Extraction of Catastrophe Boundary and Evolution of Expressway Traffic Flow State

Abstract
:1. Introduction
2. Analysis of Catastrophe Characteristics of Traffic Flow
2.1. Cusp Catastrophe Theory
- (1)
- Coordinate translation:where is the optimal speed at maximum traffic volume (km·h−1), is the maximum traffic (), and is the time occupancy at maximum traffic volume ().
- (2)
- Coordinate rotation:where m is the graphic factor, whose value is , and is the rotation angle (°).
2.2. Analysis of Catastrophe Characteristics of Traffic Flow
- (1)
- Simulation scenario: According to the survey results, the mainline of the expressway was a two-way six-lane straight section, the length of the weaving section was 210 m, the lane width was 3.75 m, and the simulation interval was 1000 m.
- (2)
- Traffic volume: According to the actual investigation, it was found that the traffic volume in this weaving section was 1200–3700 pcu/h in 1 day; thus, the calibration simulation traffic volume was 1000–4000 pcu/h, the step length was 500 pcu/h, and the simulation time of each interval step length was 3600 s.
- (3)
- Weaving volume ratio: In order to study the congestion characteristics of the weaving section, according to the “Highway Capacity Manual”, the maximum weaving volume ratio for a weaving section with four lanes was selected as 0.35.
- (4)
- Traffic composition: According to the actual survey results, there were few large vehicles on expressways in the city, with small vehicles accounting for 0.98 and large vehicles accounting for 0.02.
- (5)
- Expected speed: According to the actual investigation results, the expected speed of the mainline of the expressway was set as 80 km/h, and the expected speed of the ramp was set as 40 km/h. The vehicle speed conformed to a Weibull distribution.
- (6)
- Driver behavior: The action point model of the Vissim simulation platform was used to describe the drivers’ behavior.
- (7)
- Data detection: According to the “Highway Capacity Manual”, the weaving section ranged from 0.6 m upstream of the convergence triangle to 3.7 m downstream of the separation triangle. The weaving section was divided into inner, middle, and outer lanes. The equidistant segmentation method is adopted. Starting from the separation triangle, data detection points were set every 5 m to the upstream point, with a total of 129 detectors. The test sections were numbered in sequence. The data detection interval was 30 s.
- (8)
- Data output: The traffic volume, time occupancy, and average speed were taken as the output in intervals.
- (1)
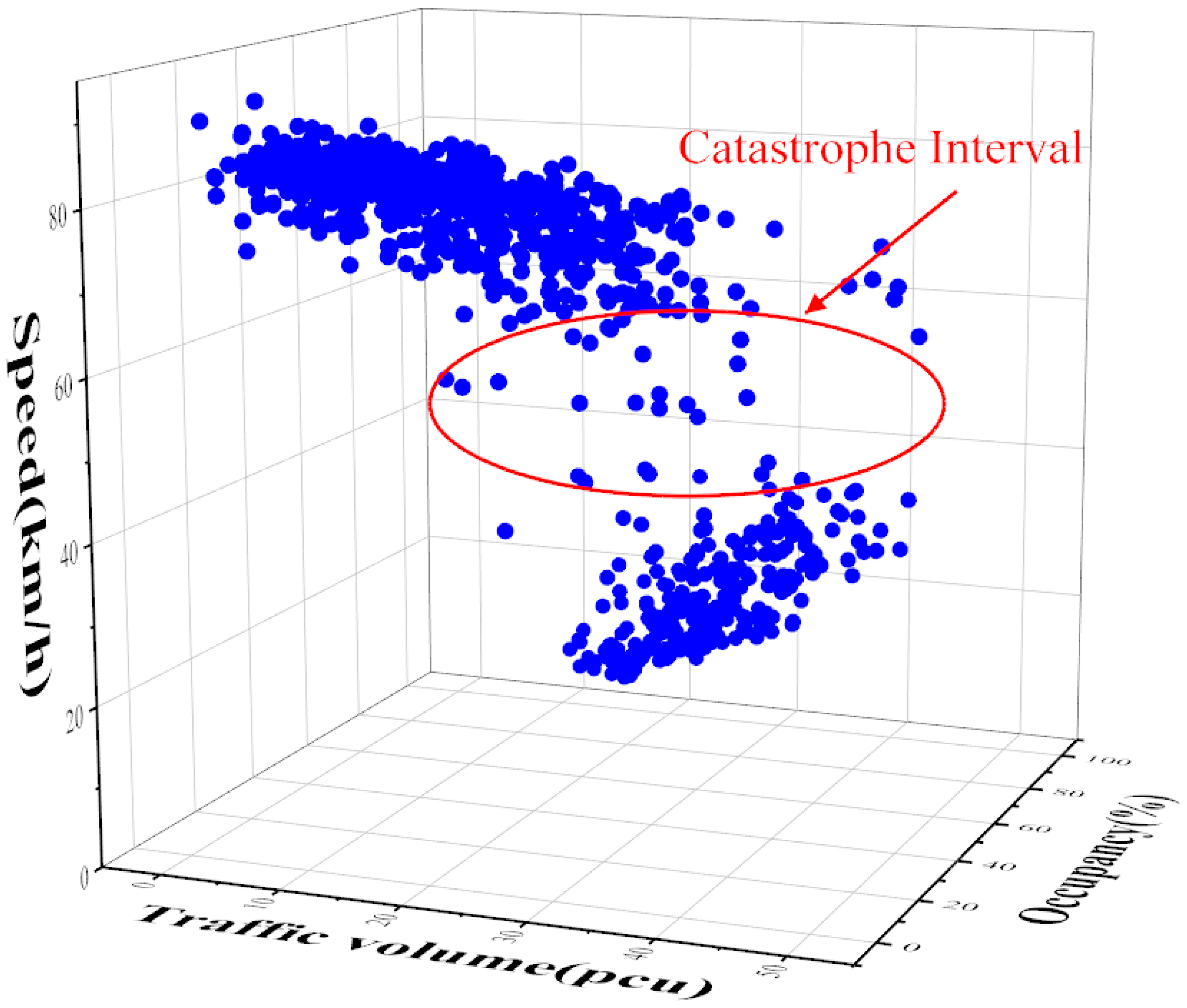
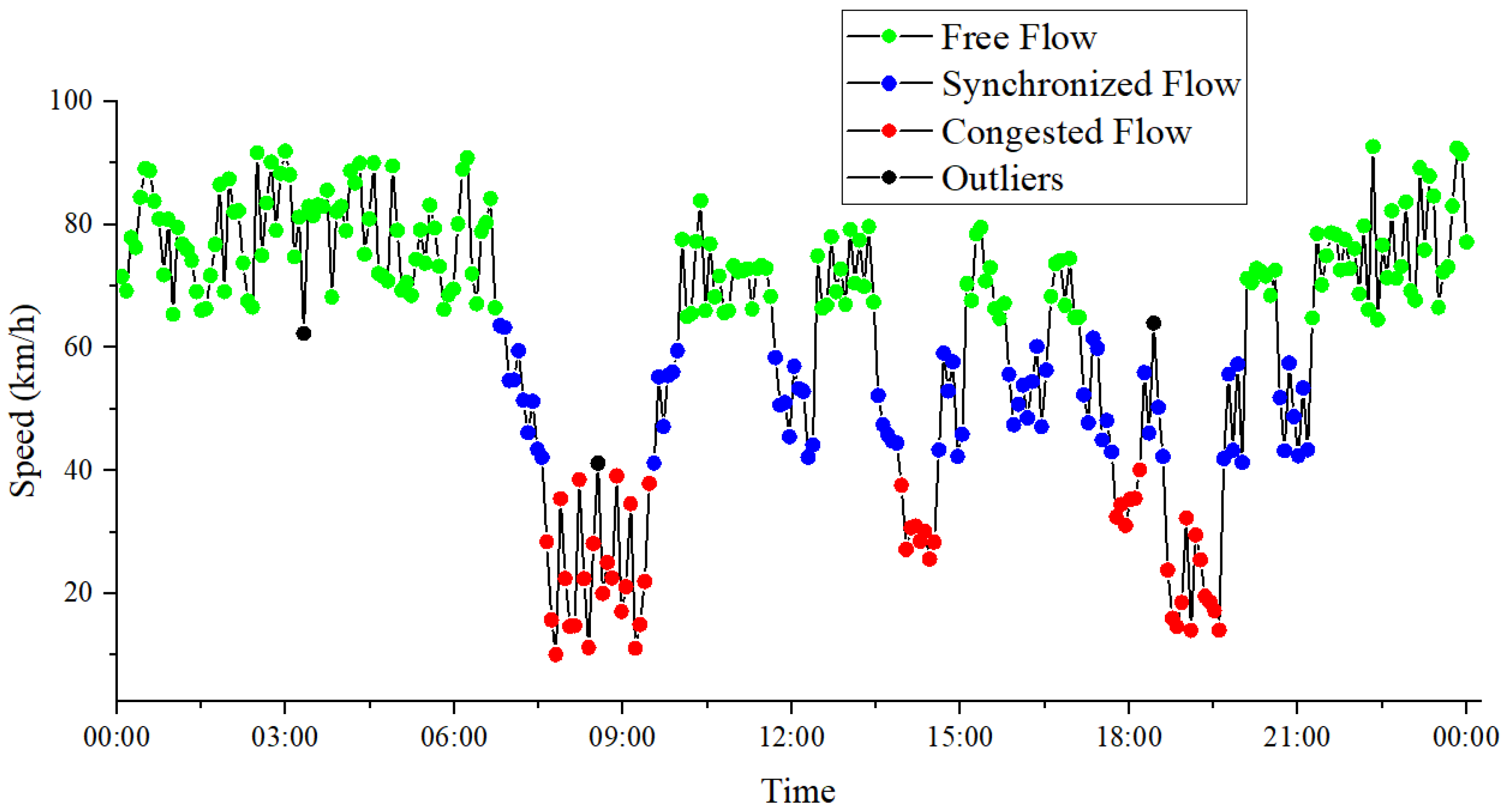
- The distribution of traffic flow parameters in free flow and congested flow was relatively concentrated, and the speed change between the two states was discontinuous. The state of traffic flow indicated a catastrophe;
- (2)
- The speed interval between free flow and congestion flow, i.e., the catastrophe interval, had few data points. In this interval, the traffic flow state changed effortlessly, highlighting the unreachability of the catastrophe interval;
- (3)
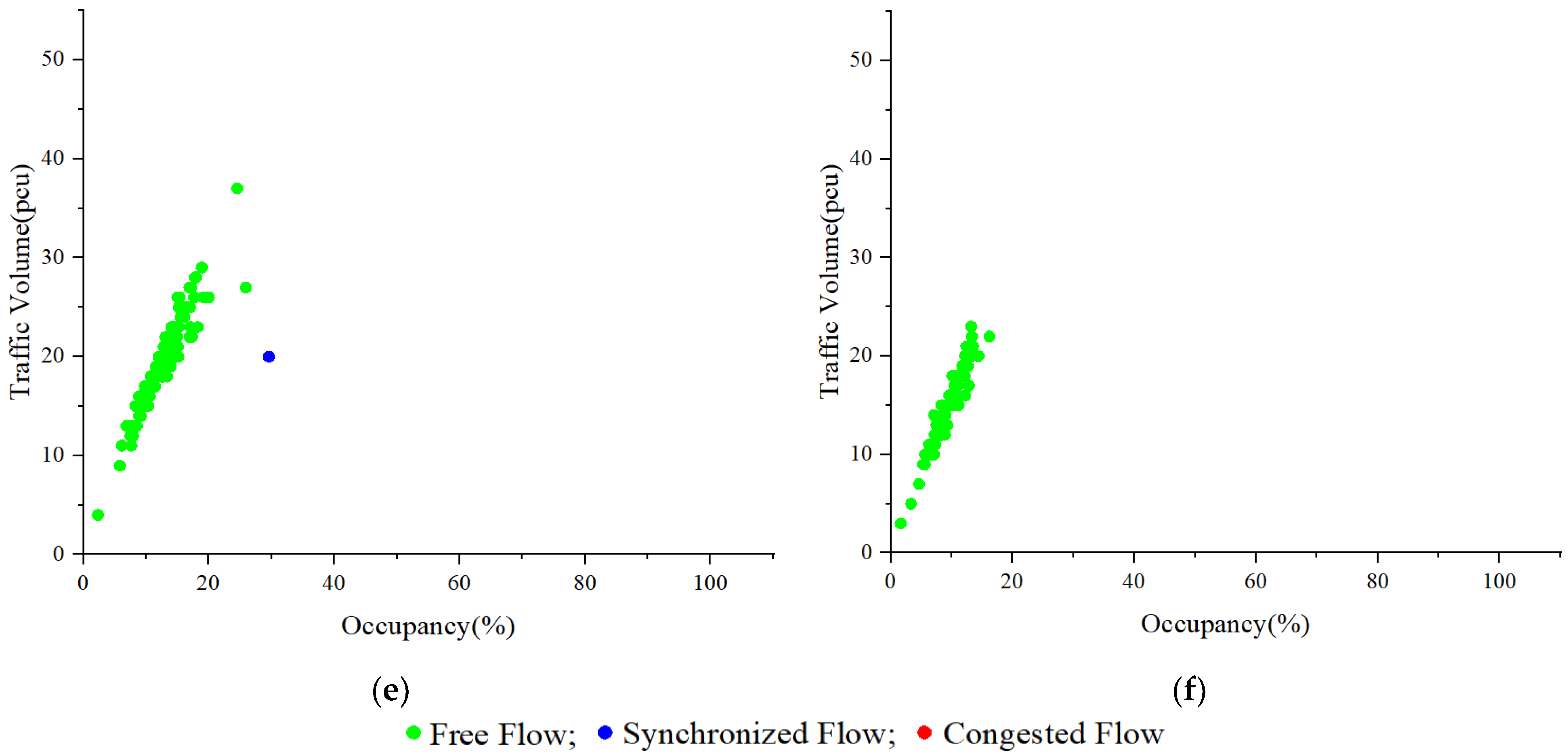
- Under the same traffic volume, there were two different corresponding speeds, and the traffic flow states corresponding to these two speeds were different. There were two steady states of traffic flow, showing a dual modality.
3. Catastrophe Boundary Extraction with Spectral Clustering Analysis Algorithm
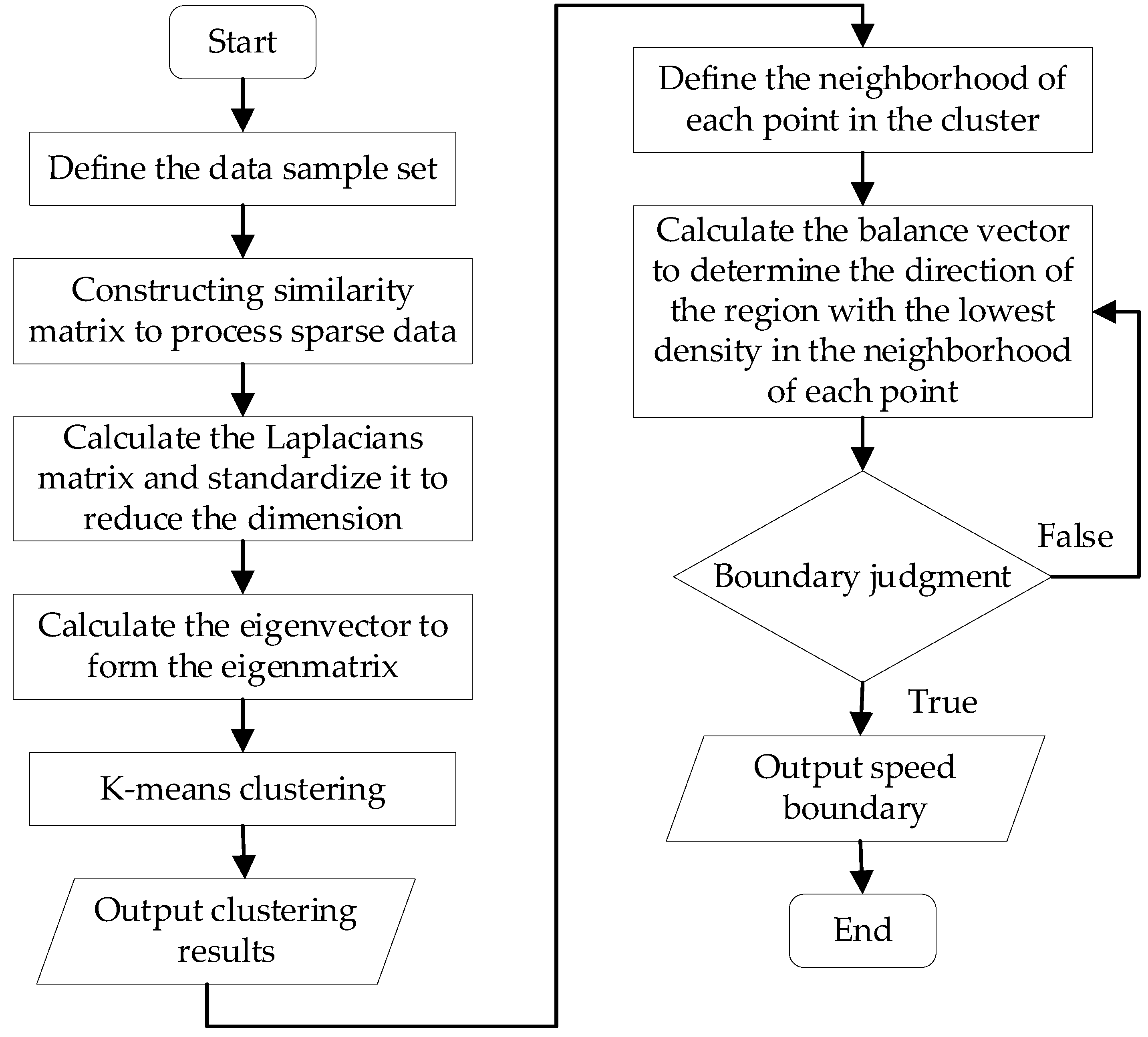
3.1. Analysis of Catastrophe Characteristics of Traffic Flow
- (1)
- Define the data sample set.where is the i-th sample point in the data.
- (2)
- Take the data to scatter points as an overall network graph, where each scatter point is a node in the network graph, and the connected nodes are edges in the network graph. The similarity between nodes is the weight value of the edge. The similarity calculation formula is as follows:where is the sample standard deviation, and the value is 0.9.
- (3)
- Arrange the similarity into a similarity matrix.To exclude self-similarity, make the diagonal of matrix w equal to 0.
- (4)
- In order to prevent a single node from being eliminated in the iterative process, a normalized diagonal matrix D is established.
- (5)
- Calculate the Laplacian matrix.
- (6)
- Determine the number of clusters as K; K = 3, representing free flow, synchronized flow, and congested flow. Arrange the vectors with the largest eigenvalues of the first K into the eigenmatrix U.where is the first K eigenvector.
- (7)
- Normalize the eigenmatrix to get matrix Y.
- (8)
- Using each row vector in the matrix Y as a data point, perform clustering through the K-means algorithm, thus obtaining K clustering results .
3.2. Clustering Boundary Extraction
3.3. Analysis of Traffic Characteristics
3.4. Example Verification
4. Analysis of Evolution Law of Traffic Flow State
4.1. Formation Law of Traffic Flow Congestion
- (1)
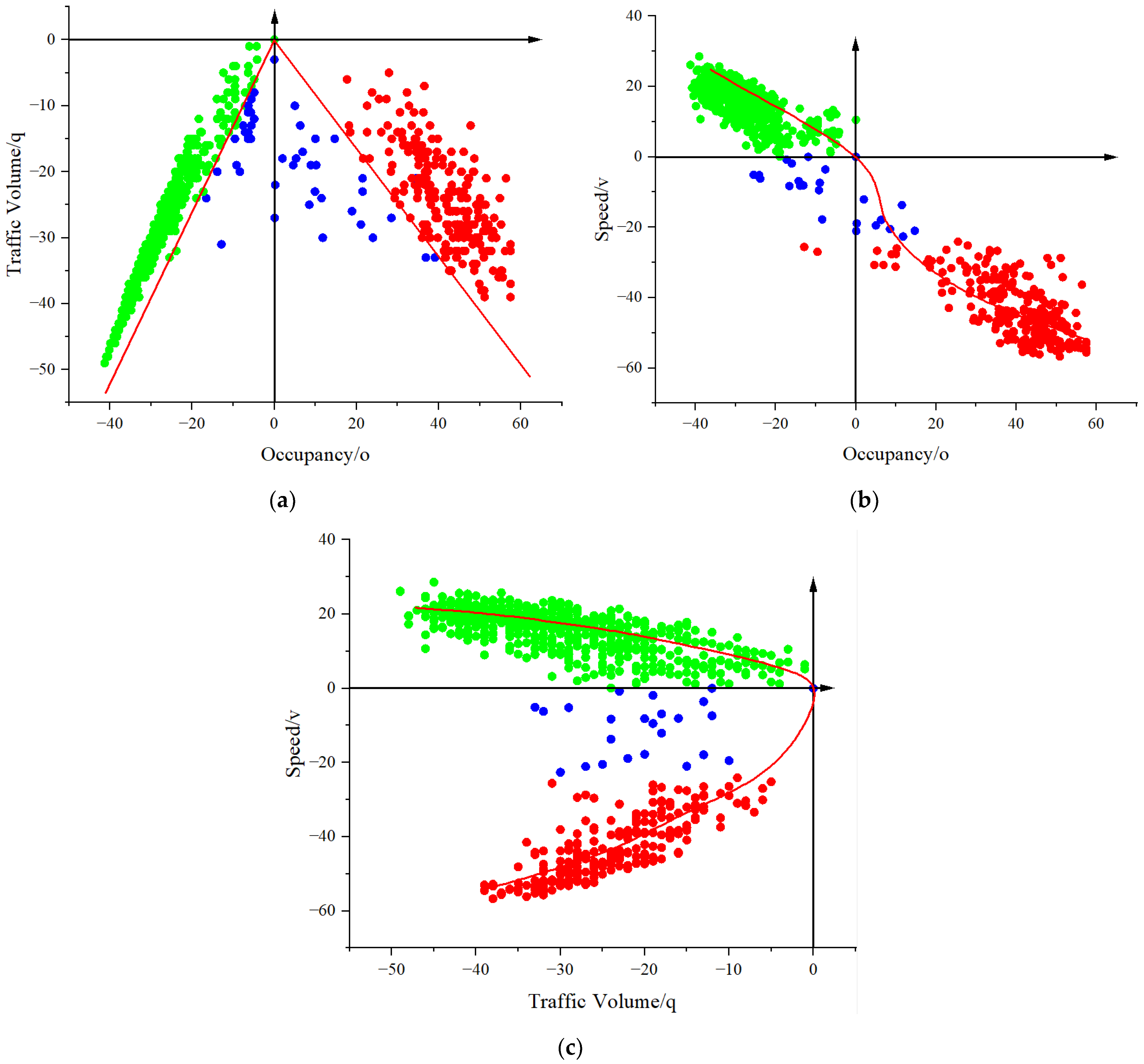
- Analysis of the relationship between traffic volume and occupancy
- (2)
- Analysis of the relationship between speed and occupancy
- (3)
- Analysis of the relationship between speed and traffic volume
4.2. Dissipation Law of Traffic Flow Congestion
4.3. Temporal and Spatial Evolution Characteristics of Traffic Flow State
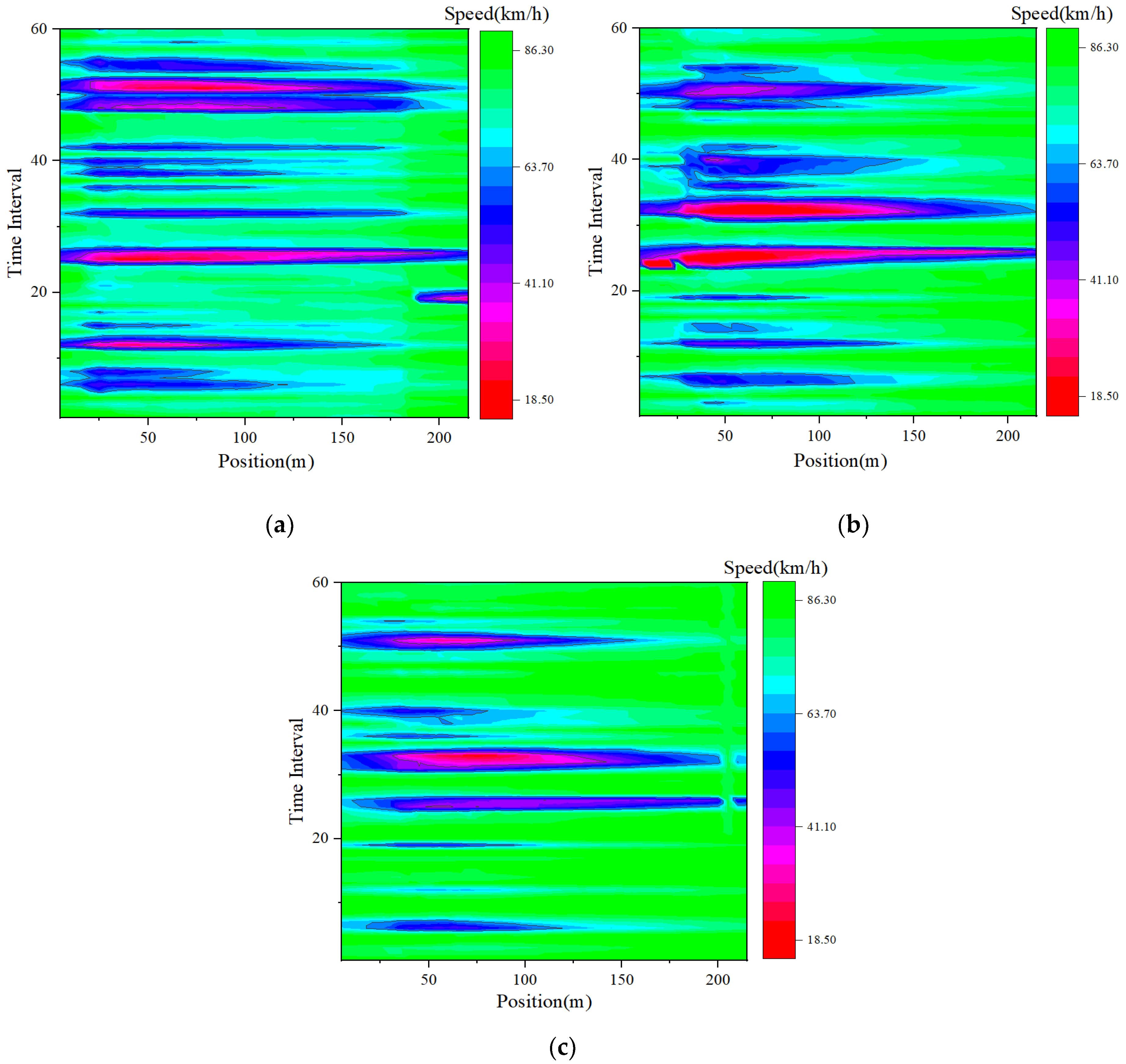
- (1)
- For the outer lane, the traffic flow at the entrance of the weaving section evolved into traffic congestion only once. This is because most vehicles could find a gap to freely change lanes during the acceleration process in the weaving lane. These vehicles did not have much impact on the overall traffic flow. Only a few vehicles forcibly changed lanes to enter the mainline when vehicle acceleration was not completed and a gap was not found. This resulted in a traffic flow speed catastrophe, forming a bottleneck in the entrance area. When conservative traffic participants do not find a gap during driving in the weaving lane, they continue to drive in this lane until the exit, before stopping and waiting on the opportunity to change lanes. This results in a traffic flow speed catastrophe, causing congestion at the exit.
- (2)
- For the middle lane, since the continuous lane-changing of an entry vehicle into the inner lane rarely occurs after entering the weaving section, there was no congestion near the entrance during the simulation. In the vicinity of the exit, some vehicles in the weaving lane changed lanes into the outer lane, while some vehicles in the outer lane intended to change lanes inward. Thus, some vehicles in the inner lane made a forced lane change near the exit without a suitable gap, thus hindering traffic flow in the middle lane. Therefore, there were more speed catastrophes near the exit in the middle lane than in the outer lane. Moreover, in the congested state, due to the joint obstruction of the outer lane and the inner lane, the congestion in the middle lane lasted longer, and the congestion dissipated more slowly.
- (3)
- For the inner lane, similar to the middle lane, no vehicle was forced to change lanes continuously to enter the inner lane without finding a gap during the simulation; hence, there was no speed catastrophe near the entrance. When the traffic volume is too large, vehicles in the inner lane trying to exit the expressway stop near the exit and wait for a lane change, which affects the upstream traffic flow and leads to a speed catastrophe near the exit. However, the inner lane is less affected by the outer lane and middle lane; in most cases, it is only affected by vehicles leaving the lane. Therefore, its traffic flow is smoother than the other two lanes, and there are fewer speed disasters and congestion events.
- (4)
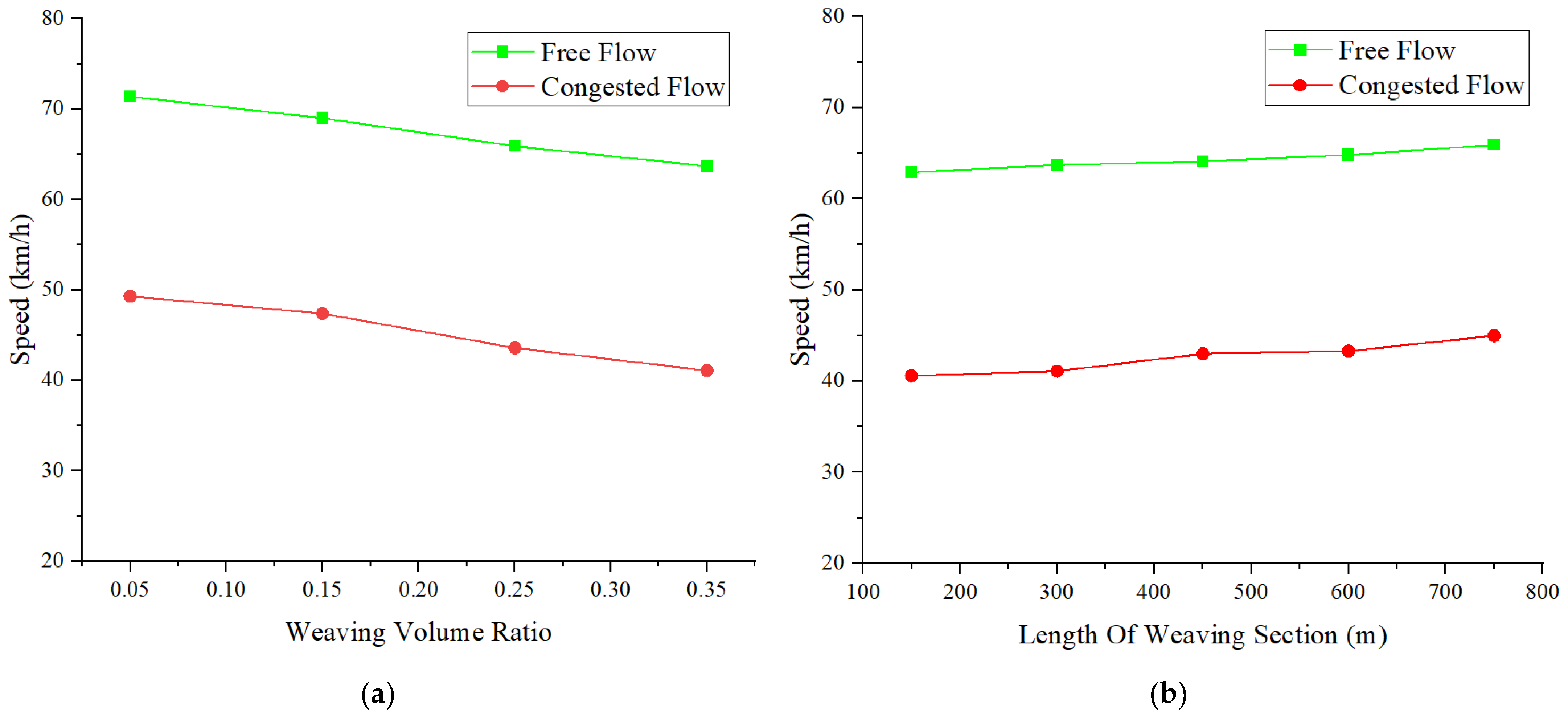
- When the structure of the weaving section changes, such as the length of the weaving section and the number of expressway lanes, the evolution trend of traffic flow will not change. However, when the space in the weaving section is increased, the vehicles have more sufficient lane change gaps, the traffic flow has higher efficiency, and the number of traffic jams is decreased. Similarly, when the length of the weaving section and the number of lanes are reduced, the number of traffic jams and the duration of congestion are increased.
5. Conclusions
- (1)
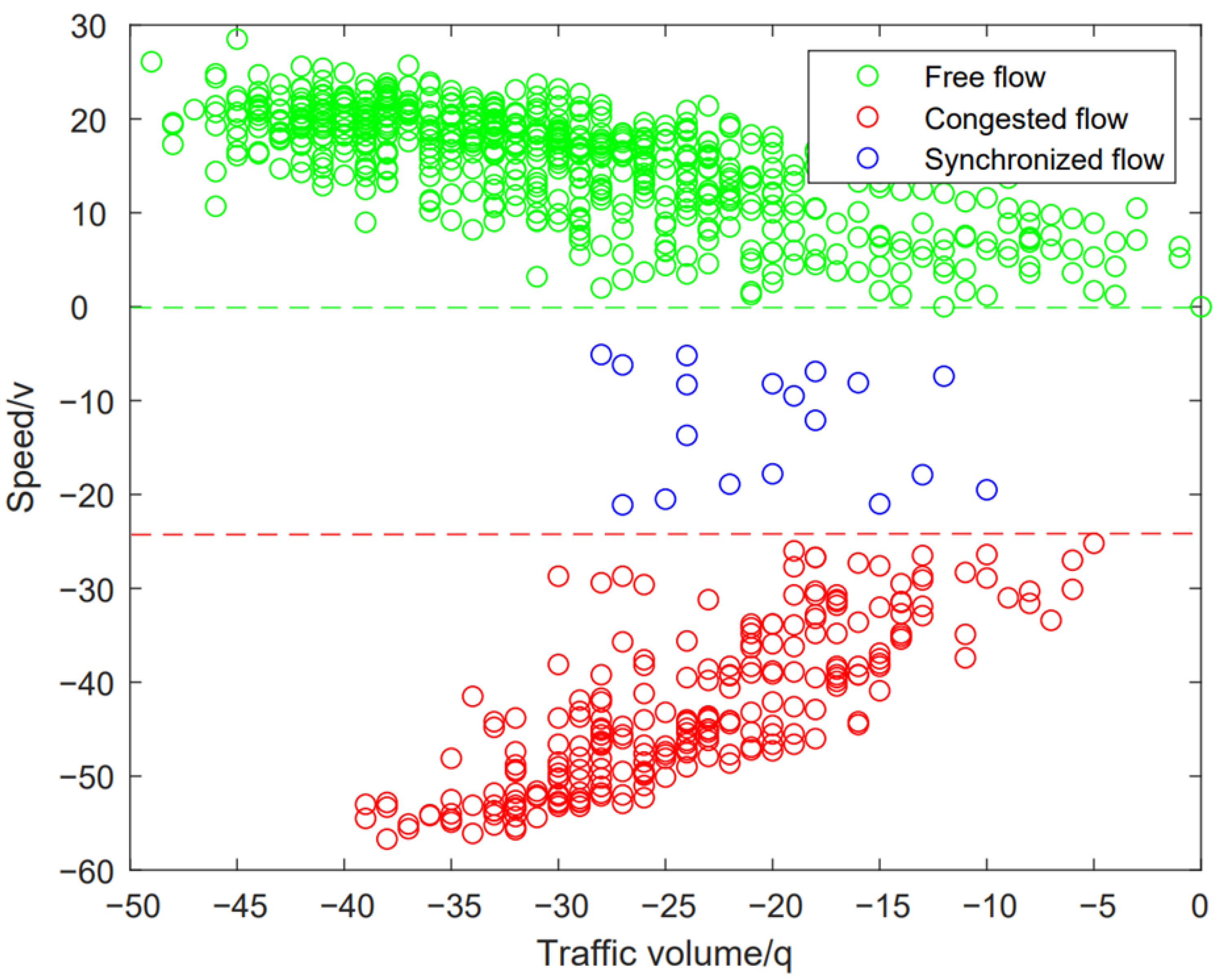
- In the evolution process of traffic flow state, there are two relatively stable traffic flow states: free flow and congested flow. There are apparent crack areas between the two traffic flow states, indicating a catastrophe in the evolution process of traffic flow.
- (2)
- Spectral clustering analysis algorithm can address the inability of the traditional clustering algorithm to deal with non-spherical cluster data and effectively extract the catastrophe boundary of traffic flow according to the node similarity of the network graph. The accuracy achieved in this study was 98.96%.
- (3)
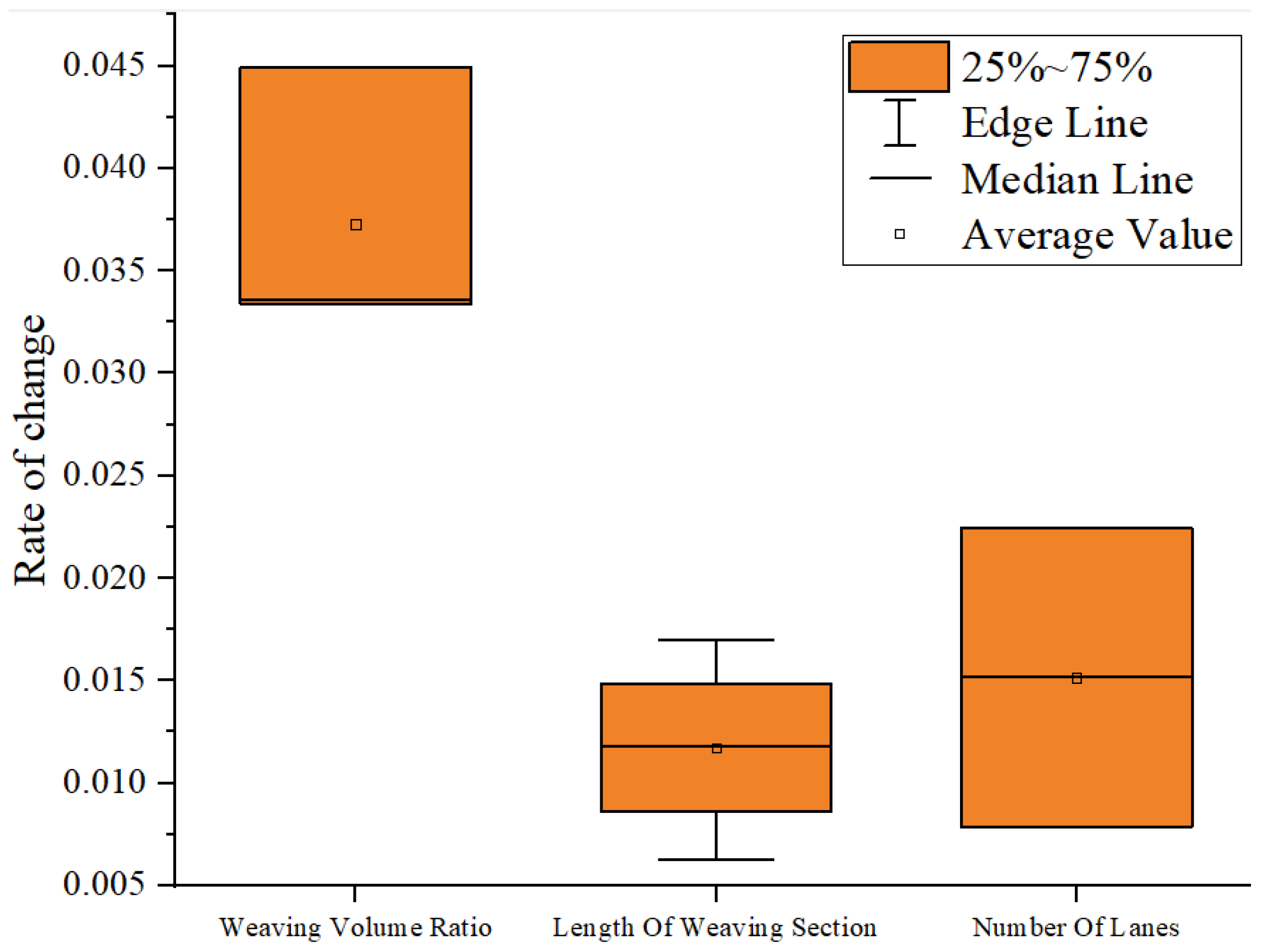
- The catastrophe boundary of the traffic flow state is affected by many factors, among which the weaving volume ratio is the most sensitive.
- (4)
- In the formation and dissipation of traffic congestion, speed catastrophes will occur, but the corresponding traffic volume is different in the two cases.
- (5)
- This study only analyzed the internal causes of the evolution law of congestion formation and dissipation in a single weaving section. It did not consider external factors such as congestion in related road sections, which can be investigated in a future study.
Author Contributions
Funding
Conflicts of Interest
References
- Greenshields, B.D. A Study of Traffic Capacity. Highw. Res. Board Proc. 1935, 14, 448–477. [Google Scholar]
- Lighthill, M.J.; Whitham, G.B. On Kinematic Waves II. A Theory of Traffic Flow on Long Crowded Roads. Proc. R. Soc. London. Ser. A. Math. Phys. Sci. 1955, 229, 317–345. [Google Scholar]
- Richards, P.I. Shock Waves on the High way. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Hao, J.; Qu, D.Y.; Zhang, J.L.; Guo, T.; Wang, H. Analysis method of traffic flow characteristics based on molecular dynamics. J. Qingdao Technol. Univ. 2013, 34, 87–91, 124. [Google Scholar]
- Zhang, B.; Zhao, H.Y. Parameter correlation analysis and research on single-lane cellular automaton NS model. J. Kunming Univ. Sci. Technol. 2016, 41, 45–51. [Google Scholar]
- Wang, Y.; Chu, X.; Zhou, C.; Jia, B.; Lin, S.; Wu, Z.; Zhu, H.; Gao, Z. Evolvement law of a macroscopic traffic model accounting for density-dependent relaxation time. Mod. Phys. Lett. B 2017, 31, 1750291. [Google Scholar] [CrossRef]
- Hattam, L. Travelling wave solutions of the perturbed mKdV equation that represent traffic congestion. Wave Motion 2018, 79, 57–72. [Google Scholar] [CrossRef] [Green Version]
- Younes, M.B.; Boukerche, A. A performance evaluation of an efficient traffic congestion detection protocol (ECODE) for intelligent transportation systems. Ad Hoc Netw. 2015, 24, 317–336. [Google Scholar] [CrossRef]
- Fei, W.P.; Song, G.H.; Zhang, F.; Gao, Y.; Yu, L. Practical approach to determining traffic congestion propagation boundary due to traffic incidents. J. Cent. South Univ. 2017, 24, 413–422. [Google Scholar] [CrossRef]
- Li, S.B.; Fu, B.B.; Sun, T.; Dang, W. Research on complex network mesoscopic traffic flow with dynamic limit speed control strategies. Complex Syst. Complex. Sci. 2017, 14, 32–42. [Google Scholar]
- Hu, J.R.; He, L. Freeway traffic flow condition criterion method based on cusp catastrophe theory. China J. Highw. Transp. 2017, 30, 137–144. [Google Scholar]
- Ghadami, A.; Epureanu, B.I. Forecasting the Onset of Traffic Congestions on Circular Roads. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1196–1205. [Google Scholar] [CrossRef]
- Shao, Z.Y.; Zhang, L.; Wu, H. Evolution of urban traffic state based on cusp catastrophe. J. North China Univ. Sci. Technol. 2021, 43, 74–80. [Google Scholar]
- Chaurasia, B.K.; Manjoro, W.S.; Dhakar, M. Traffic congestion identification and reduction. Wirel. Pers. Commun. 2020, 114, 1267–1286. [Google Scholar] [CrossRef]
- Lin, L.; Chen, J.; Qu, D.Y.; Hei, K.; Han, L.; Bing, Q. Study on traffic state identification method based on K-means clustering algorithm. J. Qingdao Technol. Univ. 2019, 40, 109–114. [Google Scholar]
- Liu, C.M.; Juang, J.C. Estimation of Lane-Level Traffic Flow Using a Deep Learning Technique. Appl. Sci. 2021, 11, 5619. [Google Scholar] [CrossRef]
- Gao, C.; Wang, J.F.; Lu, X.; Chen, X. Urban Traffic Congestion State Recognition Supporting Algorithm Research on Vehicle Wireless Positioning in Vehicle–Road Cooperative Environment. Appl. Sci. 2022, 12, 770. [Google Scholar] [CrossRef]
- Thom, R. Catastrophe theory. Nature 1977, 270, 658. [Google Scholar] [CrossRef] [Green Version]
- Navin, F.P.D. Traffic congestion catastrophes. Transp. Plan. Technol. 1986, 11, 19–25. [Google Scholar] [CrossRef]
- Huang, Y.G.; Zhang, H.M.; Liu, H.J.; Zhang, S. An Analysis of the Catastrophe Model and Catastrophe Characteristics of Traffic Flow Based on Cusp Catastrophe Theory. J. Adv. Transp. 2022, 2022, 2837338. [Google Scholar] [CrossRef]
- Zeng, J.W.; Qian, Y.S.; Yu, S.B.; Wei, X.T. Research on critical characteristics of highway traffic flow based on three phase traffic theory. Phys. A Stat. Mech. Its Appl. 2019, 530, 121567. [Google Scholar] [CrossRef]
- Hall, F.L. An interpretation of speed-flow-concentration relationships using catastrophe theory. Transp. Res. Part A Gen. 1987, 21, 191–201. [Google Scholar] [CrossRef]
- Herrera, J.C.; Work, D.B.; Herring, R.; Ban, X.J.; Jacobson, Q.; Bayen, A.M. Evaluation of traffic data obtained via GPS-enabled mobile phones: The Mobile Century field experiment. Transp. Res. Part C 2010, 18, 568–583. [Google Scholar] [CrossRef] [Green Version]
- Carli, R.; Dotoli, M.; Epicoco, N.; Angelico, B.; Vinciullo, A. Automated Evaluation of Urban Traffic Congestion Using Bus as a Probe. In Proceedings of the IEEE International Conference on Automation Science & Engineering, Gothenburg, Sweden, 24–28 August 2015; pp. 967–972. [Google Scholar]
- Filipovska, M.; Mahmassani, H.S. Traffic Flow Breakdown Prediction using Machine Learning Approaches. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 560–570. [Google Scholar] [CrossRef]
- Yang, S.Y.; Wu, J.P.; Qi, G.Q.; Tian, K. Analysis of traffic state variation patterns for urban road network based on spectral clustering. Adv. Mech. Eng. 2017, 9, 1687814017723790. [Google Scholar] [CrossRef]
- Geng, Y.L.A. Research on Clustering Algorithm for Clusters with Irregular Structure; Beijing Jiaotong University: Beijing, China, 2021. [Google Scholar]
- Wu, W.T.; Jin, W.Z.; Lin, P.Q. The method of traffic state identification based on BP neural network. J. Transp. Inf. Saf. 2011, 29, 71–74. [Google Scholar]
- Fang, L.X.; Wei, L.Y.; Yan, W.Y. Prediction of traffic congestion based on decision tree. J. Hebei Univ. Technol. 2011, 29, 71–74. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detector Number | Measured Speed (km/h) | Simulated Speed (km/h) | Relative Error (%) | Measured Speed (km/h) | Simulated Speed (km/h) | Relative Error (%) |
|---|---|---|---|---|---|---|
| 1 | 69.31 | 71.13 | 2.63 | 1386 | 1296 | 6.49 |
| 2 | 70.58 | 71.52 | 1.33 | 1601 | 1546 | 3.44 |
| 3 | 68.14 | 69.96 | 2.67 | 1518 | 1403 | 7.58 |
| Average value | 69.34 | 70.87 | 2.21 | 1502 | 1415 | 5.83 |
| Detector Number | Measured Speed (km/h) | Simulated Speed (km/h) | Relative Error (%) | Measured Speed (km/h) | Simulated Speed (km/h) | Relative Error (%) |
|---|---|---|---|---|---|---|
| 1 | 25.94 | 26.78 | 3.24 | 2625 | 2473 | 5.79 |
| 2 | 20.13 | 20.72 | 2.02 | 2268 | 2197 | 3.13 |
| 3 | 18.63 | 19.16 | 2.84 | 2016 | 1876 | 6.94 |
| Average value | 21.63 | 22.22 | 2.70 | 2303 | 2182 | 5.29 |
| Experimental Scheme | Experimental Parameters | Initial Value | Final Value | Increment | Remark |
|---|---|---|---|---|---|
| 1 | Weaving volume ratio | 0.05 | 0.35 | 0.1 | Each group of experiments was only carried out according to the initial value, final value, and increment of the group, while the other parameters remained unchanged. |
| 2 | Length of weaving section (m) | 150 | 750 | 150 | |
| 3 | Number of lanes | 2 | 4 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, D.; Liu, H.; Song, H.; Meng, Y. Extraction of Catastrophe Boundary and Evolution of Expressway Traffic Flow State. Appl. Sci. 2022, 12, 6291. https://doi.org/10.3390/app12126291
Qu D, Liu H, Song H, Meng Y. Extraction of Catastrophe Boundary and Evolution of Expressway Traffic Flow State. Applied Sciences. 2022; 12(12):6291. https://doi.org/10.3390/app12126291
Chicago/Turabian StyleQu, Dayi, Haomin Liu, Hui Song, and Yiming Meng. 2022. "Extraction of Catastrophe Boundary and Evolution of Expressway Traffic Flow State" Applied Sciences 12, no. 12: 6291. https://doi.org/10.3390/app12126291
APA StyleQu, D., Liu, H., Song, H., & Meng, Y. (2022). Extraction of Catastrophe Boundary and Evolution of Expressway Traffic Flow State. Applied Sciences, 12(12), 6291. https://doi.org/10.3390/app12126291