
One-Stage Disease Detection Method for Maize Leaf Based on Multi-Scale Feature Fusion



Abstract
:1. Introduction
- (1)
- The change of illumination makes it difficult to locate the target area accurately. Due to the change in light intensity and reflection, as well as other reasons, it is difficult to accurately locate the diseased area in some detection images. Even under the same light intensity, the shooting angle and height may cause the color depth of the diseased area to be different, making the disease characteristics not significant, and thus affecting the detection accuracy.
- (2)
- The complex background makes it difficult to detect the target accurately. The image background of plant leaf disease is complex and may include leaves, trunks, weeds, fallen leaves, shadows, etc. The color and shape of the plant disease may be similar to other objects in the background, resulting in an increased difficulty of target detection.
- (3)
- Occlusion leads to missing target features and overlapping noise. Occlusion problems include blade occlusion caused by blade attitude changes, branch occlusion, light occlusion caused by external illumination, and mixed occlusion caused by different occlusion types. Due to occlusion, feature deletion and noise overlap lead to false detection or even missed detection.
- (4)
- The sparse target distribution affects the detection accuracy. Due to the limitation of the convolution receptive field, the connection between target pixels with sparse distribution is not strong, and the context extraction is not sufficient, which leads to the failure of modeling, thus affecting the detection accuracy.
- (1)
- We add a coordinate attention (CA) module to the backbone network and increase the weight of key features to strengthen the effective information of the feature map.
- (2)
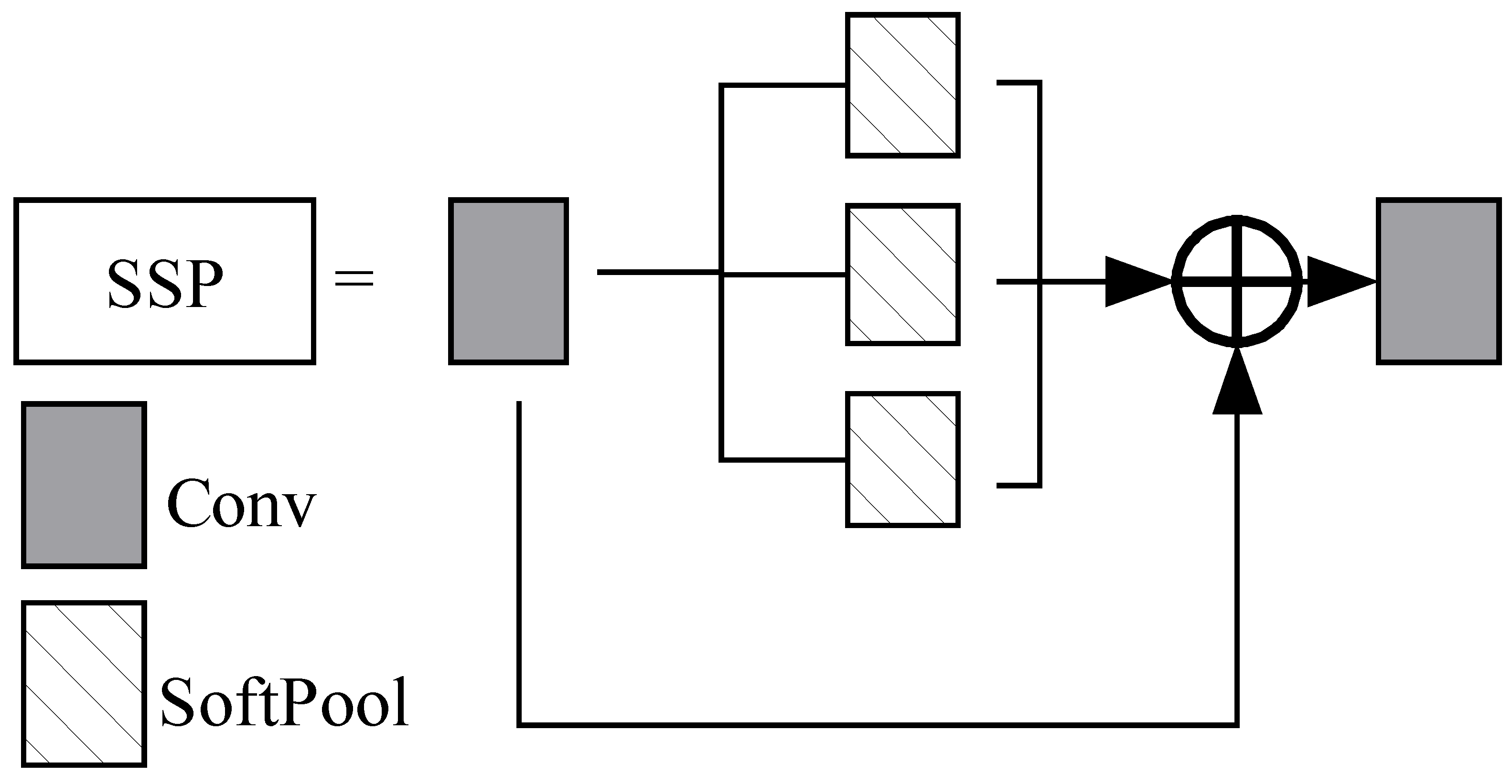
- We improve the spatial pyramid pooling (SPP) module to reduce the loss of feature information caused by traditional pooling.
- (3)
- We solve the problem of the insufficient dataset through data enhancement, enrich the training data, improve the generalization performance and robustness of the model, and prevent overfitting.
2. Materials and Methods
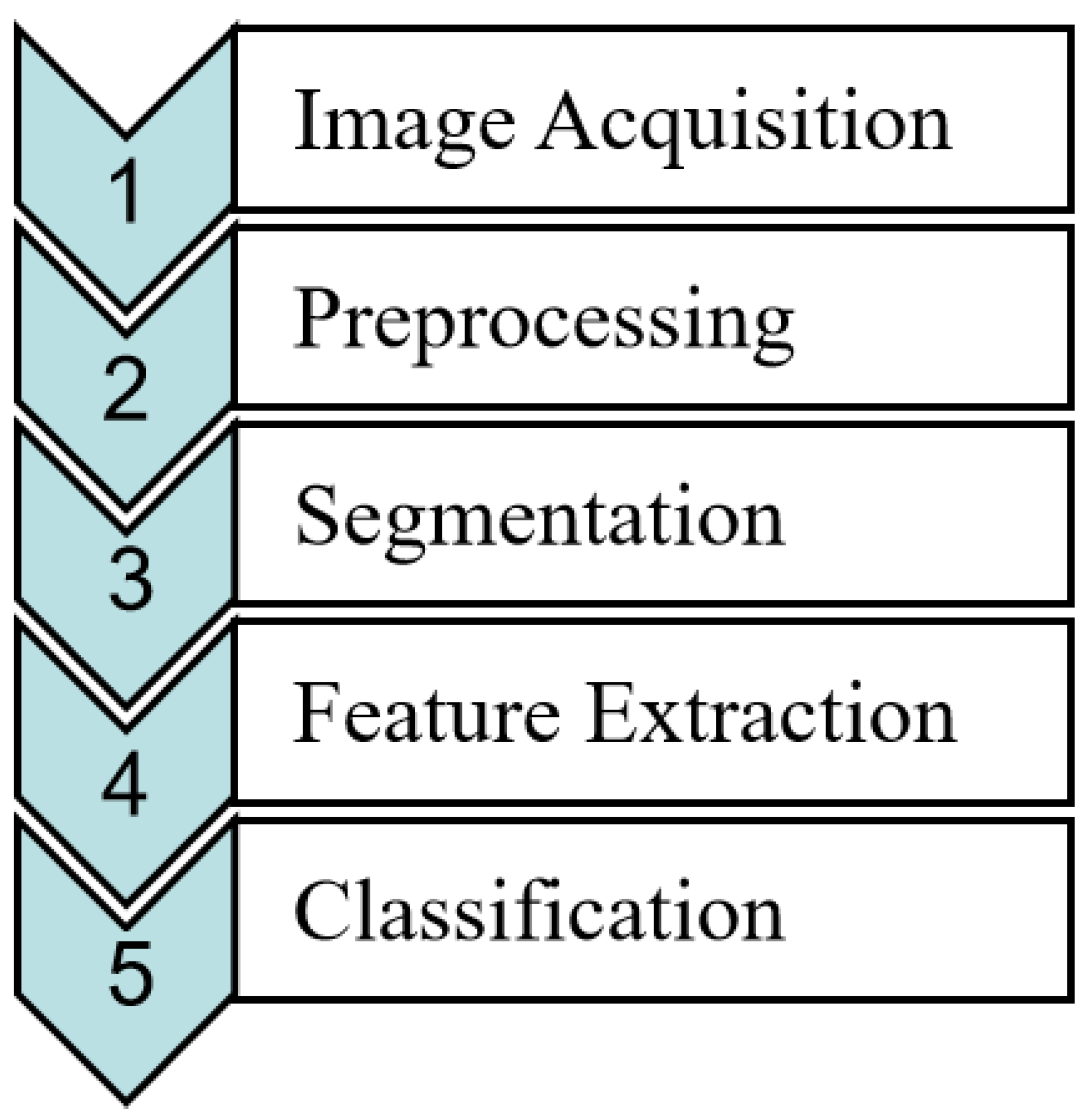
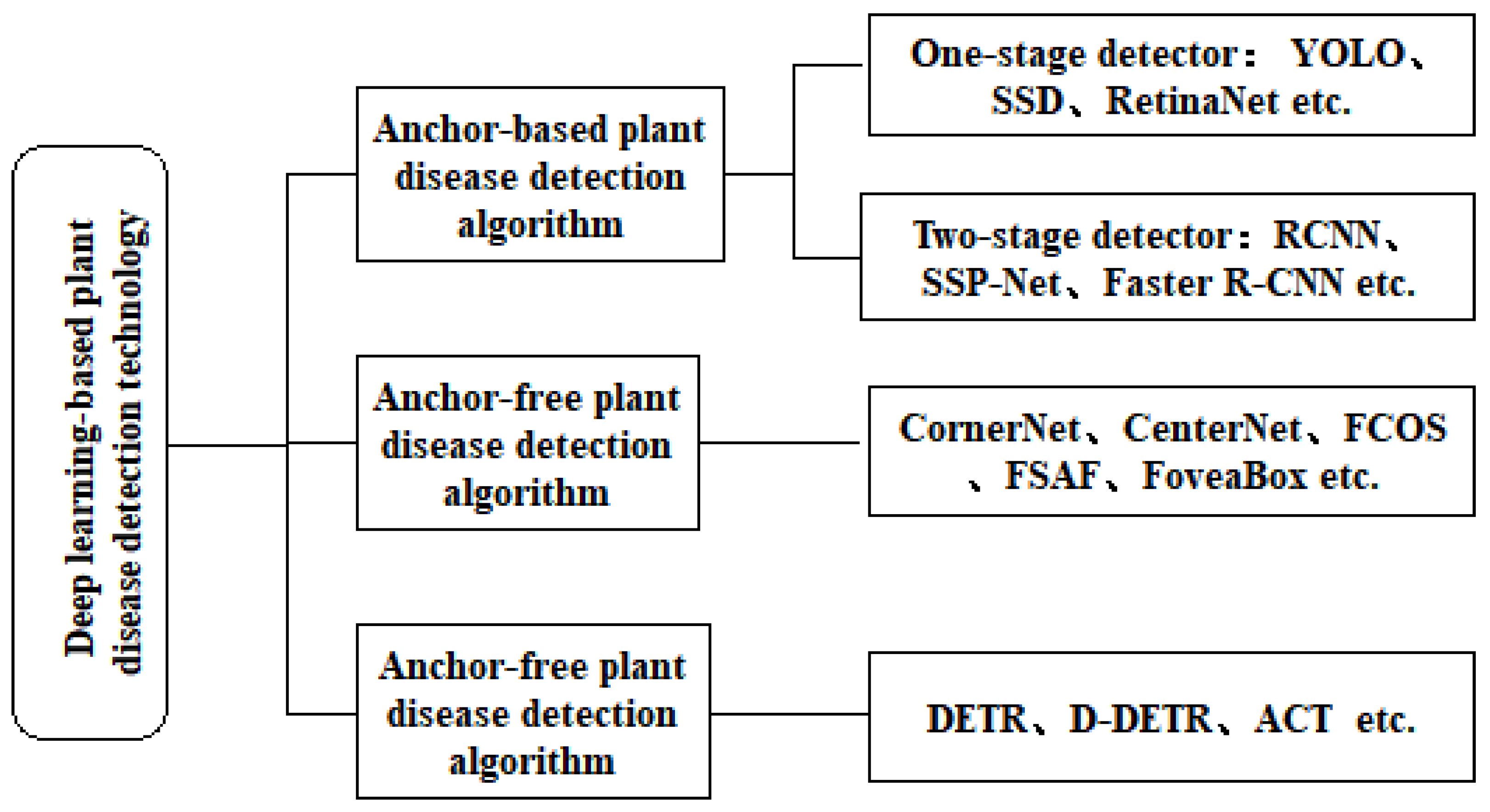
2.1. Deep Learning-Based Plant Disease Detection Technology
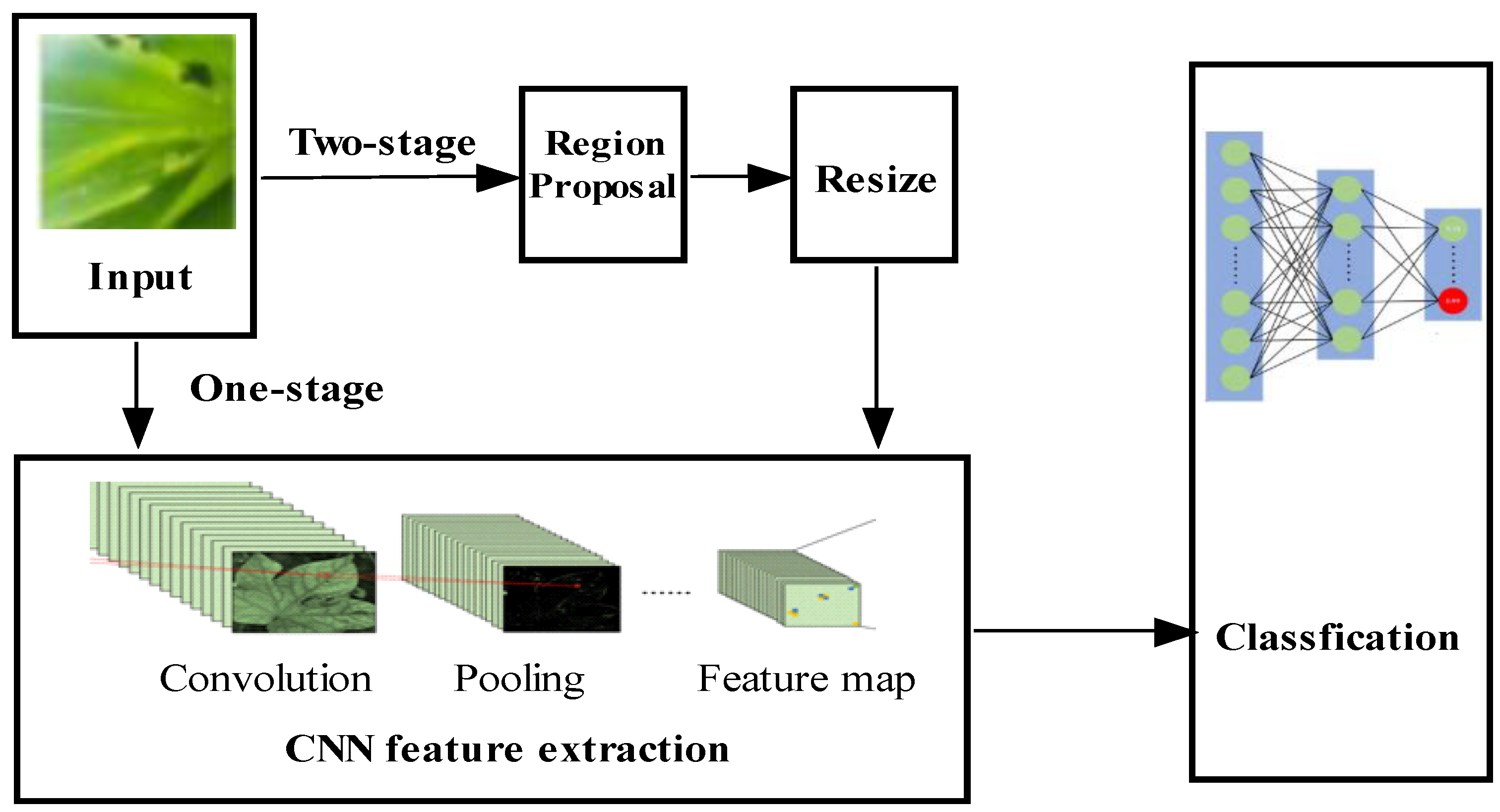
2.1.1. Anchor-Based Plant Disease Detection Algorithm
Two-Stage Detector
One-Stage Detector
2.2. Anchor-Free Plant Disease Detection Algorithms
2.2.1. YoLo
2.2.2. CenterNet
2.3. Transformer-Based Plant Disease Detection Algorithm
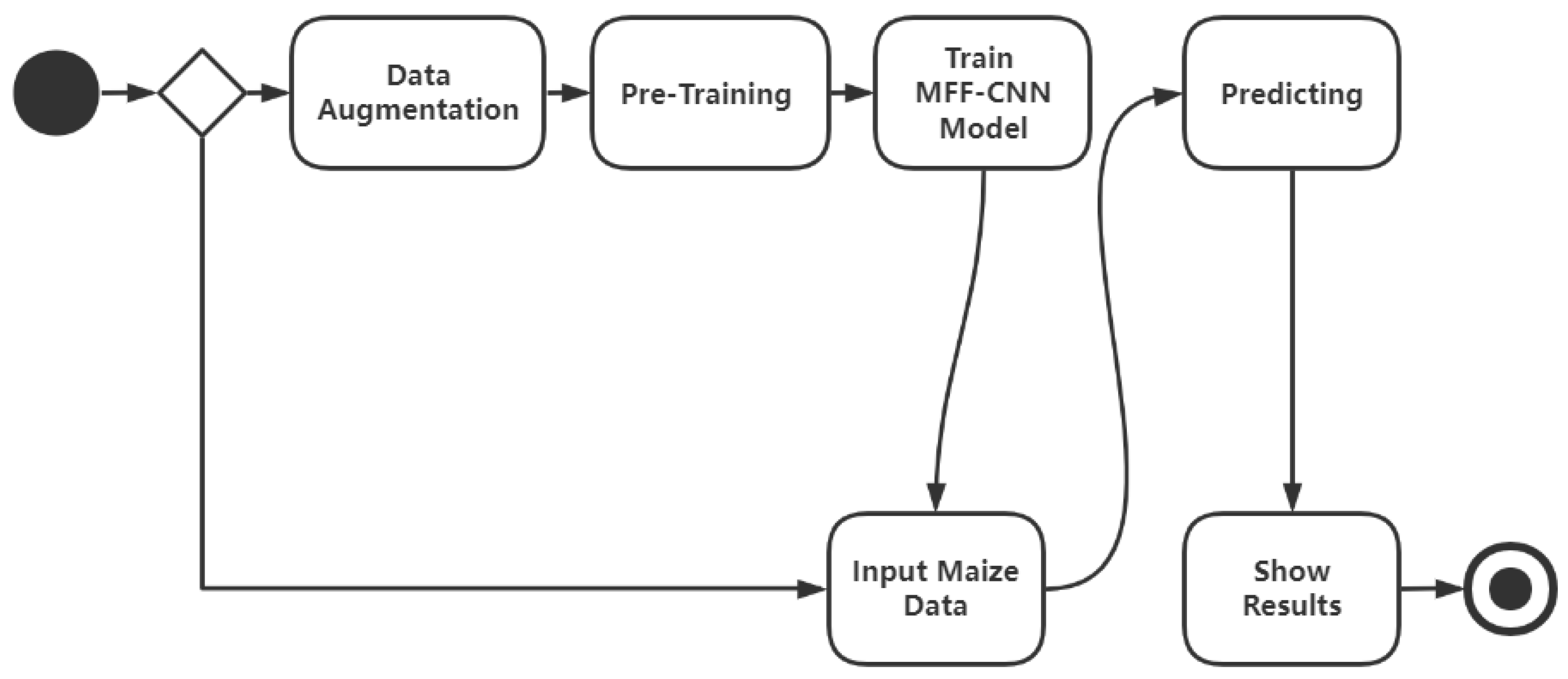
2.4. The Method Proposed in This Paper
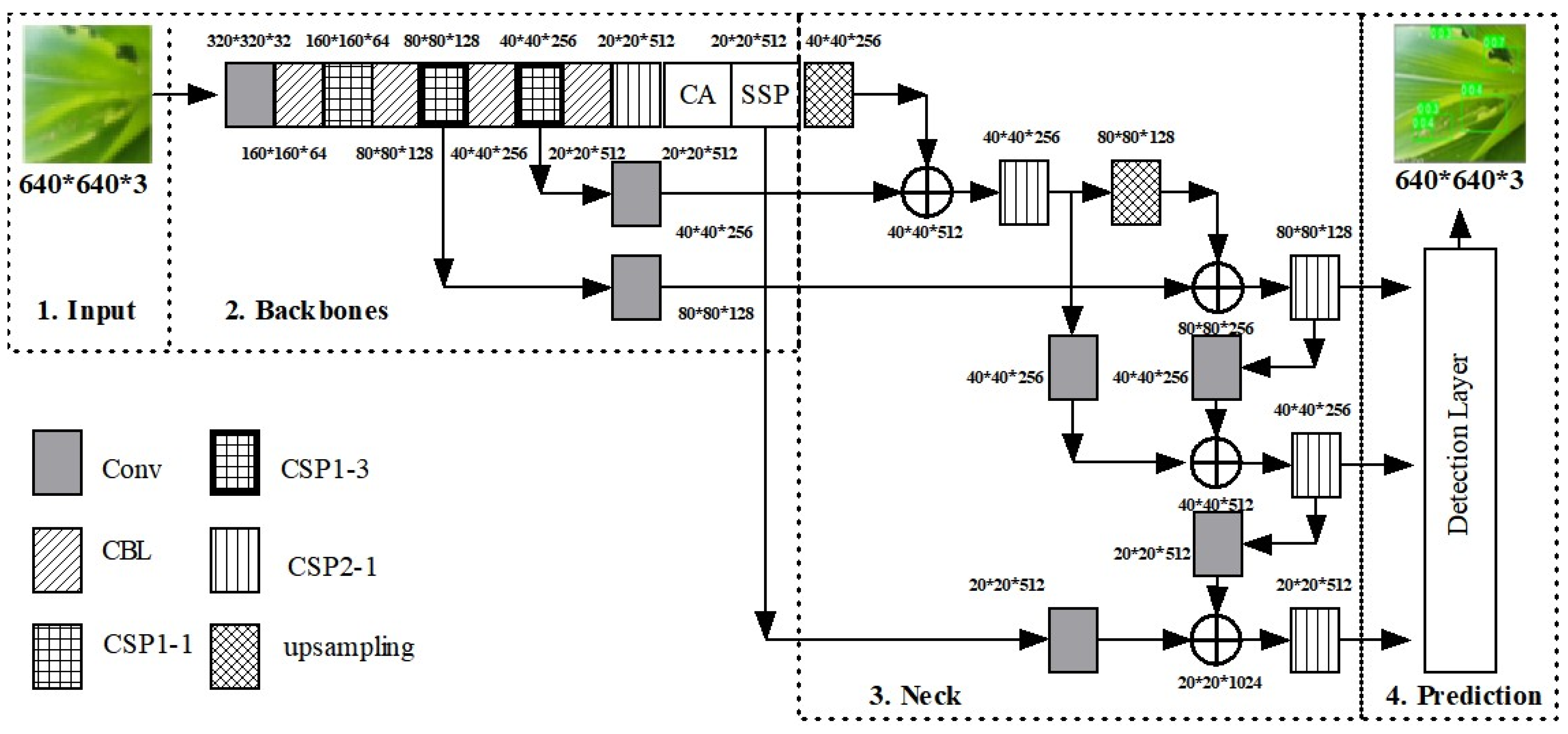
2.4.1. Network Structure
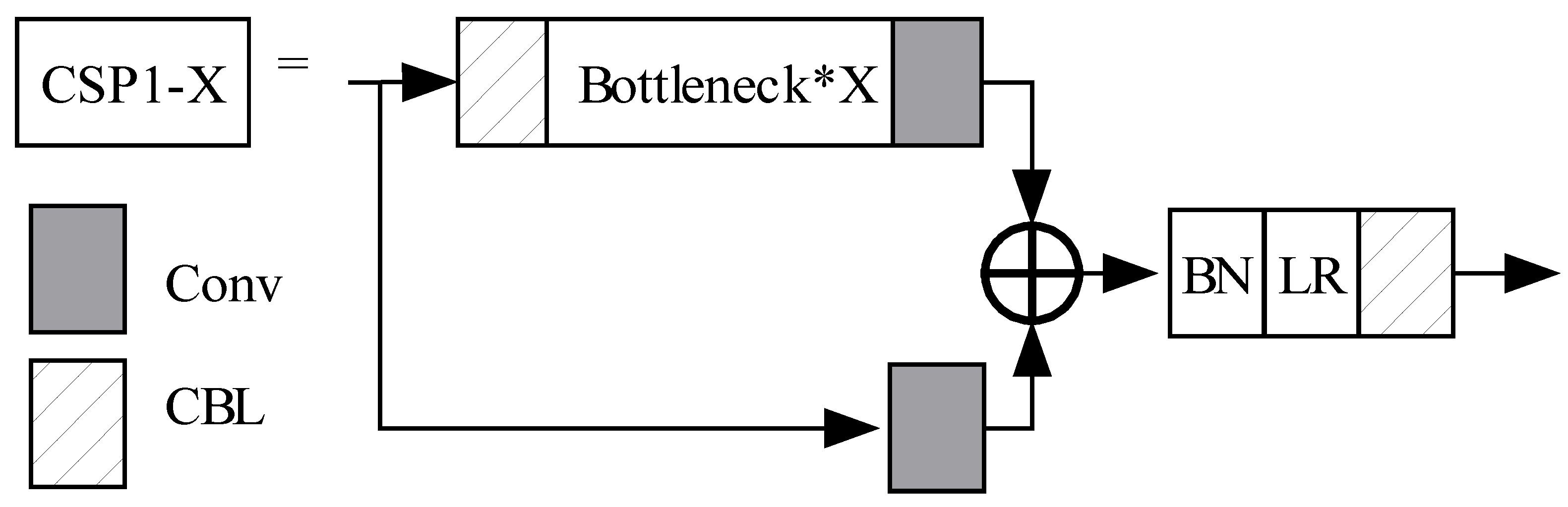
Backbone
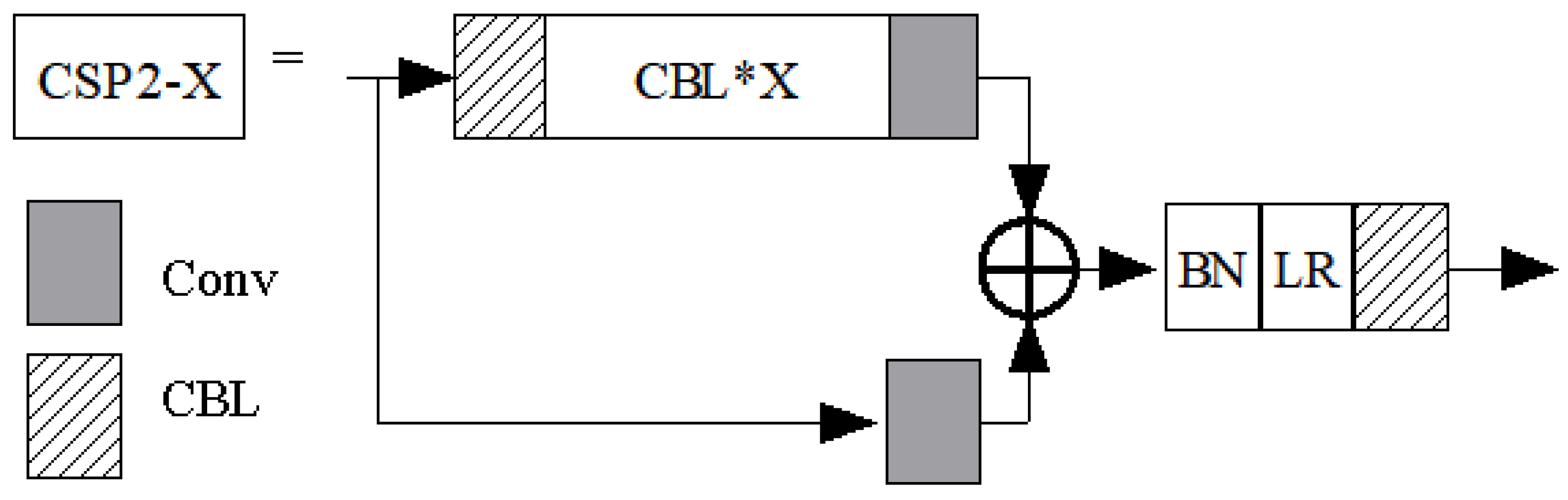
Neck
Detection Head
2.4.2. Coordinate Attention
| Algorithm 1: Coordinate Attention |
| Input: Feature points in the C*H*W dimensions of the feature map. Output: Attentional activation feature map with the three feature dimensions C*H*W. 1. First, conduct adaptive average pooling along the H direction and W direction, accordingly, to obtain C*1*W and C*H*1 scale feature maps, respectively. 2. The two feature maps are then concatenated and convolved to obtain the C/r*1*(W + H) feature map. 3. Perform BatchNorm and non-linear regression operations 4. Separately perform Sigmoid activation function operations. 5. The original input feature map and the output two feature maps are performing matrix multiplication. 6. Finally, the C*H*W feature map is output. |
Coordinate Information Embedding
Coordinate Attention Generation
2.4.3. SSP Improvement
3. Experimentation and Performance Evaluation
3.1. Dataset and Parameter Settings
3.2. Experimental Results and Analysis
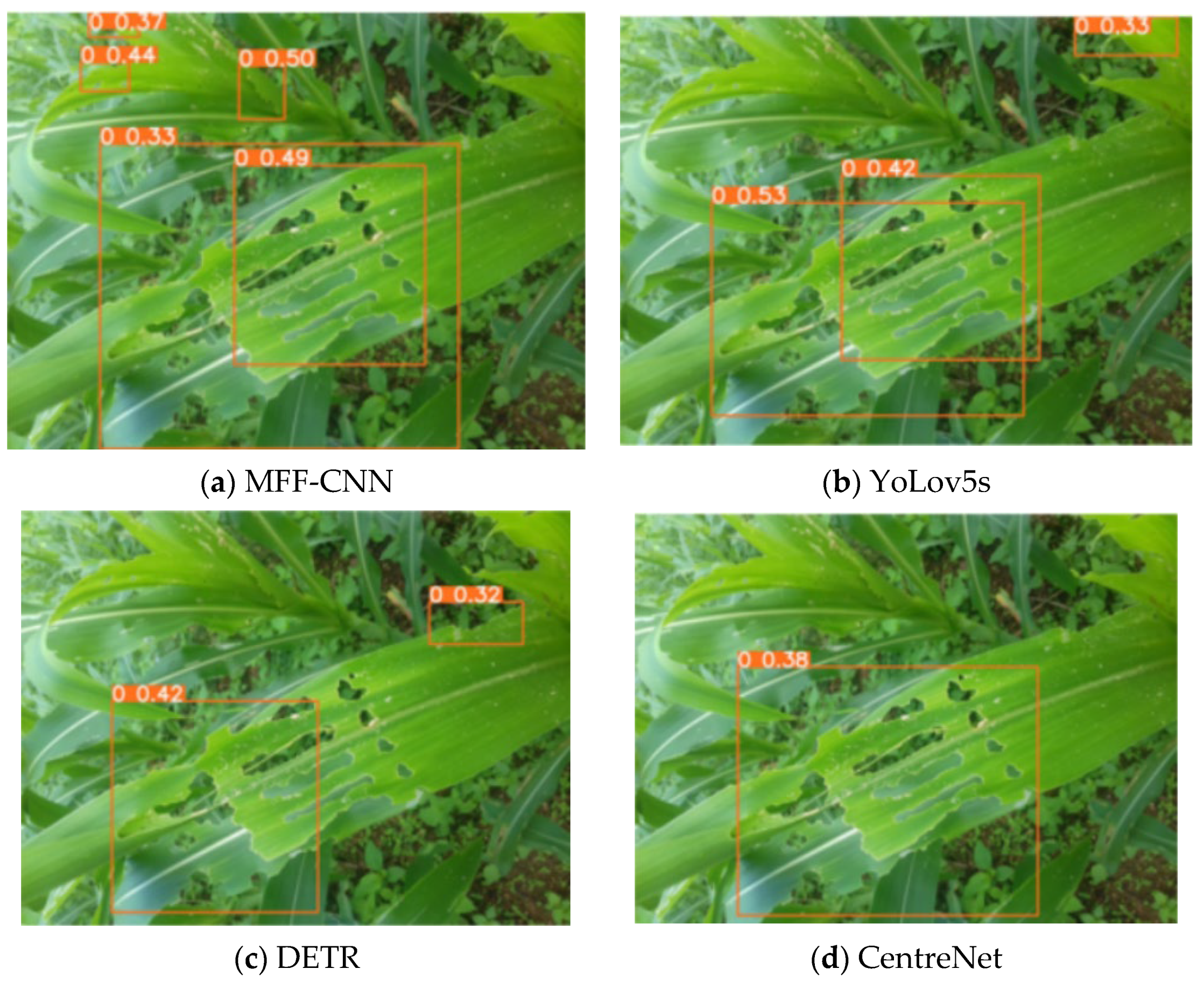
3.2.1. Detection of Target Area Overlap Occlusion
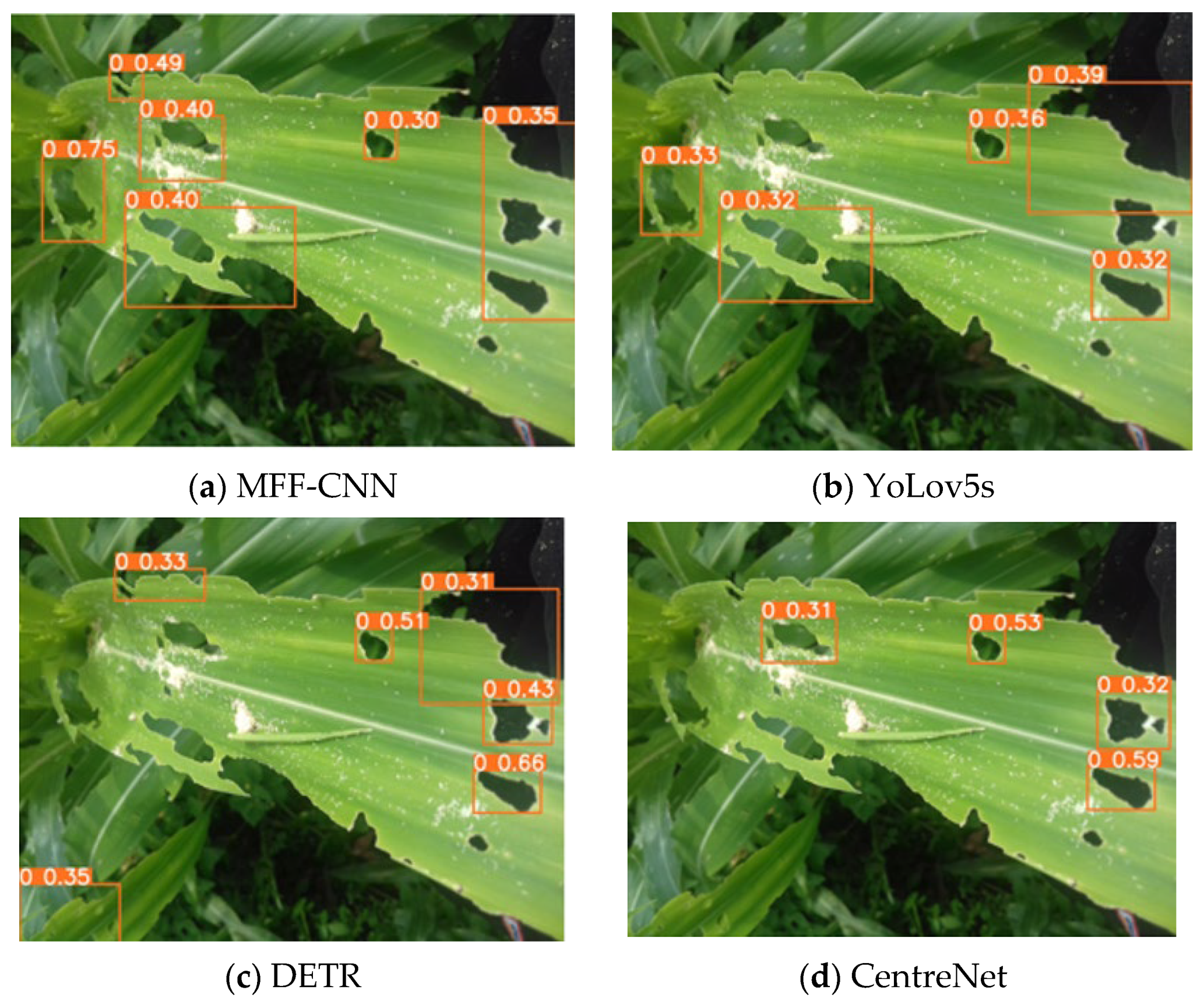
3.2.2. Detection of Sparsely Distributed Targets
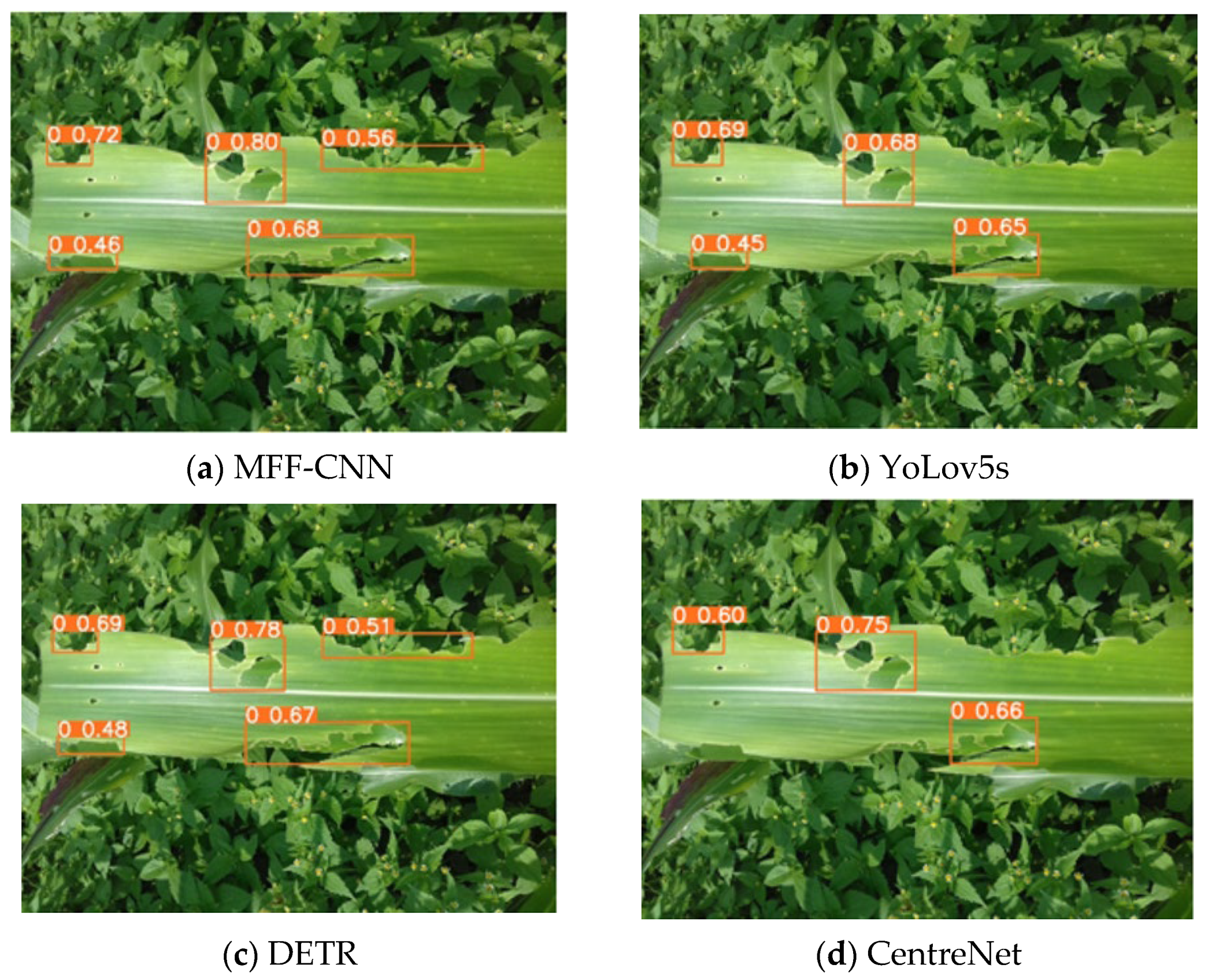
3.2.3. Detection of Target and Background Texture Similarity
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, A.K.; Ganapathysubramanian, B.; Sarkar, S.; Singh, A. Deep learning for plant stress phenotyping: Trends and future perspectives. Trends Plant Sci. 2018, 23, 883–898. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bargshady, G.; Zhou, X.; Deo, R.C.; Soar, J.; Whittaker, F.; Wang, H. Enhanced deep learning algorithm development to detect pain intensity from facial expression images. Expert Syst. Appl. 2020, 149, 113305. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; IEEE Press: New York, NY, USA, 2015. [Google Scholar]
- Liu, T.; Feng, Q. Detecting grape leaves based on convolutional neural network. J. Northwest Univ. 2017, 47, 505–512. [Google Scholar]
- Bari, B.S.; Islam, N.; Rashid, M.; Razman, A.; Majeed, A. A real-time approach of diagnosing rice leaf disease using deep learning-based faster R-CNN framework. Peer J. Comput. Sci. 2021, 7, e432. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2016. [Google Scholar]
- Bhatt, P.; Sarangi, S.; Pappula, S. Detection of diseases and pests on images captured in uncontrolled conditions from tea plantations. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV, Baltimore, MD, USA, 15–16 April 2019. [Google Scholar]
- Wang, C.; Luo, Q.; Chen, X.; Yi, B.; Wang, H. Citrus recognition based on YoLo4 neural network. J. Phys. Conf. Ser. 2021, 1820, 012163. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, D.; Krhenbühl, P. Objects as Points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Albattah, W.; Nawaz, M.; Javed, A.; Masood, M.; Albahli, S. A novel deep learning method for detection and classification of plant diseases. Complex Intell. Syst. 2022, 8, 507–524. [Google Scholar] [CrossRef]
- Rashid, J.; Khan, I.; Ali, G. Multi-level deep learning model for potato leaf disease recognition. Electronics 2021, 10, 2064. [Google Scholar] [CrossRef]
- Anandhan, K.; Singh, A.S. Detection of Paddy Crops Diseases and Early Diagnosis Using Faster Regional Convolutional Neural Networks. In Proceedings of the 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 4–5 March 2021. [Google Scholar]
- Kumar, P. Research Paper on Sugarcane Disease Detection Model. Turk. J. Comput. Math. Educ. 2021, 12, 5167–5174. [Google Scholar]
- Maski, P.; Thondiyath, A. Plant Disease Detection Using Advanced Deep Learning Algorithms: A Case Study of Papaya Ring Spot Disease. In Proceedings of the 2021 6th International Conference on Image, Vision and Computing (ICIVC), Qingdao, China, 23–25 July 2021. [Google Scholar]
- Li, H.; Liu, H.L.; Liu, S.L. Development of dynamic recognition system of citrus pests and diseases based on deep Learning. J. Chin. Agric. Mech. 2021, 42, 195–201, 208. [Google Scholar] [CrossRef]
- Rehman, Z.U.; Kha Thondiyathn, M.A.; Ahmed, F.; Damaeviius, R.; Javed, K. Recognizing apple leaf diseases using a novel parallel real-time processing framework based on MASK RCNN and transfer learning: An application for smart agriculture. IET Image Process. 2021, 15, 2157–2168. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Early recognition of tomato gray leaf spot disease based on MobileNetv2-YOLOv3 model. Plant Methods 2020, 16, 83. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Ma, Y.; Liu, B.; He, J.; Wang, H. A Deep-Learning-Based Real-Time Detector for Grape Leaf Diseases Using Improved Convolutional Neural Networks. Front. Plant Sci. 2020, 11, 751. [Google Scholar] [CrossRef]
- Ramcharan, A.; McCloskey, P.; Baranowski, K.; Mbilinyi, N.; Mrisho, L.; Ndalahwa, M.; Legg, J.; Hughes, D.P. A mobile-based deep learning model for cassava disease diagnosis. Front. Plant Sci. 2019, 10, 272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Legendre, C.P.; Deschamps, F.; Zhao, L.; Chen, Q.F. Rayleigh-wave dispersion reveals crust-mantle decoupling beneath eastern Tibet. Sci. Rep. 2015, 5, 16644. [Google Scholar] [CrossRef] [Green Version]
- Bravo-Reyna, J.L.; Montero-Valverde, J.A.; Martínez-Arroyo, M.; Hernández-Hernández, J.L. Recognition of the Damage Caused by the Cogollero Worm to the Corn Plant, Using Artificial Vision. In Proceedings of the International Conference on Technologies and Innovation, Guayaquil, Ecuador, 30 November–3 December 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 111–122. [Google Scholar]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. Pattern Anal. Mach. Intell. IEEE Trans. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Shill, A.; Rahman, M.A. Plant Disease Detection Based on YOLOv3 and YOLOv4. In Proceedings of the 2021 International Conference on Automation, Control and Mechatronics for Industry 4.0 (ACMI), Rajshahi, Bangladesh, 8–9 July 2021. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 99, 2999–3007. [Google Scholar]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision 2018, Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Zhu, C.; He, Y.; Savvides, M. Feature Selective Anchor-Free Module for Single-Shot Object Detection. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 734–750. [Google Scholar]
- Kong, T.; Sun, F.; Liu, H.; Jiang, Y.; Shi, J. FoveaBox: Beyond Anchor-based Object Detector. IEEE Trans. Image Process. 2019, 29, 7389–7398. [Google Scholar] [CrossRef]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. CenterNet: Keypoint Triplets for Object Detection. In Proceedings of the IEEE International Conference on Computer Vision 2019, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H. YoLov4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Xia, X.; Sun, Q.; Shi, X. Apple detection model based on lightweight anchor-free deep convolutional neural network. Smart Agric. 2020, 2, 99–110. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Neubeck, A.; Gool, L. Efficient Non-Maximum Suppression. In Proceedings of the International Conference on Pattern Recognition 2006, Hong Kong, China, 20–24 August 2006. [Google Scholar]
- Yu, J.; Jiang, Y.; Wang, Z.; Cao, Z.; Huang, T. Unitbox: An Advanced Object Detection Network. In Proceedings of the 24th ACM International Conference on Multimedia, Amsterdam, The Netherlands, 15–19 October 2016. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate Attention for Efficient Mobile Network Design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition 2021, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Stergiou, A.; Poppe, R.; Kalliatakis, G. Refining activation downsampling with SoftPool. In Proceedings of the IEEE/CVF International Conference on Computer Vision 2021, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Corn Leaf Infection Dataset. Available online: https://www.kaggle.com/datasets/qramkrishna/corn-leaf-infection-dataset (accessed on 6 June 2021).
- Everingham, M.; Gool, L.V.; Gool, L.V.; Williams, C.K.I.; Williams, C.K.I.; Winn, J.; Winn, J.; Zisserman, A.; Zisserman, A. Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Vicente, S.; Carreira, J.; Agapito, L.; Batista, J. Reconstructing PASCAL VOC. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2014, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1106–1114. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, S.; Zhang, J.; Huang, K.; Peng, C.L. MVP-Net: Multi-view FPN with Position-aware Attention for Deep Universal Lesion Detection. In Proceedings of the MICCAI 2019, Shenzhen, China, 13–17 October 2019. [Google Scholar]
- Yang, J.; He, Y.; Kuang, K.; Lin, Z.; Pfister, H.; Ni, B. Asymmetric 3D Context Fusion for Universal Lesion Detection. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention 2021, Strasbourg, France, 27 September–1 October 2021. [Google Scholar]
- Ghiasi, G.; Lin, T.Y.; Le, Q.V. Dropblock: A regularization method for convolutional networks. In Proceedings of the 32nd Conference on Neural Information Processing Systems (NeurIPS 2018), Montréal, QC, Canada, 3–8 December 2018; p. 31. [Google Scholar]
- Hernández-Hernández, J.; García-Mateos, G.; González-Esquiva, J.; Escarabajal-Henarejos, D.; Ruiz-Canales, A.; Molina-Martínez, J. Optimal color space selection method for plant/soil segmentation in agriculture. Comput. Electron. Agric. 2016, 122, 124–132. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant Type | Dataset | Strength | Detection Network Framework | References | Year |
|---|---|---|---|---|---|
| Paddy crops | 1500 | Better accuracy | Mask R-CNN | Anandhan, Singh, etc. [13] | 2021 |
| Sugarcane | 2940 | Higher accuracy | Faster-RCNN | Kumar [14] | 2021 |
| Papaya | 2000 | Propose the use of lighter versions of YOLO which are more efficient and have high detection speed | YOLO | Maski, Thondiyath [15] | 2021 |
| Citrus | 392 | Higher accuracy | YoLov4 | Li Hao, etc. [16] | 2021 |
| Apple | 1200 | Better accuracy | Mask RCNN | Rehman etc. [17] | 2021 |
| Grape | 4500 | Better accuracy | GLDDN | Dwivedi, etc. [5] | 2021 |
| Tomatoes | 2385 | Efficient and precise | MobileNetv2-YoLov3 | Liu and Wang [18] | 2020 |
| Grape | 4449 | Higher accuracy and a satisfactory detection speed | Faster DR-IACNN | Xie, etc. [19] | 2020 |
| Cassava | 2415 | Deploy the model in a mobile application and test its performance on mobile images and video | SSD | Ramcharan, etc. [20] | 2019 |
| Tea | 4000 | Identify an accurate yet efficient detector in terms of speed and memory | YOLOv3 | Bhatt, etc. [8] | 2019 |
| Algorithm | Mean Average Precision (mAP) | Detection Time/s | FLOPs |
|---|---|---|---|
| MFF-CNN | 0.486 | 0.039 | 4.2 |
| YoLov5s | 0.47 | 0.017 | 16.5 |
| DETR | 0.467 | 2.054 | 76.5 |
| CenterNet | 0.433 | 1.222 | 34.97 |
| Faster RCNN | 0.382 | 0.409 | 256.3 |
| Methods | 0.5 | 1 | 2 | 3 | 4 | 8 | Avg. [0.5, 1, 2, 4, 8] |
|---|---|---|---|---|---|---|---|
| MFF-CNN | 25.59 | 37.05 | 47.93 | 56.13 | 61.27 | 71.01 | 49.83 |
| YoLov5s | 25.14 | 36.49 | 46.40 | 53.06 | 58.11 | 67.93 | 47.85 |
| DETR | 24.23 | 34.86 | 46.85 | 54.59 | 59.64 | 70.09 | 48.38 |
| CenterNet | 21.71 | 30.54 | 43.51 | 50.36 | 56.85 | 68.83 | 45.30 |
| Faster RCNN | 18.38 | 29.01 | 39.28 | 45.77 | 51.44 | 62.88 | 41.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Sun, S.; Zhang, C.; Yang, G.; Ye, Q. One-Stage Disease Detection Method for Maize Leaf Based on Multi-Scale Feature Fusion. Appl. Sci. 2022, 12, 7960. https://doi.org/10.3390/app12167960
Li Y, Sun S, Zhang C, Yang G, Ye Q. One-Stage Disease Detection Method for Maize Leaf Based on Multi-Scale Feature Fusion. Applied Sciences. 2022; 12(16):7960. https://doi.org/10.3390/app12167960
Chicago/Turabian StyleLi, Ying, Shiyu Sun, Changshe Zhang, Guangsong Yang, and Qiubo Ye. 2022. "One-Stage Disease Detection Method for Maize Leaf Based on Multi-Scale Feature Fusion" Applied Sciences 12, no. 16: 7960. https://doi.org/10.3390/app12167960
APA StyleLi, Y., Sun, S., Zhang, C., Yang, G., & Ye, Q. (2022). One-Stage Disease Detection Method for Maize Leaf Based on Multi-Scale Feature Fusion. Applied Sciences, 12(16), 7960. https://doi.org/10.3390/app12167960