Algorithm for Locating the Datum Strand of a Suspension Bridge Considering the Influence of Friction and the Change in Tangent Point of the Cable Saddle


Abstract
:1. Introduction
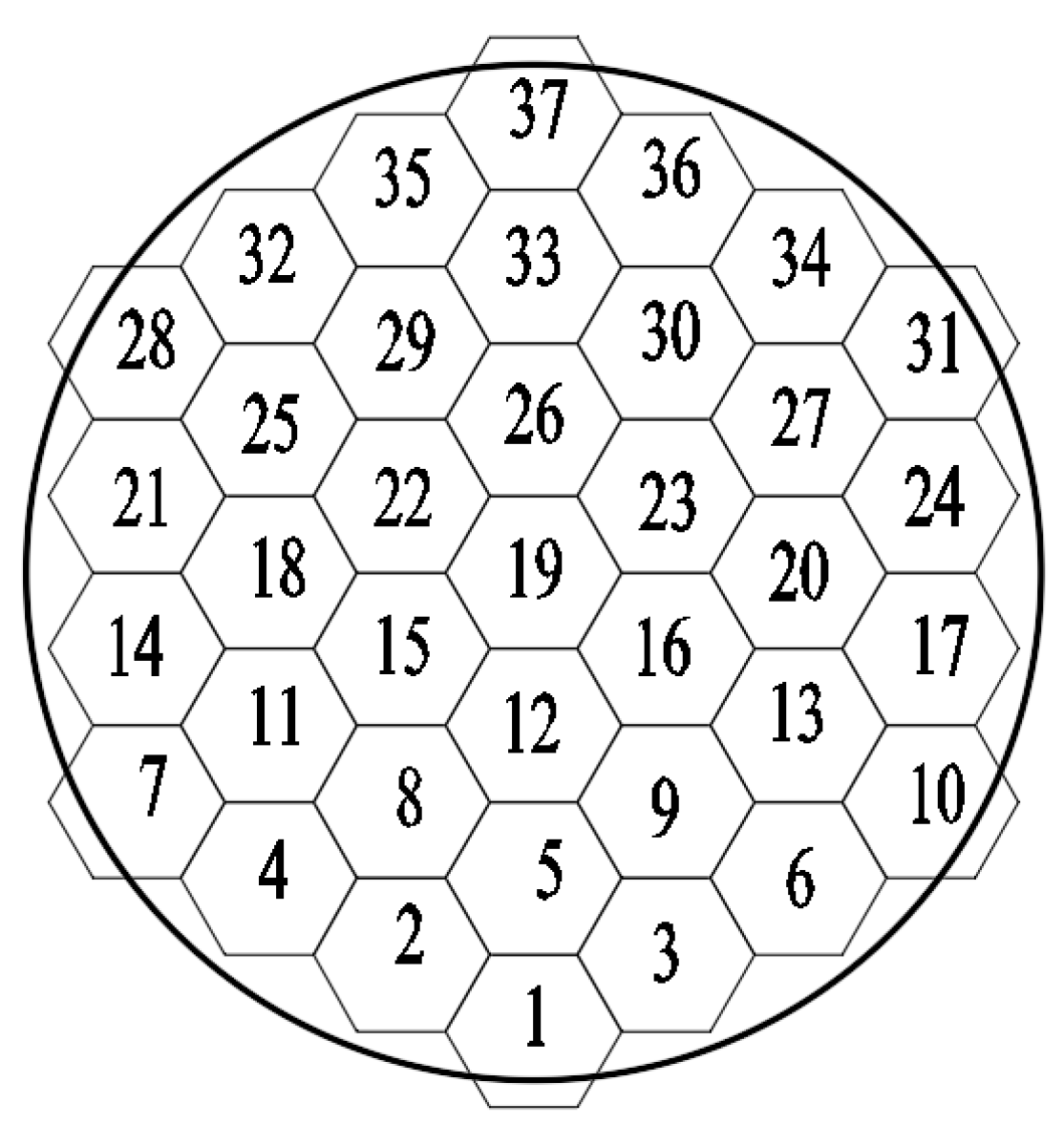
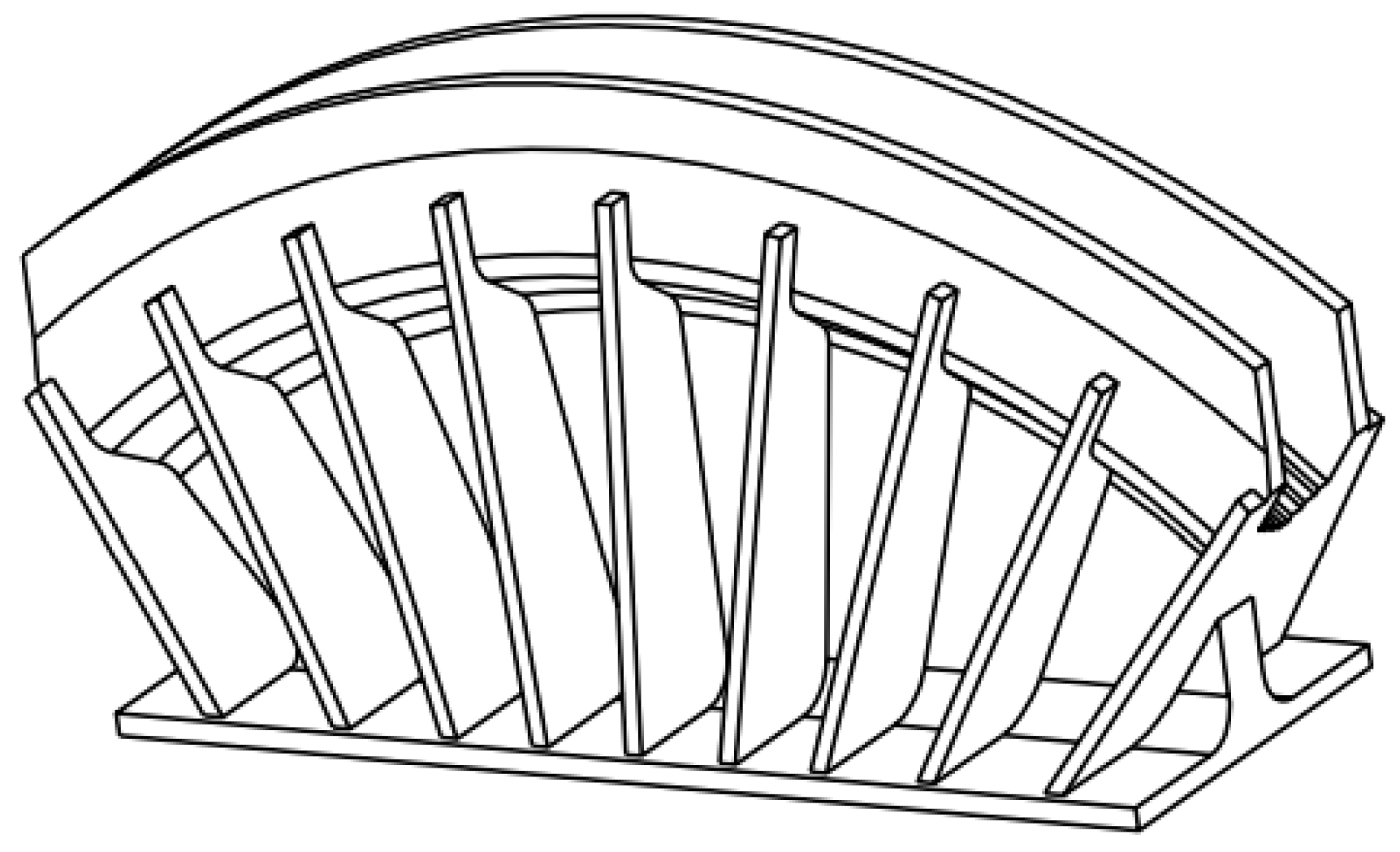
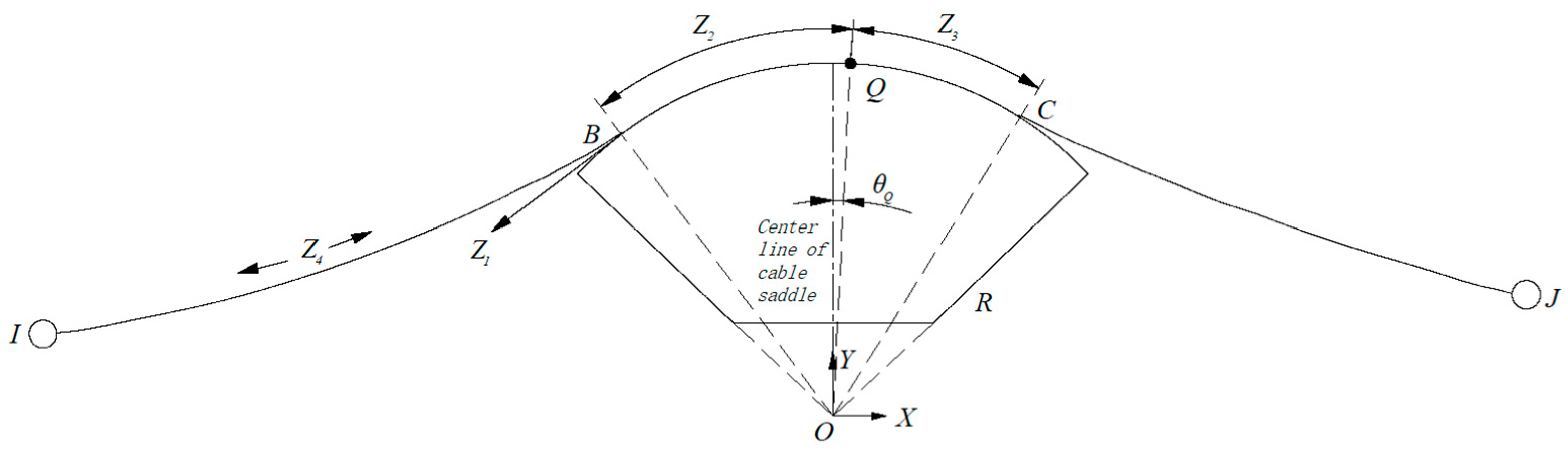
2. Friction between Main Cable and Saddle
2.1. Determination of Nominal Friction Coefficient
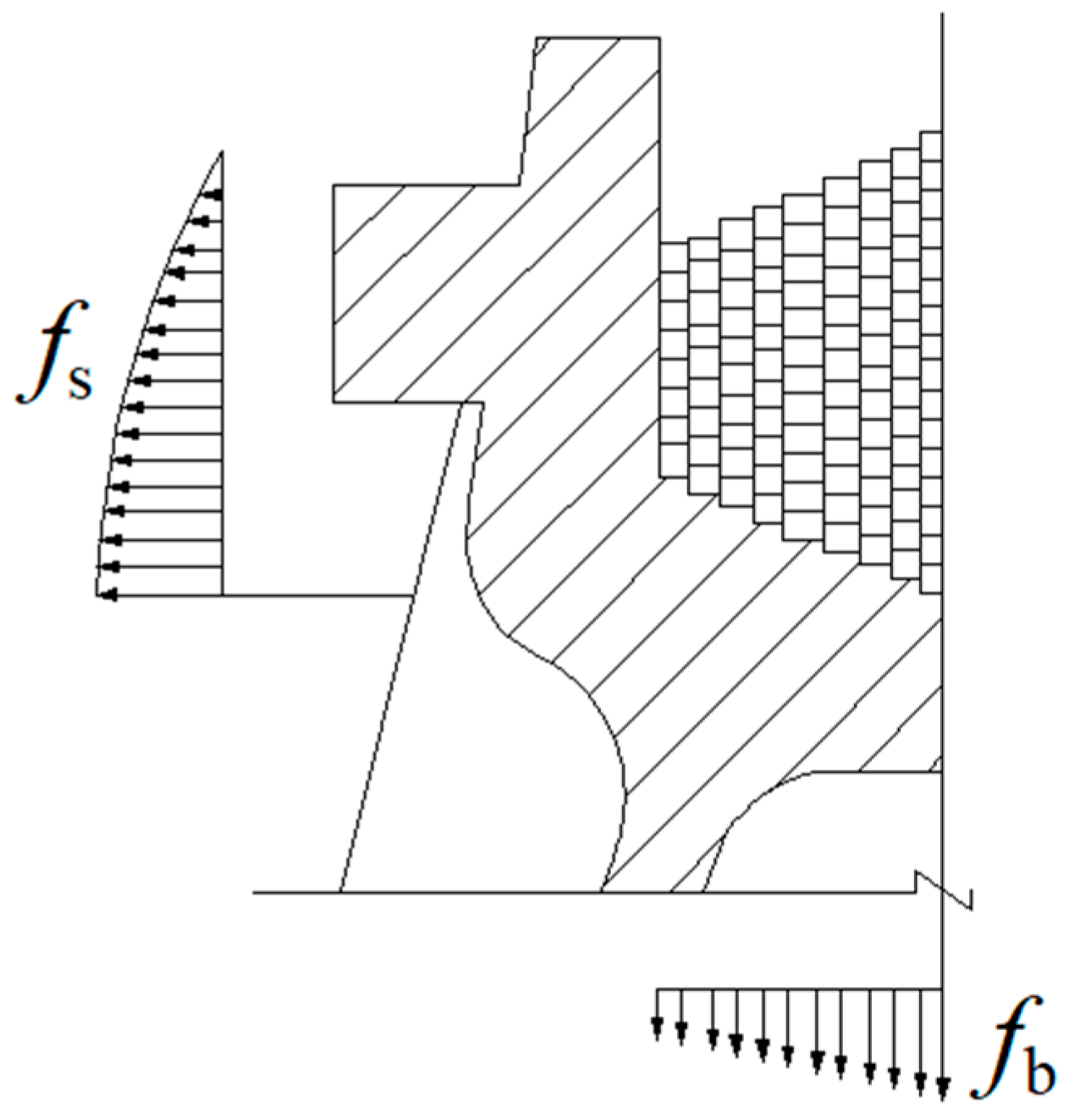
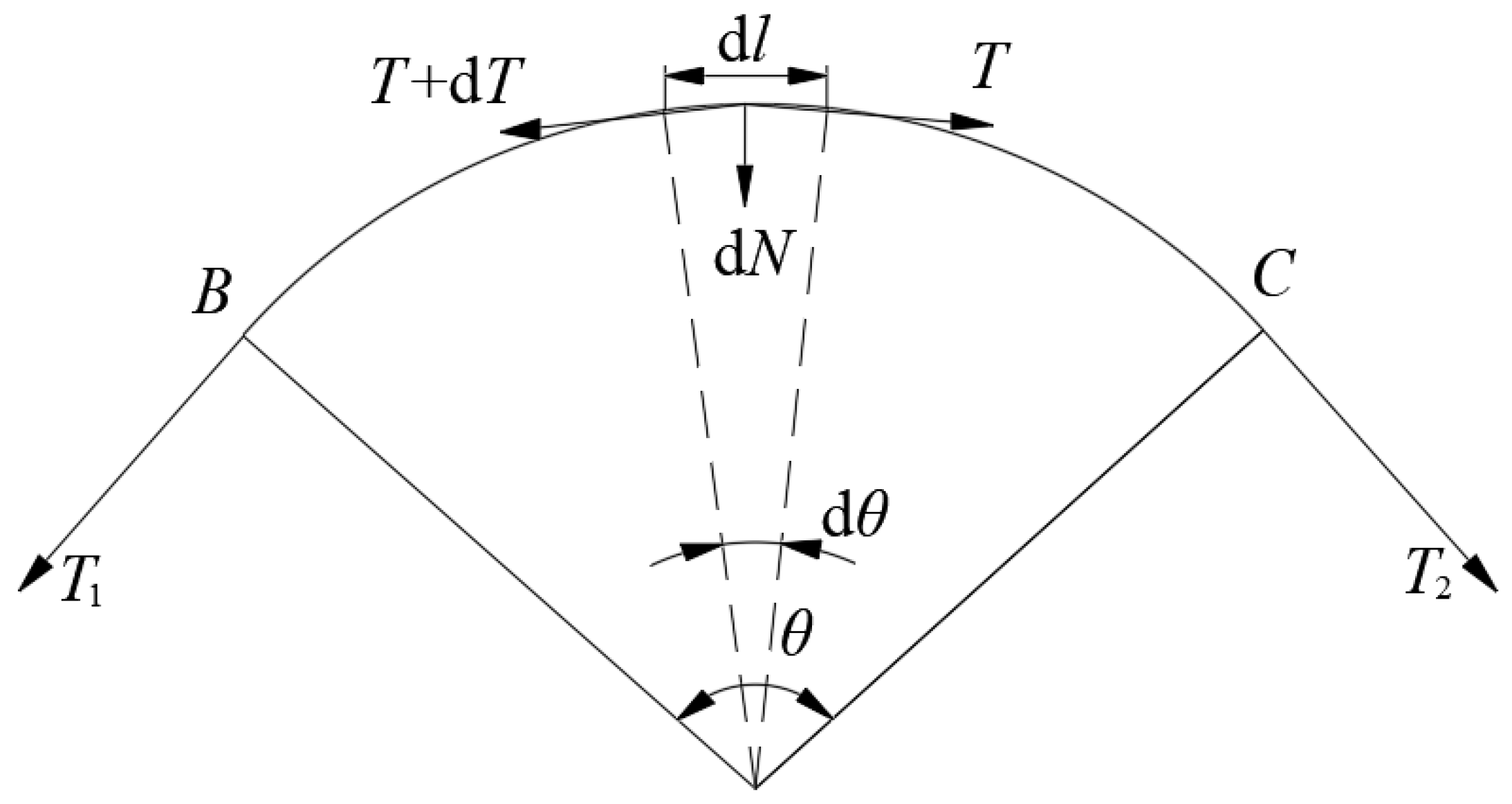
2.2. Determination of Friction
3. Calculation of Cable Saddle Position
3.1. Basic Assumptions
- (1)
- The main cable is perfectly flexible and can neither be compressed nor bent.
- (2)
- The material of the main cable conforms to Hooke’s law, and its stress–strain relationship is linear.
- (3)
- The cross-section area of the main cable changes little under the external load, and the influence of the small change is ignored in the calculation.
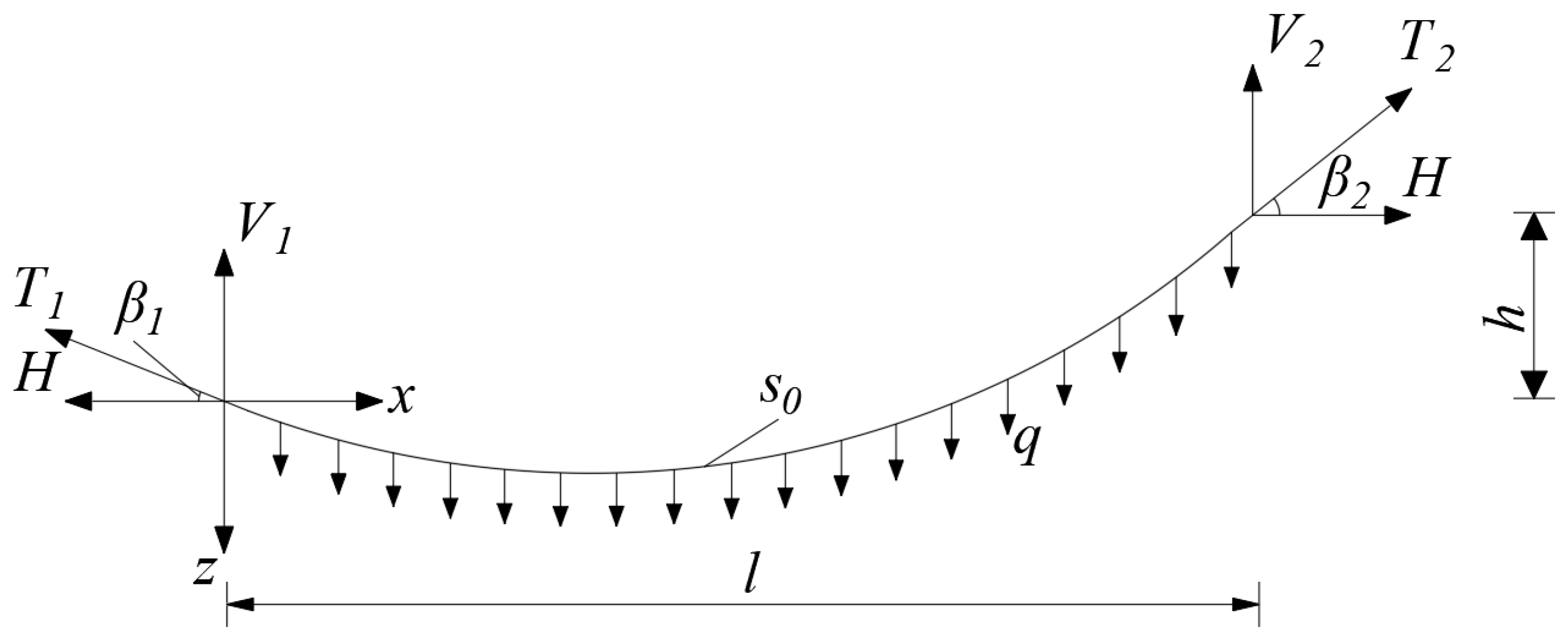
3.2. Basic Formula of Cable Element Expressed by Cable End Force
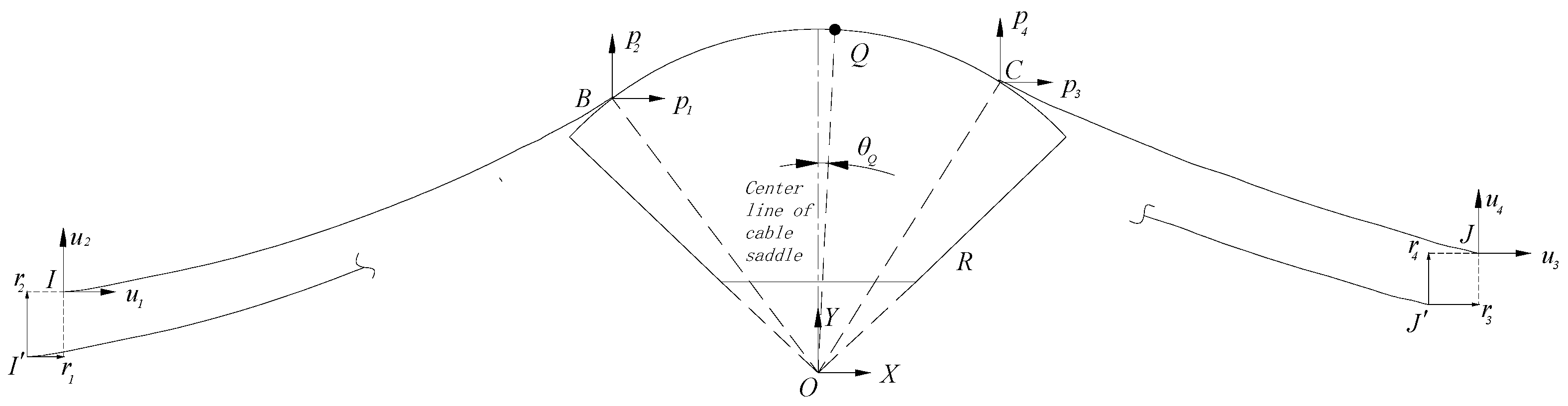
3.3. Determination of Cable Saddle Position
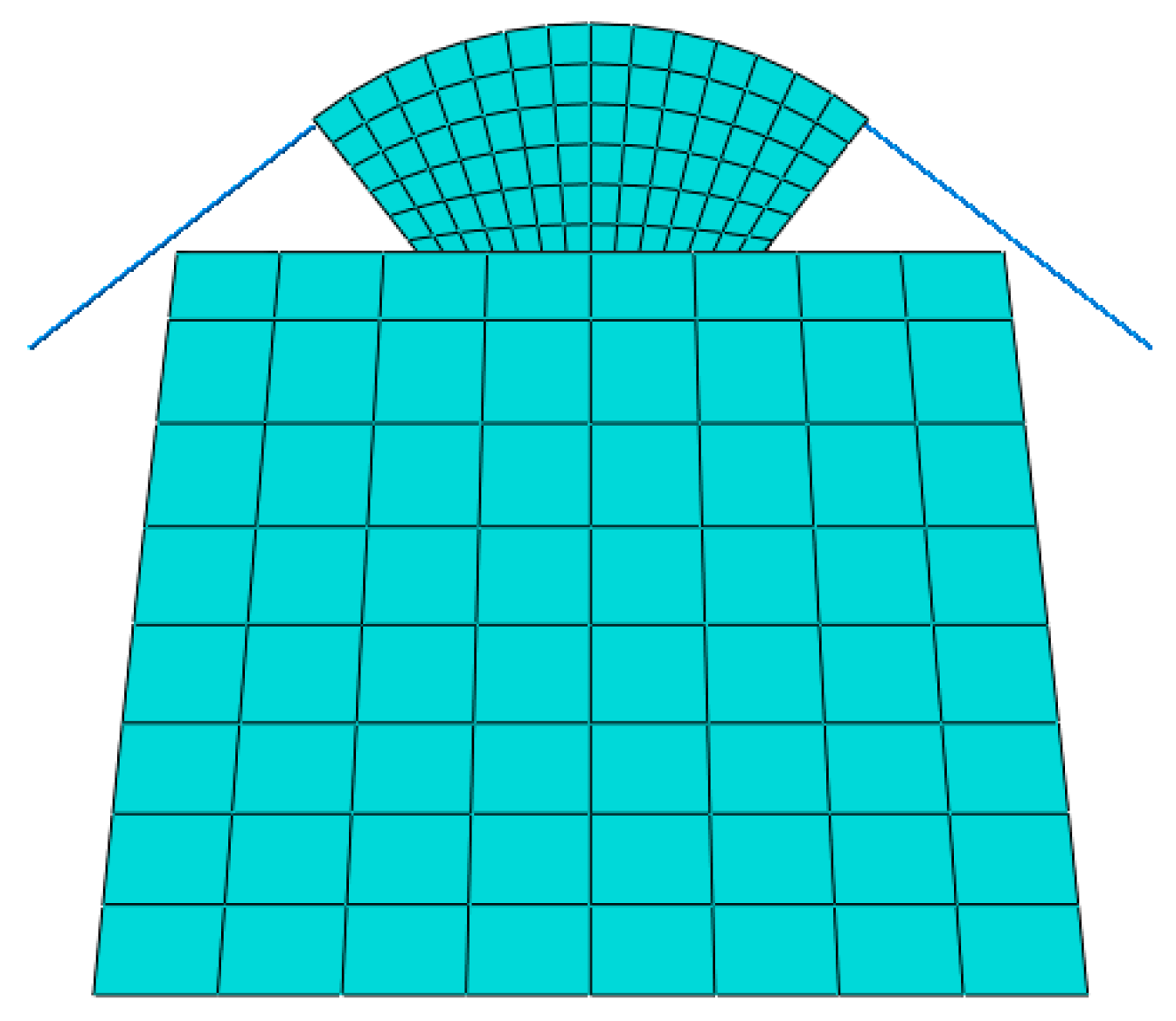
4. Exact Solution of Catenary Strand Shape Considering Change in Tangent Point
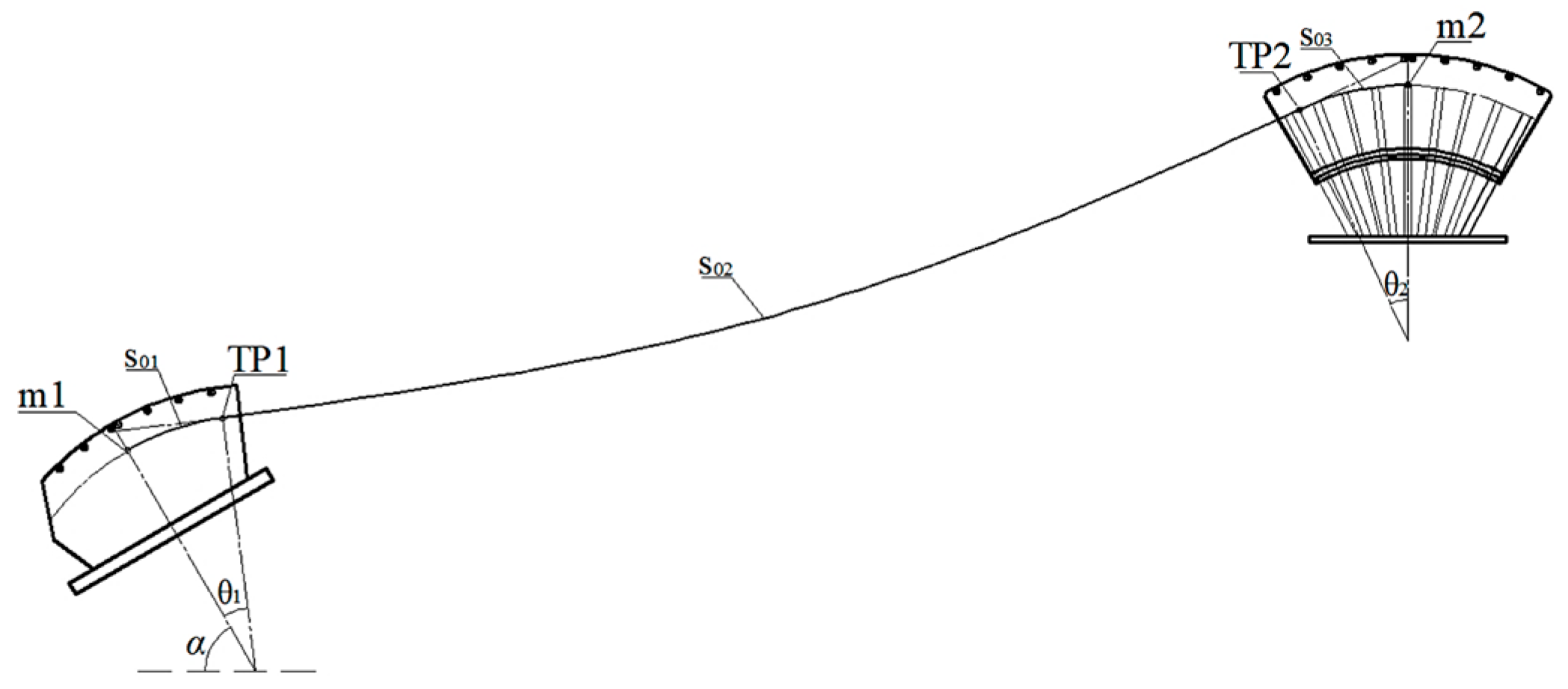
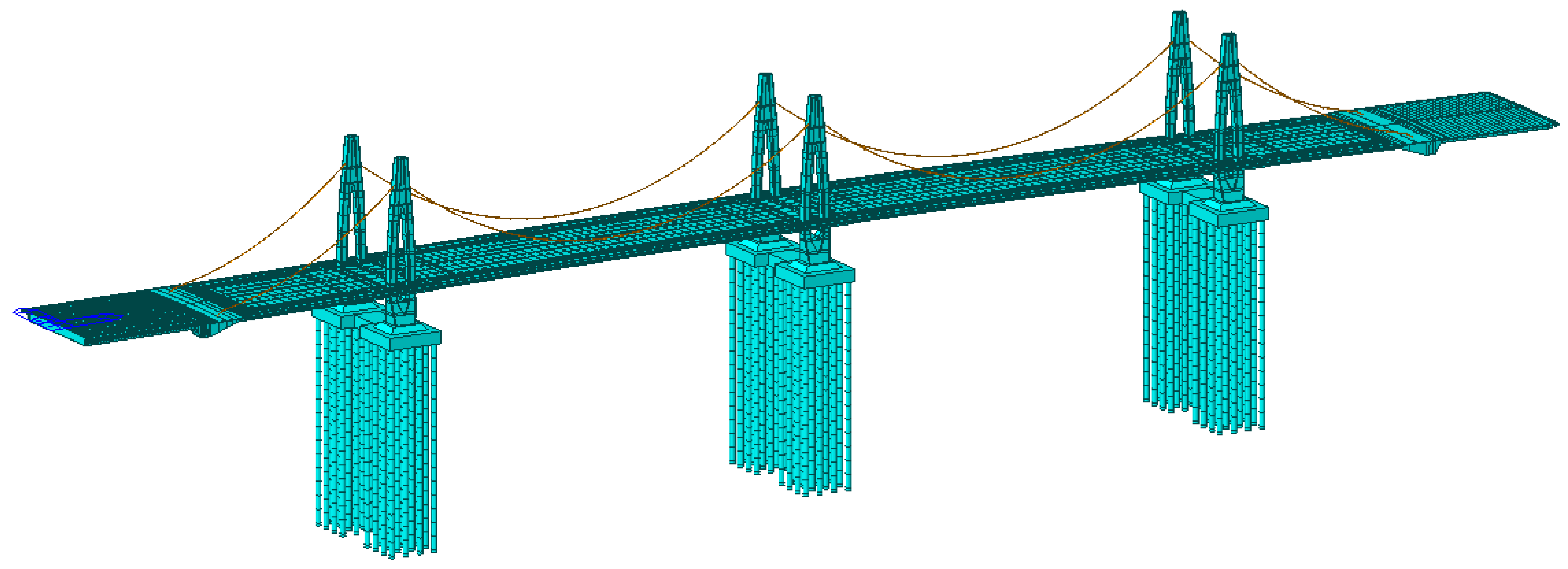
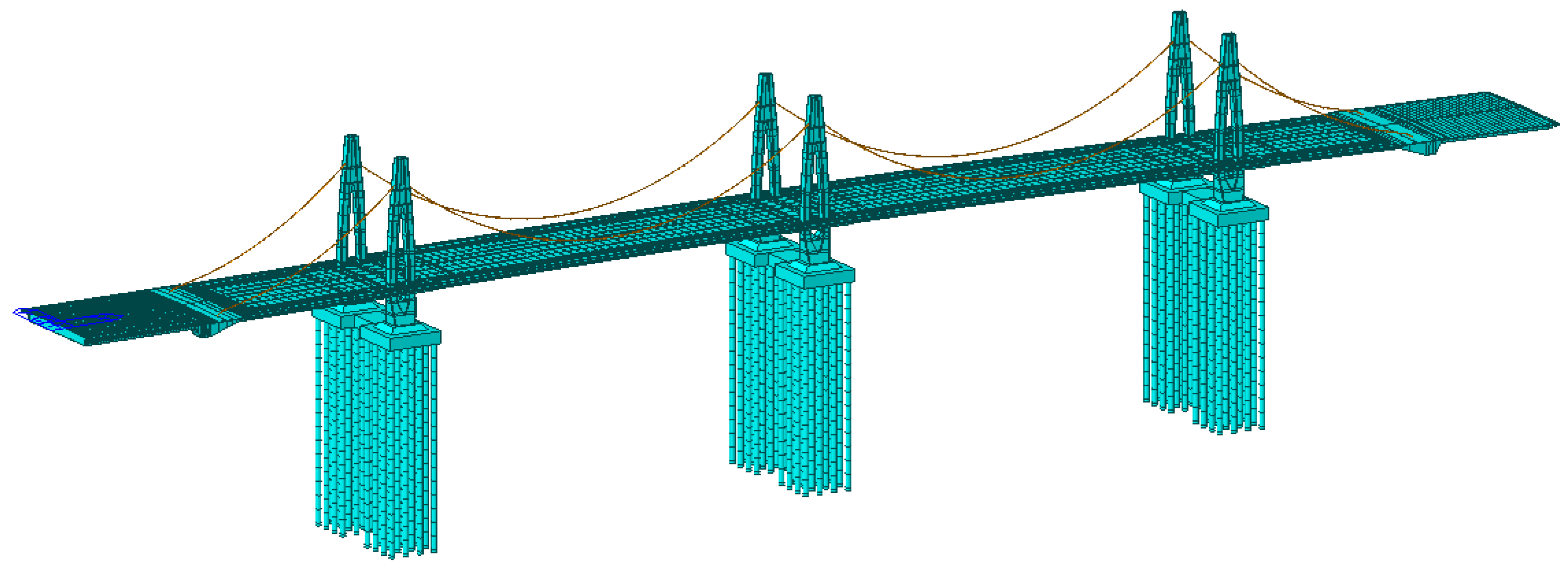
5. Example Verification
6. Conclusions
- (1)
- Based on Euler formula and Hooke’s law, the formula for calculating the friction resistance of the main cable and cable saddle, considering the position change in the cable saddle, is derived. Based on the elastic catenary theory, a deviation algorithm considering the friction between the main cable and saddle is proposed by introducing a group of independent variables. The algorithm has fast convergence speed and high calculation accuracy.
- (2)
- On the condition that the pre-deflection of the cable saddle is determined, the tangent point of the cable strand in the saddle groove is obtained by iterative calculation. Then, according to the calculation model of the catenary strand, the coordinates of any point of strand are determined, and the strand shape, considering the influence of friction, can be obtained.
- (3)
- The parameter analysis of the cable strand line and friction coefficient shows that the elevation of cable strand changes linearly with the linear change in friction resistance, and the change amount is small (the influence is millimeter level), and the influence of friction resistance can be ignored in a simplified calculation.
- (4)
- This algorithm is suitable for the accurate calculation of the saddle position of a plane cable plane suspension bridge. The accurate calculation of the saddle position of a space cable plane suspension bridge will be the focus of the next stage.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, S.H. Theory and Calculation Method of Bridge Structures; China Communications Press: Beijing, China, 2017. [Google Scholar]
- Zhang, W.M.; Li, T.; Shi, L.Y.; Liu, Z.; Qian, K.R. An iterative calculation method for hanger tensions and the cable shape of a suspension bridge based on the catenary theory and finite element method. Adv. Struct. Eng. 2019, 22, 1566–1578. [Google Scholar] [CrossRef]
- Wang, S.R.; Zhou, Z.X.; Wen, D.; Huang, Y.Y. New Method for Calculating the Preoffsetting Value of the Saddle on Suspension Bridges Considering the Influence of More Parameters. J. Bridge Eng. 2016, 21, 9. [Google Scholar] [CrossRef]
- Jia, L.J.; Lin, Z.B.; Xiao, R.C.; Jiang, Y. Parameter effects on the mechanical performance of triple-tower four-span suspension bridges. Adv. Struct. Eng. 2018, 21, 256–269. [Google Scholar] [CrossRef]
- Jia, L.J.; Zhang, C.; Jiang, Y.; Cheng, J.; Xiao, R.C. Simplified Calculation Methods for Static Behaviors of Triple-Tower Suspension Bridges and Parametric Study. Int. J. Steel Struct. 2018, 18, 685–698. [Google Scholar] [CrossRef]
- Ruan, X.; Zhou, J.Y.; Caprani, C.C. Safety Assessment of the Antisliding between the Main Cable and Middle Saddle of a Three-Pylon Suspension Bridge Considering Traffic Load Modeling. J. Bridge Eng. 2016, 21, 10. [Google Scholar] [CrossRef]
- Pevrot, A.H.; Goulois, A.M. Analysis of cable structures. Comput. Struct. 1979, 10, 805–813. [Google Scholar] [CrossRef]
- Luo, X.H. Effect of saddle on cable shape of suspension bridges. J. Highw. Transp. Res. Dev. 2005, 8, 36–39+48. [Google Scholar]
- Li, C.X.; Wang, L.; Liu, G.D.; Chen, M.X.; Xiao, Y.G. Separate calculation method on suspension bridge saddle’s position. China J. Highw. Transp. 2005, 1, 67–72. [Google Scholar]
- Wang, S.R.; Zhou, Z.X.; Gao, Y.M.; Xu, J. Newton-Raphson algorithm for pre-offsetting of cable saddle on suspension bridge. China J. Highw. Transp. 2016, 29, 82–88. [Google Scholar]
- Cheng, J.; Xu, H.; Xu, M.S. Study on midtower longitudinal stiffness of three-tower four-span suspension bridges with steel truss girders. Struct. Eng. Mech. 2020, 73, 641–649. [Google Scholar]
- Cheng, Z.Y.; Zhang, Q.H.; Bao, Y.; Jia, D.L.; Bu, Y.Z.; Li, Q. Analytical Models of Frictional Resistance between Cable and Saddle Equipped with Friction Plates for Multispan Suspension Bridges. J. Bridge Eng. 2018, 23, 13. [Google Scholar] [CrossRef]
- Han, S.H.; Zhang, Q.H.; Bao, Y.; Cheng, Z.Y.; Jia, D.L.; Bu, Y.Z. Frictional Resistance Between Main Cable and Saddle for Suspension Bridges. II: Interlayer Slip of Strands. J. Bridge Eng. 2020, 25, 04020043. [Google Scholar] [CrossRef]
- Niu, Y.W.; Rong, S.; Qu, X.X.; Zhao, Y.; Huang, P.M. Simulation of Friction Between Cable and Subwire Tube in Saddle Type Anchorage of Low-Tower Cable-Stayed Bridge. J. Balk. Tribol. Assoc. 2015, 21, 1087–1099. [Google Scholar]
- Wang, B.J.; Li, Q.B.; Liu, T.Y.; Peng, W.B. Analysis of Cable under Dynamic Contact and Large Deformation. Ksce J. Civ. Eng. 2019, 23, 1626–1635. [Google Scholar] [CrossRef]
- Wang, L.; Shen, R.L.; Ma, N.J.; Zhang, S.H.; Gu, L.X.; Wang, R.H. Discrete analytical model for lateral mechanical behavior of cable-saddle system in suspension bridges. Eng. Struct. 2020, 221, 13. [Google Scholar] [CrossRef]
- Wang, L.; Shen, R.L.; Wang, C.J.; Zhang, S.H.; Wang, Y. Theoretical and Experimental Studies of the Antislip Capacity between Cable and Saddle Equipped with Horizontal Friction Plates. J. Bridge Eng. 2019, 24, 15. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Cheng, Z.Y.; Cui, C.; Bao, Y.; He, J.; Li, Q. Analytical Model for Frictional Resistance between Cable and Saddle of Suspension Bridges Equipped with Vertical Friction Plates. J. Bridge Eng. 2017, 22, 12. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Guo, H.L.; Bao, Y.; Cheng, Z.Y.; Jia, D.L. Antislip Safety of Double-Cable Multispan Suspension Bridges with Innovative Saddles. J. Bridge Eng. 2020, 25, 12. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Han, S.H.; Bao, Y.; Cheng, Z.Y.; Jia, D.L.; Bu, Y.Z. Frictional Resistance between Main Cable and Saddle for Suspension Bridges. I: Friction Characteristic of Single Strand. J. Bridge Eng. 2020, 25, 04020042. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Kang, J.P.; Bao, Y.; Cheng, Z.Y.; Jia, D.L.; Bu, Y.Z. Numerical study on cable-saddle frictional resistance of multispan suspension bridges. J. Constr. Steel. Res. 2018, 150, 51–59. [Google Scholar] [CrossRef]
- He, S.H.; Chen, Y.H.; Li, Y. Exact algorithm for cable saddle of suspension bridge influences by frictional resistance. J. Chang. Univ. (Nat. Sci. Ed.) 2019, 39, 57–64. [Google Scholar]
- Li, T.; Liu, Z.; Zhang, W. Analysis of suspension bridges in construction and completed status considering the pylon saddles. Eur. J. Environ. Civ. Eng. 2020, 26, 4280–4295. [Google Scholar] [CrossRef]
- Zhang, W.M.; Tian, G.M.; Yang, C.Y.; Liu, Z. Analytical methods for determining the cable configuration and construction parameters of a suspension bridge. Struct. Eng. Mech. 2019, 71, 603–625. [Google Scholar]
- Zhang, W.M.; Tian, G.M.; Liu, Z. Analytical Study of Uniform Thermal Effects on Cable Configuration of a Suspension Bridge during Construction. J. Bridge Eng. 2019, 24, 18. [Google Scholar] [CrossRef]
- Zhang, W.M.; Yang, C.Y.; Tian, G.M.; Liu, Z. Analytical Assessment of Main Cable Shape for Three-Pylon Suspension Bridge with Unequal Main-Span Lengths: Thermal Effect Consideration. J. Bridge Eng. 2020, 25, 14. [Google Scholar] [CrossRef]
- Zhang, W.M.; Yang, C.Y.; Chang, J.Q. Cable Shape and Construction Parameters of Triple-Tower Double-Cable Suspension Bridge with Two Asymmetrical Main Spans. J. Bridge Eng. 2021, 26, 20. [Google Scholar] [CrossRef]
- Zhang, W.M.; Yang, C.Y.; Wang, Z.W.; Liu, Z. An analytical algorithm for reasonable central tower stiffness in the three-tower suspension bridge with unequal-length main spans. Eng. Struct. 2019, 199, 13. [Google Scholar] [CrossRef]
- Liang, Z.L.; Song, Y.F.; Yan, L. Study on positioning and adjusting method of datum strands for suspension bridge. J. Highw. Transp. Res. Dev. 2019, 36, 84–90. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position of Middle Point | Friction Is Not Considered | Friction Is Considered |
|---|---|---|
| The method in this paper | 464.902 69 | 464.903 43 |
| Calculated by finite element | 464.900 25 | 464.901 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Han, H.; Zheng, X.; Chen, Y.; Liang, Z. Algorithm for Locating the Datum Strand of a Suspension Bridge Considering the Influence of Friction and the Change in Tangent Point of the Cable Saddle. Appl. Sci. 2022, 12, 7565. https://doi.org/10.3390/app12157565
Zhou X, Han H, Zheng X, Chen Y, Liang Z. Algorithm for Locating the Datum Strand of a Suspension Bridge Considering the Influence of Friction and the Change in Tangent Point of the Cable Saddle. Applied Sciences. 2022; 12(15):7565. https://doi.org/10.3390/app12157565
Chicago/Turabian StyleZhou, Xiangong, Heng Han, Xiaobo Zheng, Yinghao Chen, and Zhilei Liang. 2022. "Algorithm for Locating the Datum Strand of a Suspension Bridge Considering the Influence of Friction and the Change in Tangent Point of the Cable Saddle" Applied Sciences 12, no. 15: 7565. https://doi.org/10.3390/app12157565
APA StyleZhou, X., Han, H., Zheng, X., Chen, Y., & Liang, Z. (2022). Algorithm for Locating the Datum Strand of a Suspension Bridge Considering the Influence of Friction and the Change in Tangent Point of the Cable Saddle. Applied Sciences, 12(15), 7565. https://doi.org/10.3390/app12157565