
Seven-Phase PMSM Drives Operation Post Two Types of Faults


Abstract
:1. Introduction
2. Operation of the Seven-Phase Drive Post the Speed Sensor Failure
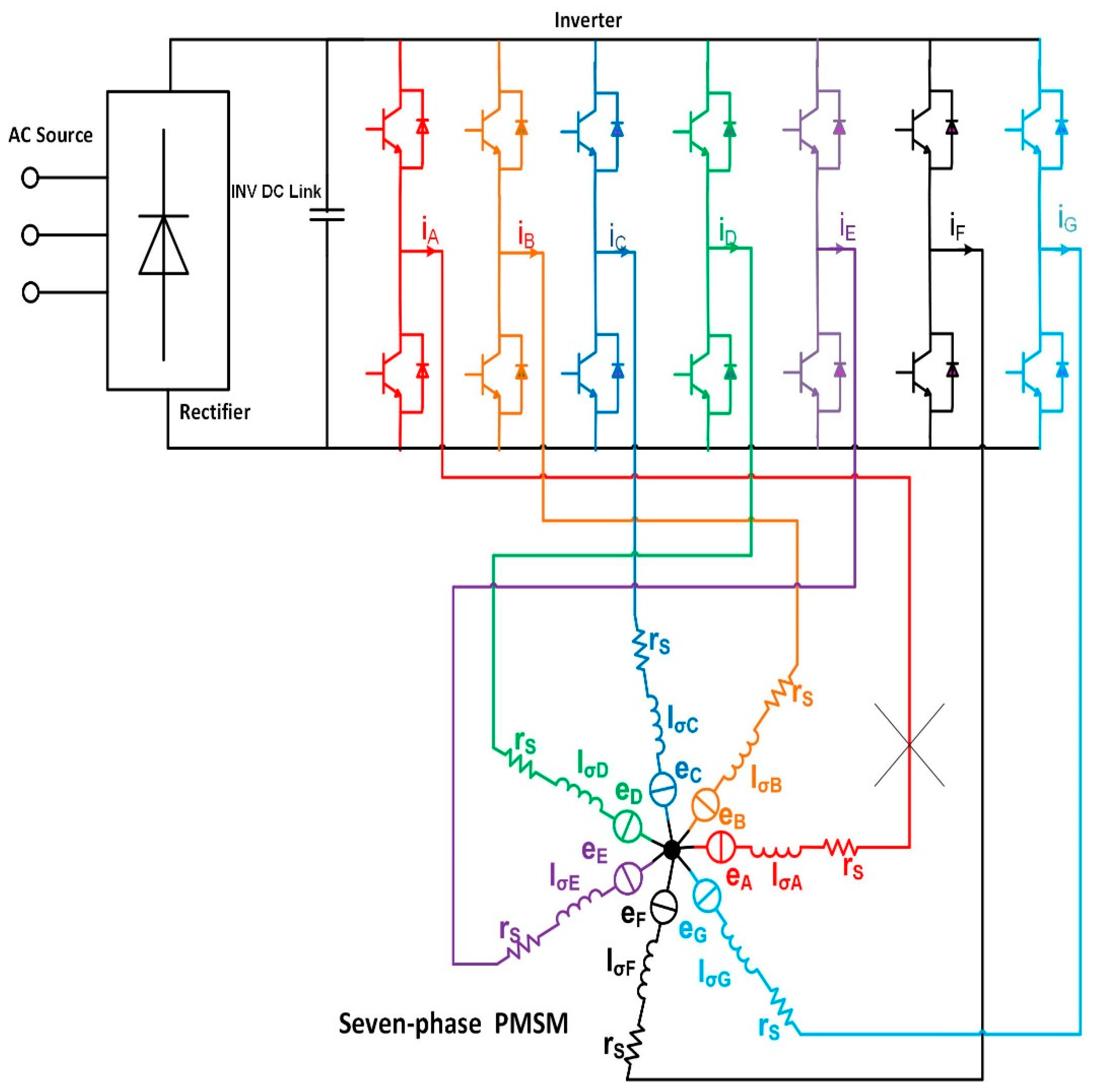
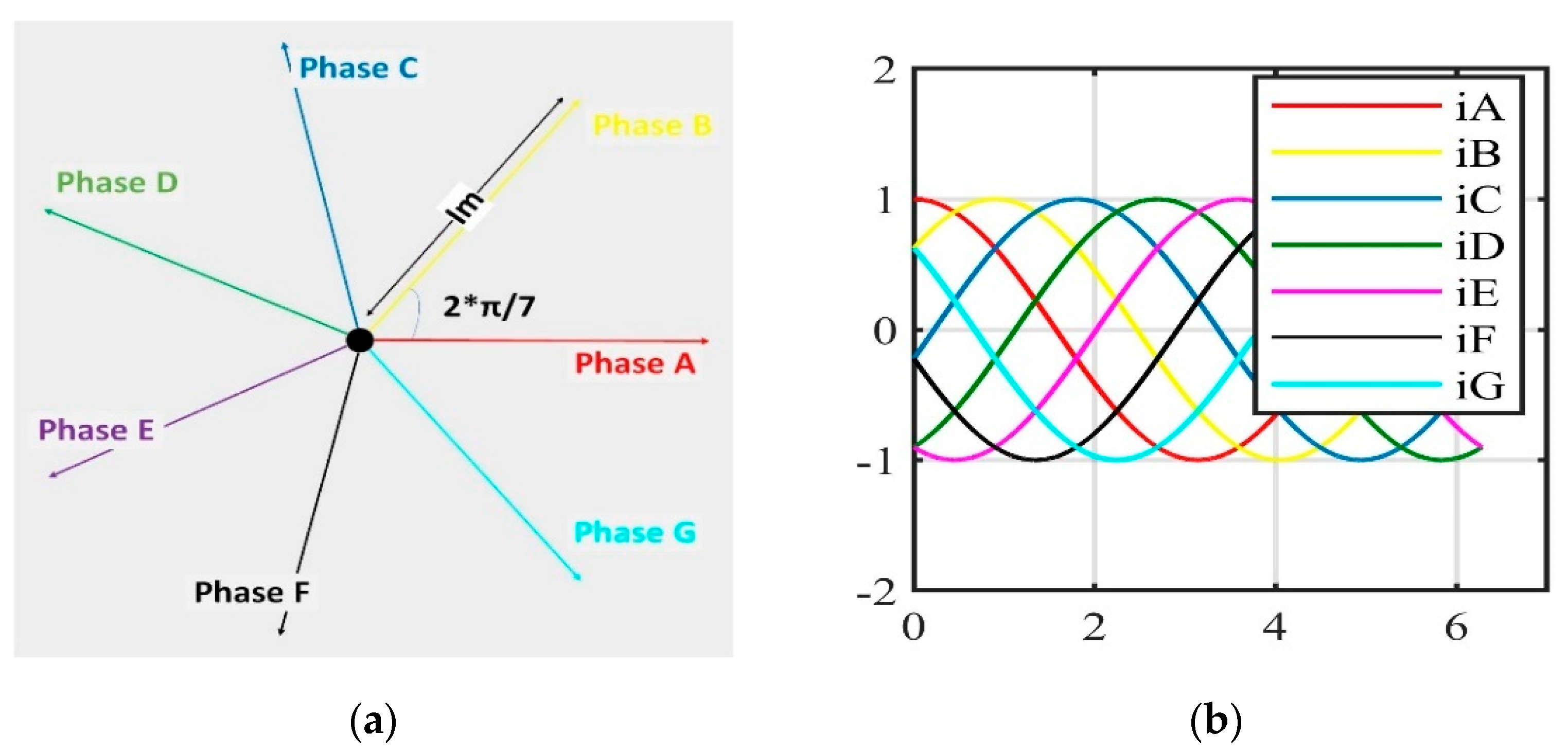
2.1. Seven-Phase PMSM Model
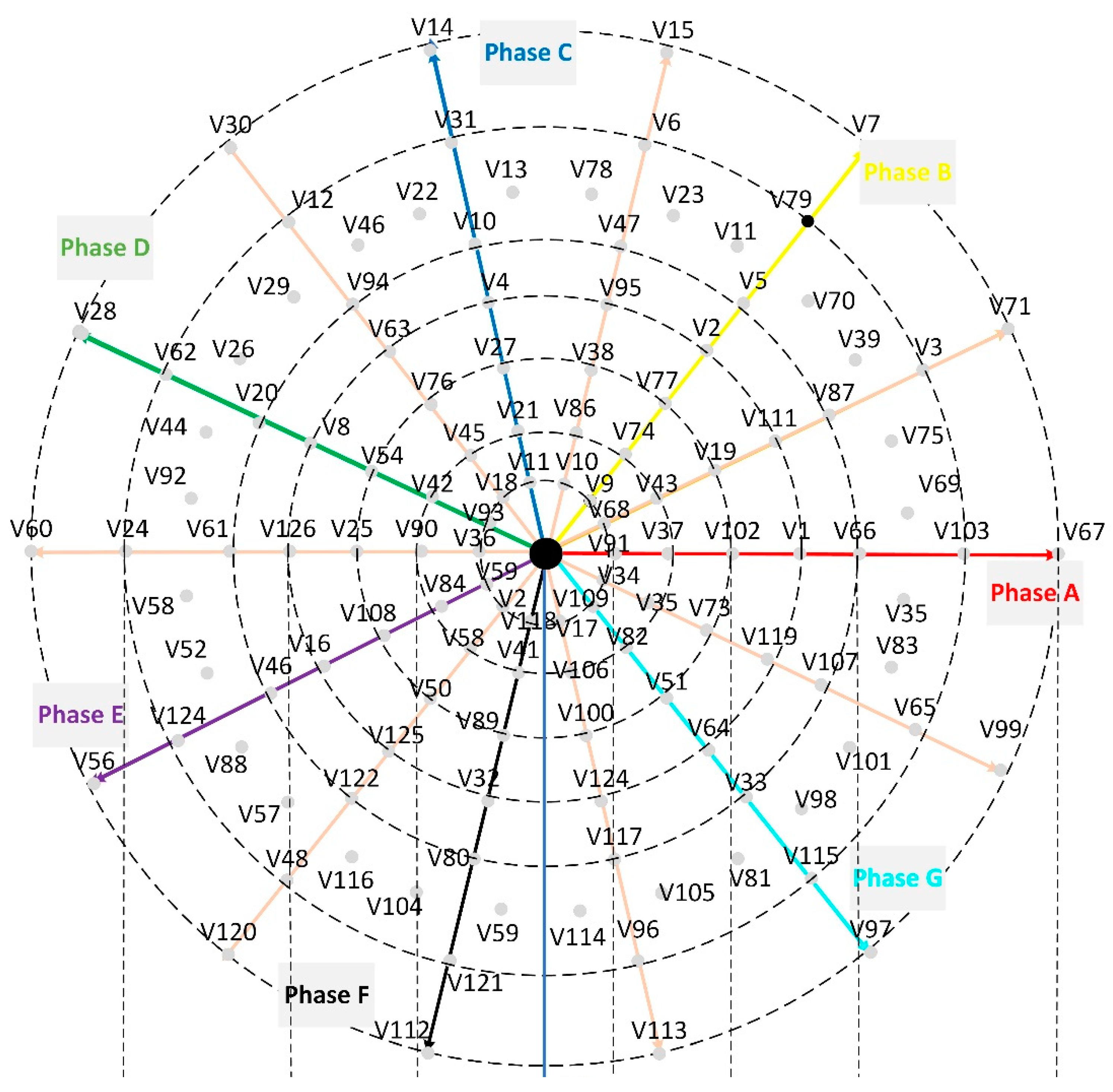
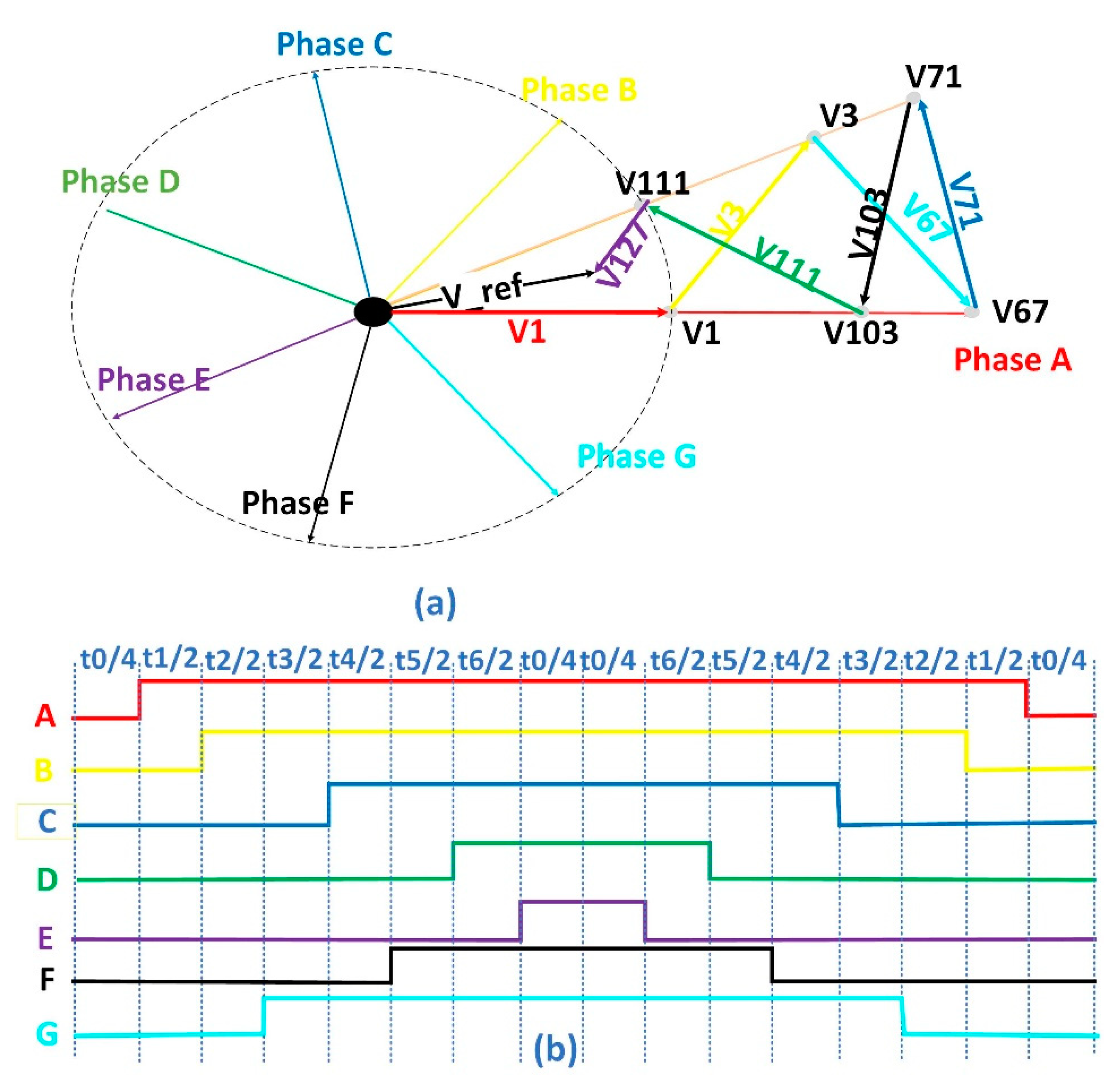
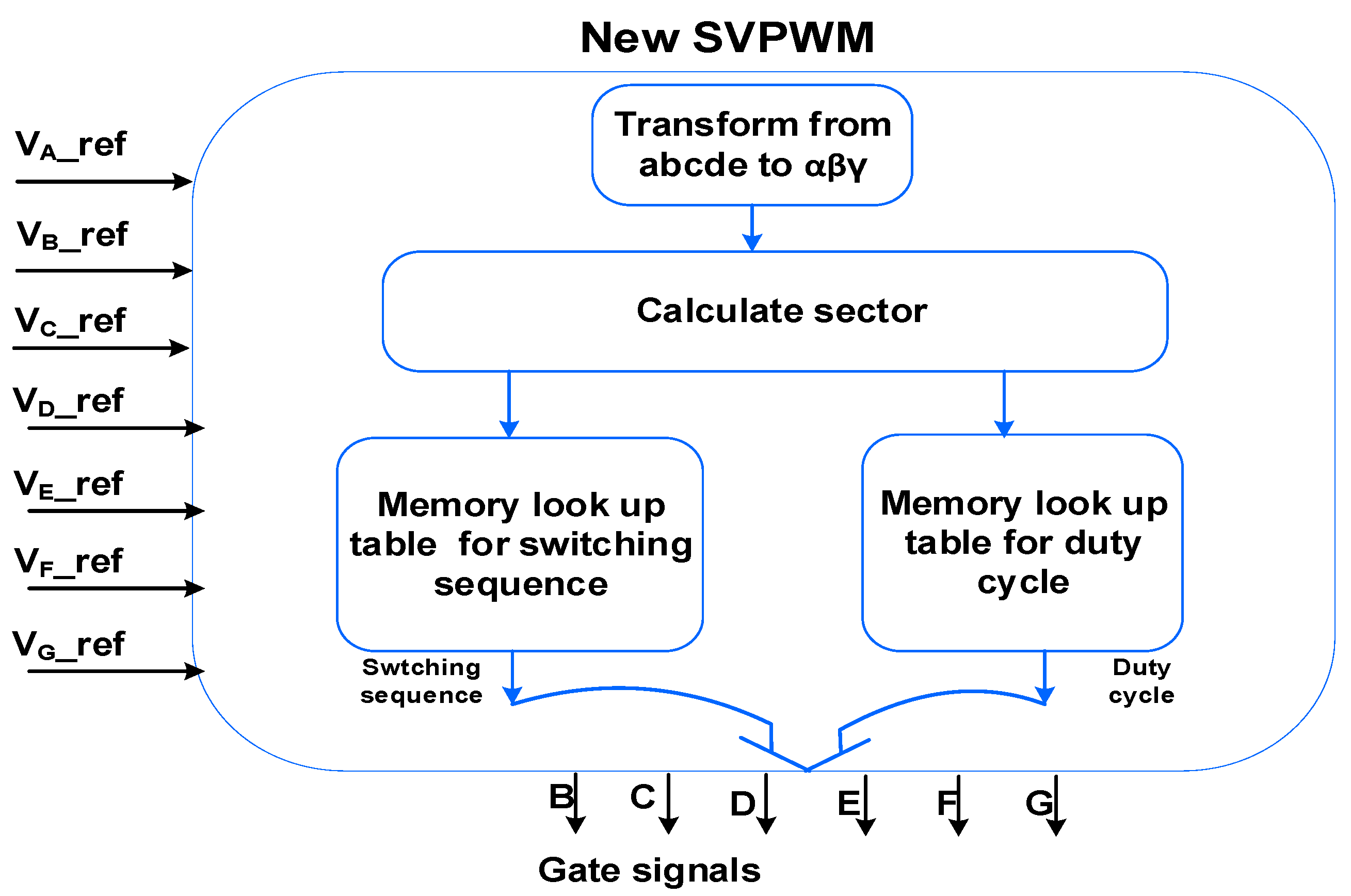
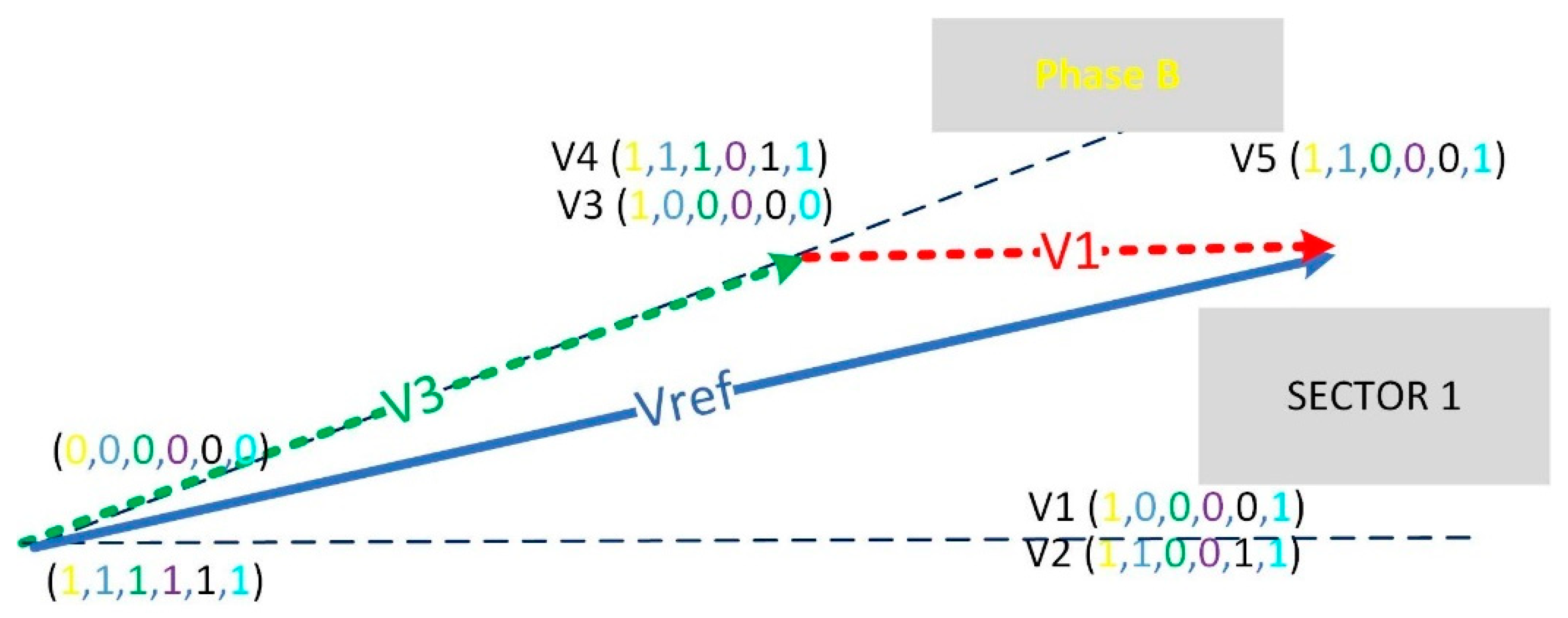
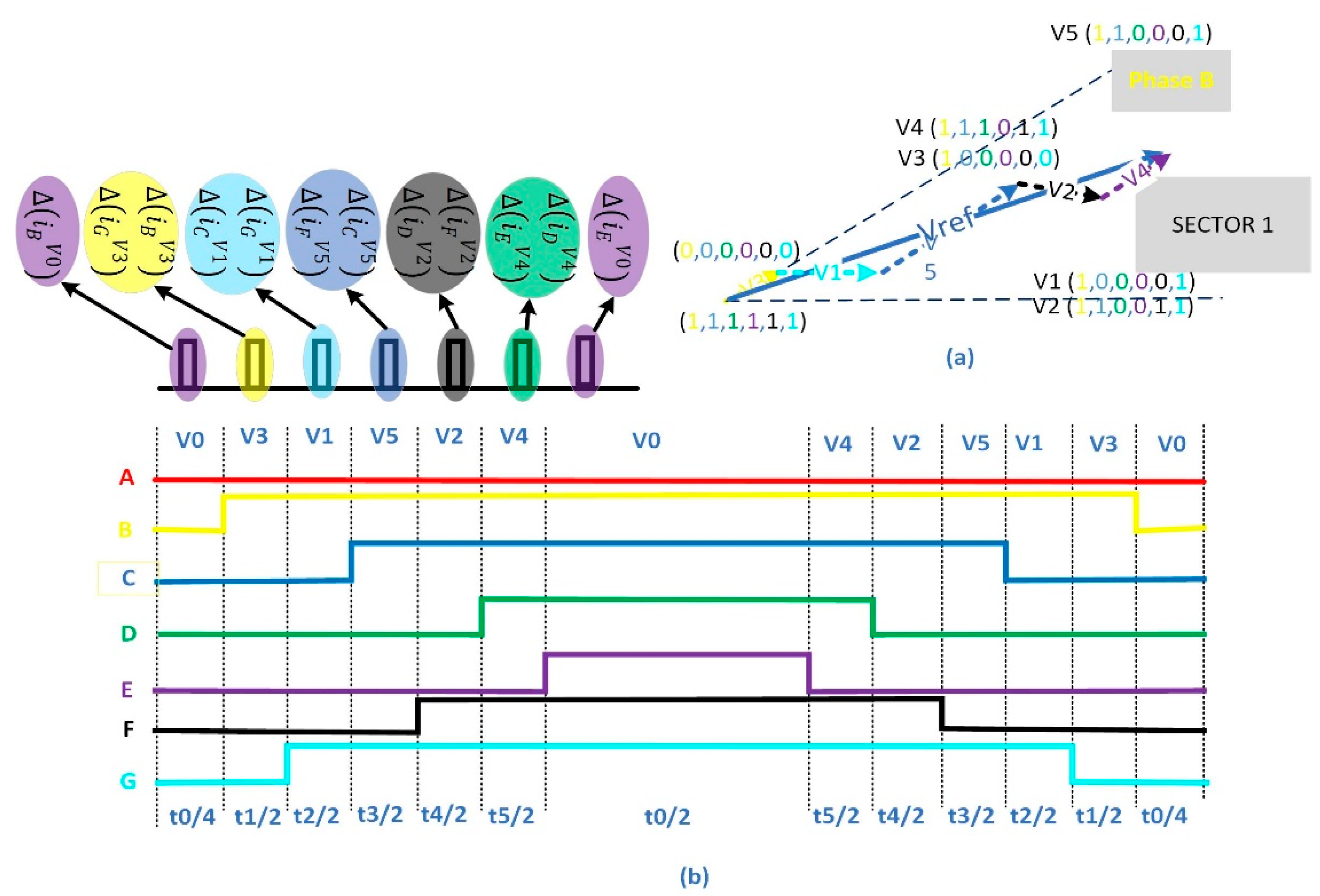
2.2. NSV-SVPWM
2.3. Algorithms to Extract the Rotor Position in Seven-Phase PMSMs
3. Operation of the Seven-Phase Drive after Losing Phase ‘A’
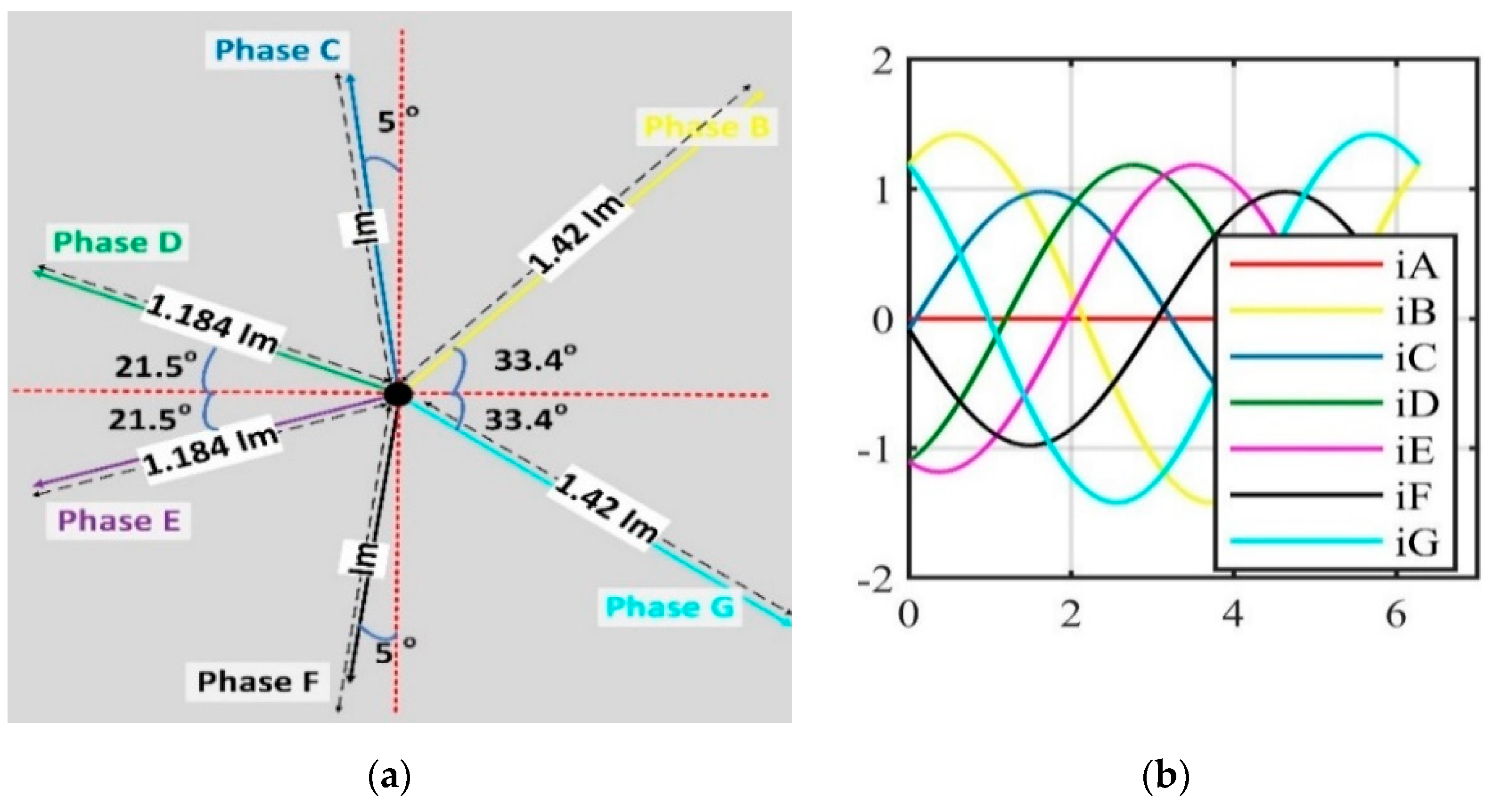
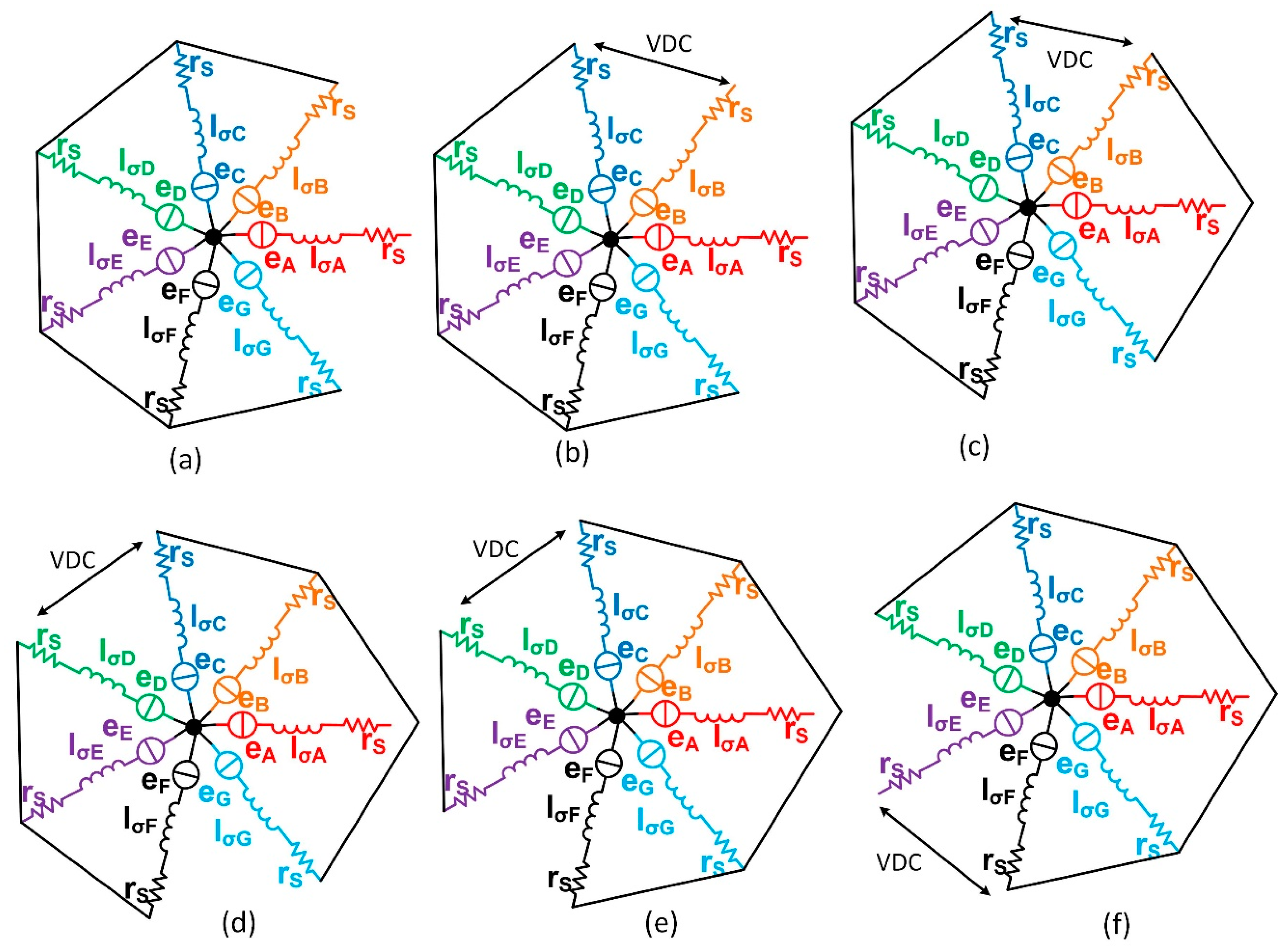
3.1. The Stator Current Distribution in the Seven-Phase PMSMs after Losing Phase ‘A’
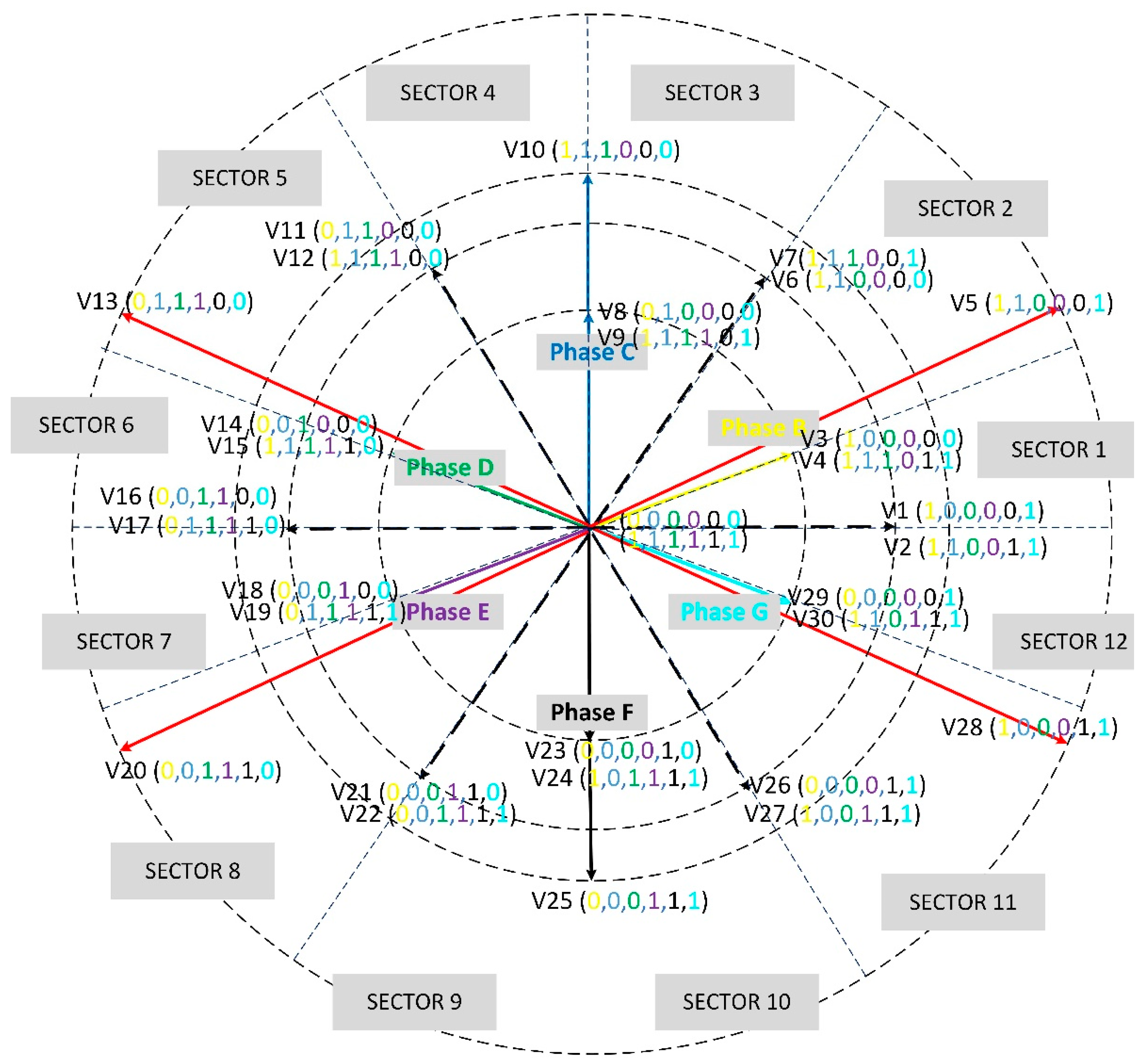
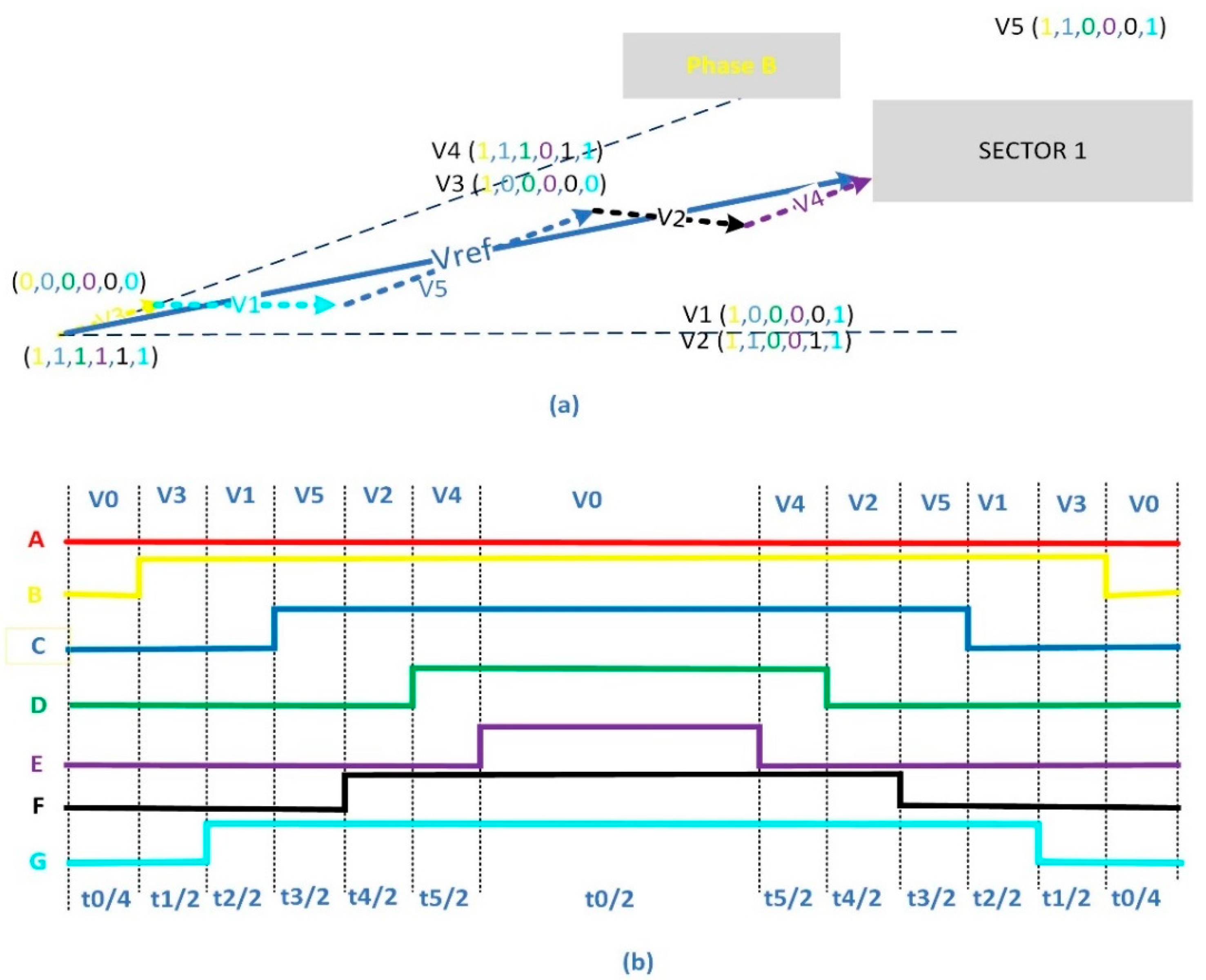
3.2. SVPWM Techniques after Losing Phase ‘A’
3.3. Simulation Results of the Speed Control of the Seven-Phase Drive after Losing Phase ‘A’
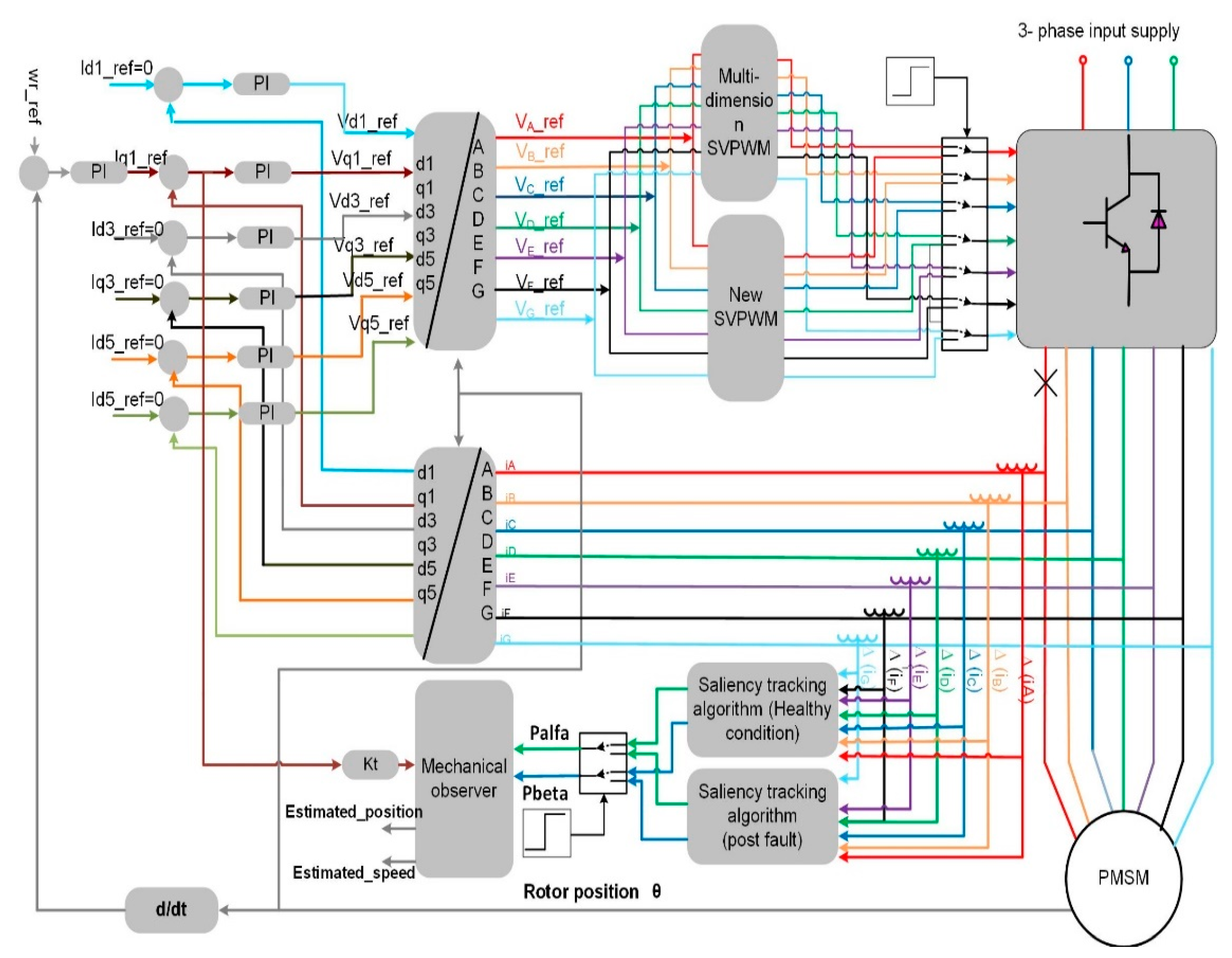
4. Saliency Position Tracking in the Seven-Phase Motor Post the Fault
4.1. Saliecy-Tracking Algorithm Post the Failure
4.2. Simulation Results of the Saliecy-Tracking Algorithm after Losing Phase ‘A’
5. Simulation Results of the Seven-Phase Drive after Losing Phase ‘A’ and the Speed Sensor
6. Conclusions
Funding
Conflicts of Interest
Appendix A
References
- Villani, M.; Tursini, M.; Fabri, G.; Castellini, L. Multi-phase fault tolerant drives for aircraft applications. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion conference, Bologna, Italy, 19–21 October 2010; pp. 1–6. [Google Scholar]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Subotic, I.; Bodo, N.; Levi, E.; Jones, M. Onboard Integrated Battery Charger for EVs Using an Asymmetrical Nine-Phase Machine. IEEE Trans. Ind. Electron. 2015, 62, 3285–3295. [Google Scholar] [CrossRef]
- Yepes, A.G.; Lopez, O.; Gonzalez-Prieto, I.; Duran, M.J.; Doval-Gandoy, J. A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 1: General Overview Considering Multiple Fault Types. Machines 2022, 10, 208. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Elgenedy, M.A.; Ahmed, S.; Massoud, A.M. An Improved Fault Tolerant Five-Phase Induction Machine Using A Combined Star/Pentagon Single Layer Stator Winding Connection. IEEE Trans. Ind. Electron. 2015, 63, 618–628. [Google Scholar] [CrossRef]
- Yepes, A.G.; Gonzalez-Prieto, I.; Lopez, O.; Duran, M.J.; Doval-Gandoy, J. A Comprehensive Survey on Fault Tolerance in Multiphase AC Drives, Part 2: Phase and Switch Open-Circuit Faults. Machines 2022, 10, 221. [Google Scholar] [CrossRef]
- Iftikhar, M.H.; Park, B.-G.; Kim, J.-W. Design and Analysis of a Five-Phase Permanent-Magnet Synchronous Motor for Fault-Tolerant Drive. Energies 2021, 14, 514. [Google Scholar] [CrossRef]
- Huang, X.; Goodman, A.; Gerada, C.; Fang, Y.; Lu, Q. Design of a Five-Phase Brushless DC Motor for a Safety Critical Aerospace Application. IEEE Trans. Ind. Electron. 2012, 59, 3532–3541. [Google Scholar] [CrossRef]
- Shao, L.; Hua, W.; Dai, N.; Shao, L. Mathematical Modeling of a 12-Phase Machine for Wind Power Generation. IEEE Trans. Ind. Electron. 2016, 63, 504–516. [Google Scholar] [CrossRef]
- Pantea, A.; Yazidi, A.; Betin, F.; Taherzadeh, M.; Carrière, S.; Henao, H.; Capolino, G.A. Six-Phase Induction Machine Model for Electrical Fault Simulation Using the Circuit-Oriented Method. IEEE Trans. Ind. Electron. 2016, 63, 494–503. [Google Scholar] [CrossRef]
- Che, H.S.; Duran, M.J.; Levi, E.; Jones, M.; Hew, W.; Rahim, N.A. Postfault Operation of an Asymmetrical Six-Phase Induction Machine With Single and Two Isolated Neutral Points. IEEE Trans. Power Electron. 2014, 29, 5406–5416. [Google Scholar] [CrossRef] [Green Version]
- Che, H.S.; Levi, E.; Jones, M.; Hew, W.; Rahim, N.A. Current Control Methods for an Asymmetrical Six-Phase Induction Motor Drive. IEEE Trans. Power Electron. Trans. Power Electron. 2014, 29, 407–417. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Prieto, I.; Duran, M.J.; Che, H.S.; Levi, E.; Bermúdez, M.; Barrero, F. Fault-Tolerant Operation of Six-Phase Energy Conversion Systems With Parallel Machine-Side Converters. IEEE Trans. Power Electron. 2016, 31, 3068–3079. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Houari, A.; Machmoum, M.; Benkhoris, M.F.; Tang, T. An active FTC strategy using generalized proportional integral observers applied to five-phase PMSG based tidal current energy conversion systems. Energies 2020, 13, 6645. [Google Scholar] [CrossRef]
- Jinquan, X.; Boyi, Z.; Hao, F.; Hong, G. Guaranteeing the fault transient performance of aerospace multiphase permanent magnet motor system: An adaptive robust speed control approach. CES Trans. Electr. Mach. Syst. 2020, 4, 114–122. [Google Scholar]
- Mossa, M.A.; Echeikh, H.; Diab, A.A.Z.; Haes Alhelou, H.; Siano, P. Comparative Study of Hysteresis Controller, Resonant Controller and Direct Torque Control of Five-Phase IM under Open-Phase Fault Operation. Energies 2021, 14, 1317. [Google Scholar] [CrossRef]
- Baudart, F.; Dehez, B.; Matagne, E.; Telteu-nedelcu, D.; Alexandre, P.; Labrique, F. Torque Control Strategy of Polyphase Permanent-Magnet Synchronous Machines With Minimal Controller Reconfiguration Under Open-Circuit Fault of One Phase. IEEE Trans. Ind. Electron. 2012, 59, 2632–2644. [Google Scholar] [CrossRef]
- Jia, H.; Yang, J.; Deng, R.; Wang, Y. Loss Investigation for Multiphase Induction Machine under Open-Circuit Fault Using Field–Circuit Coupling Finite Element Method. Energies 2021, 14, 5686. [Google Scholar] [CrossRef]
- Fu, J.R.; Lipo, T.A. Disturbance-Free Operation of a Multiphase Current-Regulated Motor Drive with an Opened Phase. IEEE Trans. Ind. Appl. 1994, 30, 1267–1274. [Google Scholar]
- Zheng, L.; Fletcher, J.E.; Williams, B.W. Current Optimization for a Multi-Phase Machine under an Open Circuit Phase Fault Condition. In Proceedings of the 3rd IET International Conference on Power Electronics, Machines and Drives (PEMD 2006), Dublin, Ireland, 4–6 April 2006; pp. 414–419. [Google Scholar]
- Mohammadpour, A.; Sadeghi, S.; Parsa, L. A Generalized Fault-Tolerant Control Strategy for Five-Phase PM Motor Drives Considering Star, Pentagon, and Pentacle Connections of Stator Windings. IEEE Trans. Ind. Electron. 2014, 61, 63–75. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.; Ahmed, S.; Elserougi, A.; Massoud, A. Effect of Stator Winding Connection of Five-Phase Induction Machines on Torque Ripples Under Open Line Condition. IEEE/ASME Trans. Mechatron. 2015, 20, 580–593. [Google Scholar] [CrossRef]
- Sedrine, E.; Ojeda, J.; Gabsi, M.; Slama-Belkhodja, I. Fault-Tolerant Control Using the GA Optimization Considering the Reluctance Torque of a Five-Phase Flux Switching Machine. IEEE Trans. Energy Convers. 2015, 30, 927–938. [Google Scholar] [CrossRef]
- Tian, B.; Hu, J.; Huang, X.; Zhou, B.; An, Q. Performance comparison of three types of PWM techniques for a Five-phase PMSM with a single-phase open circuited. In Proceedings of the 2021 13th International Symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 1–3 July 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, G.; Zhao, W.; Qu, L.; Xu, G. Asymmetrical SVPWM Fault-Tolerant Control of Five-Phase PM Brushless Motors. IEEE Trans. Energy Convers. 2017, 32, 12–22. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.; Barrero, F.; Zarri, L.; Bogado, B.; Prieto, I.; Arahal, M. Comparative study of predictive and resonant controllers in fault-tolerant five-phase induction motor drives. IEEE Trans. Ind. Electron. 2016, 63, 606–617. [Google Scholar] [CrossRef]
- Cheng, L.; Sui, Y.; Zheng, P.; Wang, P.; Wu, F. Implementation of postfault decoupling vector control and mitigation of current ripple for five-phase fault-tolerant PM machine under single-phase open-circuit fault. IEEE Trans. Power Electron. 2018, 33, 8623–8636. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, W.; Liu, G.; Cheng, R.; Xie, Y. Remedial field-oriented control of five-phase fault-tolerant permanent-magnet motor by using reduced-order transformation matrices. IEEE Trans. Ind. Electron. 2017, 64, 169–178. [Google Scholar] [CrossRef]
- Chen, Q.; Zhao, W.; Liu, G.; Lin, Z. Extension of virtual-signal injection-based MTPA control for five-phase IPMSM into fault-tolerant operation. IEEE Trans. Ind. Electron. 2019, 66, 944–955. [Google Scholar] [CrossRef]
- Chen, Q.; Gu, L.; Lin, Z.; Liu, G. Extension of space-vector signal-injection-based MTPA control into SVPWM fault-tolerant operation for five-phase IPMSM. IEEE Trans. Ind. Electron. 2020, 67, 7321–7333. [Google Scholar] [CrossRef]
- Bermudez, M.; Gonzalez-Prieto, I.; Barrero, F.; Guzman, H.; Kestelyn, X.; Duran, M.J. An Experimental Assessment of Open-Phase Fault-Tolerant Virtual-Vector-Based Direct Torque Control in Five-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2018, 33, 2774–2784. [Google Scholar] [CrossRef] [Green Version]
- Tian, B.; Mirzaeva, G.; An, Q.; Sun, L.; Semenov, D. Fault-Tolerant Control of a Five-Phase Permanent Magnet Synchronous Motor for Industry Applications. IEEE Trans. Ind. Appl. 2018, 54, 3943–3952. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Yin, F.; Qi, J. Model Predictive Current Control of Open-Circuit Fault-Tolerant Five-Phase Flux- Switching Permanent Magnet Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1840–1849. [Google Scholar] [CrossRef]
- Zheng, L.; Fletcher, J.E.; Williams, B.W.; He, X. A novel direct torque control scheme for a sensorless five-phase induction motor drive. IEEE Trans. Ind. Electron. 2011, 58, 503–513. [Google Scholar] [CrossRef]
- Mini, Y.; Nguyen, N.K.; Semail, E.; Vu, D.T. Enhancement of Sensorless Control for Non-Sinusoidal Multiphase Drives-Part I: Operation in Medium and High-Speed Range. Energies 2022, 15, 607. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P. Improved rotor position estimation accuracy by rotating carrier signal injection utilizing zero-sequence carrier voltage for dual three-phase PMSM. IEEE Trans. Ind. Electron. 2017, 64, 4454–4462. [Google Scholar] [CrossRef]
- Liu, G.; Geng, C.; Chen, Q. Sensorless Control for Five-Phase IPMSM Drives by Injecting HF Square-Wave Voltage Signal into Third Harmonic-Space. IEEE Access 2020, 8, 69712–69721. [Google Scholar] [CrossRef]
- Saleh, K.; Sumner, M. Sensorless Control of Seven-Phase PMSM Drives Using NSV-SVPWM with Minimum Current Distortion. Electronics 2022, 11, 792. [Google Scholar] [CrossRef]
- Saleh, K.; Sumner, M. Sensorless Speed Control of Five-Phase PMSM Drives in Case of a Single-Phase Open-Circuit Fault. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 501–517. [Google Scholar] [CrossRef]
- Saleh, K.; Sumner, M. Sensorless Speed Control of a Fault-Tolerant Five-Phase PMSM Drives. Electr. Power Compon. Syst. 2020, 48, 919–932. [Google Scholar] [CrossRef]
- Chen, K.Y. Multiphase pulse-width modulation considering reference order for sinusoidal wave production. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1155–1160. [Google Scholar]
- Xue, S.; Wen, X.; Feng, Z. A Novel Multi-Dimensional SVPWM Strategy of Multiphase Motor Drives. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; pp. 931–935. [Google Scholar]
- Wang, P.; Zheng, P.; Wu, F.; Zhang, J.; Li, T. Research on dual-plane vector control of fivephase fault-tolerant permanent magnet machine. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, Chian, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Munim, W.N.W.A.; Che, H.S.; Hew, W.P. Fault tolerant capability of symmetrical multiphase machines under one open-circuit fault. In Proceedings of the 4th IET Clean Energy and Technology Conference (CEAT 2016), Kuala Lumpur, Malaysia, 14–15 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Van Patten, K.W. High-resolution velocity estimation for all-digital, AC servo drives. IEEE Trans. Ind. Appl. 1991, 27, 701–705. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle of Reference Voltage (θ) | Sector | Angle of Reference Voltage (θ) | Sector |
|---|---|---|---|
| ° | 1 | 7 | |
| ° | 2 | 8 | |
| ° | 3 | 9 | |
| 4 | ° | 10 | |
| 5 | ° | 11 | |
| ° | 6 | 12 |
| Sector | Switching Time | Switching Sequence |
|---|---|---|
| 1 | V3, V1, V5, V2, V4 | |
| 2 | V3, V6, V5, V7, V4 | |
| 3 | V8, V6, V10, V7, V9 | |
| 4 | V8, V11, V10, V12, V9 | |
| 5 | V14, V11, V13, V12, V15 | |
| 6 | V14, V16, V13, V17, V15 | |
| 7 | V18, V16, V20, V17, V19 | |
| 8 | V18, V21, V20, V22, V19 | |
| 9 | V23, V21, V25, V22, V24 | |
| 10 | V23, V26, V25, V27, V24 | |
| 11 | V29, V26, V28, V27, V30 | |
| 12 | V29, V1, V28, V2, V30 |
| Sector | ||||||
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| 11 | ||||||
| 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh, K. Seven-Phase PMSM Drives Operation Post Two Types of Faults. Appl. Sci. 2022, 12, 7979. https://doi.org/10.3390/app12167979
Saleh K. Seven-Phase PMSM Drives Operation Post Two Types of Faults. Applied Sciences. 2022; 12(16):7979. https://doi.org/10.3390/app12167979
Chicago/Turabian StyleSaleh, Kamel. 2022. "Seven-Phase PMSM Drives Operation Post Two Types of Faults" Applied Sciences 12, no. 16: 7979. https://doi.org/10.3390/app12167979
APA StyleSaleh, K. (2022). Seven-Phase PMSM Drives Operation Post Two Types of Faults. Applied Sciences, 12(16), 7979. https://doi.org/10.3390/app12167979