1. Introduction
Owing to the wide applications of multiagent systems (MASs) in practice, its related research has attracted great attention from scholars. Cooperative control technology is an important issue of MASs, which are widely used in the fields of unmanned aerial vehicle formation [
1], power systems [
2], cluster robots [
3] and so on. Moreover, consensus is one of the most popular issues of cooperative control technology, and the related research has achieved fruitful results so far [
4,
5,
6,
7]. The general concept of consensus, however, cannot tolerate any interference. To tackle the effect of external disturbance or attack, the quasi-consensus is proposed. The concept of quasi-consensus is used to describe the effects caused by the interference, and the error state is finally within a bound corresponding to the interference above, instead of zero, as the time tends to infinity. It is great significance when the MASs encounter some inevitable environmental or artificial disturbance in practical applications. For example, Hu [
8] studied the quasi-consensus of second-order MASs with external disturbances, and Ma [
9] studied the quasi-consensus of discrete-time time-varying MASs with randomly occurring nonlinearities (RONs) and deception attacks, where the RONs were first studied in [
10]. In MASs, according to whether there is a leader or not, they can be divided into leader-following and non-leader-following consensuses. The consensus of leader-following is closer to reality, which is a hot topic in the current research. Almeida [
11] studied the leader-follower consensus of fractional MASs, and Liu [
12] studied the leader-following consensus of MASs with switched networks.
It is worth noting that MASs are usually in a complex and changeable engineering environment, and the evolution process of the system is affected by the surrounding environment, such as the uncertainty of system parameters and the change in system nonlinear dynamics caused by environmental impact. These objective phenomena may seriously affect the evolution process of the system. Considering randomly occurring uncertainties (ROUs) and RONs, robustness of systems are discussed [
13]. At present, many scholars have studied MASs with ROUs and RONs and achieved many excellent research results [
14,
15,
16,
17].
Considering the communication load and control cost, the selection and design of control strategy are very important in the research on the consensus of MASs. At the beginning, scholars used continuous control to make the MASs realize consensus, such as including control [
18], adaptive control [
19], pinning control [
20], etc. Although continuous control is relatively simple, continuous control requires the controller to work all the time, which leads to a waste of resources. To solve this problem, scholars proposed impulsive control, but the impulsive sequence is generally set and selected manually in advance. Impulsive control has been widely used in the control field because of its low control cost, strong robustness and good confidentiality. For examples, using impulsive control method, Li [
21] studied the stabilization of delayed systems; Zhang [
22] investigated the synchronization of delayed neural networks; and Yang [
23] considered the consensus of delayed MASs with random disturbances. However, because the impulsive sequence is artificially set, it may be too conservative a lead to increase unnecessary control times.
To solve these shortcoming, the event-triggered mechanism (ETM) [
24,
25,
26,
27] was proposed. The control sequence depends on some triggering conditions according to the system state and so on. Compared with time-triggered impulsive control, event-triggered impulsive control (ETIC) combines both the event-triggered strategy and impulsive control, and hence, ETIC can effectively reduces the cost of control [
28,
29,
30,
31]. At present, scholars attach great importance to the research of ETIC strategy. For instant, using ETIC, the consensus of linear MASs [
28], synchronization of neural networks [
30] and complex dynamic networks [
29] were investigated.
Inspired by the above discussion, based on the ETIC strategy, this paper studies the quasi-consensus of nonlinear MASs with various obstructions (ROUs, RONs and external disturbances). The main contributions are as follows:
In this paper, various obstructions are considered. Compared with the works in [
31], the stochastic characteristics of uncertainties, i.e., ROUs and RONs, are considered. Moreover, the external disturbances in the leader and followers here can be different. Hence, the system model is more general and practical.
The ETM designed in this paper is antidisturbance compared with the existing results [
32,
33,
34]. Additionally, differently from the one in [
31], the effects of disturbances are intuitive, which makes it easier to adjust for various disturbances.
Notation 1. , and are defined as the set of positive integers, the set of real numbers and the n-dimensional Euclidean space, respectively. By , we mean that is a seminegative definite matrix. denotes the transposition of matrix A, ⊗ represents the Kronecker product, represents both the induced matrix 2-norm and the usual Euclidean vector norm. stands for the maximum eigenvalue of the matrix A. denotes the mathematical expectation and is the probability of the event B. represents the n-dimensional identity matrix.
The rest of this paper is organized as follows. Preliminaries are given in
Section 2. The main results and the constructed ETM are established in
Section 3.
Section 4 gives an example to verify the derived results, and
Section 5 concludes this paper.
2. Preliminaries and Model Description
2.1. Graph Theory
In MASs, the communication among agents can be reflected by the graph. Each agent can be seen as a node, and let be the node set. Let be the edge set, and the undirected topology of MASs can be described by the graph , where represents the adjacency matrix of G. If , it means that agents i and j do not communicate with each other, there are , otherwise . Additionally, define . is defined as the degree matrix of G, where . is called the Laplacian matrix of G and . The communication state between leader and followers are represented by a matrix . If the follower can communicate with the leader, then , otherwise . We call the neighbor set of agent i. Let . is defined as the set of agents that communicate with the agent i. If a node can reach any nodes in the graph, then the node is called the root, and the graph has a spanning tree with the root.
2.2. The Mathematical Model of Leader-Following MASs
Consider the MASs consist of one leader and
N followers, and each agent suffers from the ROUs, RONs and external disturbance. The dynamics of the
i-th
follower is:
where
is the initial instant and
is the initial value of the
i-th follower.
is the system state,
is the control input and
denotes the external disturbance.
, where
and
Q are suitable constant matrices.
is time-varying matrix and satisfies
.
is a nonlinear function.
and
are used to describe the uncertain information of the system and nonlinearities that may occur randomly (i.e., RONs and ROUs) in practical application, respectively. Additionally, assume that
and
satisfy Assumption 2.
Let
denote the state of the leader, whose dynamic is described as:
where
is the initial value of the leader.
To realize the quasi-consensus of the above MASs, the following impulsive protocol is designed:
where
is the impulsive gain, and
is the Dirac delta function which is used to model the impulsive dynamic [
35].
is the impulsive control sequence generated by the ETM to be designed.
Combining (
1) and (
3), one can obtain that
where
at
is right continuous, with
being assumed.
represents the jump value at
.
Then, according to (
4), we construct the following error system:
where
,
,
.
Let
,
and
be the
N-dimensional vector with all elements equal to one. Using the Kronecker product, the error system (
5) can be rewritten as the following compact form:
2.3. Some Definitions, Lemmas and Assumptions
Definition 1 ([
31]).
The leader-following MASs consist of (1) and (2) is said to achieved quasi-consensus if converges into a bounded set as ,where is called the error bound. Definition 2 ([
36]).
Given a function , define the upper-right-hand Dini derivative of Lemma 1 ([
15]).
For any and , the following inequality holds: Assumption 1. The nonlinear function f in (1) and (2) satisfies the following Lipchitz condition:where , and is a constant matrix. Assumption 2. The time-varying parameters and in system (1) are independent of each other and obey the Bernoulli distribution, meeting the following conditions: and , where . Assumption 3. The communication topology of MASs has a spanning tree with the leader as the root node.
Assumption 4. in (6) is bounded and it satisfies . 3. Main Results
In this section, we derive some sufficient conditions to ensure the quasi-consensus of the considered MASs using ETIC strategy. Additionally, we show that Zeno behavior is excluded. First, the ETM is designed as follows:
where
is the maximum allowable event-trigger interval to be designed;
,
and
.
is the Lyapunov function to be defined with respect to
.
Remark 1. With the help of impulsive control, information transmission in the designed ETM can only activate at triggered instants. In other words, there is no need for any information transmission during the event-triggered interval, which can effectively reduce the communication cost.
Remark 2. Compared with the anti-disturbance ETM in [31], where the effects of disturbances are hidden in some parameters, they are intuitive in our designed ETM. The sensitivity of the ETM (9) to disturbances can be adjusted by the parameter υ. Moreover, the measuring error, i.e., for any , used in [31] is no longer needed, which can also cut down the communication or computing resources in some sense. Remark 3. The forced impulse generated by the event is to ensure the existence of the maximum allowable event-trigger interval. Note that it is important for achieving quasi-consensus of MASs, since one can always derive an upper bound of by the following theorem.
Theorem 1. Suppose that Assumptions 1–4 are satisfied. If there exist constants such thatwhere Then, under the impulsive controller (3), the leader-following MASs consisting of (1) and (2) achieve quasi-consensus with the estimated error bound: Proof.
Select the following Lyapunov function:
The derivative of (
11) along (
6) can be obtained:
According to Lemma 1 and Assumption 1, we obtain:
and
Combining (
12)–(
14), we have
When
,
is continuous, the following equation holds:
which indicates that:
where
, and
. Then, integrating both sides of (
16), for
, one has
When
,
, we have
where
.
In the following, we show the boundedness of the selected Lyapunov function by mathematical induction.
For
, it follows from (
18) that:
According to (
18), for
, we can further obtain the following inequality:
Similarly, for
, we have:
and for
, we have
By iteration calculation, for
, we can finally obtain that
Note that
, according to Definition 2 and (
23), for any
, the following inequality holds:
where
is used and
denotes the number of events in
.
Since
(see (
10)), then
According to Definition 1 and (
25), the MASs (
1) and (
2) realize the quasi-consensus under the ETIC protocol (
3), and
. The proof is completed. □
Remark 4. Note that the RONs and ROUs are assumed to exist synchronously in the above systems, but this assumption is further relaxed. Suppose the randomly occurring terms of each follower and the leader are asynchronous. In that case, instead of and modeled in the above systems, there exist some and for any , such that they can be different and independent of each other but satisfy the Bernoulli distribution with and . Then, we can always set and . We have slightly abused the notation by using and to denote both scale-valued and matrix-valued. Clearly, Theorem 1 can still handle this asynchronous case when slightly modified.
Next, we exclude Zeno behavior.
Theorem 2. For MASs (1) under control protocol (3), the parameters of ETM (9) satisfy:then, the interval of event-trigger impulsive control exists clearly, and as . In other words, there is no Zeno behavior for MASs (1) under the event-trigger mechanism (9). Proof.
The following proof is divided into three scenarios according to the characteristics of the designed ETM (
9). Assume that
is the generated impulsive sequence by ETM (
9).
Scenario 1: completely consists of forced impulses
In this scenario, Zeno behavior is excluded naturally since .
Scenario 2: is completely independent of forced impulses
Once any event is triggered, it follows from (
9) and (
17) that
In this scenario, we further discuss the effects caused by , as shown in the following three cases: , and .
Case 1:. It follows from (
28) that
which implies that
.
(i). Note that
and
with
, and thus
. By simple deduction, it follows from (
26) and (
27) that
(ii). When
, we obtain
, i.e.,
, thus
. When
, we obtain
, thus
. If (
26) and (
27) are held, we have
as
when
.
Case 2:. It follows from (
28) that
which implies that
.
(i), i.e., . We can obtain , .
(ii). When
, we have
, i.e.,
, thus
; when
, we have
, thus
. According to (
26) and (
27), we can obtain
as
when
.
Case 3:. It follows from (
28) that
which implies that
.
(i), i.e., , we have .
(ii). Since
, thus
, i.e.,
. We have
, from which (
27).
Based on the above discussion, for any , Zeno behavior is excluded in this scenario and as .
Scenario 3: is generated by both forced impulses and other events
In this scenario, suppose that
is the Zeno time and there exist infinitely many events which happened in the interval
with
, where
. With the assumption above, there then exists, and only exists, one impulse as the forced impulse, and we assume that it occurs at
. Hence, impulses are generated by
in (
9) for any
. However, one can obtain the fact that Zeno behavior is excluded in Scenario 2, and thus, it is a contradiction. Therefore, Zeno behavior is also excluded in this scenario.
The proof is completed. □
Remark 5. Under the impulsive controller (3) and ETM (9), Theorem 1 gives the sufficient conditions for quasi-consensus of MASs, and Theorem 2 gives the sufficient conditions for no Zeno behavior of MASs. In the ETM (9), it should be noted that the changes of , λ and υ affect the trigger interval. and υ may affect the boundedness of , and λ is the attenuation index of the two trigger times. Furthermore, one can observer that the effect of and λ are opposite: if we choose a bigger value of , then the trigger interval is enlarged, which leads to fewer trigger instants, while if we choose a bigger value of λ, then the trigger interval becomes smaller and the trigger instants increase as well. Remark 6. Additionally, based on (10), the maximum allowable event-trigger interval can also be different at each event-triggered interval as the one considered in [31], i.e., the forced impulse is generated by the event , where with . Similarly, the Zeno behavior can also be excluded because it is naturally avoided by the above condition in Scenario 1 while setting in Scenario 3. 4. Numerical Examples
This section verifies the main results through a simulation example.
Consider the leader-following MASs, which consist of one leader and four followers; their topology is shown as
Figure 1. According to
Figure 1, we have:
It is assumed that the MASs model is described as (
1) and (
2). Moreover, let
, and thus
. The controller
is designed as (
3). Choosing
.
, where
, and
In addition, setting
and we have
.
Let the initial value of the leader and four followers be as follows:
Selecting
and
, one can obtain that
and
. Then, we choose
, and
. Hence, the conditions in Theorem 1 are satisfied, and the quasi-consensus can be achieved with the error bound
. Moreover, setting
and
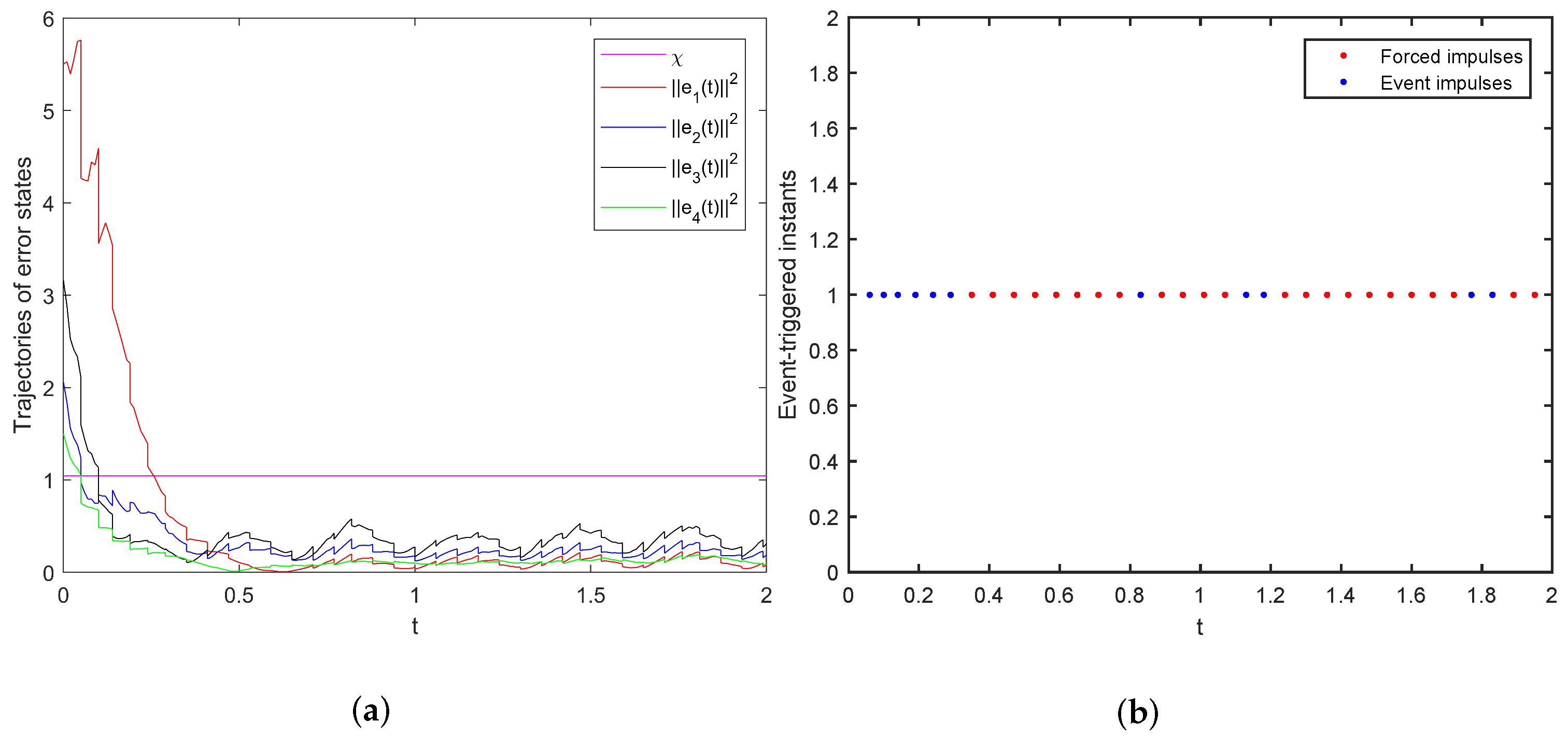
, one can check that conditions in Theorem 2 are also met, and Zeno behavior can be excluded. Let
, the trajectories of error states and event-triggered instants under ETM (
9) are shown as
Figure 2a,b, respectively.
To highlight the superiority of the obtained results in this paper, the results (Theorem 2) in [
31] are considered, where their ETM is designed as follows (the fixed maximum allowable event-trigger interval
case is considered):
where
and
.
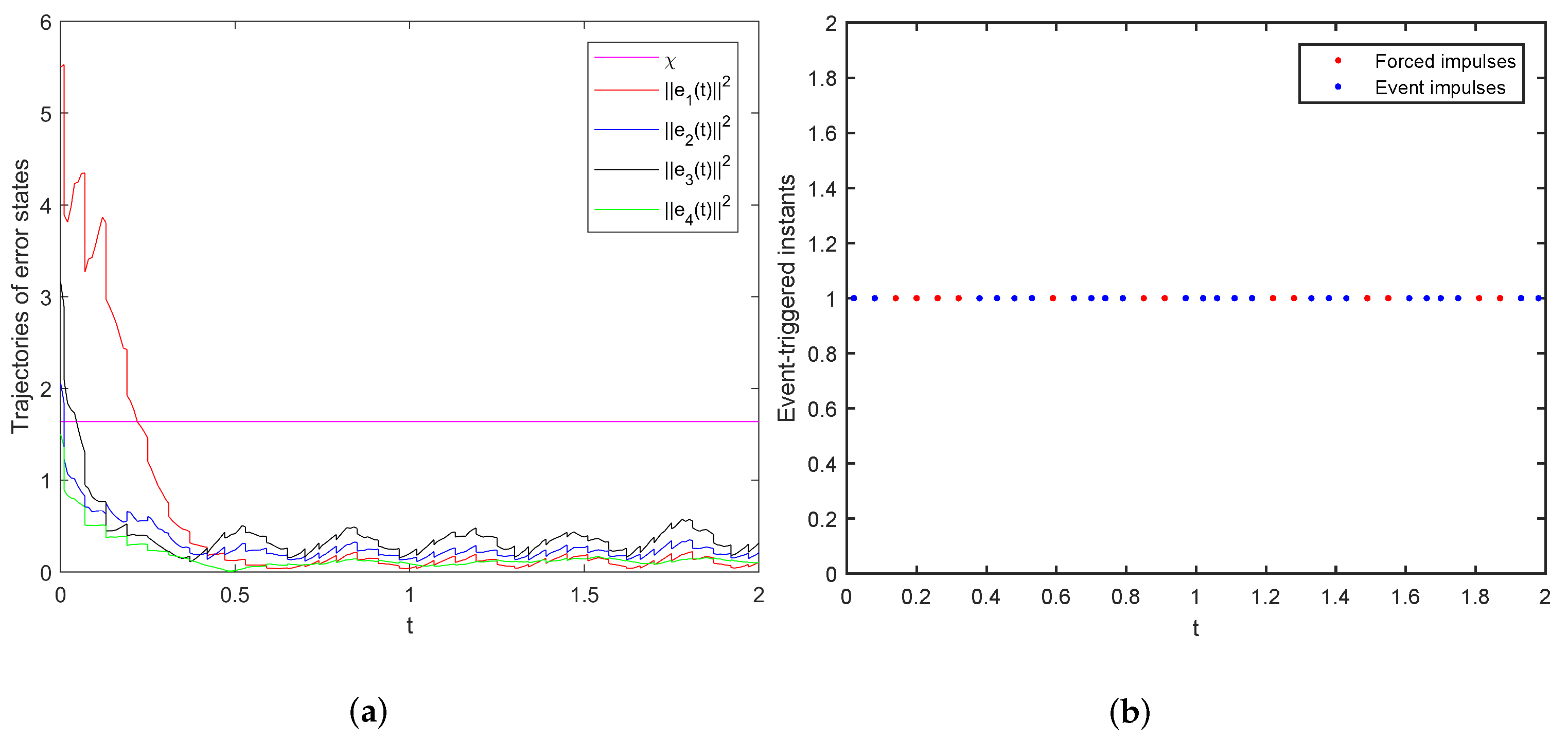
Neglecting the delay considered in [
31], a set of feasible solutions for LMIs in (Theorem 2 in [
31]) are obtained by setting
and
. Then, one has
and
with
. Choose
and
; it is calculated that the error bound under (
33) is
with
and
. With the parameters above, the trajectories of error states and event-triggered instants under ETM (
9) are shown as
Figure 3a,b, respectively.
Compared with the performance of both ETM (
9) and (
33), one can find that the error bound
is smaller, and the triggered instants are fewer under ETM (
9) than those under ETM (
33). Hence, less conservative results can be obtained with the ETM designed in this paper.
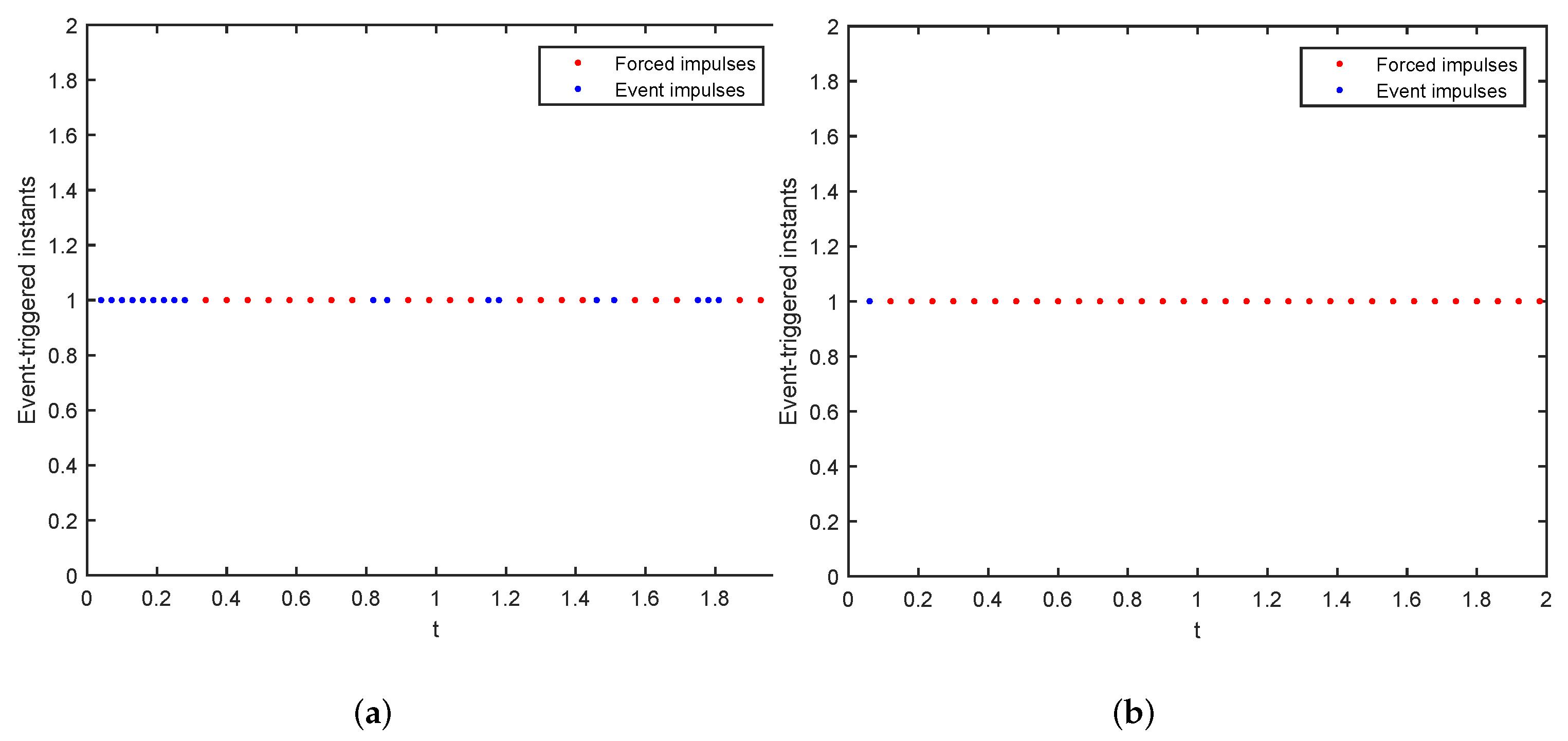
Setting
and
, the event-triggered instants of the system are shown as
Figure 4a,b, respectively. By assigning different values of the parameter
, we can obviously observe that the larger
leads to more event-triggered instants generated by
.
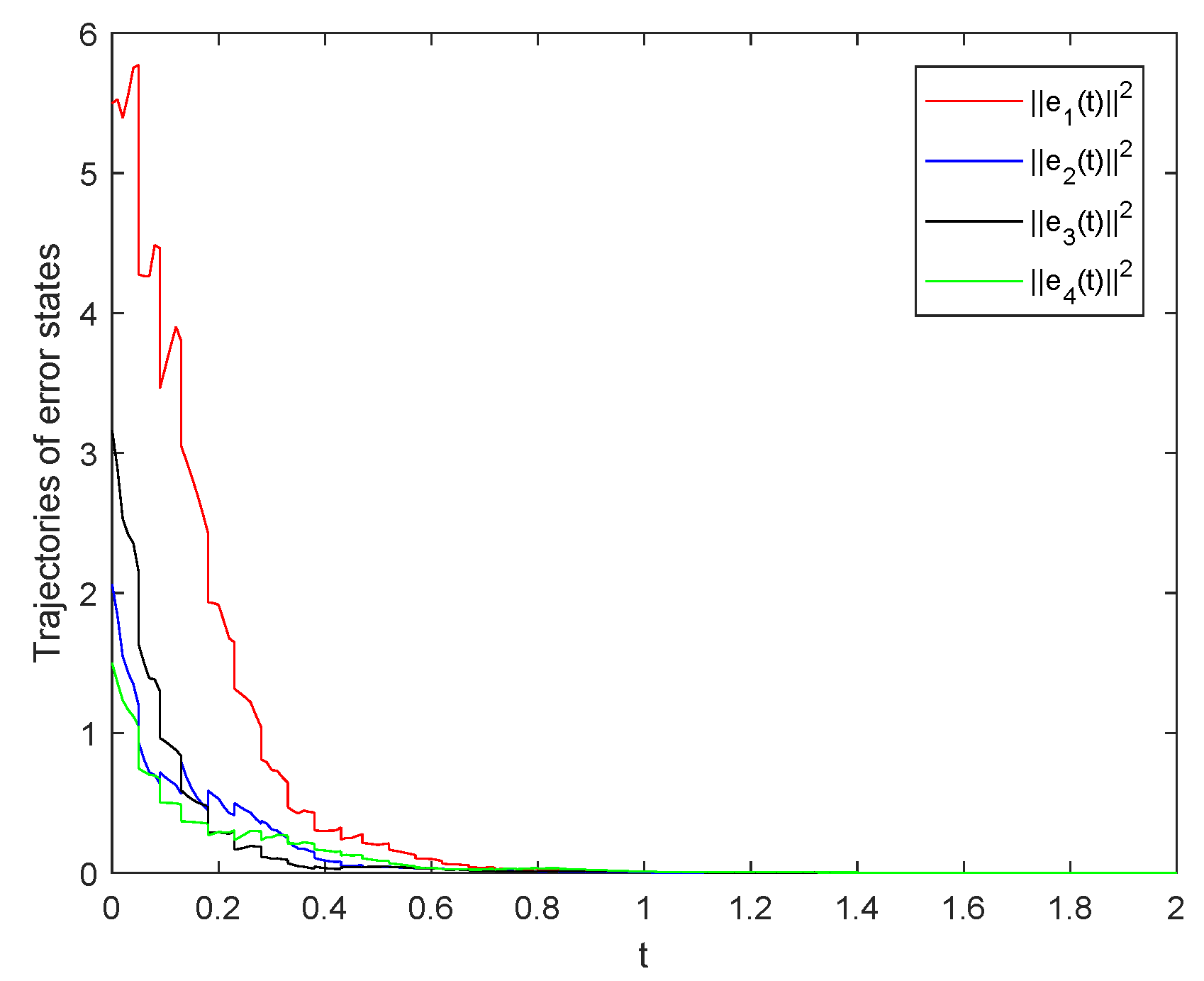
Moreover, when the external disturbances are ignored (
), the consensus can be achieved as shown in
Figure 5, i.e., the case that
in Definition 2.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}