
Construction and Evaluation of a Control Mechanism for Fuzzy Fractional-Order PID


Abstract
1. Introduction
2. Materials and Methods
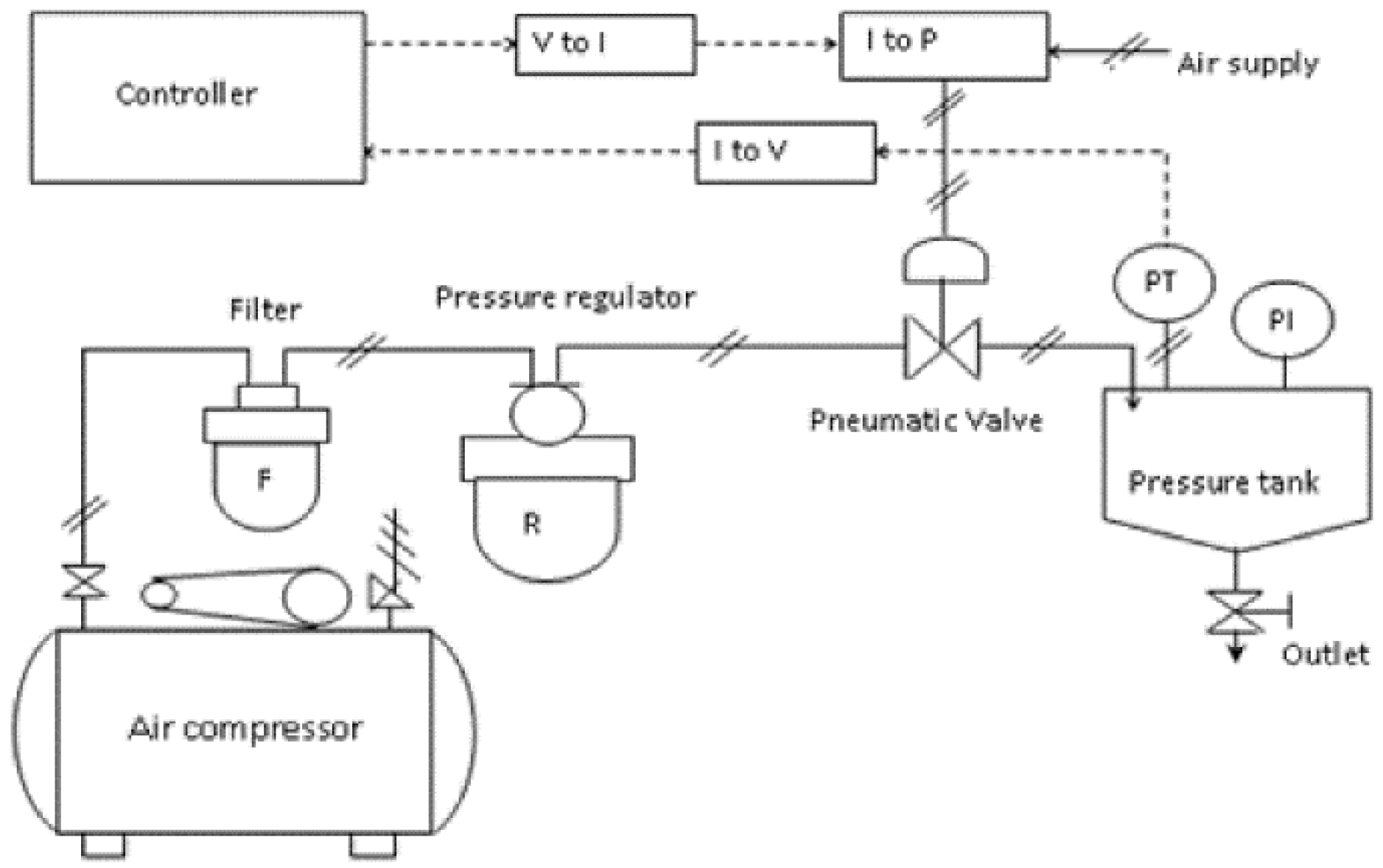
Pneumatic System
3. Overview of System
4. Pneumatic Pressure Control System Modelling
4.1. Model for Integer Order
4.2. Fractional Order Model
5. Controller Design
5.1. Integer Order PID Controller
5.2. Fractional-Order PID Controller
5.3. Fuzzy Fractional-Order PID (FFOPID) Controller
6. Simulation
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Astrom, K.J.; Hagglund, T. Pid Controllers: Theory, Design, and Tuning, 2nd ed.; Instrument Society of America: Pittsburgh, PA, USA, 1995; p. 343. [Google Scholar]
- Das, S.; Pan, I.; Das, S.; Gupta, A. Improved Model Reduction and Tuning of Fractional Order PIλDμ Controllers for Analytical Rule Extraction with Genetic Programming. ISA Trans. 2012, 51, 237–261. [Google Scholar] [CrossRef] [PubMed]
- Águila-León, J.; Chiñas-Palacios, C.D.; Vargas-Salgado, C.; Hurtado-Perez, E.; García, E.X.M. Optimal PID Parameters Tunning for a DC-DC Boost Converter: A Performance Comparative Using Grey Wolf Optimizer, Particle Swarm Optimization and Genetic Algorithms. In Proceedings of the 2020 IEEE Conference on Technologies for Sustainability (SusTech), Santa Ana, CA, USA, 23–25 April 2020; pp. 1–6. [Google Scholar]
- Ramasamy, S.; Senthilkumar, N.; Karpagam, S.; Ramani, U.; Swetha, B. Embedded PID Controller Design Based Self Adjusting Robot. In Proceedings of the 2022 Second International Conference on Artificial Intelligence and Smart Energy (ICAIS), Coimbatore, India, 23–25 February 2022; pp. 1531–1535. [Google Scholar]
- Guo, J.; Lu, Y.; Li, Z. PID parameter tuning algorithm of rotor UAV Based on Improved Particle Swarm Optimization. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 1251–1255. [Google Scholar]
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin, Germany, 2008. [Google Scholar]
- Podlubny, I.; Petras, I.; Vinagre, B.M.; O’Leary, P.; Dorcak, L. Analogue realizations of fractional-order controllers. Nonlinear Dyn. 2002, 29, 281–296. [Google Scholar] [CrossRef]
- Charef, A. Analogue realization of fractional-order integrator, differentiator and fractional PI Dλμ controller. IET Control Theory Appl. 2006, 153, 714–720. [Google Scholar] [CrossRef]
- Ajmera, Y.A.; Sankeshwari, S.S. Fuzzy fractional order sliding mode controller for dc motor. Int. J. Adv. Eng. Technol. 2013, 6, 1876–1885. [Google Scholar]
- Zhang, L.; Shao, X.; Chen, Z. The application of internal model fractional order control in induction motor speed control system. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 4640–4645. [Google Scholar]
- Asadollahi, M.; Ghiasi, A.R.; Dehghani, H. Excitation control of a synchronous generator using a novel fractional-order controller. IET Gener. Transm. Distrib. 2015, 9, 2255–2260. [Google Scholar] [CrossRef]
- Baleanu, D.; Güvenç, Z.B.; Machado, J.T. New Trends in Nanotechnology and Fractional Calculus Applications; Springer: Cham, Switzerland, 2010. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, J.T. Advances in Fractional Calculus; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- Boulkroune, A.; Bouzeriba, A.; Bouden, T. Fuzzy Generalized Projective Synchronization of Incommensurate Fractional-Order Chaotic Systems. Neurocomputing 2016, 173, 606–614. [Google Scholar] [CrossRef]
- Bouzeriba, A.; Boulkroune, A.; Bouden, T.; Vaidyanathan, S. Fuzzy Adaptive Synchronization of Incommensurate Fractional-Order Chaotic Systems. In Advances and Applications in Chaotic Systems; Springer: Cham, Switzerland, 2016; pp. 363–378. [Google Scholar]
- Podlubny, I. Fractional-order system and PIλDμ-controllers. IEEE Trans. Automat. Contr. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Oustaloup, A. La Commande CORNE: Command Robust D’ordre Non Entire; Hermes: Paris, France, 1991. [Google Scholar]
- Heidari, Y.; Noee, A.R.; Ali Shayanfar, H.; Saheli, S. Robust control of dc motor using fuzzy sliding mode control with fractional PID compensator. Int. J. Math. Comput. Sci. 2010, 1, 238–246. [Google Scholar] [CrossRef][Green Version]
- Monje, C.A.M.; Vinagre, B.; Feliu, V.; YangQuan, C. Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef]
- Roy, P.; Roy, B.K. Fractional order PI control applied to level control in coupled two tank MIMO system with experimental validation. Control Eng. Pract. 2016, 48, 119–135. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.; Ahn, H.S.; Pi, Y. Fractional order robust control for cogging effect compensation in PMSM position servo systems: Stability analysis and experiments. Control Eng. Pract. 2010, 18, 1022–1036. [Google Scholar] [CrossRef]
- Rajasekhar, A.; Das, S.; Abraham, A. Fractional Order PID controller design for speed control of chopper fed DC motor drive using artificial Bee Colony algorithm. In Proceedings of the World Congress on Nature and Biologically Inspired Computing (NaBIC), Fargo, ND, USA, 12–14 August 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Liu, L.; Xue, D.; Zhang, S. General type industrial temperature system control based on fuzzy fractional-order PID controller. Complex Intell. Syst. 2021. [Google Scholar] [CrossRef]
- Passino, K.M.; Yurkovich, S. Fuzzy-Control; Addision Wesley Longman: Boston, MA, USA, 1998. [Google Scholar]
- Vahedpour, M.; Noei, A.R.; Kholerdi, H.A. Comparison between performance of conventional, fuzzy and fractional-order PID controllers in practical speed control of induction motor. In Proceedings of the 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 912–916. [Google Scholar]
- Noureddine, B.; Djamel, B.; Boudjema, F. Tuning fuzzy fractional order PID sliding-mode controller using PSO algorithm for nonlinear systems. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; IEEE: New York, NY, USA, 2013; pp. 797–803. [Google Scholar]
- Jegatheesh, A.; Kumar, C.A. Novel fuzzy fractional order PID controller for nonlinear interacting coupled spherical tank system for level process. Microprocess. Microsyst. 2020, 72, 102948. [Google Scholar] [CrossRef]
- Ardjal, A.; Bettayeb, M.; Mansouri, R.; Zouak, B. Design and implementation of a Model-Free Fractional Order Intelligent PI Fractional Order Sliding Mode Controller for water level tank system. ISA Trans. 2021. [Google Scholar] [CrossRef] [PubMed]
- Er, M.J.; Zhou, Y.; Sun, L. Hybrid fuzzy proportional-integral plus conventional derivative control of linear and nonlinear systems. IEEE Trans. Ind. Electron. 2001, 48, 1109–1117. [Google Scholar]
- Zumberge, J.; Passino, K.M. A case study in intelligent vs. conventional control for a process experiment. Control Eng. Pract. 1998, 6, 1055–1075. [Google Scholar] [CrossRef]
- Li, H.X.; Zhang, L.; Cai, K.Y.; Chen, G. An improved robust fuzzy-PID controller with optimal fuzzy reasoning. IEEE Trans. Syst. Man. Cybern. B Cybern. 2005, 35, 1283–1294. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Dingyu, X.; Chen, Y. General Robustness Analysis and Robust Fractional-Order PD Controller Design for Fractional-Order Plants. IET Control Theory Appl. 2018, 12, 1730–1736. [Google Scholar] [CrossRef]
- Vinu, R.; Varghese, P.; Kishore, R. Harmony Search-Fractional Order Based Controller for Proton Exchange Membrane Fuel Cell powered Vehicles. Stud. Inform. Control 2018, 27, 469–480. [Google Scholar]
- Al-Dhaifallah, M. Heat Exchanger Control Using Fuzzy Fractional-Order PID. In Proceedings of the 2019 16th International Multi-Conference on Systems, Signals & Devices (SSD), Istanbul, Turkey, 21–24 March 2019; IEEE: New York, NY, USA, 2019; pp. 73–77. [Google Scholar]
- Oldham, K.B.; Spanier, J. Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with non-local and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Coughanowr, D.R. Process Systems Analysis and Control; McGraw-Hill International: Singapore, 1991. [Google Scholar]
- Chakraborty, M.; Maiti, D.; Konar, A.; Janarthanan, R. A study of the grunwald-letnikov definition for minimizing the effects of random noise on fractional order differential equations. In Proceedings of the International Conference on Information and Automation for Sustainability, Colombo, Sri Lanka, 12–14 December 2008; IEEE: New York, NY, USA, 2008; pp. 449–456. [Google Scholar]
- Cech, M.; Schlegel, M. Generalized robust stability regions for fractional PID controllers. In Proceedings of the IEEE International Conference on Industrial Technology, Cape Town, South Africa, 25–28 February 2013; pp. 76–81. [Google Scholar]
- Xue, D.; Zhao, C.; Chen, Y. Fractional order PID control of a DCmotor with elastic shaft: A case study. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; p. 6. [Google Scholar]
- Čech, M.; Schlegel, M. The fractional-order PID controller outperforms the classical one. In Proceedings of the Process Control, Kouty nad Desnou, Czech Republic, 13–16 June 2006; pp. 1–6. [Google Scholar]
- Luersen, M.A.; Le Riche, R. Nelder–Mead method for engineering optimization. Comput. Struct. 2004, 82, 2251–2260. [Google Scholar] [CrossRef]
- Mudi, R.K.; Pal, N.R. A robust self-tuning scheme for PI-and PD-type fuzzy controllers. IEEE Trans. Fuzzy Syst. 1999, 7, 2–16. [Google Scholar] [CrossRef]
- Moafi, M.; Marzband, M.; Savaghebi, M.; Guerrero, J.M. Energy management system based on fuzzy fractional order PID controller for transient stability improvement in microgrids with energy storage. Int. Trans. Electr. Energy Syst. 2016, 26, 2087–2106. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KP | KI | λ | KD | μ |
|---|---|---|---|---|
| 0.34 | 0.19 | 0.91 | 0.28 | 0.87 |
| ΔKP | Δe | |||
|---|---|---|---|---|
| NE | ZE | P | ||
| e | NE | NB | NS | ZE |
| ZE | NB | NB | NS | |
| P | NS | ZE | PS | |
| ΔKD | NE | ZE | P | |
| e | NE | NB | NB | NS |
| ZE | ZE | ZE | PS | |
| P | ZE | PS | PS | |
| ΔKI | NE | ZE | P | |
| e | NE | NB | NS | NS |
| ZE | NS | ZE | PS | |
| P | ZE | PS | PB | |
| Controller | Settling Time | Overshoot | ISE (Integral Square Error) | IAE (Integral Absolute Error) |
|---|---|---|---|---|
| FFOPID | 3.5 | 0% | 1.64 | 1.96 |
| FOPID | 5 | 0% | 1.74 | 2.16 |
| PID | 7 | 8% | 2.0 | 2.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Dhaifallah, M. Construction and Evaluation of a Control Mechanism for Fuzzy Fractional-Order PID. Appl. Sci. 2022, 12, 6832. https://doi.org/10.3390/app12146832
Al-Dhaifallah M. Construction and Evaluation of a Control Mechanism for Fuzzy Fractional-Order PID. Applied Sciences. 2022; 12(14):6832. https://doi.org/10.3390/app12146832
Chicago/Turabian StyleAl-Dhaifallah, Mujahed. 2022. "Construction and Evaluation of a Control Mechanism for Fuzzy Fractional-Order PID" Applied Sciences 12, no. 14: 6832. https://doi.org/10.3390/app12146832
APA StyleAl-Dhaifallah, M. (2022). Construction and Evaluation of a Control Mechanism for Fuzzy Fractional-Order PID. Applied Sciences, 12(14), 6832. https://doi.org/10.3390/app12146832