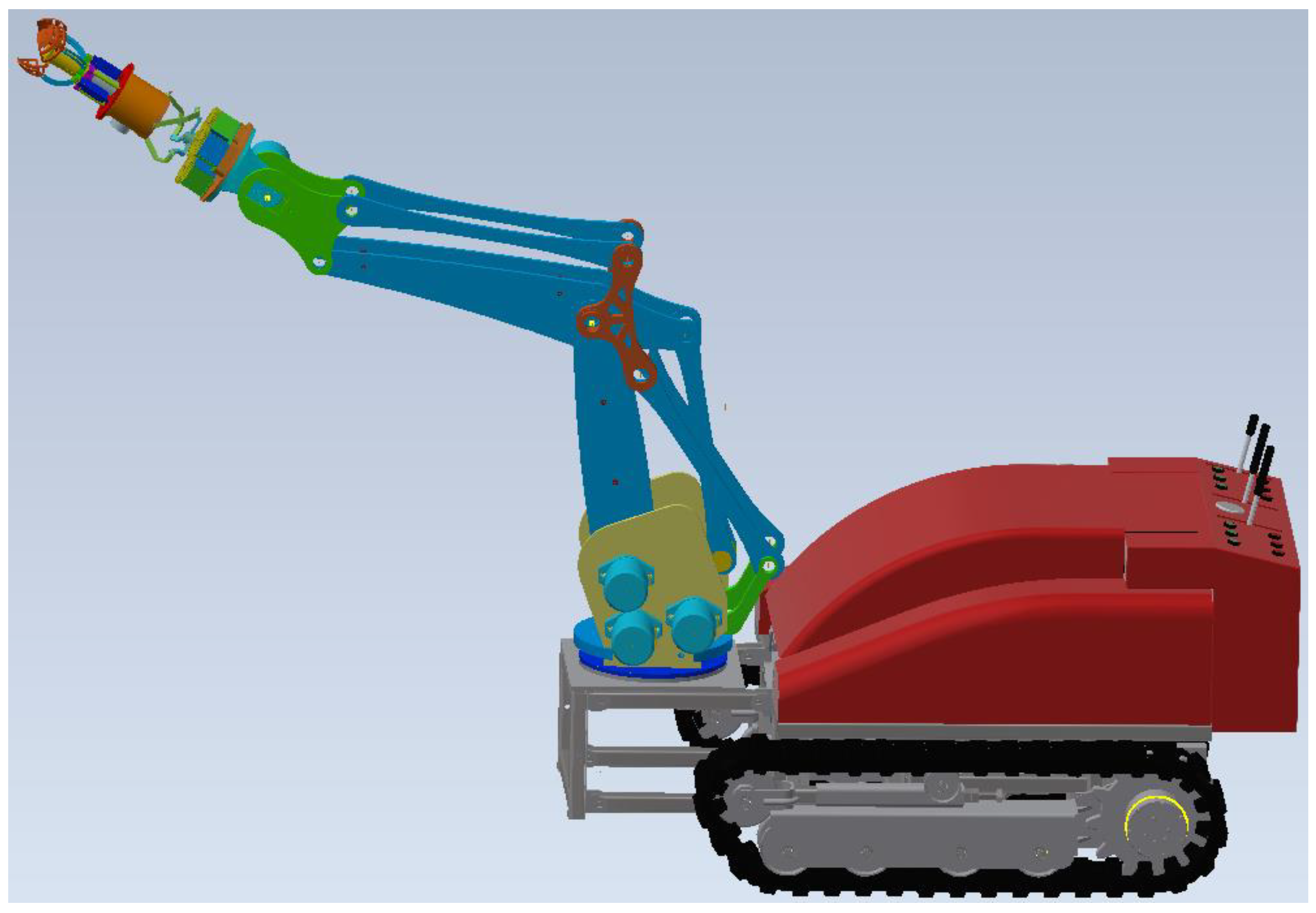
2. Structural Design of the Manipulator for Camellia Pollen Picking
- M—The number of degrees of freedom of the organization;
- d—The order of the mechanism; the space mechanism is of the 6th order;
- n—The total number of components in the mechanism, including the rack;
- g—The number of kinematic pairs in the organization;
- fi—The number of degrees of freedom of the i-th kinematic pair;
- υ—Redundant degrees of freedom of the mechanism;
- ζ—The number of local degrees of freedom.
3. Optimal Design of the Manipulator for Camellia Pollen Picking
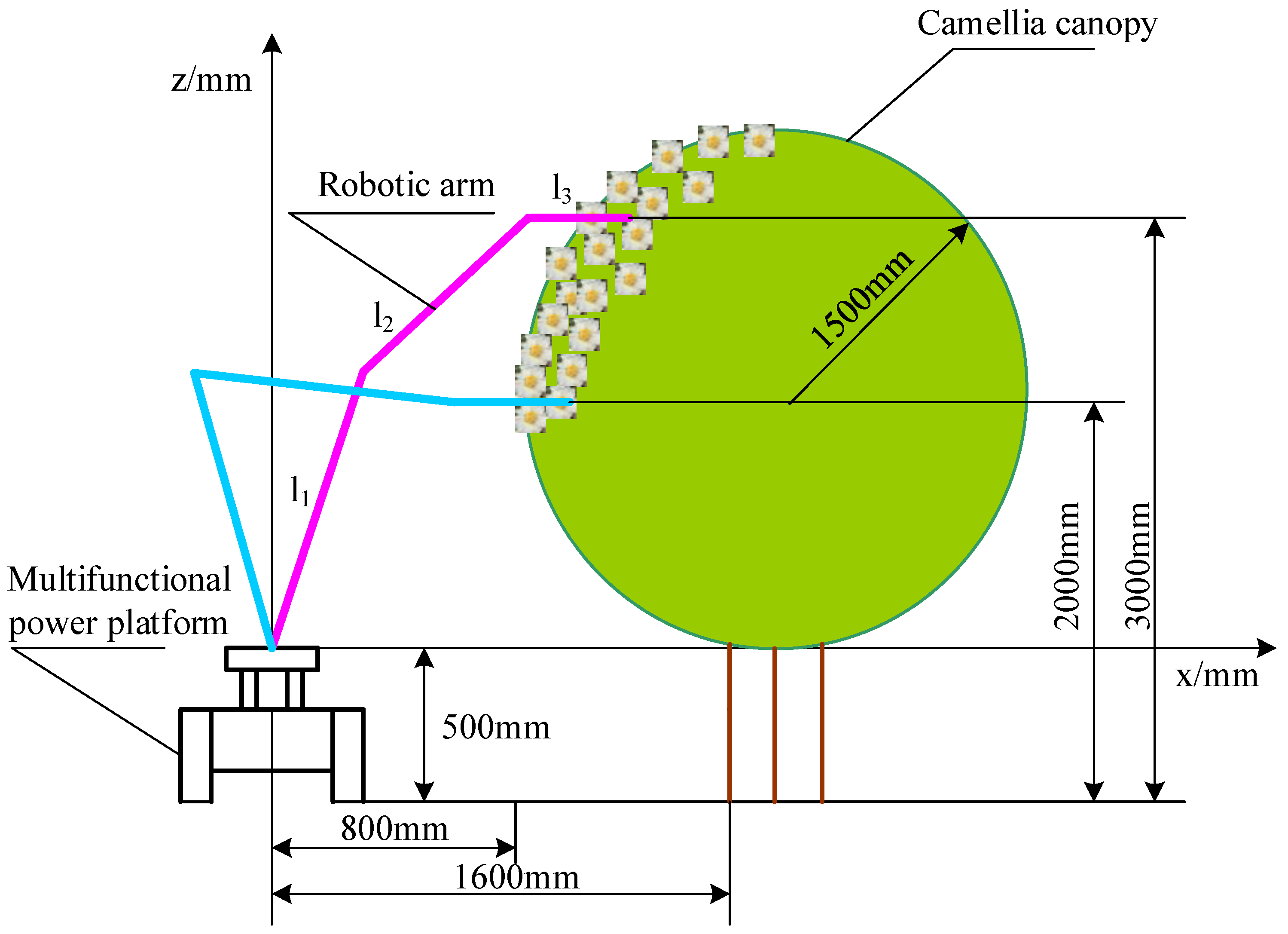
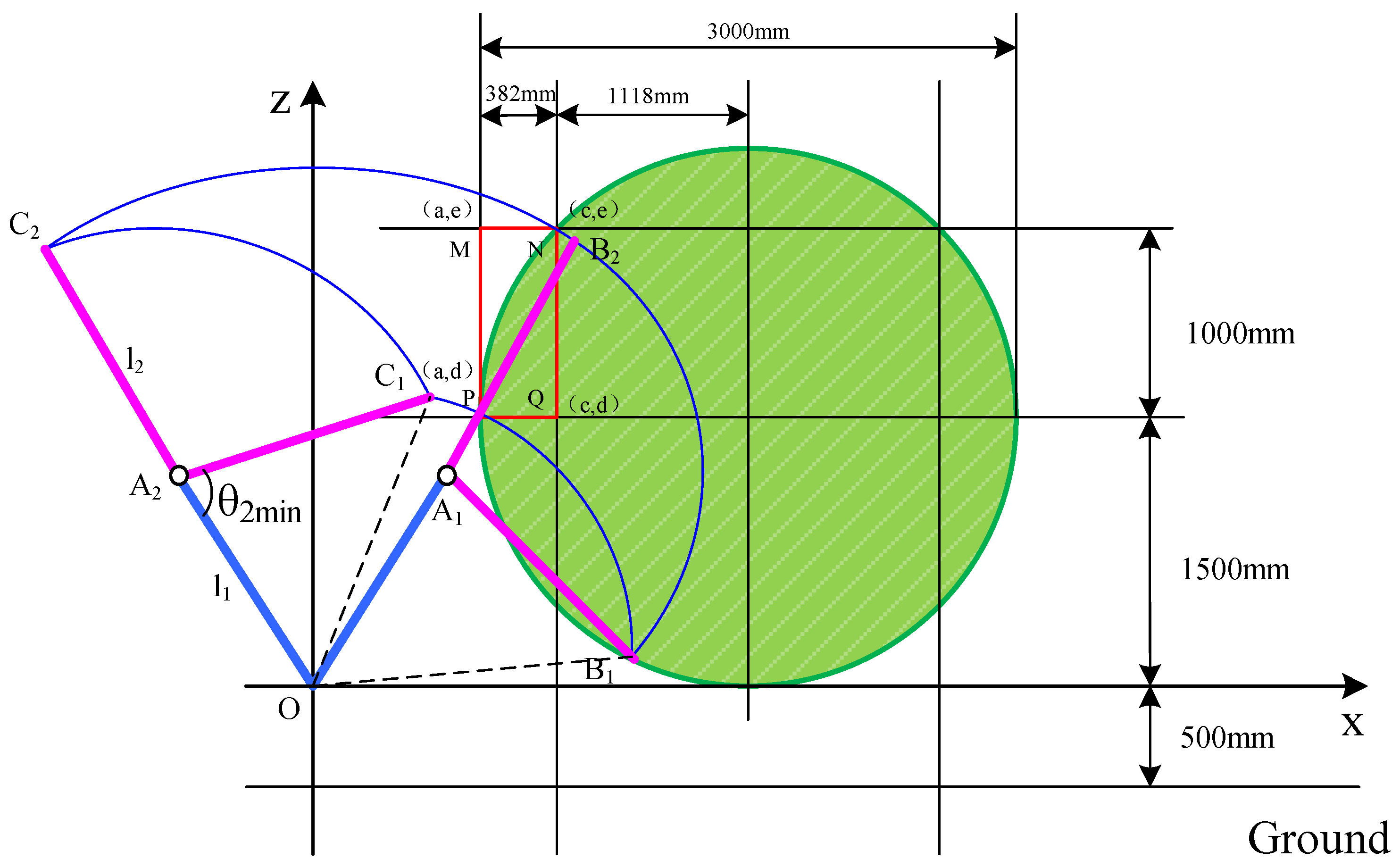
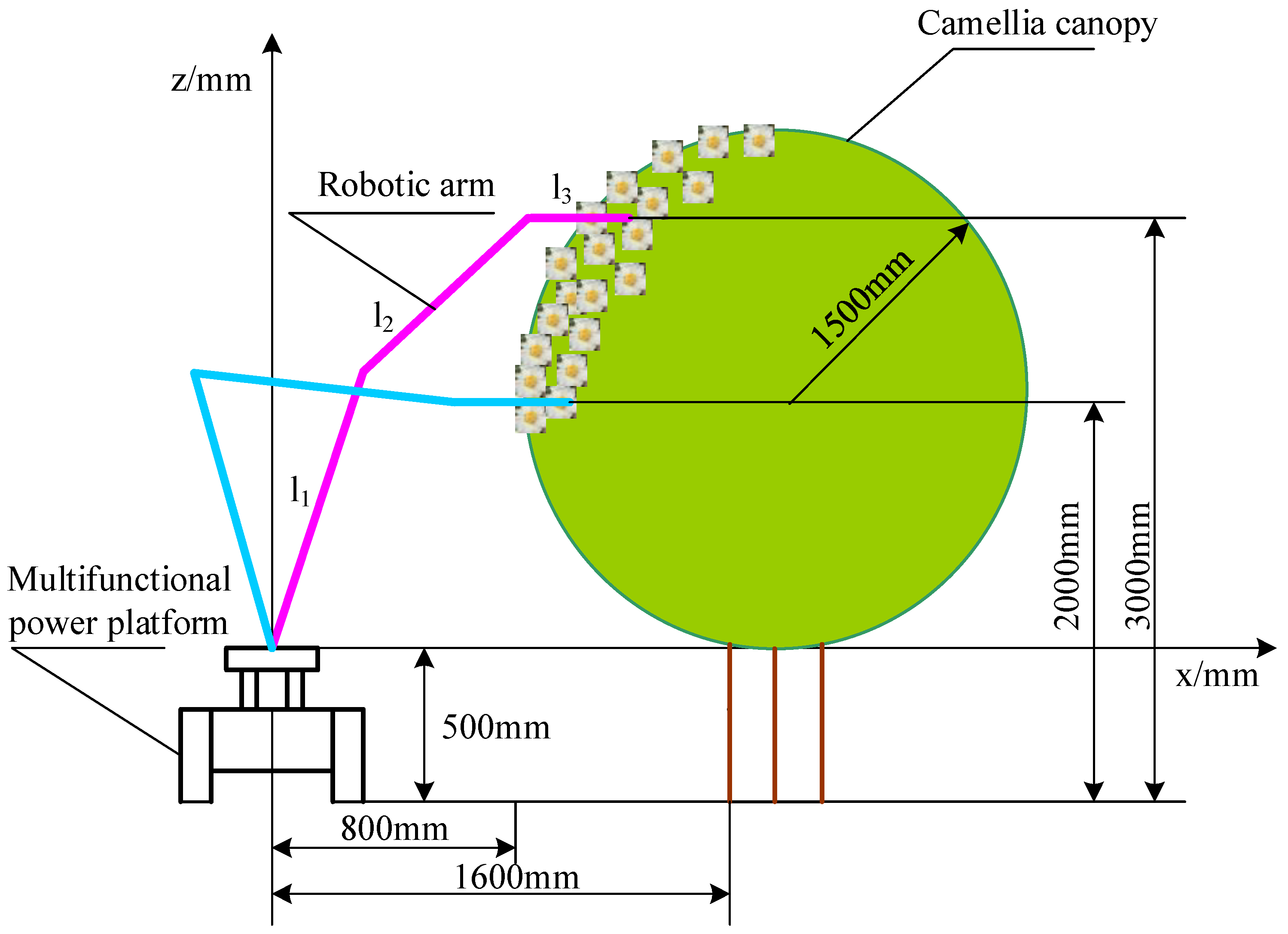
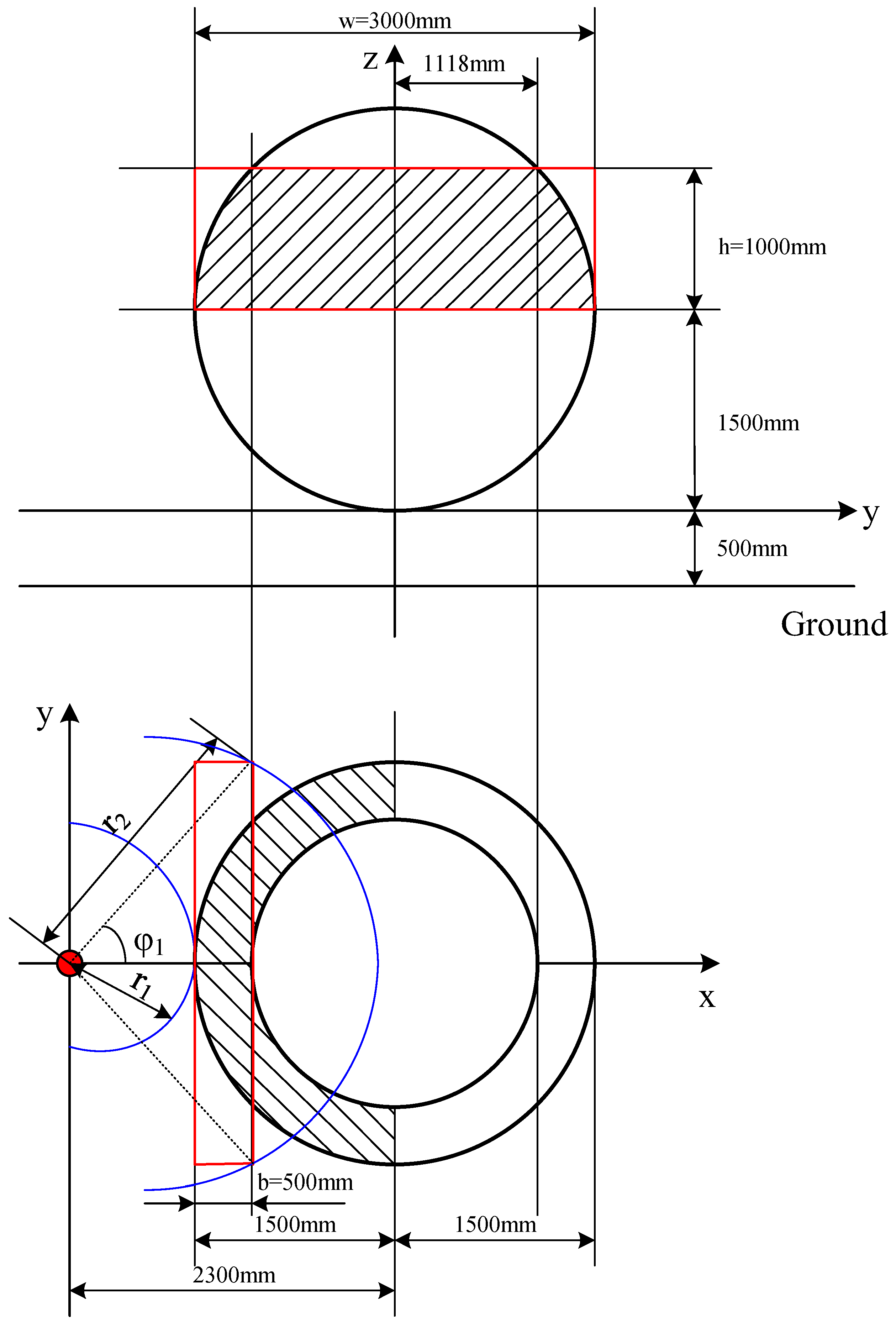
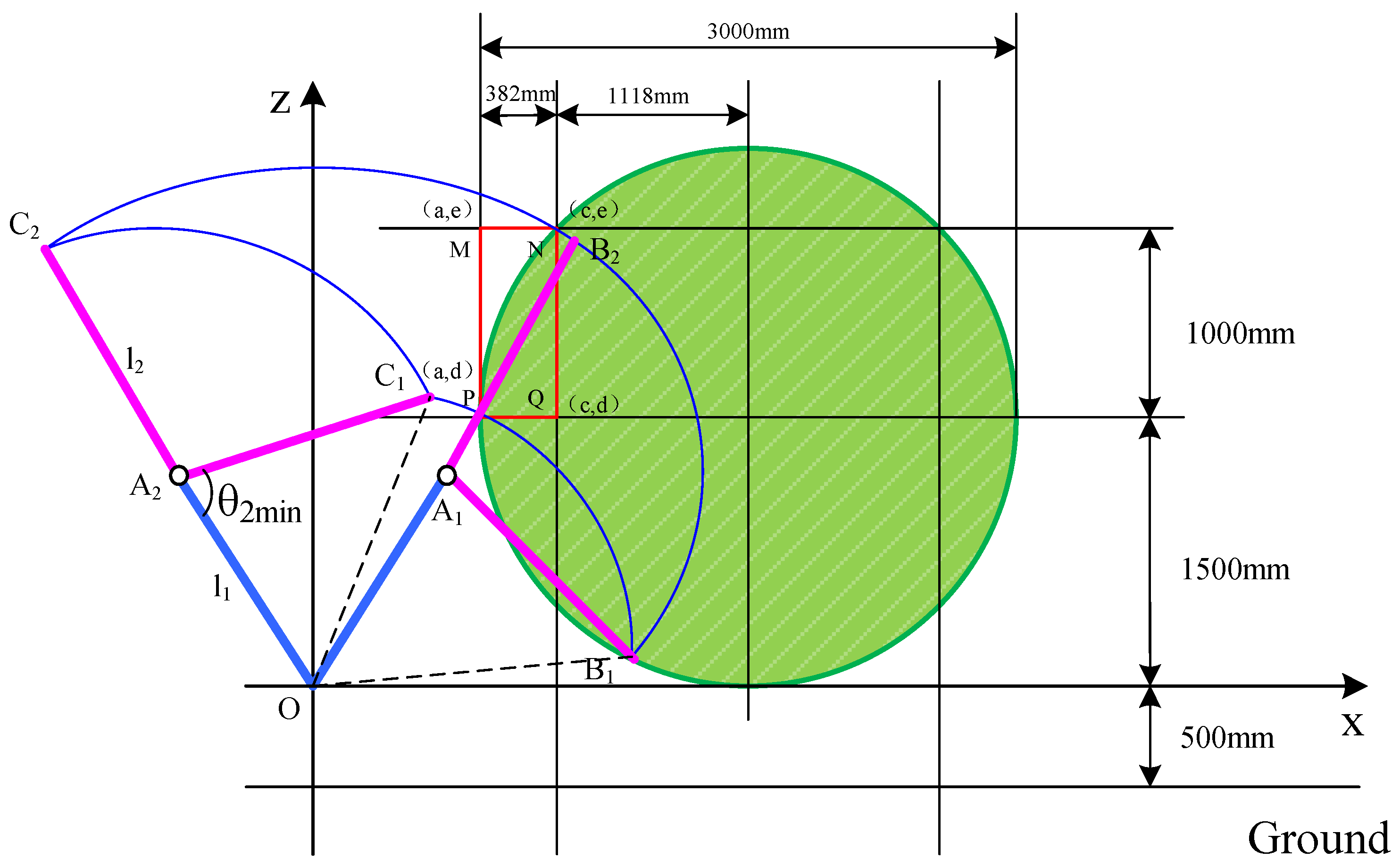
3.1. Simplified Processing of Picking Space
3.2. The Determination of the Optimal Design Variables
3.3. Determine the Objective Function
3.4. Determination of Constraints
- (1)
- (2)
- (3)
- (4)
3.5. Optimization Design of Structural Parameters
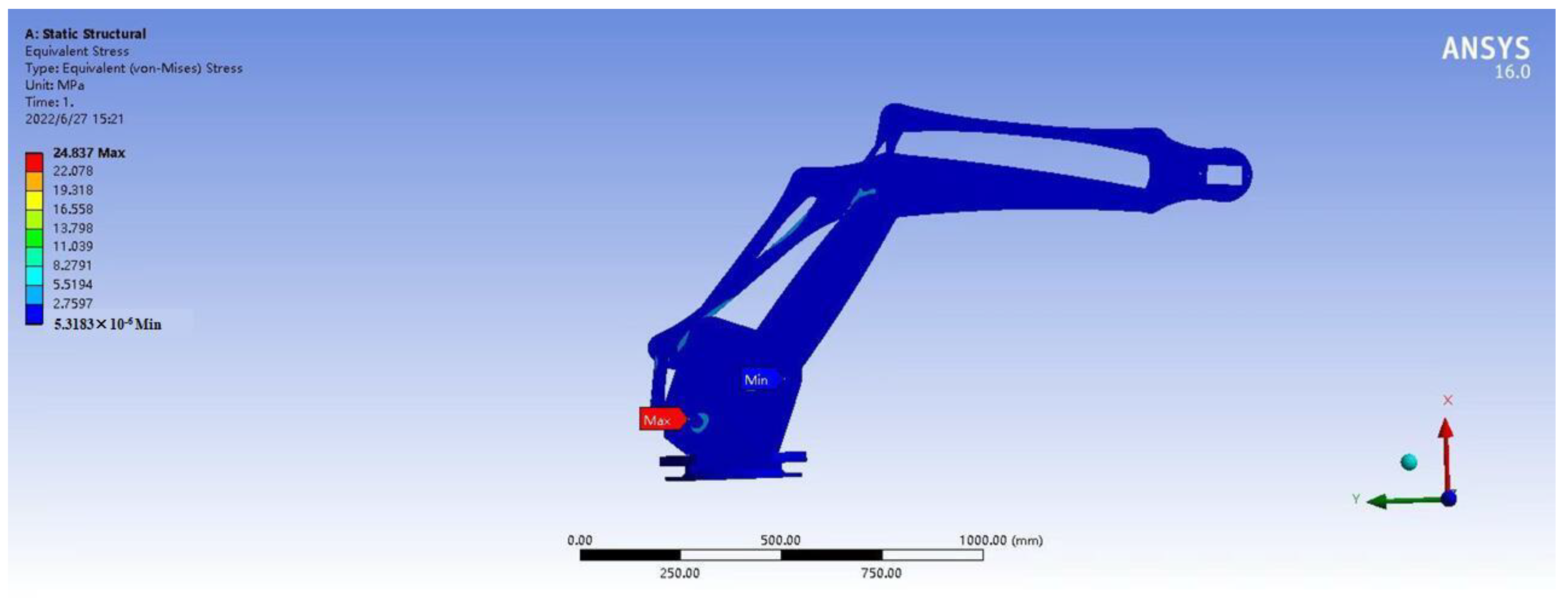
3.6. Structural Stability Analysis
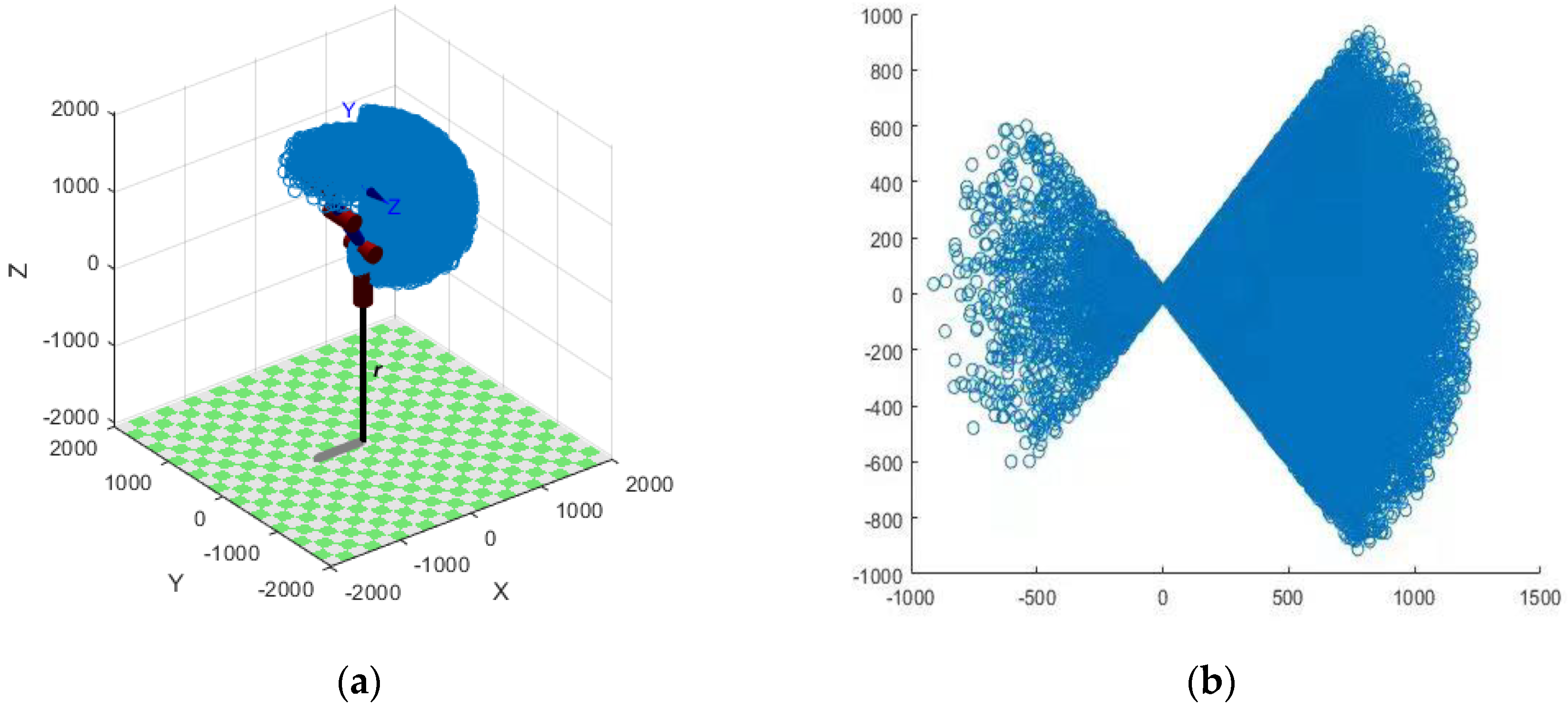
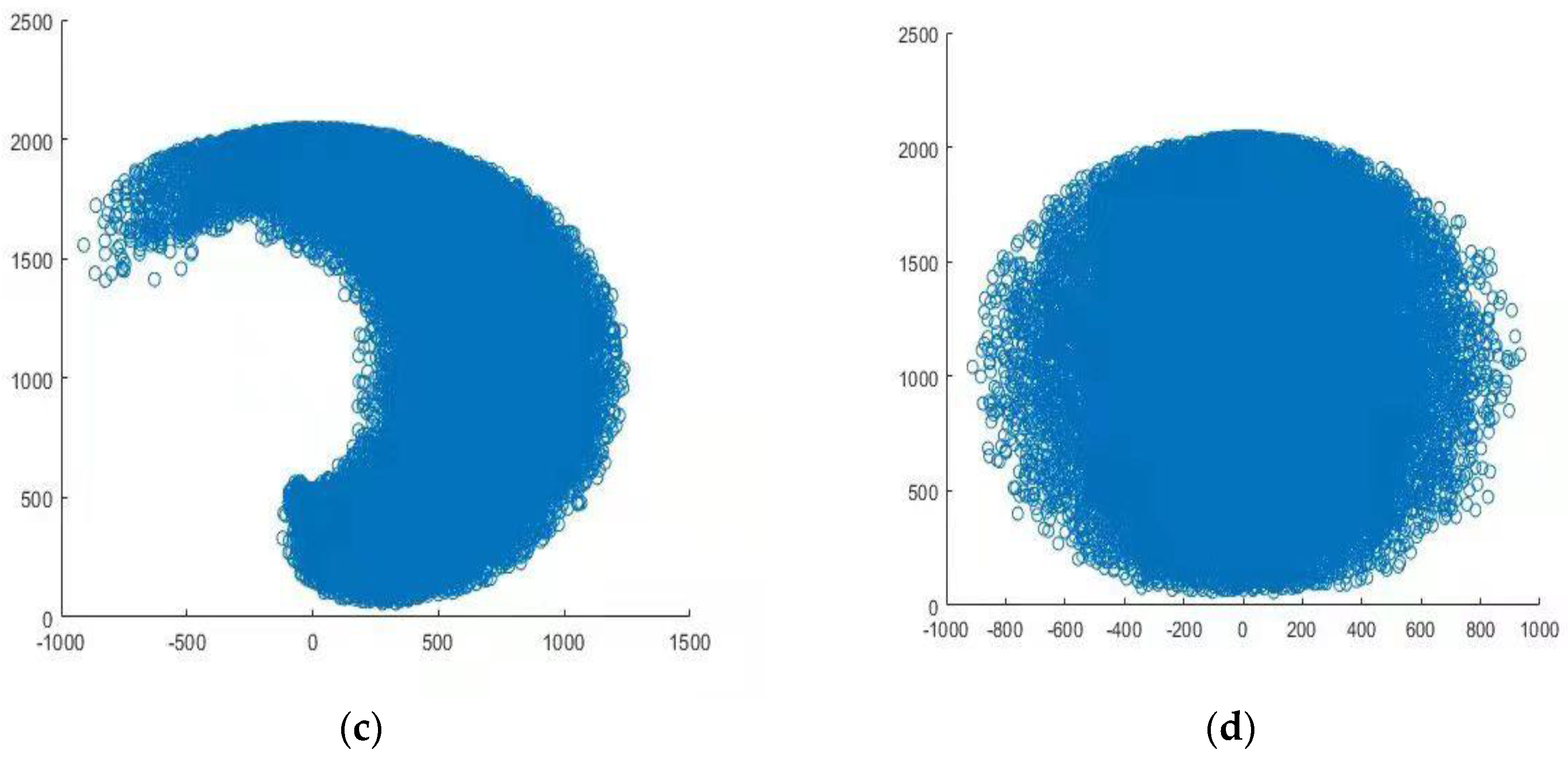
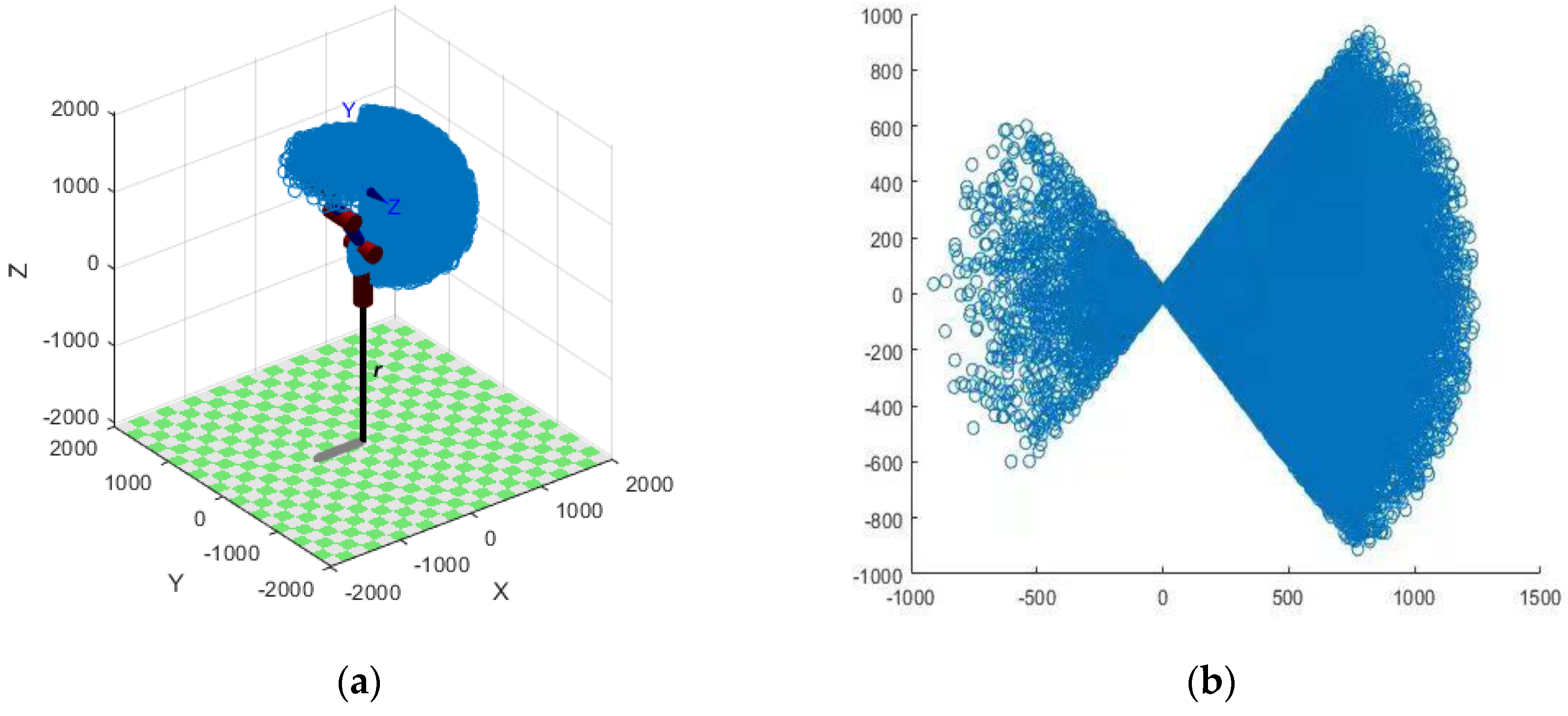
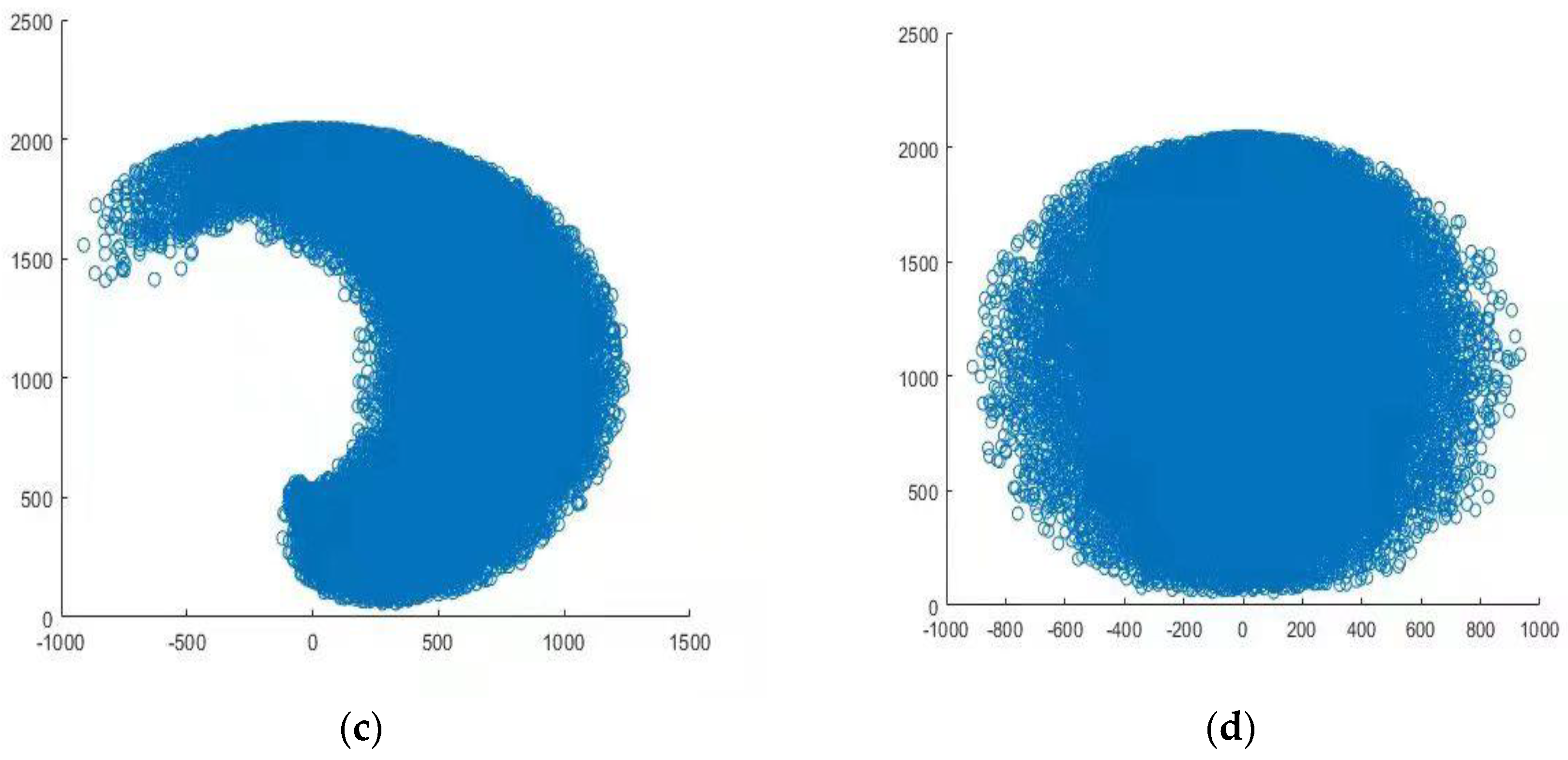
4. Manipulator Workspace Analysis and Simulation
5. Conclusions
- Considering the current situation of having no mechanized pollen-picking operation device, a four-degree-of-freedom pollen-picking manipulator has been developed. The manipulator is small, light, and compact. It is verified by a structural stability analysis that the cantilever structure has sufficient strength and bearing capacity.
- The tree canopy is simplified for pollen picking, and a general optimization method is proposed for the structural parameters of the manipulator for agricultural and forestry operations where the workspace is an arbitrary cube. The MATLAB optimization toolbox is used to optimize the structural parameters, and the optimization results can be used to process the prototype.
- To verify the rationality of the optimization method, motion-planning experiments were carried out. The results show that the reduced-scale model manipulator can reach eight extreme picking points and seven other arbitrary picking points in the target picking area of camellia pollen. The maximum errors in the x, y, and z directions are 5.1 mm, 5.7 mm, and 5.1 mm, respectively. The manipulator can meet the requirements of the camellia-pollen-picking operation; however, the positioning accuracy can be further improved and lay the foundation for the development of smart agriculture.
- The camellia-pollen-picking robot proposed in this paper can be further studied in the direction of multi-arm collaborative operation [28,29,30]. If the double-arm collaborative operation can be realized, it can shorten the time of picking a tree and improve the efficiency of pollen picking. If the four-arm collaborative operation can be realized, it may allow the pollen-picking operation of two adjacent camellia trees at the same time which may lead to agricultural robots developing rapidly like industrial robots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.K.; Chen, J.; Zhang, Z.H.; Pan, Y. Proteome Analysis of Tea Pollen(Camellia Sinensis ) under Different Storage Conditions. J. Agric. Food Chem. 2008, 56, 7535–7544. [Google Scholar] [CrossRef] [PubMed]
- Gao, C.; Yuan, D.; Yang, Y.; Wang, B.; Liu, D.; Zou, F. Pollen Tube Growth and Double Fertilization in Camellia Oleifera. J. Am. Soc. Hortic. Sci. 2015, 140, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Zou, F.; Tan, X.; Yuan, D.; Xie, P.; Yuan, J. A Study on Camellia Pollen Number and the Vitality Change under 4 °C Storage. Acta Agric. Univ. Jiangxiensis 2009, 31, 892–895. [Google Scholar]
- Zhang, P.; Yang, Y.; Xi, R.C.; Huang, R. Pollen Characteristics of Camellia gauchowensis Chang. For. Res. 2019, 32, 90–96. [Google Scholar]
- Guo, Y.; Bao, Y.; He, P.; Wang, H. Design and Experiment of Hand-push Lowbush Blueberry Picking Machine. Trans. Chin. Soc. Agric. Mach. 2012, 28, 40–45. [Google Scholar]
- Wang, Y.; Yang, Q.; Bao, G.; Xun, Y.; Zhang, L. Optimization Design and Experiment of Fruit and Vegetable Picking Manipulator. Trans. Chin. Soc. Agric. Mach. 2011, 42, 191–195. [Google Scholar]
- Van Henten, E.J.; Van’t Slot, D.A.; Hol, C.W.J.; van Willigenburg, L.G. Optimal Manipulator Design for A Cucumber Harvesting Robot. Comput. Electron. Agric. 2009, 65, 247–257. [Google Scholar] [CrossRef]
- Wu, Z.C.; Zhao, Q.; Li, L.J. Study on the design of three-claw linkage type camellia flower picking execution terminal. Chin. J. Constr. Mach. 2022, 20, 69–74, 80. [Google Scholar]
- Kondo, N.; Ting, K.C. Robotics for plant production. Artif. Intell. Rev. 1998, 12, 227–243. [Google Scholar] [CrossRef]
- Yang, W.L. Design and Analysis of Apple Harvesting Robot’s Manipulator; JiangSu University: Zhenjiang, China, 2009. [Google Scholar]
- Wang, L.L. Research on Key Technology of Tomato Havesting Robot; Beijing University of Technology: Beijing, China, 2018. [Google Scholar]
- Gao, Y.H. Research on Key Techniques of Strawberry Picking and Optimal Design of Manipulator; Shandong Agricultural University: Tai’an, China, 2021. [Google Scholar]
- Mao, L.R.; Wang, S.J.; Xue, T. Optimum design of 7-DOF heavy-duty manipulator based on ADAMS. Manuf. Autom. 2020, 42, 4–7. [Google Scholar]
- Luo, J.G.; He, M.Y. Research on the Configurations and Singularity of Serial-parallel Mechanism. Adv. Mater. Res. 2011, 393, 265–268. [Google Scholar] [CrossRef]
- Zhang, D.D.; Xu, Y.D.; Hou, Z.W.; Yao, J.; Zhao, Y. Optimal Design and Kinematic Analysis of 5-DOF Hybrid Serial-parallel Manipulator. Trans. Chin. Soc. Agric. Eng. 2016, 32, 69–76. [Google Scholar]
- Carp-Ciocardia, D.C. Dynamic Analysis of Clavel’s Delta Parallel Robot. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation 2003, Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Wang, Y.; Zhang, M.; Liu, B.; Liu, S.; He, Y.; Xu, H. Design and Experiment of Clamping Mechanism About End-effector for Citrus Harvesting Robot. J. Agric. Sci. Technol. 2019, 21, 61–69. [Google Scholar]
- Wang, Y.; Fu, S.; Zhang, Z.; Ma, J.; Xu, H. Design and Experimentation on End-effector of Citrus Picking Robot. J. Agric. Sci. Technol. 2018, 20, 69–77. [Google Scholar]
- Li, J.; Karkee, M.; Zhang, Q.; Xiao, K.; Feng, T. Characterizing Apple Picking Patterns for Robotic Harvesting. Comput. Electron. Agric. 2016, 127, 633–640. [Google Scholar] [CrossRef] [Green Version]
- Qin, X.; Shi, M.; Hou, Z.; Li, S.; Li, H.; Liu, H. Analysis of 3-DOF Cutting Stability of Titanium Alloy Helical Milling Based on PKM and Machining Quality Optimization. Machine 2022, 10, 404. [Google Scholar] [CrossRef]
- Law, M.; Ihlenfeldt, S.; Wabner, M.; Altintas, Y.; Neugebauer, R. Position-dependent Dynamics and Stability of Serial-parallel Kinematic Machines. CIRP Ann. 2013, 62, 375–378. [Google Scholar] [CrossRef]
- Song, Y.; Lian, B.; Sun, T.; Dong, G.; Qi, Y.; Gao, H. A Novel Five-Degree-of-Freedom Parallel Manipulator and Its Kinematic Optimization. J. Mech. Robot. 2014, 6, 041008. [Google Scholar] [CrossRef]
- Liu, J.Z.; Li, P.P.; Li, Z.G. Hardware Design of the End-effector for Tomato-harvesting Robot. Trans. Chin. Soc. Agric. Mach. 2008, 39, 109–112. [Google Scholar]
- Gasparetto, A.; Zanotto, V. A New Method for Smooth Trajectory Planning of Robot Manipulators. Mech. Mach. Theory 2007, 42, 455–471. [Google Scholar] [CrossRef]
- Yao, L.J.; Ding, W.M.; Chen, Y.L.; Zhao, S. Obstacle Avoidance Path Planning of Eggplant Harvesting Robot Manipulator. Trans. Chin. Soc. Agric. Mach. 2008, 39, 94–97. [Google Scholar]
- Zhang, D.S.; Xu, Y.D.; Yao, J.T.; Hu, B.; Zhao, Y. Kinematics, dynamics and stiffness analysis of a novel 3-DOF Kinematically/Actuation Redundant Planar Parallel Mechanism. Mech. Mach. Theory 2017, 116, 203–219. [Google Scholar] [CrossRef]
- Chai, S.P.; Yao, L.J.; Xu, L.J.; Chen, Q.; Xu, T.; Yang, Y. Research on Greenhouse Agricultural Machinery Path Tracking Based on Dynamic Look Ahead Distance Pure pursuit Model. J. Chin. Agric. Mech. 2021, 42, 58. [Google Scholar]
- Zhong, J.W. Vision Fusion Based Trajectory Planning and Control of Dual-Arm Collaborative Robot; Hangzhou Dianzi University: Hangzhou, China, 2021. [Google Scholar]
- Buhl, J.F.; Grønhøj, R.; Jørgensen, J.K.; Mateus, G.; Pinto, D.; Sørensen, J.K.; Bøgh, S.; Chrysostomou, D. A Dual-arm Collaborative Robot System for The Smart Factories of The Future. Procedia Manuf. 2019, 38, 333–340. [Google Scholar] [CrossRef]
- Quan, L.Z.; Zhang, D.D.; Zha, S.H.; Xi, D.; Wang, H. Kinematics Analysis and Experiment of Multifunctional Agricultural Robot in Greenhouse with Three Arms. Trans. Chin. Soc. Agric. Eng. 2015, 31, 32–38. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Multi-functional power platform length | L | 1354 mm |
| Multi-functional power platform width | B | 900 mm |
| Multi-functional power platform height | H | 816 mm |
| The height of the bench for installing the manipulator | H1 | 500 mm |
| The big arm length of the manipulator | ? | |
| Forearm length of the manipulator | ? | |
| End effector length of the manipulator | 318 mm | |
| The big arm rotation angle | [−50°, 50°] | |
| The big arm pitch angle | [60°, 120°] | |
| Forearm pitch angle | [θ2min, 180°] | |
| End effector pitch angle | 360° − (θ1 + θ2) |
| Number | Theoretical Value | Measured Value | Absolute Value of Error | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Px | Py | Pz | Px’ | Py’ | Pz’ | Ex | Ey | Ez | |
| 1 | 950 | 725 | 340 | 954.4 | 730.1 | 344.8 | 4.4 | 5.1 | 4.8 |
| 2 | 950 | 725 | 1700 | 947.3 | 721.5 | 1695.4 | 2.7 | 3.5 | 4.6 |
| 3 | 950 | −720 | 1700 | 946.2 | −724.3 | 1704..3 | 3.8 | 4.3 | 4.3 |
| 4 | 950 | −720 | 340 | 945.8 | −723.8 | 344.6 | 4.2 | 3.8 | 4.6 |
| 5 | 320 | 725 | 340 | 316.2 | 722.6 | 336.5 | 3.8 | 2.4 | 3.5 |
| 6 | 320 | 725 | 1700 | 317.5 | 729.4 | 1705.1 | 2.5 | 4.4 | 5.1 |
| 7 | 320 | −720 | 1700 | 322.8 | −717.4 | 1695.1 | 2.8 | 2.6 | 4.9 |
| 8 | 320 | −720 | 340 | 325.1 | −724.9 | 343.5 | 5.1 | 4.9 | 3.5 |
| 9 | 400 | −600 | 400 | 403.5 | −604.6 | 403.5 | 3.5 | 4.6 | 3.5 |
| 10 | 480 | −300 | 650 | 483.7 | −294.3 | 647.1 | 3.7 | 5.7 | 2.9 |
| 11 | 640 | −200 | 900 | 636.8 | −202.9 | 895.4 | 4.6 | 2.9 | 4.6 |
| 12 | 650 | 240 | 1040 | 654.1 | 243.5 | 1044.9 | 4.1 | 2.9 | 4.9 |
| 13 | 680 | 300 | 1300 | 678.1 | 302.5 | 1304.2 | 1.9 | 2.5 | 4.2 |
| 14 | 700 | 340 | 1530 | 704.6 | 344.2 | 1526.3 | 3.5 | 4.2 | 3.7 |
| 15 | 750 | 600 | 1650 | 746.4 | 604.6 | 1646.5 | 3.6 | 4.6 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Q.; Li, L.; Wu, Z.; Guo, X.; Li, J. Optimal Design and Experiment of Manipulator for Camellia Pollen Picking. Appl. Sci. 2022, 12, 8011. https://doi.org/10.3390/app12168011
Zhao Q, Li L, Wu Z, Guo X, Li J. Optimal Design and Experiment of Manipulator for Camellia Pollen Picking. Applied Sciences. 2022; 12(16):8011. https://doi.org/10.3390/app12168011
Chicago/Turabian StyleZhao, Qing, Lijun Li, Zechao Wu, Xin Guo, and Jun Li. 2022. "Optimal Design and Experiment of Manipulator for Camellia Pollen Picking" Applied Sciences 12, no. 16: 8011. https://doi.org/10.3390/app12168011
APA StyleZhao, Q., Li, L., Wu, Z., Guo, X., & Li, J. (2022). Optimal Design and Experiment of Manipulator for Camellia Pollen Picking. Applied Sciences, 12(16), 8011. https://doi.org/10.3390/app12168011