
Numerical Analysis and Optimization of the Front Window Visor for Vehicle Wind Buffeting Noise Reduction Based on Zonal SAS k-ε Method


Abstract
:1. Introduction
2. Computational Schemes
3. Methodology and Validity of CFD Simulations
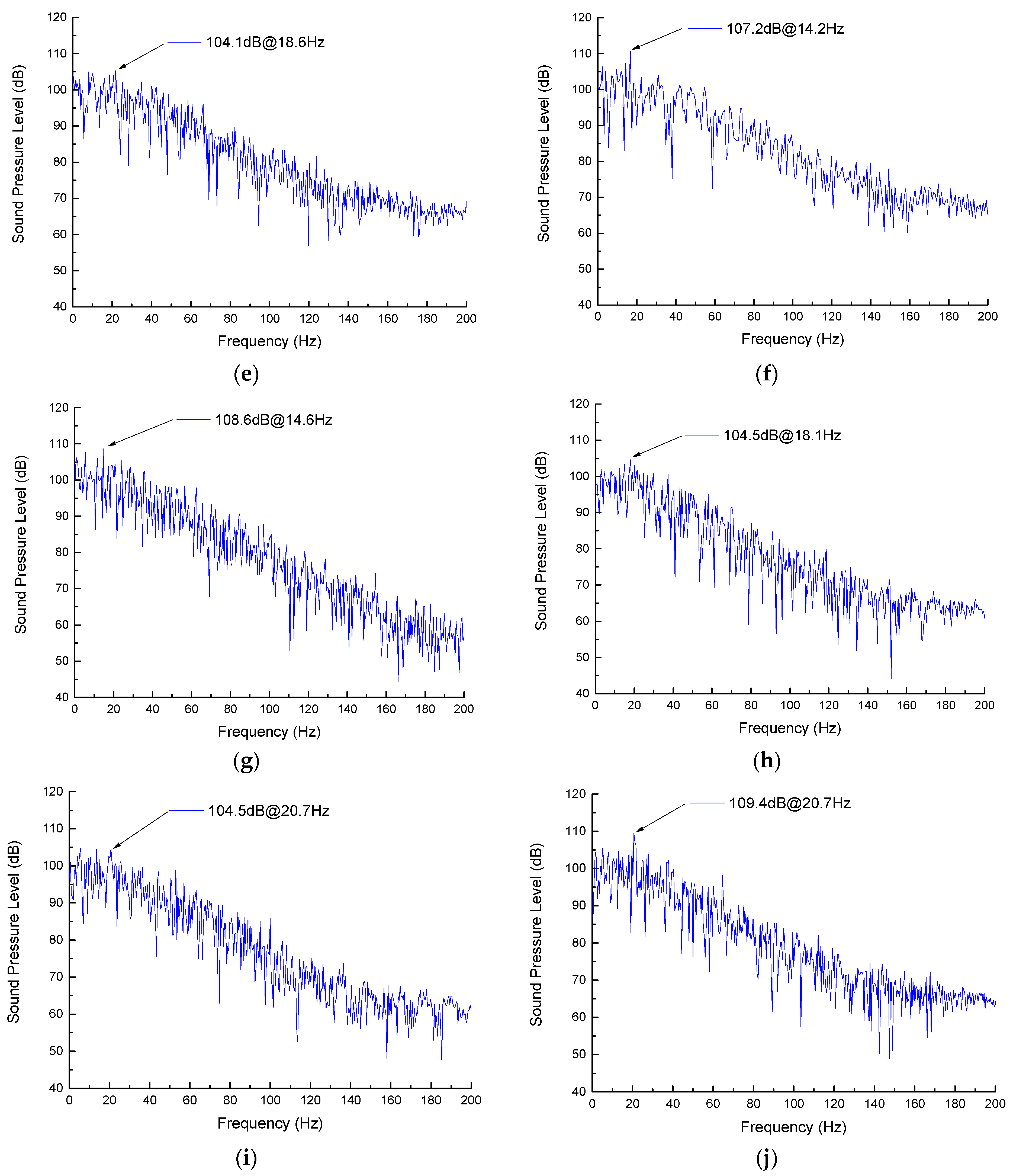
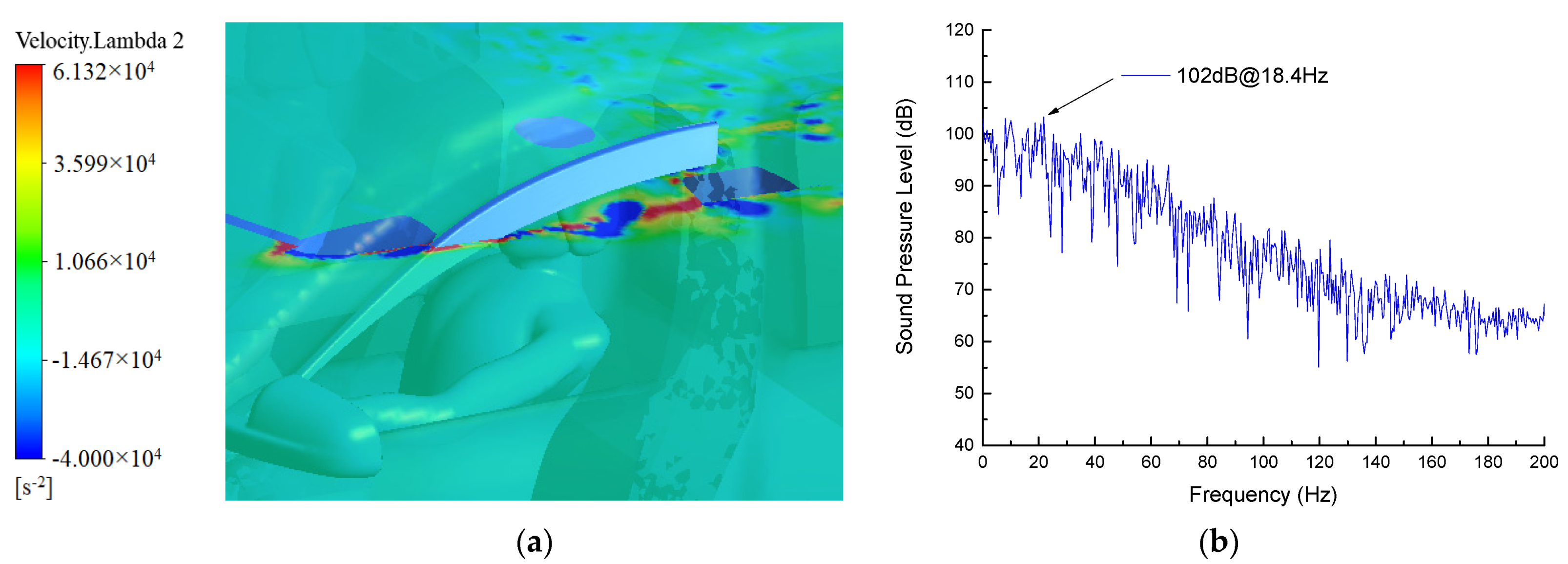
4. Effects of the Rain Visor on the Reduction of the Window Buffeting Noise
5. Optimization of the Rain Visor on the Reduction of the Window Buffeting Noise
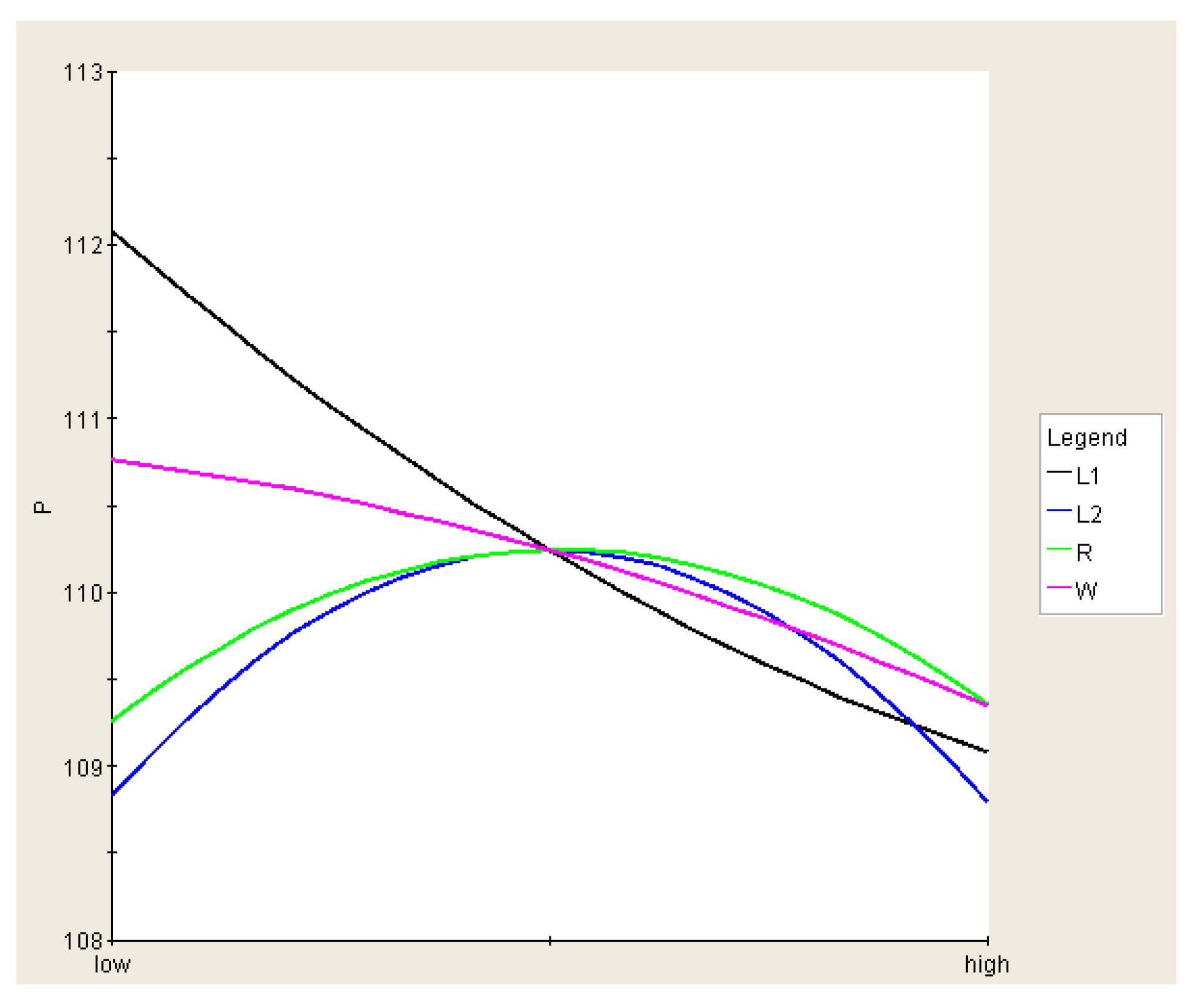
5.1. Design Variables and Constraints
- (1)
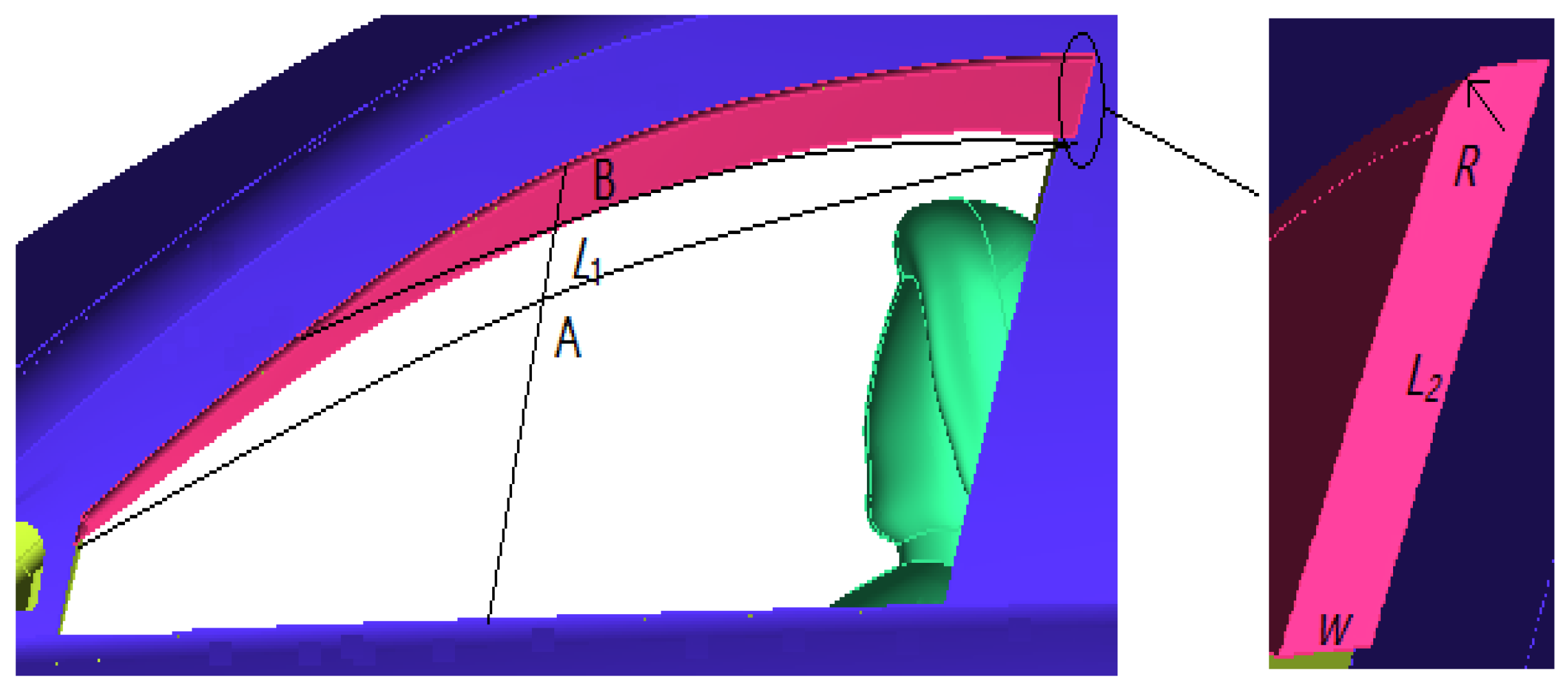
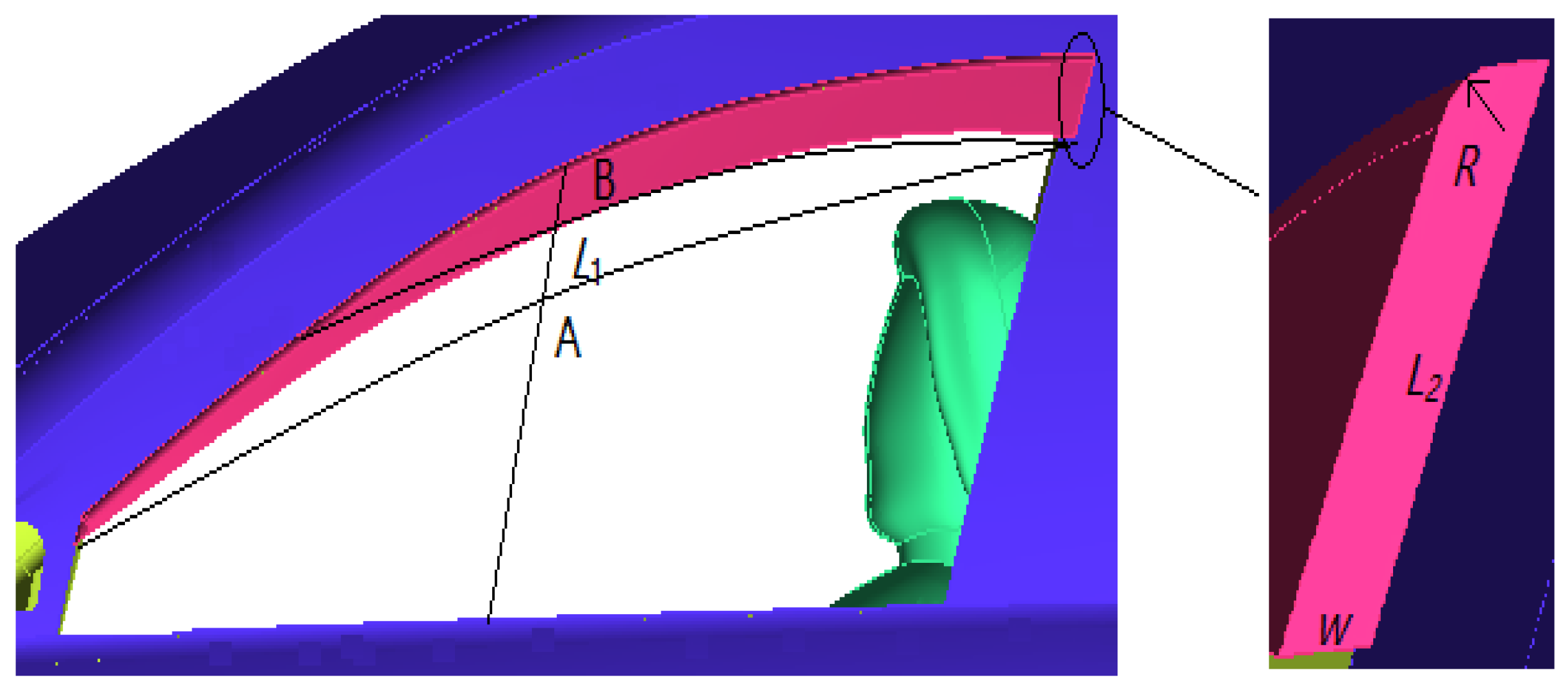
- The design variable L1: Take the midpoint of the upper and lower sides of the front window and make the midline on the window’s curved surface. Make the intersection midline of the two endpoints of the rain visor on the window’s curve at one point, then the curve will be regarded as the edge line of the rain visor, and the intersection point is the radiant point of the rain visor’s edge. Considering the rain shielding effect of the rain visor and the range of visual field of the driver, two points, A and B, are taken as the limit position of the intersection, and the curve between them is L1. Make the position of point B zero, and then the value range of L1 is [0~39 mm].
- (2)
- The design variable W: W is the distance between the lower edge of the visor and the window’s curved surface. The slope of the noise reduction visor’s surface can be controlled by changing the value of W. When the slope of the visor’s surface is greater than 45°, the rain shielding effect will decrease sharply; set the minimum value of W as 20 mm, so the value range of W is [20~36 mm].
- (3)
- The design variable L2: Set the length of the long side of the visor, i.e., the length of the rear side of the B pillar, as L2. According to the requirements of the radian of the window, the value range of L2 is set as [50~65 mm].
- (4)
- The design variable R: The radius of the rounded angle of the visor is set as R. Restricted by the short edge of the visor, the value range of R is set as [0~15 mm].
5.2. Approximate Agent Model
5.3. Global Optimization
6. Conclusions
- (1)
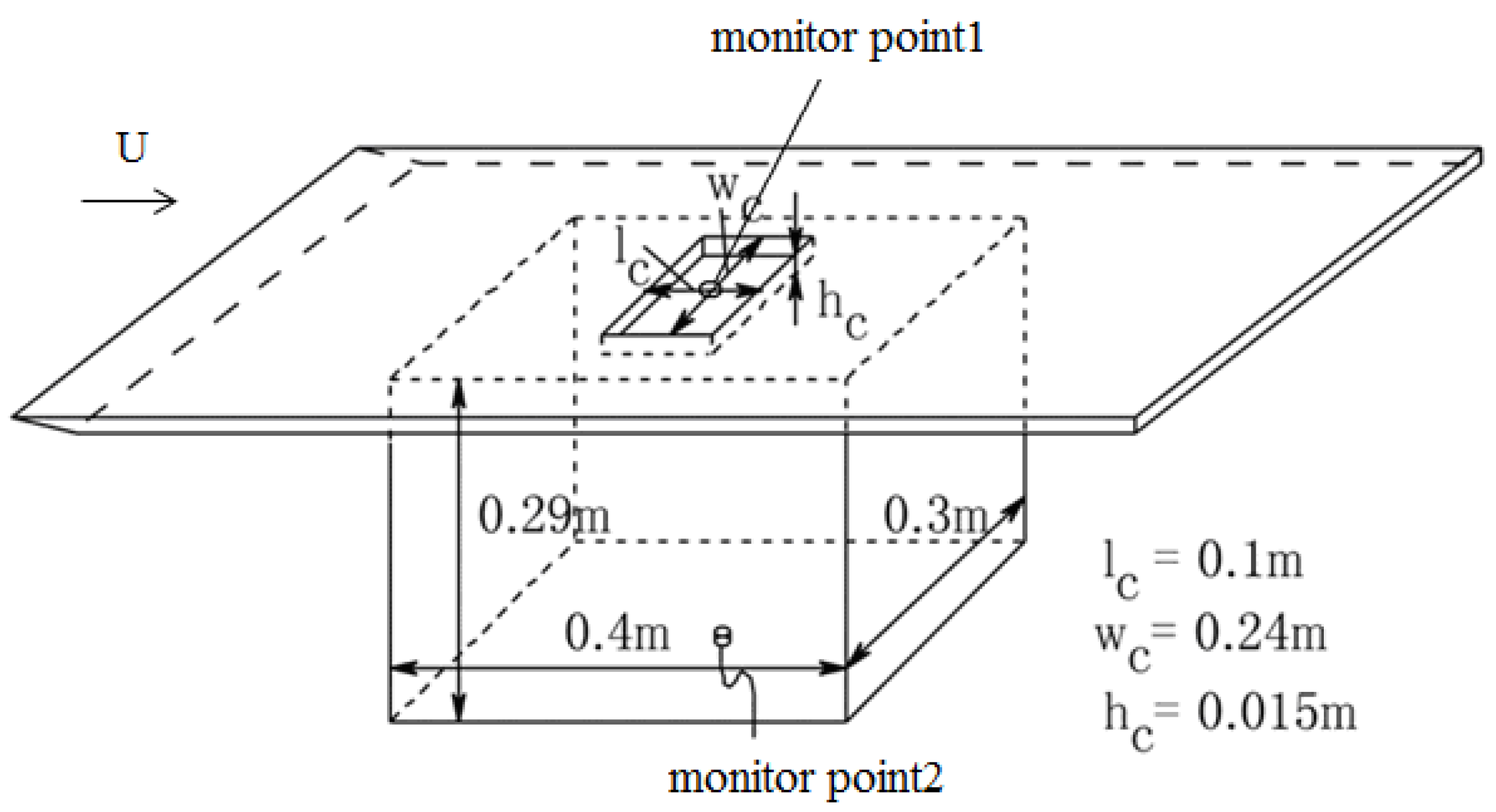
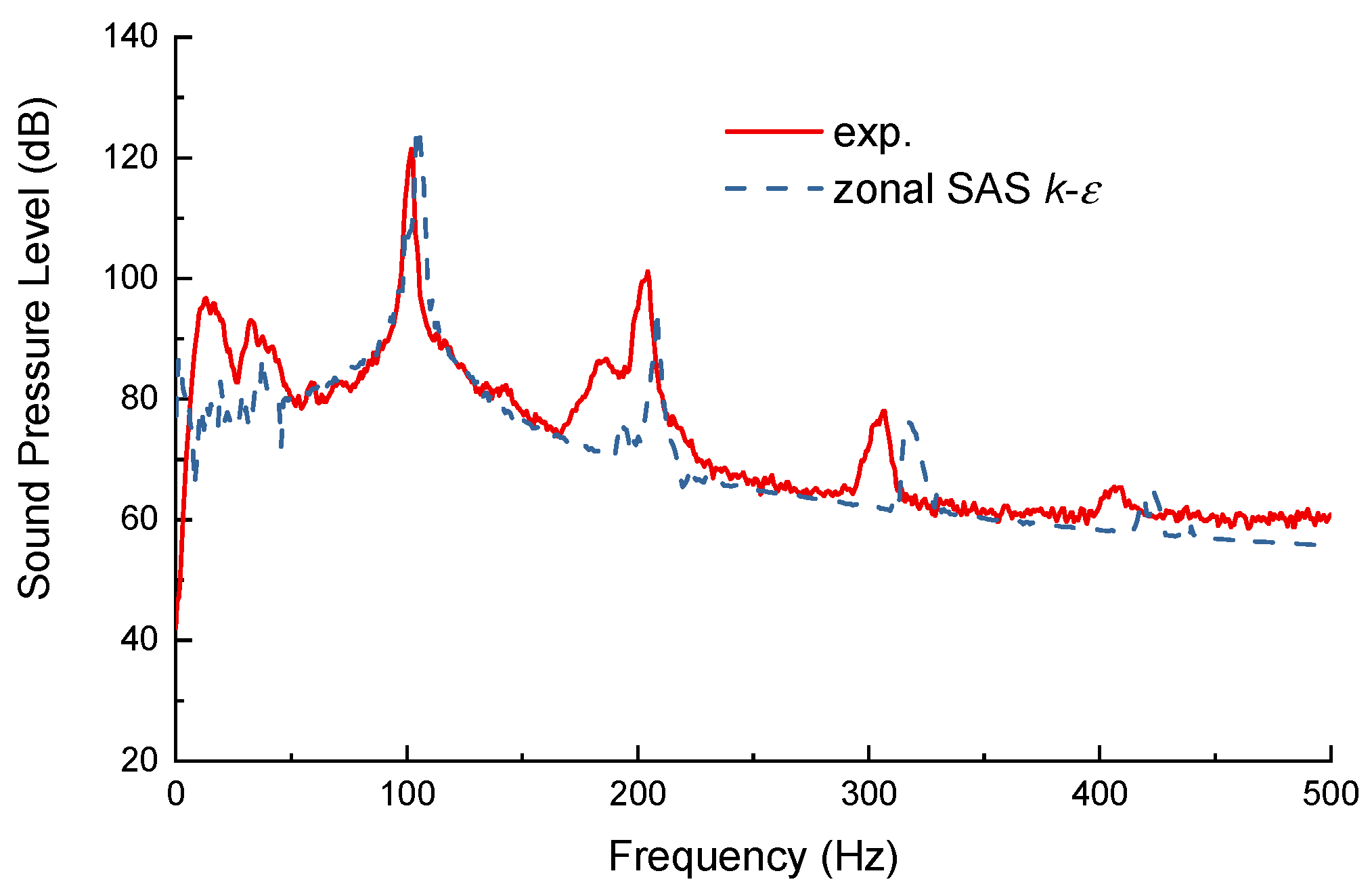
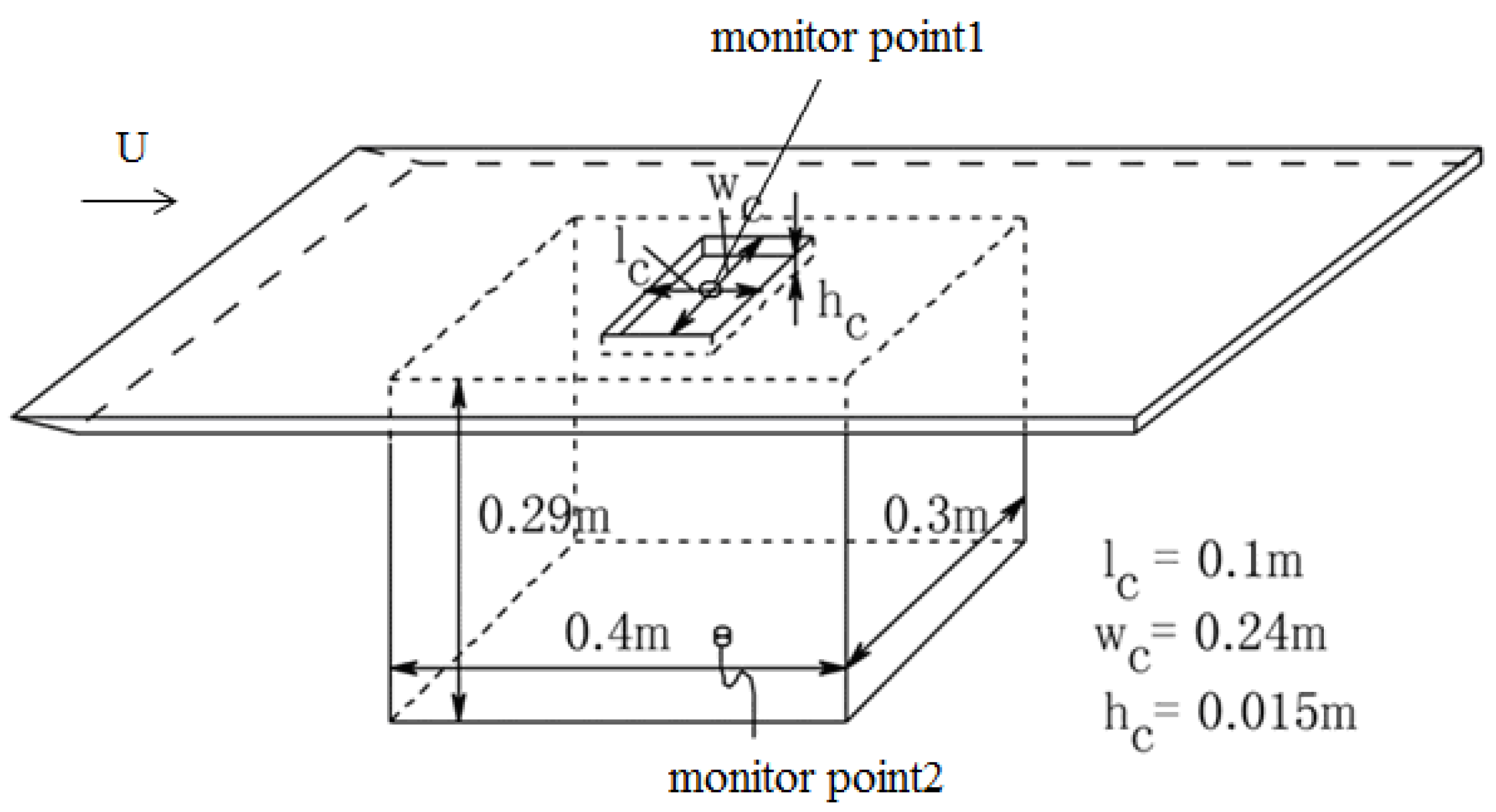
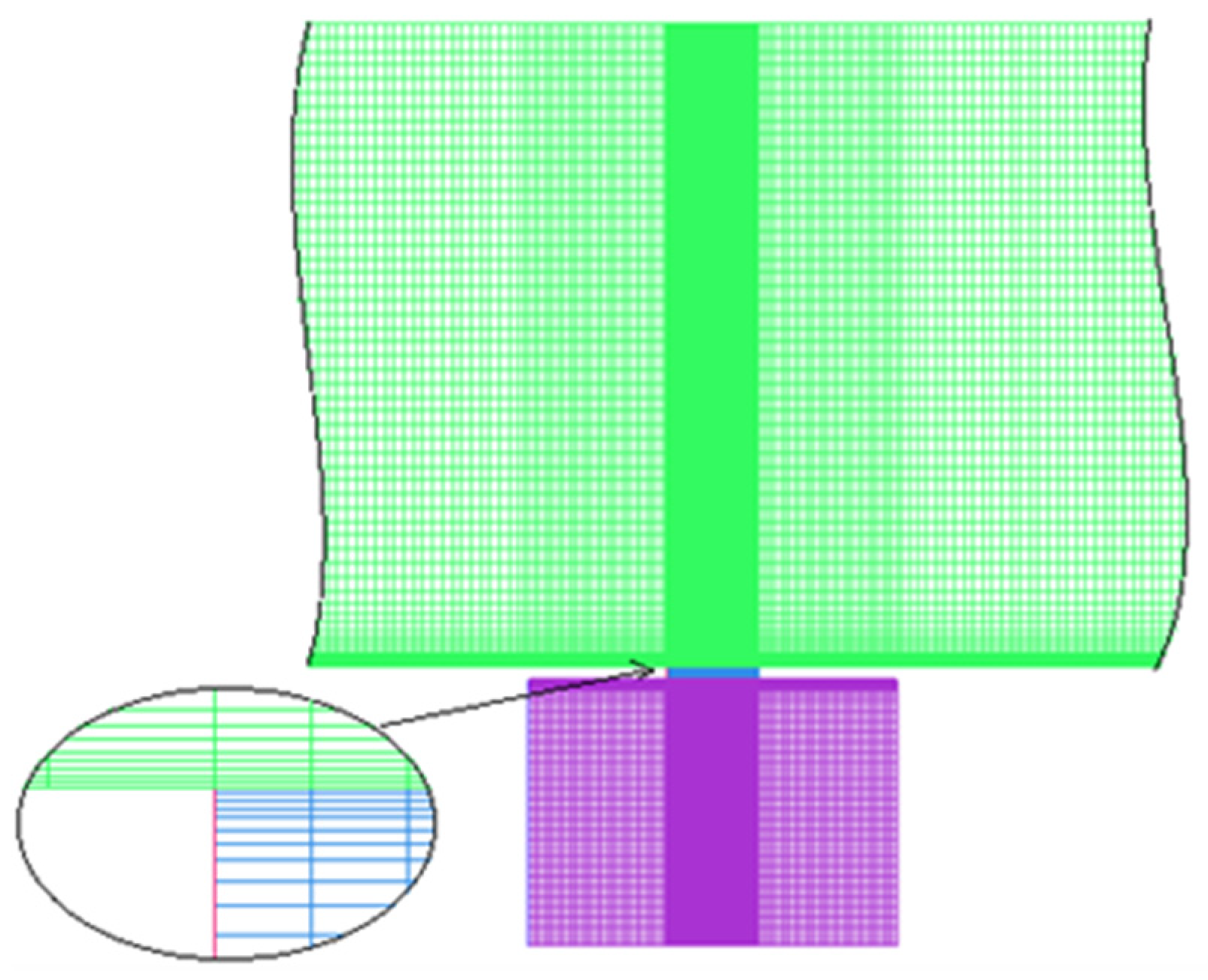
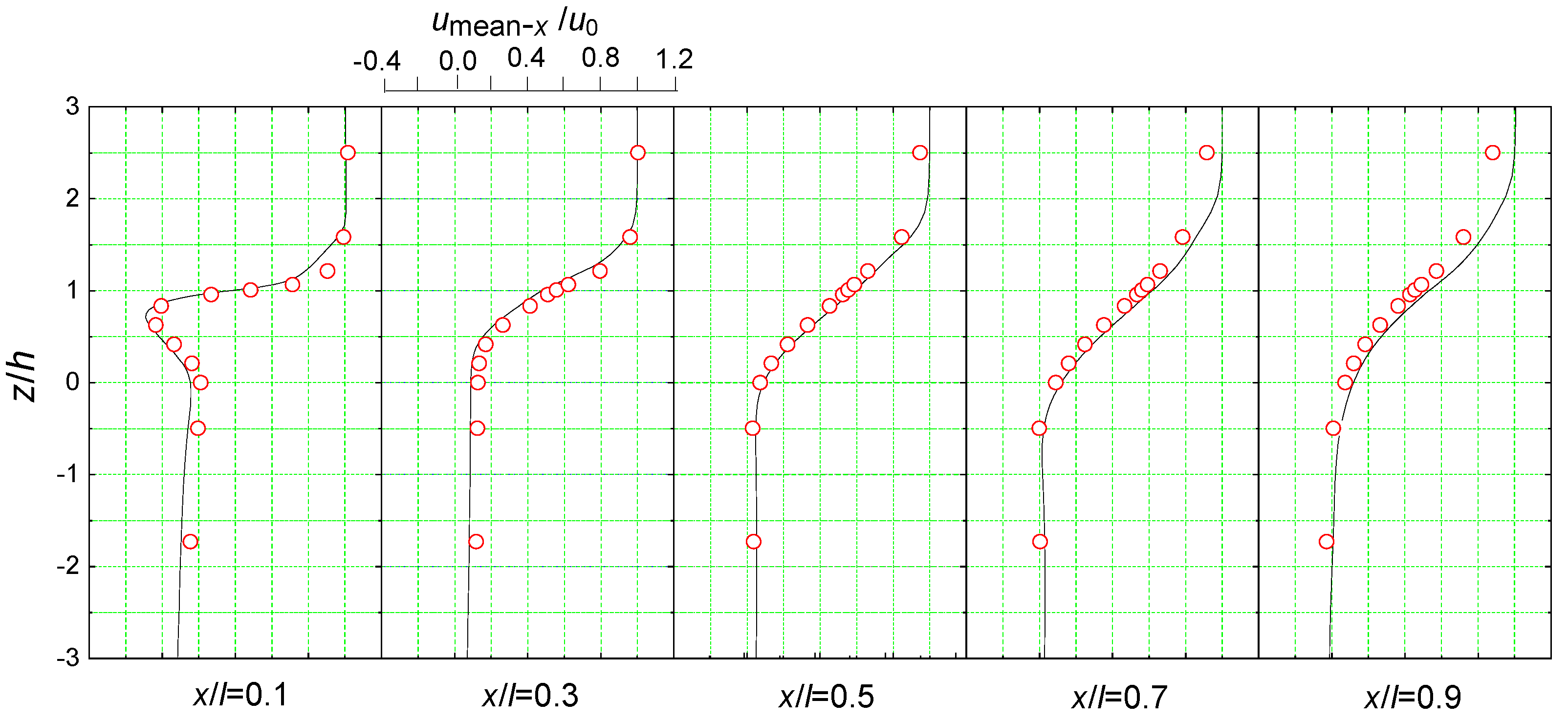
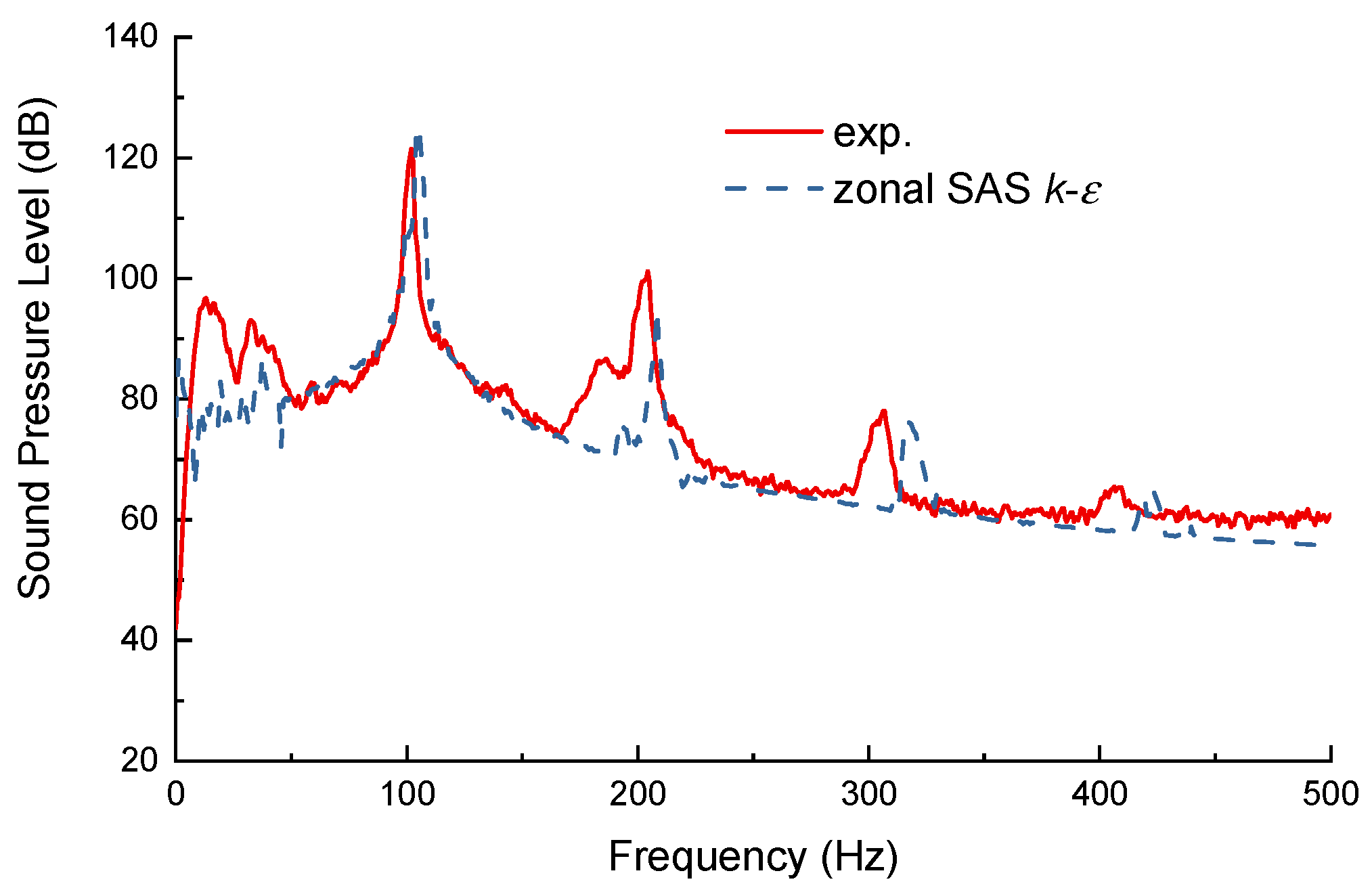
- A zonal formulation of the SAS approach was employed in this study. A deep cavity as a benchmark problem was used to validate the approach. The results show that the CFD method can be used for side window buffeting noise predictions at earlier stages of the program.
- (2)
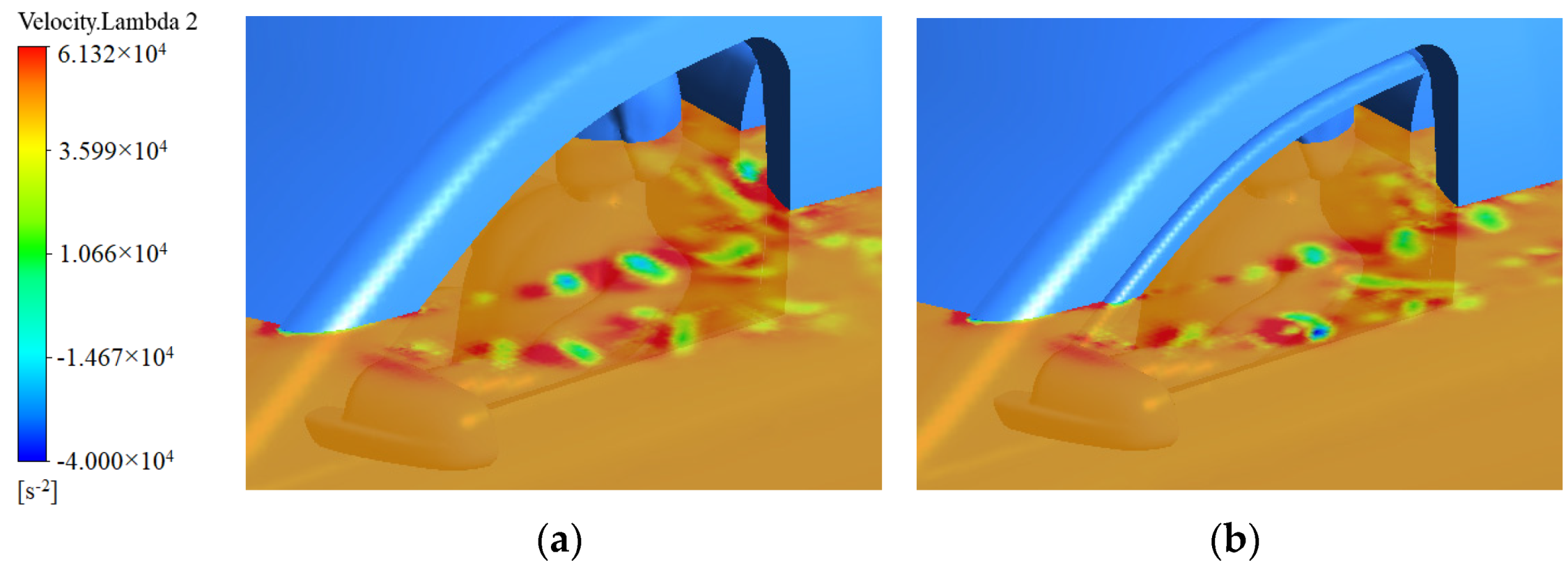
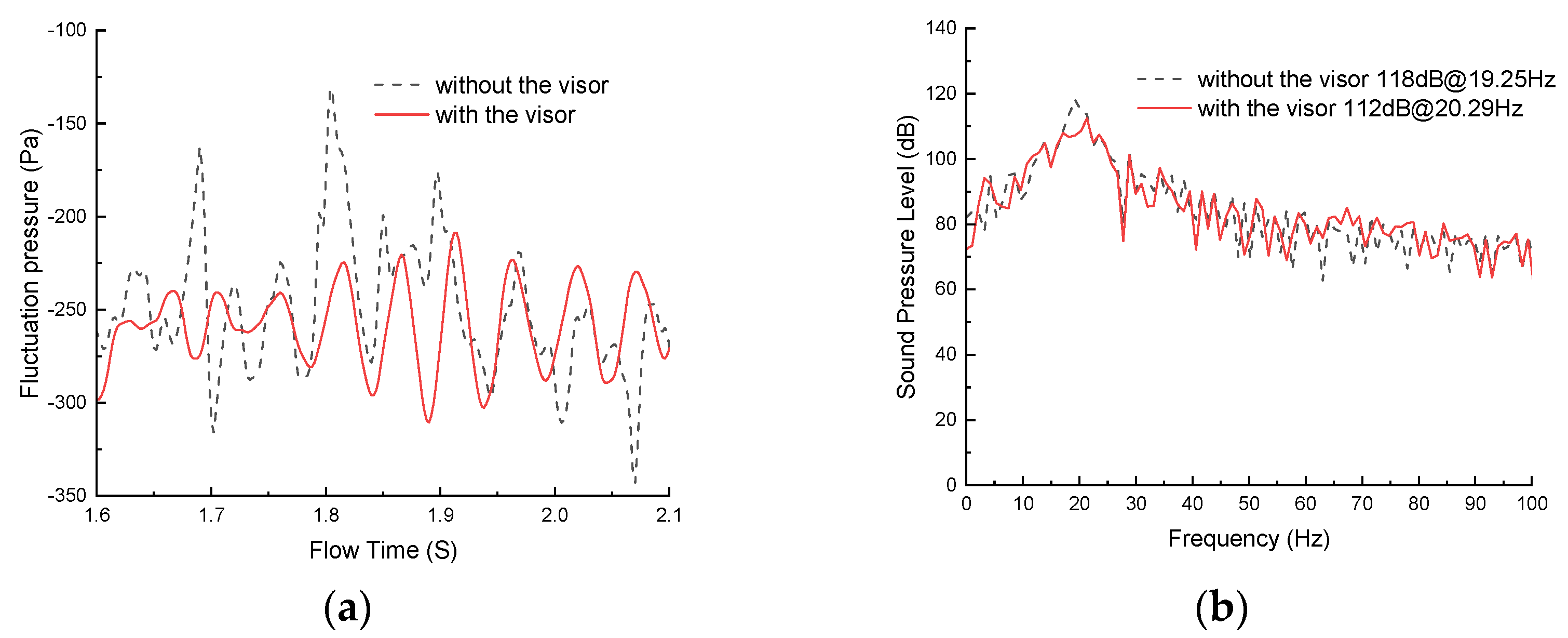
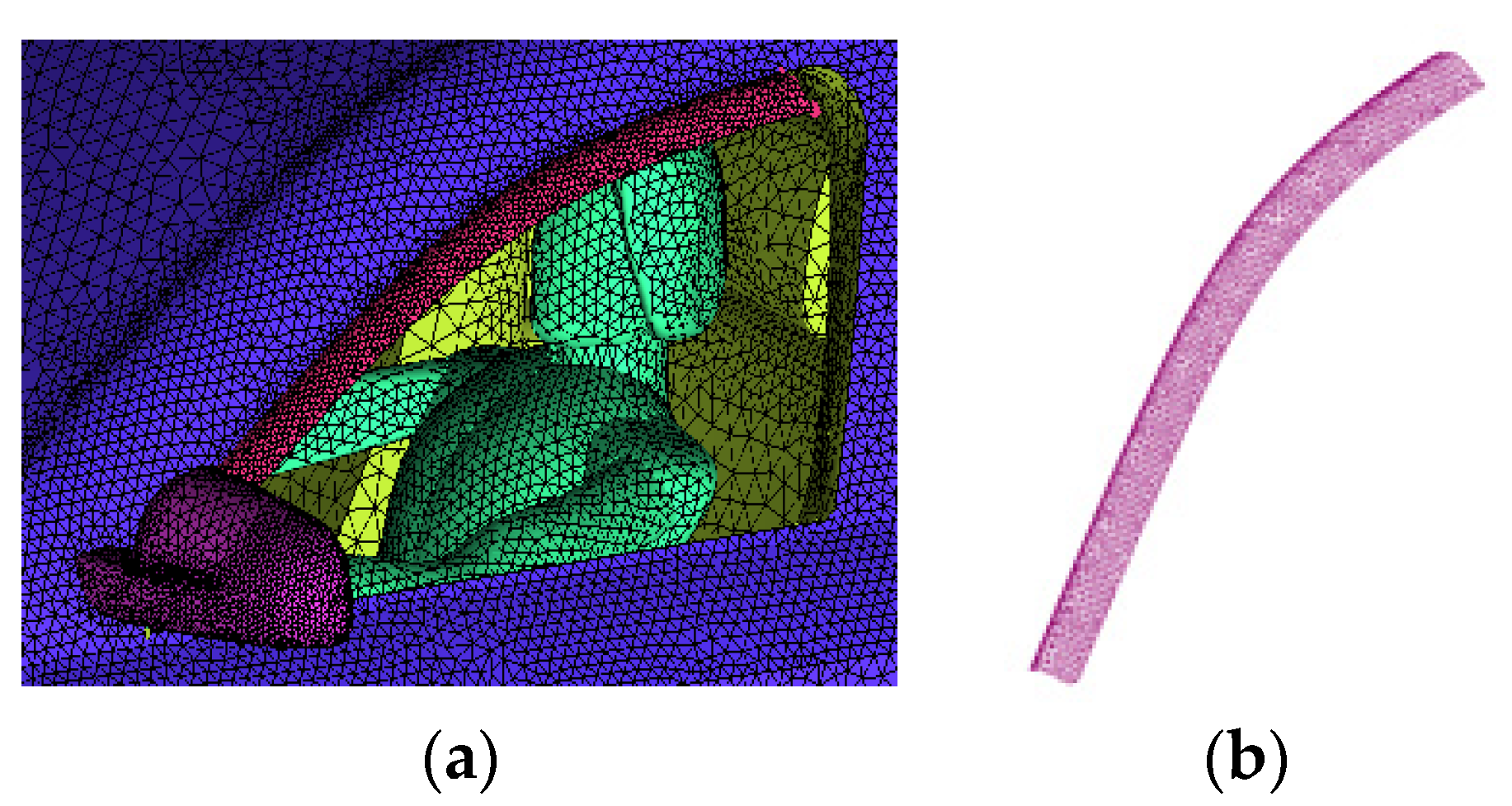
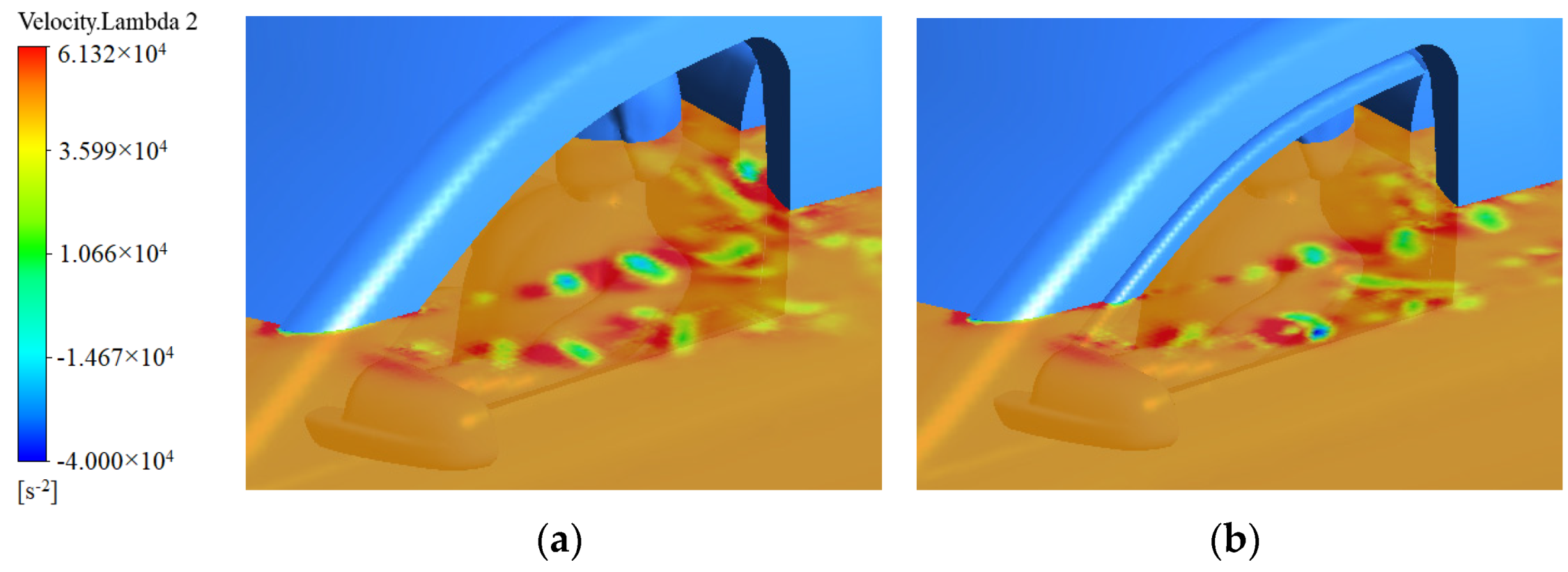
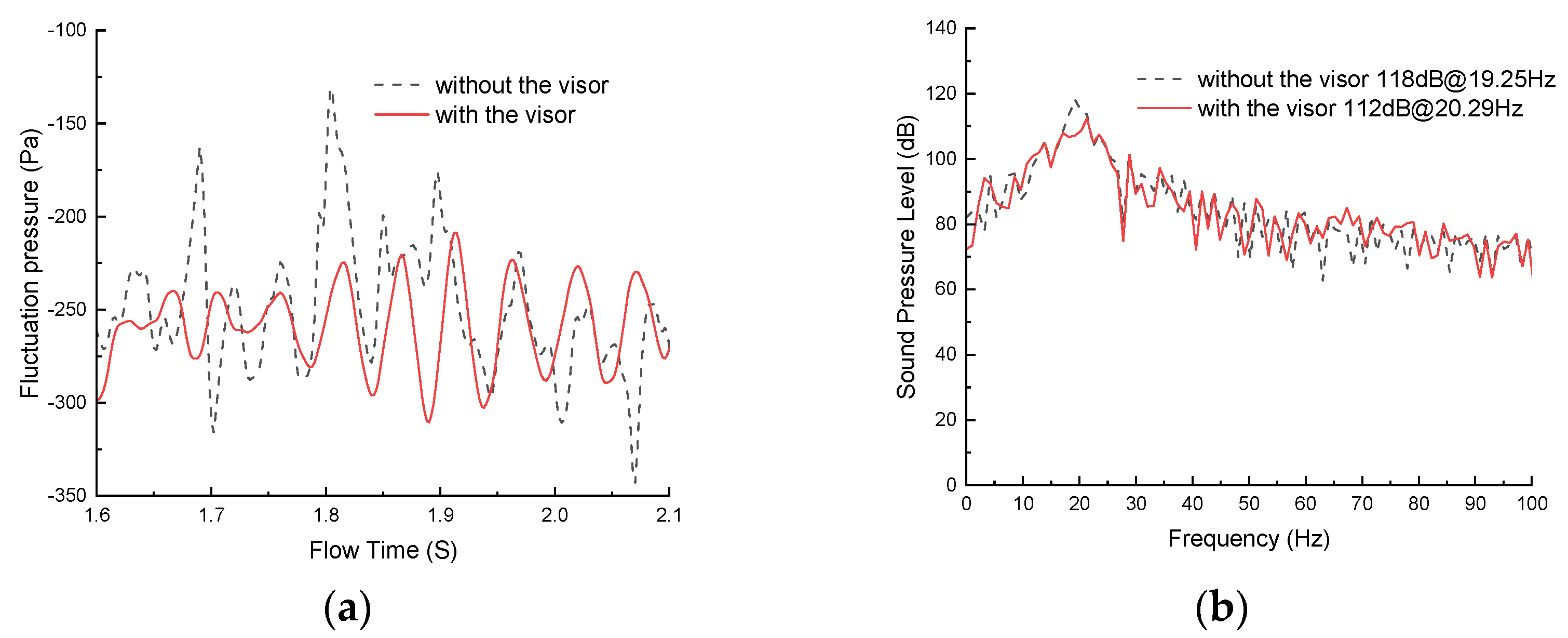
- Aiming at the problem of the wind buffeting noise of the front side window, the CFD numerical simulation of the front side window fully opened was carried out. The results show that the front window visor changes the path of vortex shedding from the A-pillar, and thus reduces the vortex invading the cabin. The fluctuation pressure at the driver’s ear is reduced, so the wind buffeting noise is better suppressed.
- (3)
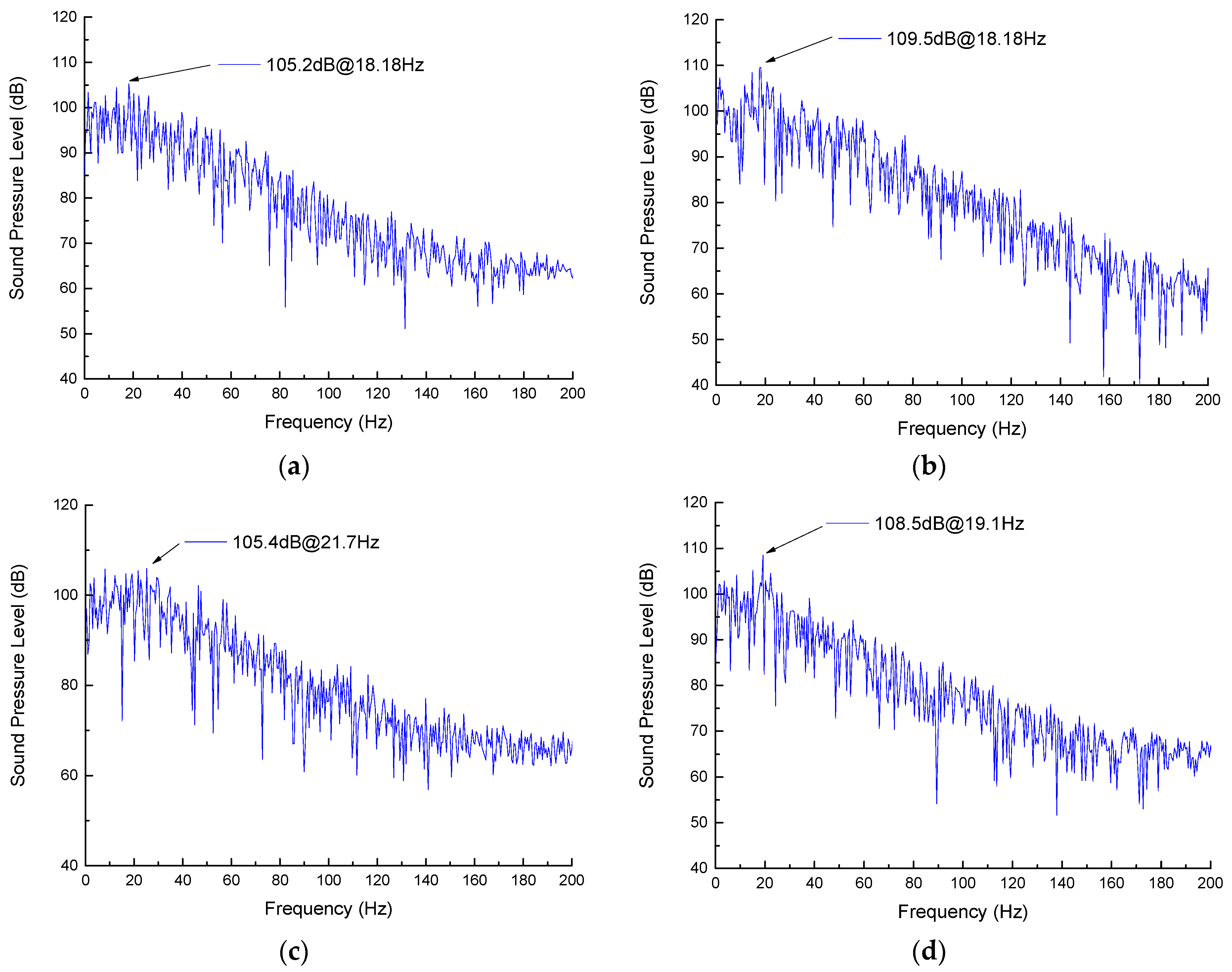
- The optimization algorithm is used to optimize the shape of the front rain visor. Compared with the case without the visor, the CFD results show that the optimized visor reduces the peak sound pressure level of the driver’s left ear by 14.5 dB.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karbon, K.; Singh, R. Simulation and Design of Automobile Sunroof Buffeting Noise Control. In Proceedings of the 8th AIAA/CEAS Aeroacoustics Conference & Exhibit, Breckenridge, CO, USA, 17–19 June 2002; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2002. [Google Scholar]
- An, C.-F.; Singh, K. Sunroof buffeting suppression using a dividing bar. In Proceedings of the 2007 World Congress, Detroit, MI, USA, 16–19 April 2007; SAE International: Detroit, MI, USA, 2007. [Google Scholar]
- Ota, D.K.; Chakravarthy, S.R.; Becker, T.; Sturzenegger, T. Computational Study of Resonance Suppression of Open Sunroofs. J. Fluids Eng. 1994, 116, 877–882. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Y.; Yang, Z.; Jiang, T.; Su, C.; Yang, X. Numerical study of the flow-induced sunroof buffeting noise of a simplified cavity model based on the slightly compressible model. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1187–1199. [Google Scholar] [CrossRef]
- Yang, Z.; Gu, Z. Analysis of car sunroof buffeting noise based on scale-adaptive simulation. Jixie Gongcheng Xuebao/J. Mech. Eng. 2016, 52, 107–117. [Google Scholar] [CrossRef]
- Kook, H.-S.; Shin, S.-R.; Cho, J.; Ih, K.-D. Development of an active deflector system for sunroof buffeting noise control. J. Vib. Control 2013, 20, 2521–2529. [Google Scholar] [CrossRef]
- Yang, Z.; Gu, Z.; Dong, G.; Yang, X.; Shen, H. Analysis and optimal control for car sunroof buffeting noise. Zhendong yu Chongji/J. Vib. Shock 2014, 33, 193–201. [Google Scholar]
- He, Y.; Zhang, Q.; An, C.; Wang, Y.; Xu, Z.; Zhang, Z. Computational investigation and passive control of vehicle sunroof buffeting. J. Vib. Control 2019, 26, 747–756. [Google Scholar] [CrossRef]
- Tang, R.; He, H.; Lu, Z.; Li, S.; Xu, E.; Xiao, F.; Núñez-Delgado, A. Control of Sunroof Buffeting Noise by Optimizing the Flow Field Characteristics of a Commercial Vehicle. Processes 2021, 9, 1052. [Google Scholar] [CrossRef]
- Zhang, Q.; He, Y.; Wang, Y.; Xu, Z.; Zhang, Z. Computational study on the passive control of sunroof buffeting using a sub-cavity. Appl. Acoust. 2020, 159, 107097. [Google Scholar] [CrossRef]
- Yang, Z.; Gu, Z.; Xie, C.; Zhong, Y.; Jiang, C.; Zhang, Q. An Investigation into Characteristics Discrepancy of Vehicle Side-window Buffeting Noise. Qiche Gongcheng/Automot. Eng. 2018, 40, 981–988. [Google Scholar]
- Gu, Z.; Xiao, Z.; Mo, Z. Review of CFD simulation on vehicle wind buffeting. Noise Vib. Control 2007, 27, 65–68. [Google Scholar]
- Gu, Z.-Q.; Wang, N.; Wang, Y.-P.; Zhang, Y.; Liu, L.-G. Control of wind buffeting noise in side-window of automobiles based on cavity flow characteristics. Zhendong Gongcheng Xuebao/J. Vib. Eng. 2014, 27, 408–415. [Google Scholar]
- An, C.-F.; Alaie, S.M.; Sovani, S.D.; Scislowicz, M.S.; Singh, K. Side window buffeting characteristics of an SUV. In Proceedings of the 2004 SAE World Congress, Detroit, MI, USA, 8–11 March 2004; SAE International: Detroit, MI, USA, 2004. [Google Scholar]
- Balasubramanian, G.; Raghu Mutnuri, L.A.; Sugiyama, Z.; Senthooran, S.; Freed, D. A computational process for early stage assessment of automotive buffeting and wind noise. SAE Int. J. Passeng. Cars-Mech. Syst. 2013, 6, 1231–1238. [Google Scholar] [CrossRef]
- Walker, R.; Wei, W. Optimization of mirror angle for front window buffeting and wind noise using experimental methods. In Proceedings of the Noise and Vibration Conference and Exhibition, St. Charles, IL, USA, 15–17 May 2007; SAE International: St. Charles, IL, USA, 2007. [Google Scholar]
- Yang, Z.; Gu, Z.; Tu, J.; Dong, G.; Wang, Y. Numerical analysis and passive control of a car side window buffeting noise based on Scale-Adaptive Simulation. Appl. Acoust. 2014, 79, 23–34. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, X.; Zhang, Y.; Lin, Q.; Zhang, Y.; Zhang, Y. Side Window Buffeting Characteristics of SUV by CFD Simulation. Jixie Gongcheng Xuebao/J. Mech. Eng. 2021, 57, 156–163. [Google Scholar]
- He, Y.; Long, L.; Yang, Z. Reduction and optimization of a vehicle’s rear side window buffeting. Noise Control Eng. J. 2018, 66, 298–307. [Google Scholar] [CrossRef]
- Menter, F.R.; Egorov, Y. The Scale-Adaptive Simulation Method for Unsteady Turbulent Flow Predictions. Part 1: Theory and Model Description. Flow Turbul. Combust. 2010, 85, 113–138. [Google Scholar] [CrossRef]
- Yang, Z. Comprehensive Study of Characteristics and Passive Control Methods of Vehicle Buffeting Noise. Ph.D. Thesis, Hunan University, Changsha, China, 2016. [Google Scholar]
- Mehdizadeh, A.; Foroutan, H.; Vijayakumar, G.; Sadiki, A. A new formulation of scale-adaptive simulation approach to predict complex wall-bounded shear flows. J. Turbul. 2014, 15, 629–649. [Google Scholar] [CrossRef]
- Speziale, C.G.; Bernard, P.S. The energy decay in self-preserving isotropic turbulence revisited. J. Fluid Mech. 1992, 241, 645–667. [Google Scholar] [CrossRef] [Green Version]
- Rowley, C.W.; Colonius, T.I.M.; Basu, A.J. On self-sustained oscillations in two-dimensional compressible flow over rectangular cavities. J. Fluid Mech. 2002, 455, 315–346. [Google Scholar] [CrossRef]
- Menter, F.; Schutze, J.; Kurbatskii, K.; Lechner, R.; Gritskevich, M.; Garbaruk, A. Scale-Resolving Simulation Techniques in Industrial CFD. In Proceedings of the 6th AIAA Theoretical Fluid Mechanics Conference, Honolulu, HI, USA, 27–30 June 2011; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011; pp. 1–12. [Google Scholar]
- Yang, Z.; Jin, Y.; Gu, Z. Aerodynamic Shape Optimization Method of Non-Smooth Surfaces for Aerodynamic Drag Reduction on a Minivan. Fluids 2021, 6, 365. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | Number of Elements | Mesh Size (mm) | Mean Pressure Coefficient | Peak Value of the Pressure Fluctuation | |||||
|---|---|---|---|---|---|---|---|---|---|
| xmin | xman | ymin | yman | zmin | zmax | ||||
| Coarse | 1.844382 × 106 | 2.60 | 19.12 | 4.06 | 10.21 | 1.00 | 20.60 | 0.05159 | 92.75 pa |
| Medium | 2.247365 × 106 | 2.30 | 15.85 | 3.03 | 6.21 | 0.50 | 18.81 | 0.05165 | 87.31 pa |
| Fine | 2.647365 × 106 | 2.00 | 10.21 | 2.42 | 4.82 | 0.10 | 15.27 | 0.05171 | 86.56 pa |
| R (mm) | W (mm) | L1 (mm) | L2 (mm) | |
|---|---|---|---|---|
| YU1 | 11.6 | 16.88 | 36.95 | 63.29 |
| YU2 | 5.00 | 30.67 | 16.42 | 53.95 |
| YU3 | 0 | 24.7 | 34.89 | 63.42 |
| YU4 | 9.83 | 22.66 | 2.05 | 58.68 |
| YU5 | 12.63 | 16.88 | 24.63 | 52.37 |
| YU6 | 12.42 | 26.69 | 32.84 | 50.79 |
| YU7 | 15 | 28.66 | 10.26 | 60.26 |
| YU8 | 9.97 | 14.66 | 12.64 | 57.14 |
| YU9 | 3.32 | 14.67 | 4.11 | 61.25 |
| YU10 | 1.58 | 20.66 | 6.16 | 53.16 |
| Number | Design Variable (mm) | Peak Value SPL (dB) | |||||
|---|---|---|---|---|---|---|---|
| R | W | L1 | L2 | Approximation Model | CFD Simulation | Relative Error | |
| 1 | 8 | 15 | 22 | 60 | 109.24 | 110.53 | 1.17% |
| 2 | 9 | 16 | 10 | 55 | 113.45 | 115.21 | 1.53% |
| Without the Visor | Optimized Visor | Improvement Effect | ||
|---|---|---|---|---|
| Approximation Model | CFD Simulation | Error | ||
| 116.5 dB | 98.2 dB | 102 dB | 3.87% | −12.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Liu, L.; Gu, Z. Numerical Analysis and Optimization of the Front Window Visor for Vehicle Wind Buffeting Noise Reduction Based on Zonal SAS k-ε Method. Appl. Sci. 2022, 12, 6906. https://doi.org/10.3390/app12146906
Yang Z, Liu L, Gu Z. Numerical Analysis and Optimization of the Front Window Visor for Vehicle Wind Buffeting Noise Reduction Based on Zonal SAS k-ε Method. Applied Sciences. 2022; 12(14):6906. https://doi.org/10.3390/app12146906
Chicago/Turabian StyleYang, Zhendong, Longgui Liu, and Zhengqi Gu. 2022. "Numerical Analysis and Optimization of the Front Window Visor for Vehicle Wind Buffeting Noise Reduction Based on Zonal SAS k-ε Method" Applied Sciences 12, no. 14: 6906. https://doi.org/10.3390/app12146906
APA StyleYang, Z., Liu, L., & Gu, Z. (2022). Numerical Analysis and Optimization of the Front Window Visor for Vehicle Wind Buffeting Noise Reduction Based on Zonal SAS k-ε Method. Applied Sciences, 12(14), 6906. https://doi.org/10.3390/app12146906