
Design and Manufacture of a Flexible Pneumatic Soft Gripper

Abstract
:1. Introduction
2. Design of Soft Gripper
2.1. Design of Fixture for Soft Gripper
2.2. The Design of the Soft Actuator
- (1)
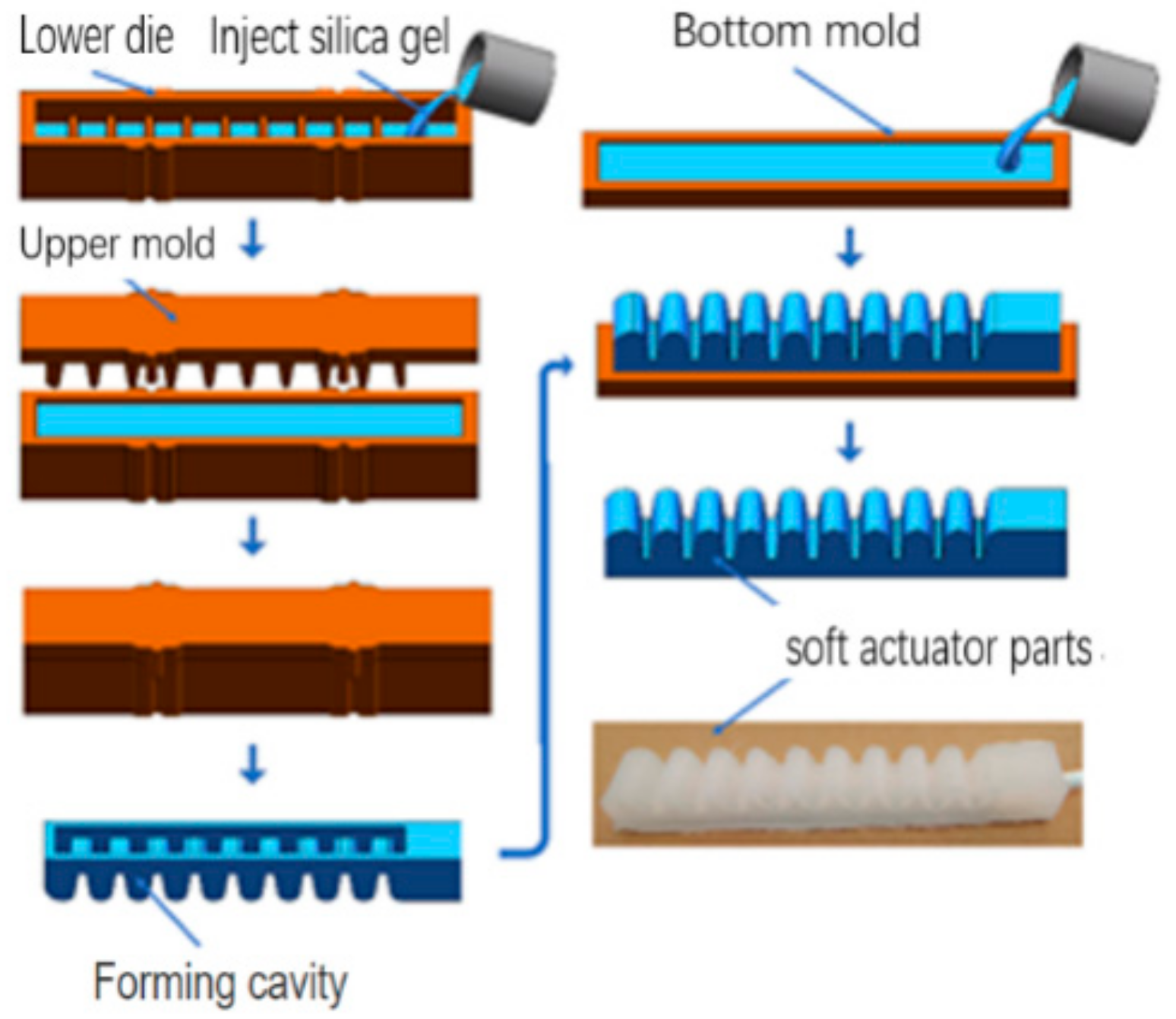
- Actuator molding process: The mold of the soft actuator consists of the upper mold, the lower mold, the plug, and the bottom mold. The molds are designed by 3D software UG and 3D printing. The type of 3D printing equipment is model SP600 with a wavelength of 355 nm and accuracy of 0.1 mm. The printing material was 9400 resin, milky white, 320 cps (30°), density 1.14 g/cm, curing depth 0.12 mm (Dp). Since the upper and lower mold surfaces of the soft gripper are closely bonded during the assembly of the mold, the upper and lower mold surfaces are equipped with an exhaust groove to avoid bubbles affecting the quality of the molded products. For the sake of facilitating the connection with the air source, a 3 mm round hole is arranged at the end of the mold, and the inlet pipe connects the actuator and fixture through the round hole. The whole soft actuator is cast by the casting molding method with the main process flow shown in the diagram.
- (2)
- Preparation of silica gel: Firstly, the silica gel Ecoflex-30 A and B were weighed by electronic weighing and then poured into a small beaker at a mass ratio of 1:1. The bubbles were removed by the vacuum pump for further use.
- (3)
- Molding of actuator cavity part: Vaseline was smeared on the upper and lower molding surfaces with a small brush to rapidly separate the actuator body from the mold after molding. The deformed silica gel was injected into the lower mold, and the mold should be slightly vibrated during the injection process to ensure the uniformity of the colloid in the cavity. Then, a 3 mm plug was inserted into the fixed position to make the upper and lower mold fully closed. After that, these molds were kept at room temperature for more than 4 h until they were fully cured. Finally, the molds were opened to take out the soft actuator cavity.
- (4)
- Preparation of the sealing layer: The prepared mixed colloid was injected into the bottom mold to make it evenly spread. On top of it, the nylon cloth limiting layer with a certain size was placed horizontally and smoothly. Besides, a layer of colloid was evenly coated on the nylon cloth. Finally, the actuator cavity was buckled on it. After being kept at room temperature for 4 h, the molds were removed after complete curing. The soft gripper actuator part was thus finished. Pruning molding actuators are mostly silicone rubber, and the actuators that are damaged or bubbled as unqualified parts were discarded.
- (5)
- Connecting the trachea: A 3 mm diameter trachea was matched with the actuator stomatal channel, and the trachea was inserted into the reserved channel by tweezers. Then, the adhesive at the connection between the trachea and the actuator cavity was evenly smeared. They were kept until firmly sealed. Finally, the air tightness of the actuator was tested by pressurizing air in the actuator.
- (1)
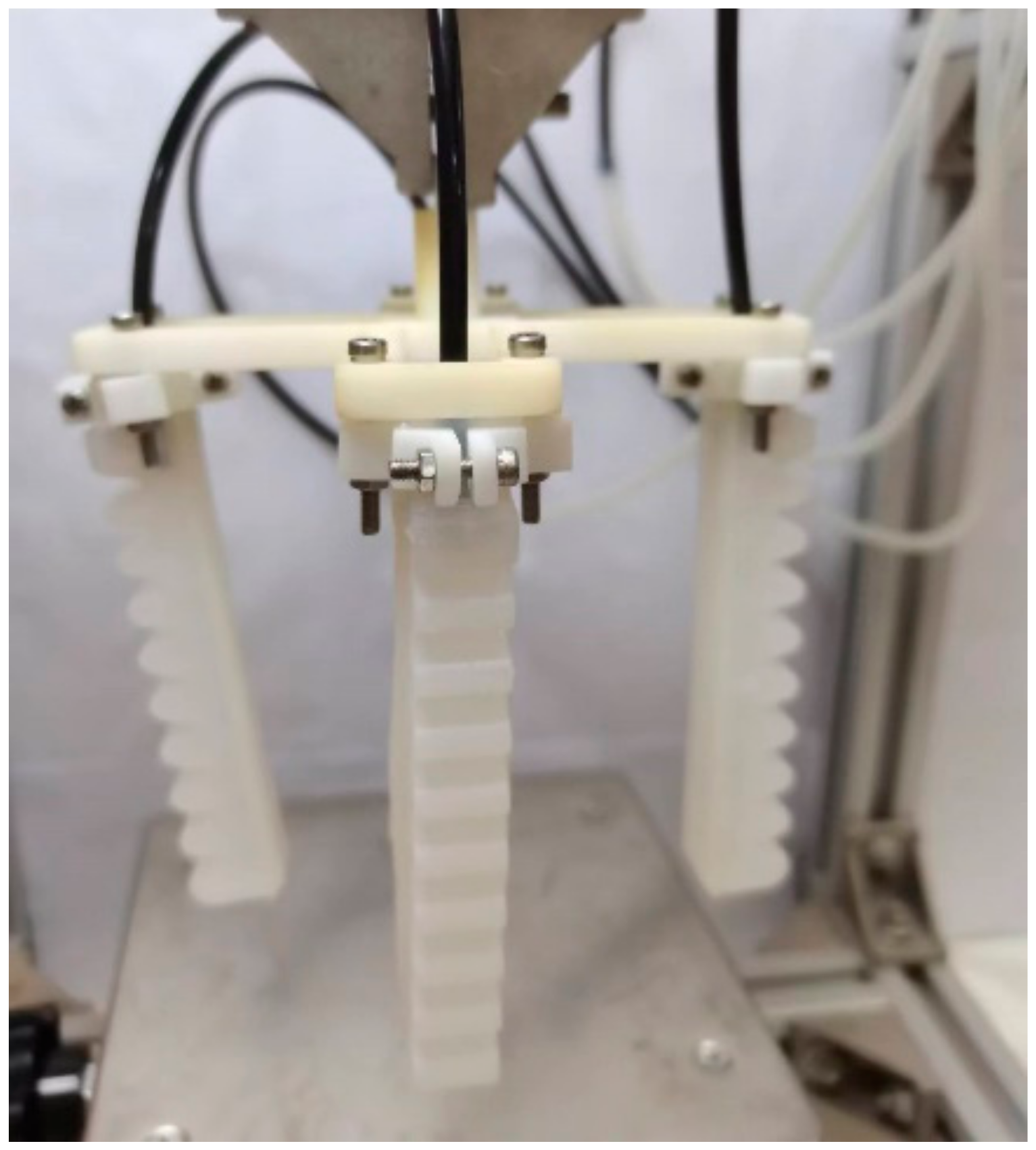
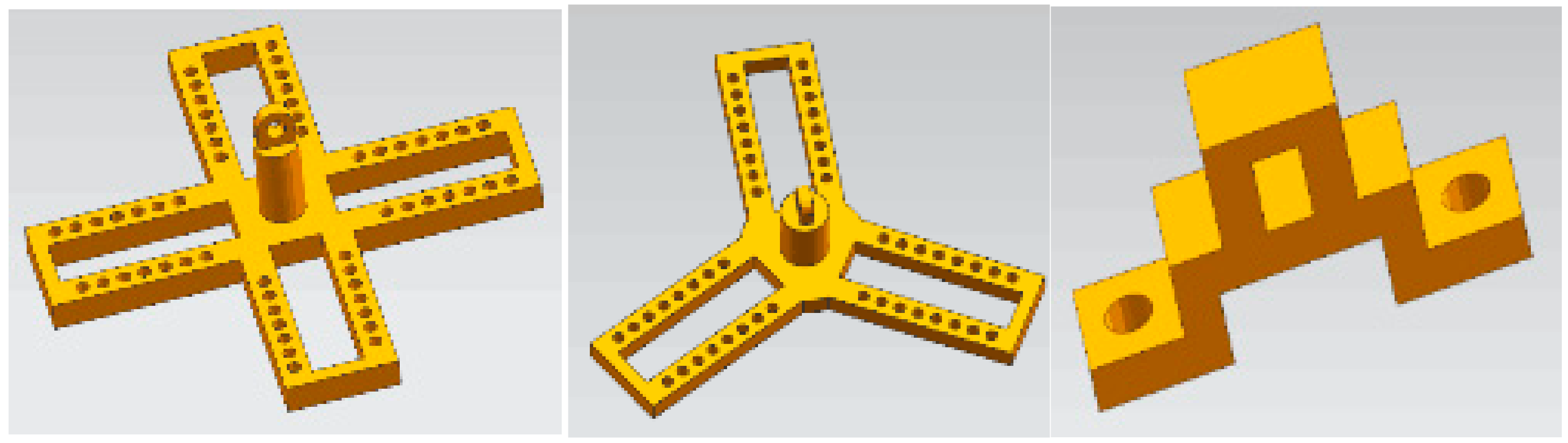
- The structure is stable, which enables the three-actuator or four-actuator grippers to grasp objects stably and reliably with different shapes.
- (2)
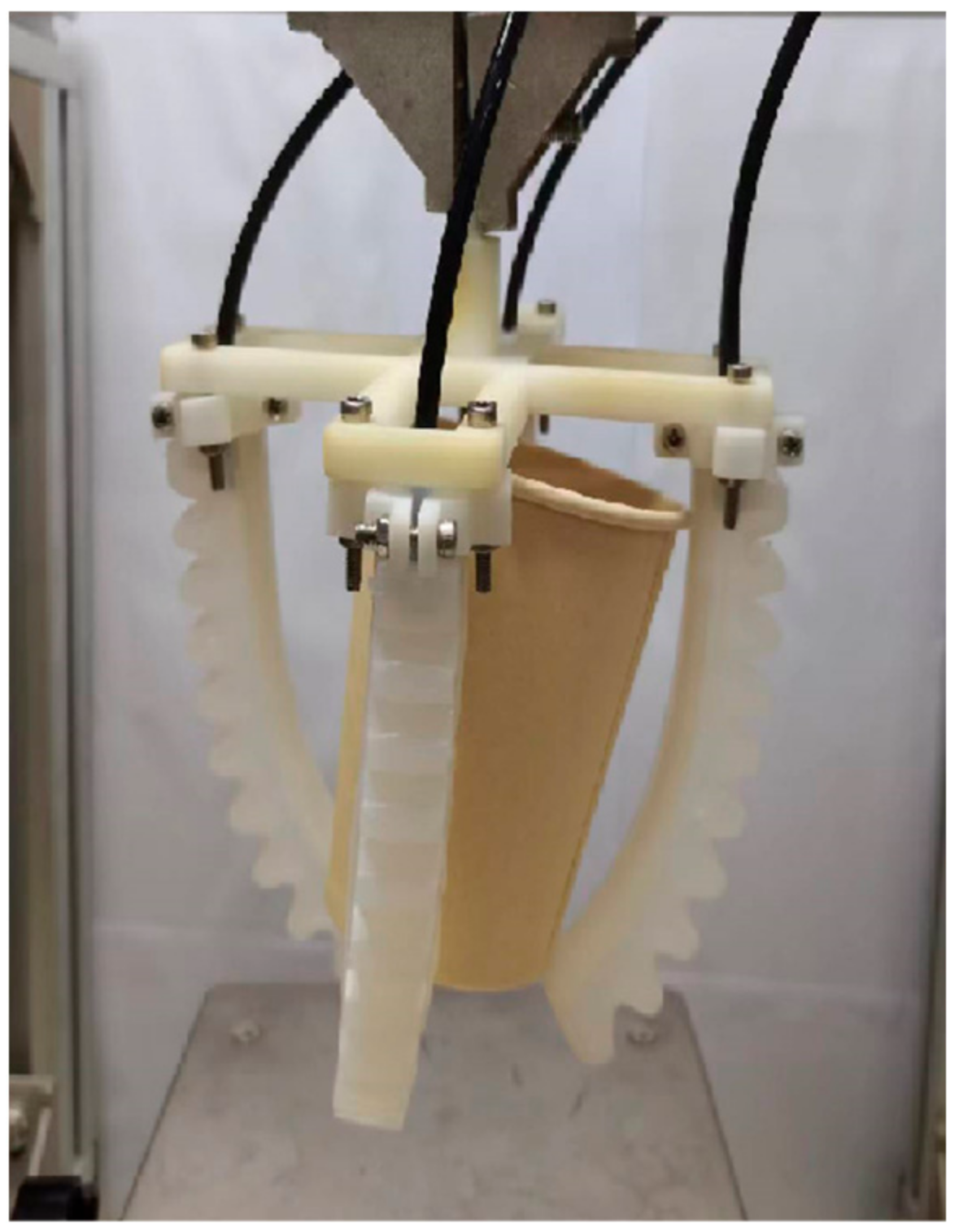
- The positions of seven chucks at the connection between the fixture and the actuator can be adjusted, and the bolt is used to tighten the connection after a certain position is determined. When the size of the grasping object changes, the soft gripper does not need to change the fixture, which can be realized by adjusting the position of the card interface connection on the fixture. When the size of the grasping object changes, the position of the bayonet connection on the fixture of the soft gripper is adjusted without the change of the fixture, which is shown in the Figure 3.
- (3)
- The manipulator possesses strong versatility and practicability with low cost, good flexibility, and easy operation.
- (4)
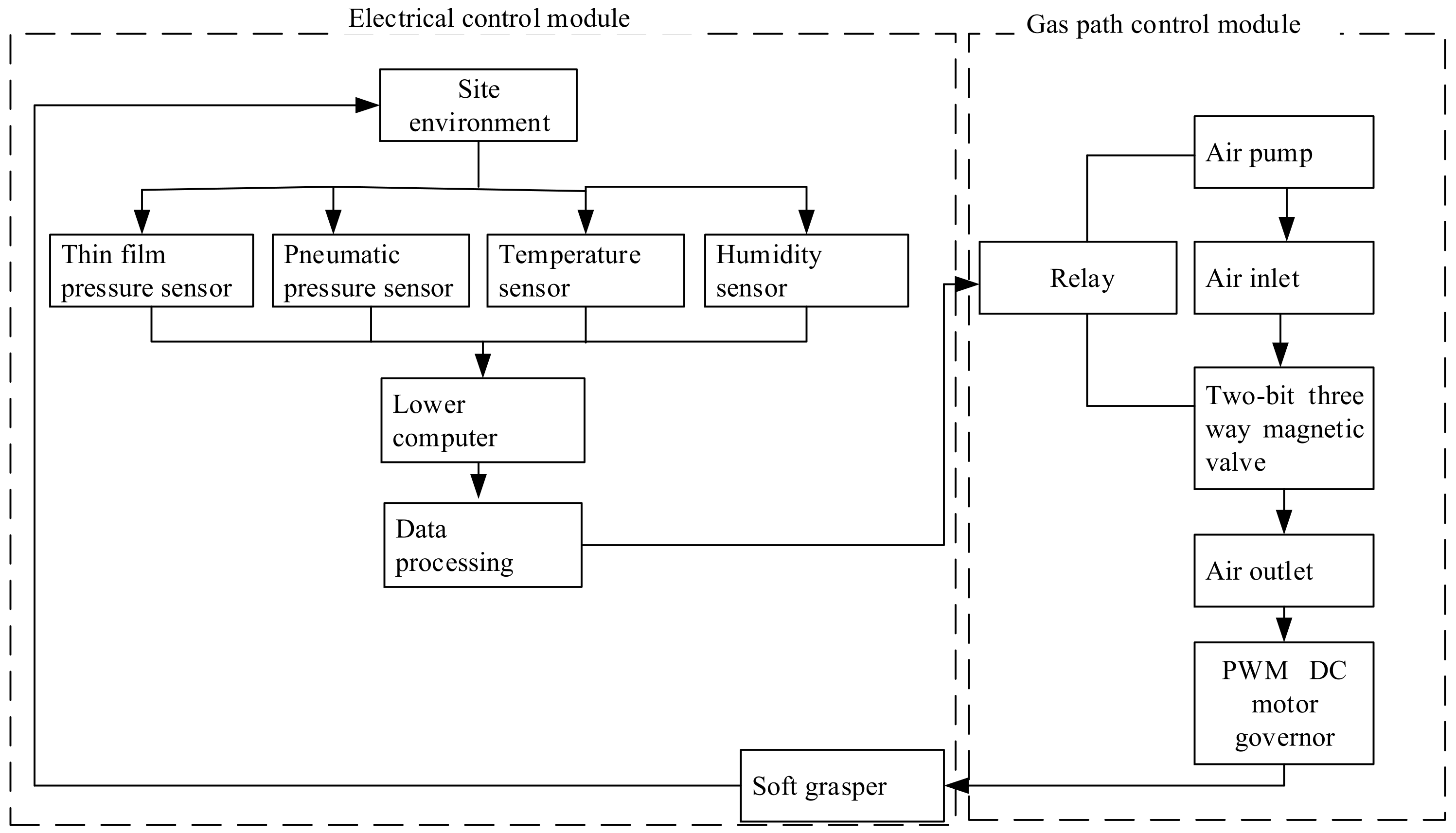
- The structure of the soft gripper is optimized, and the control and monitoring of the soft gripper are realized through the electrical control module, air circuit control module, and the sensor group module. Among them, the electrical control module controls the release and retention of pressure in the gas path and realizes data display, instruction sending, early warning prompt, and emergency stop button through the man–machine interface. In the multi-sensor module, the pressure sensor measures the input gas pressure. The film pressure sensor measures the pressure on the soft gripper. The temperature and humidity sensors measure the temperature and humidity of the environment. The gas path module is mainly used to control the gas pressure and velocity of the soft gripper in which the size of the airflow velocity can be controlled by PWM DC speed regulation. In addition, the control system designed by multi-module avoids the limitation of single control and guarantees stable grasping of the soft gripper.
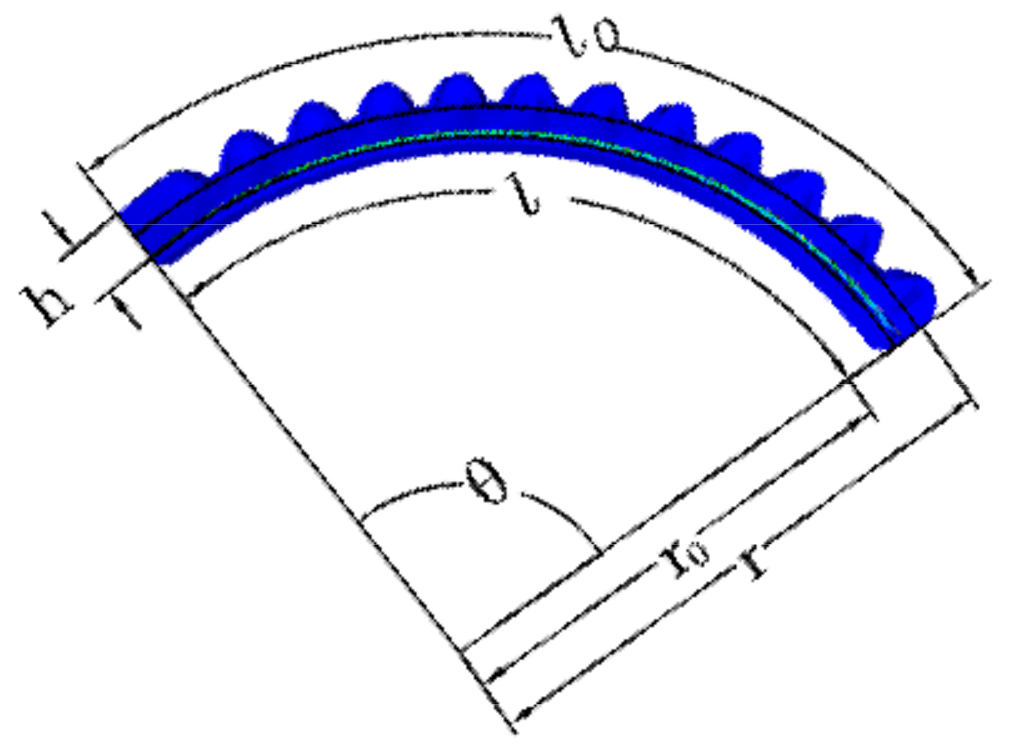
3. Kinematics Model of Soft Gripper
4. Finite Element Simulation of Multi-Cavity Pneumatic Gripper
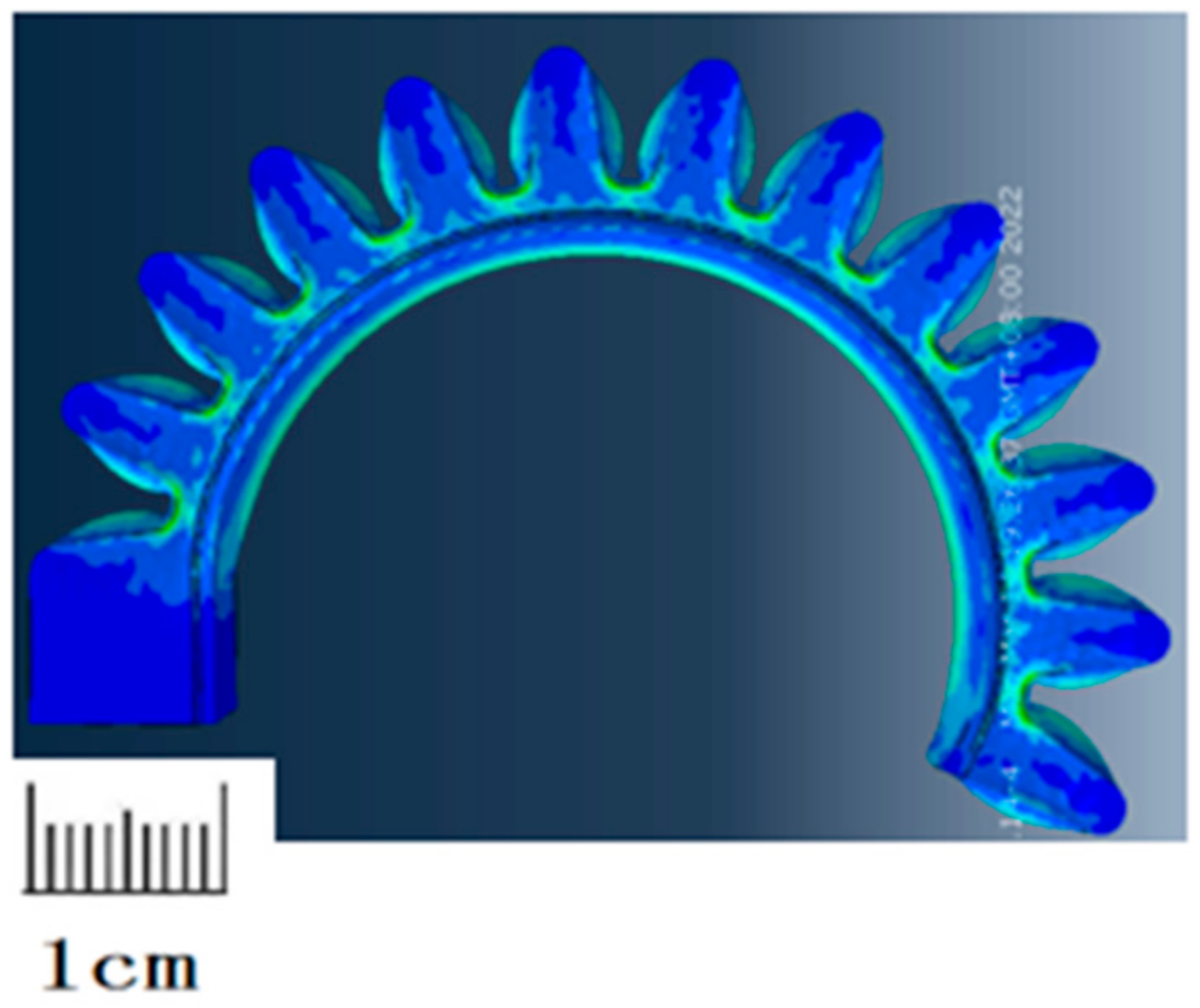
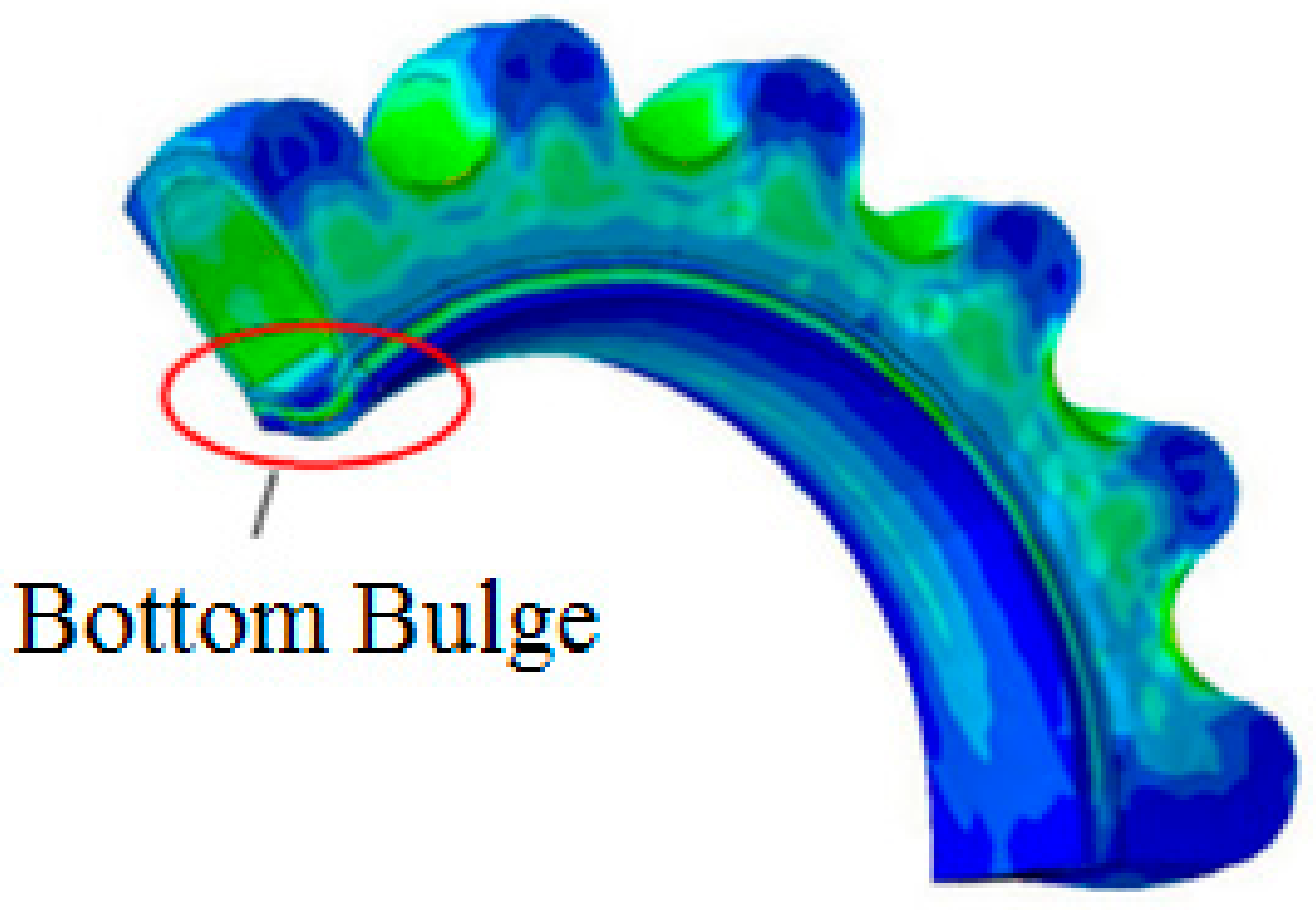
4.1. Simulation of the Bending Deformation of Soft Actuator under Air Pressure
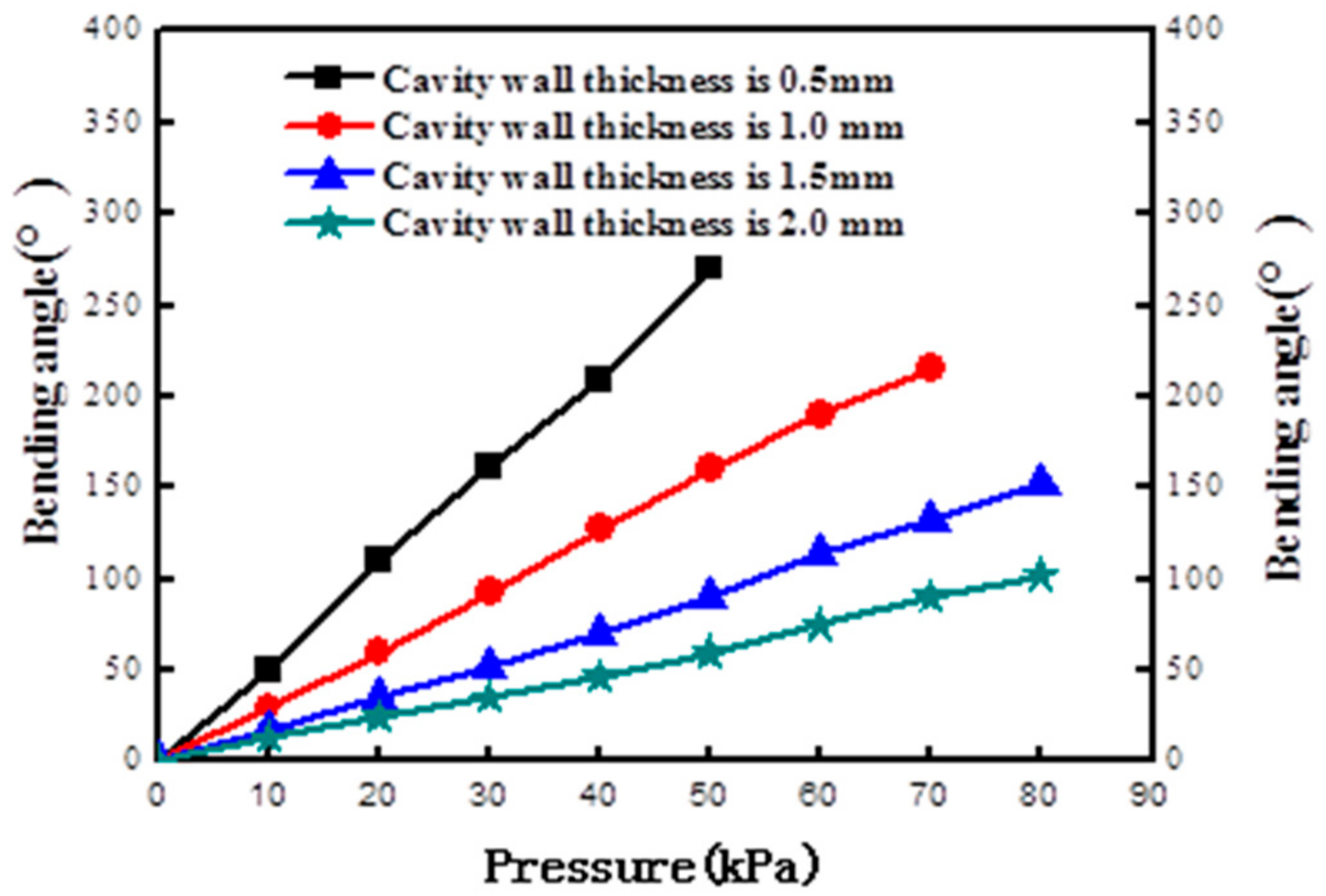
4.2. Simulation of Wall Thickness and Bending Angle of Soft Actuator Cavity
4.3. Influence of Cavity Height on Bending Angle of Soft Actuator
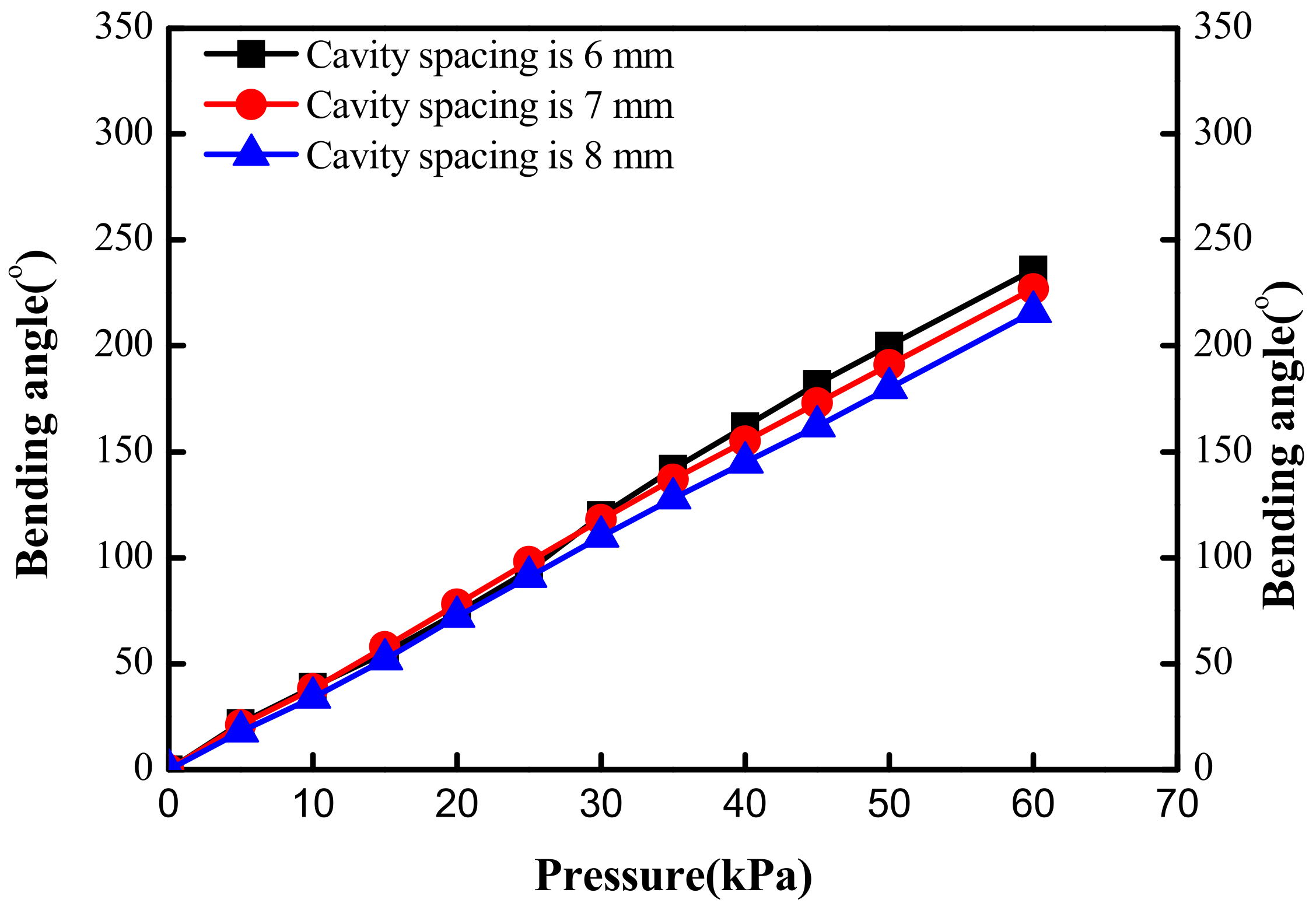
4.4. Influence of Cavity Spacing on Bending Angle of Soft Actuator
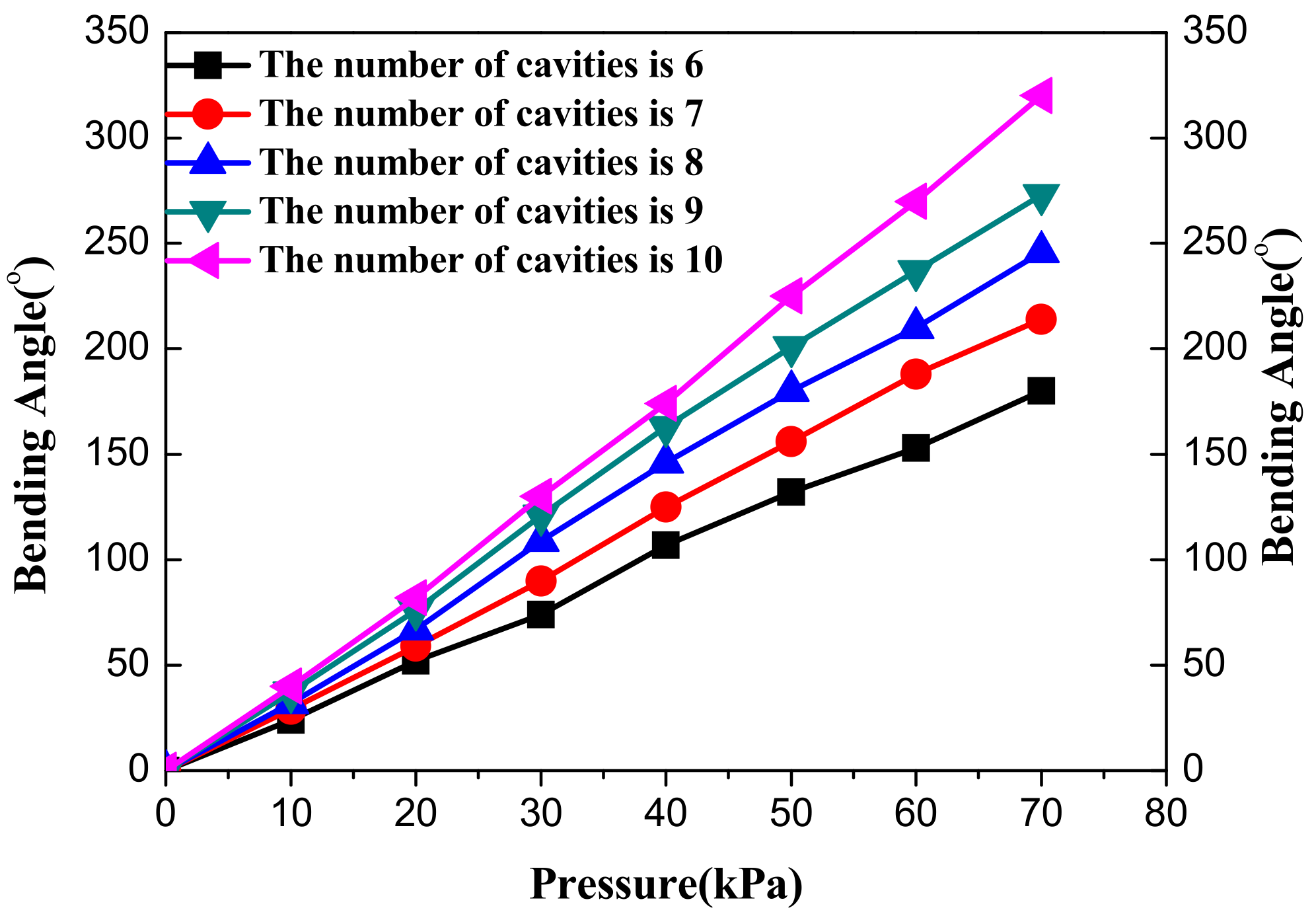
4.5. Effect of the Number of Cavities on Bending Angle of Soft Actuator
4.6. Influence of Lower Wall Thickness on Bending Angle of Soft Driver
4.7. Simulation of Grasping Objects with Soft Gripper
5. Performance Test of Soft Gripper
5.1. Check for Air Tightness of Soft Actuator
5.2. Determination of Fatigue Limit
5.3. Relationship between Bending Angle and Pressure
5.4. Diameter Test of Grabbing Object by Soft Actuator
5.5. Grasping Quality Test
5.6. Multi-Objective Grasping Capability Test
6. Conclusions
- (1)
- Firstly, ABAQUS finite element software was used to model the soft gripper of the soft robot in a specific environment. In addition, the calculation and analysis were carried out on the thickness of the air cavity of the soft gripper, the distance between adjacent air cavities, the height of the air cavity, the number of air cavities, and the thickness of the bottom. Through the simulation analysis of the bending deformation factors of the soft gripper, the theoretical basis for the preparation of the soft gripper was determined. Through simulation, it is analyzed that the soft gripper was bent and deformed by changing the air pressure in the cavity to improve the load capacity of the gripper and realize the application in various scenarios.
- (2)
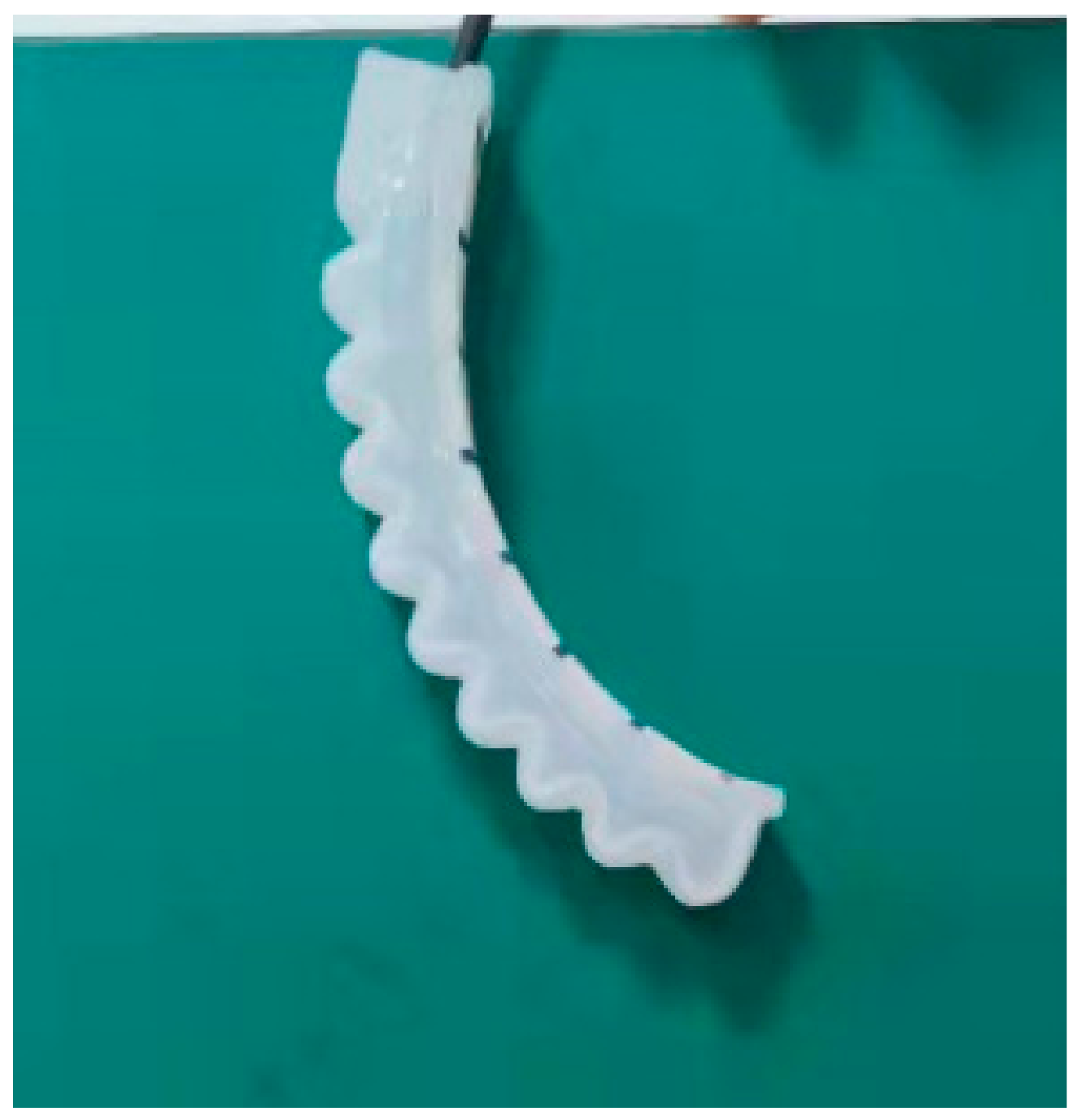
- Secondly, the mold for the preparation of the soft gripper was designed by UG software, and the 3D printer mold was used as the actuator by the injection molding method. A fixture that can automatically adjust the distance between the software claws was made. This fixture is combined with the soft gripper, which enables the manipulator to present strong versatility, practicability, efficiency, good flexibility, and easy operation.
- (3)
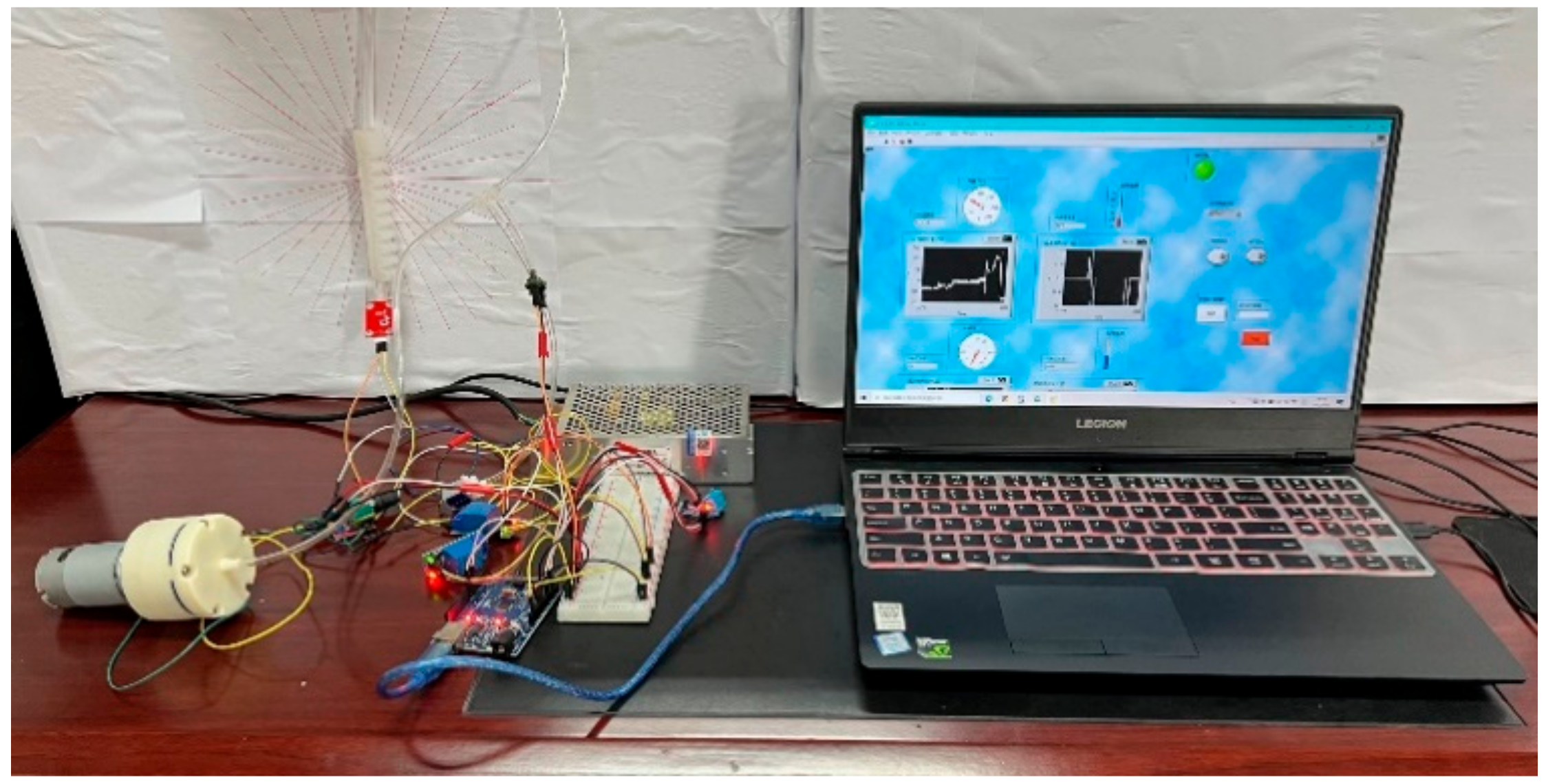
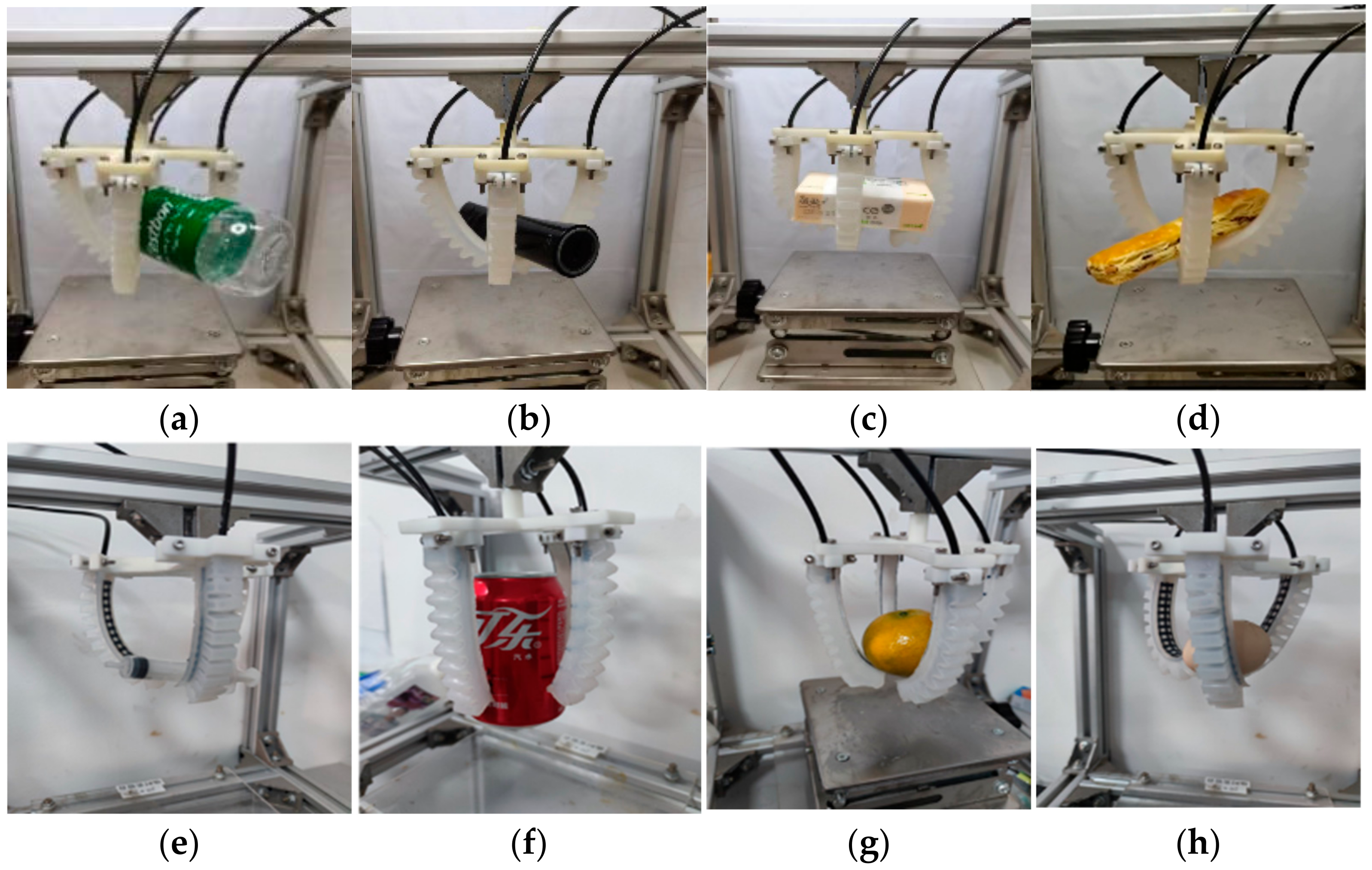
- Finally, a variety of electronic equipment were applied to design a computer control system and build an experimental platform to test the actual operation performance of the soft gripper. The results show that the soft gripper can flexibly grasp and release objects of various shapes through the control system, and can detect real-time pressure, intensity of pressure, temperature, and humidity. Additionally, the loading capacities of the three-finger and four-finger soft grippers were quantitatively verified. Therefore, the soft gripper has industrial applicability in specific environments, especially in the screening and handling of vulnerable objects and precision instruments. Besides, it has special use in the detection of toxic and harmful scenes and the handling of dangerous bombs in the military field.
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. Int. Ed. 2011, 50, 1890–1895. [Google Scholar] [CrossRef] [PubMed]
- Deimel, R.; Brock, O. A Novel Type of Compliant and Under actuated Robotic Hand for Dexterous Grasping. Int. J. Rob. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Wang, T.; Hong, J.; Wang, M.Y. Review of Soft-bodied Manipulator. J. Mech. Eng. 2017, 7, 19–28. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Polygerinos, P.; Overvelde, J.T.; Galloway, K.C.; Bertoldi, K.; Walsh, C.J. Interaction Forces of Soft Fiber Reinforced Bending Actuators. IEEE/ASME Trans. Mechatron. 2017, 22, 717–727. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Morin, S.A.; Stokesa, A.A.; Mazzeo, A.D.; Chen, X.; Wanga, M.; Whitesides, G.M. Multigait Soft Robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft Robotic Glove for Combined Assistance and At-home Rehabilitation. Rob. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a Soft Pneumatic Glove for Hand Rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Song, S.H.; Ahn, S.H.; Park, C.H.; Son, Y.S. Design of Soft Actuator Using 3D-printed Composite. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 28 June–1 July 2017; pp. 79–80. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics That Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Shapiroa, Y.; Wolf, A.; Gabor, K. Bi-bellows: Pneumatic Bending Actuator. Sens. Actuators A Phys. 2011, 167, 484–494. [Google Scholar] [CrossRef]
- Wang, T.Y.; Ge, L.; Gu, G.Y. Programmable Design of Soft Pneu-net Actuators With Oblique Cavitys can Generate Coupled Bending and Twisting Motions. Sens. Actuators A Phys. 2018, 271, 131–138. [Google Scholar] [CrossRef]
- Wang, Z.K.; Zhu, M.Z.; Kawamura, S.; Hirai, S.C. Comparison of Different Soft Grippers for Lunch Box Packaging. Robot. Biomim. 2017, 4, 10. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltzc, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal Robotic Gripper Based On the Jamming of Granular Material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef] [Green Version]
- Li, H.L.; Yao, J.T.; Zhou, P.; Chen, X.B.; Xu, Y.D.; Zhao, Y.S. High-Load Soft Gripper Based on Bionic Winding Effect. Soft Robot. 2019, 6, 276–288. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, X.H.; Chen, X.T.; Wang, Z.C.; Jin, Y.S.; Chen, X.P. Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 350–356. [Google Scholar] [CrossRef]
- Hao, Y.F.; Gong, Z.Y.; Xie, Z.X.; Guan, S.Y.; Yang, X.B.; Ren, Z.Y.; Wang, T.M.; Wen, L. Universal Soft Pneumatic Robotic Gripper with Variable Effective Length. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; Volume 8, pp. 6109–6114. [Google Scholar] [CrossRef]
- Renda, F.; Giorelli, M.; Calisti, M.; Cianchetti, M.; Laschi, C. Dynamic Model of a Multibending Soft Robot Arm Driven by Cables. IEEE Trans. Robot. 2014, 30, 1109–1122. [Google Scholar] [CrossRef]
- Kim, H.I.; Han, M.W.; Wang, W.; Song, S.H.; Rodrigue, H.; Ahn, S.H. Design and Development of Biome-Meticsoft Robotic Hand with Shape Memory Alloy. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 2330–2334. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J.; Ding, G.; Wang, Y. Design of nonlinear predictive control for pneumatic muscle actuator based on echo state Gaussian process. IFAC-PapersOn-Line 2017, 50, 1952–1957. [Google Scholar] [CrossRef]
- Chavoshian, M.; Taghizadeh, M.; Mazare, M. Hybrid Dynamic Neural Network and PID Control of Pneumatic Artificial Muscle Using the PSO Algorithm. Int. J. Autom. Comput. 2020, 17, 428–438. [Google Scholar] [CrossRef]
- Wang, H.S.; Chen, W.D.; Yu, X.J.; Deng, T.; Wang, X.Z.; Pfeifer, R. Visual Servo Control of Cable- driven Soft Robotic Manipulator. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar] [CrossRef]
- Sun, Z.S.; Guo, Z.H.; Tang, W. Design of Wearable Hand Rehabilitation Glove with Soft Hoop-Reinforced Pneumatic Actuator. J. Cent. South Univ. 2019, 26, 106–119. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size Parameters | Value (mm) |
|---|---|
| Length of the soft actuator (L/mm) | 85 |
| Height of the soft actuator (H/mm) | 10 |
| Height of the air cavity (w/mm) | 2 |
| Outer width of the air cavity (w/mm) | 10 |
| Inner width of the air cavities (d/mm) Limiting layer thickness | 6 1.5 |
| Base thickness (t/mm) | 2 |
| arc radius (r/mm) | 3 |
| Air pressure (kPa) | 0–65 |
| Actuators materials | Dragion 30, E610 |
| Number | Times |
|---|---|
| 1 | 210 |
| 2 | 230 |
| 3 | 197 |
| 4 | 242 |
| 5 | 199 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, J.; Ge, Z.; Fan, P.; Zou, W.; Jiang, T.; Dong, L. Design and Manufacture of a Flexible Pneumatic Soft Gripper. Appl. Sci. 2022, 12, 6306. https://doi.org/10.3390/app12136306
Lei J, Ge Z, Fan P, Zou W, Jiang T, Dong L. Design and Manufacture of a Flexible Pneumatic Soft Gripper. Applied Sciences. 2022; 12(13):6306. https://doi.org/10.3390/app12136306
Chicago/Turabian StyleLei, Jing, Zhenghao Ge, Pengju Fan, Wang Zou, Tao Jiang, and Liang Dong. 2022. "Design and Manufacture of a Flexible Pneumatic Soft Gripper" Applied Sciences 12, no. 13: 6306. https://doi.org/10.3390/app12136306
APA StyleLei, J., Ge, Z., Fan, P., Zou, W., Jiang, T., & Dong, L. (2022). Design and Manufacture of a Flexible Pneumatic Soft Gripper. Applied Sciences, 12(13), 6306. https://doi.org/10.3390/app12136306