
A Decision System for Routing Problems and Rescheduling Issues Using Unmanned Aerial Vehicles

Abstract
:1. Introduction
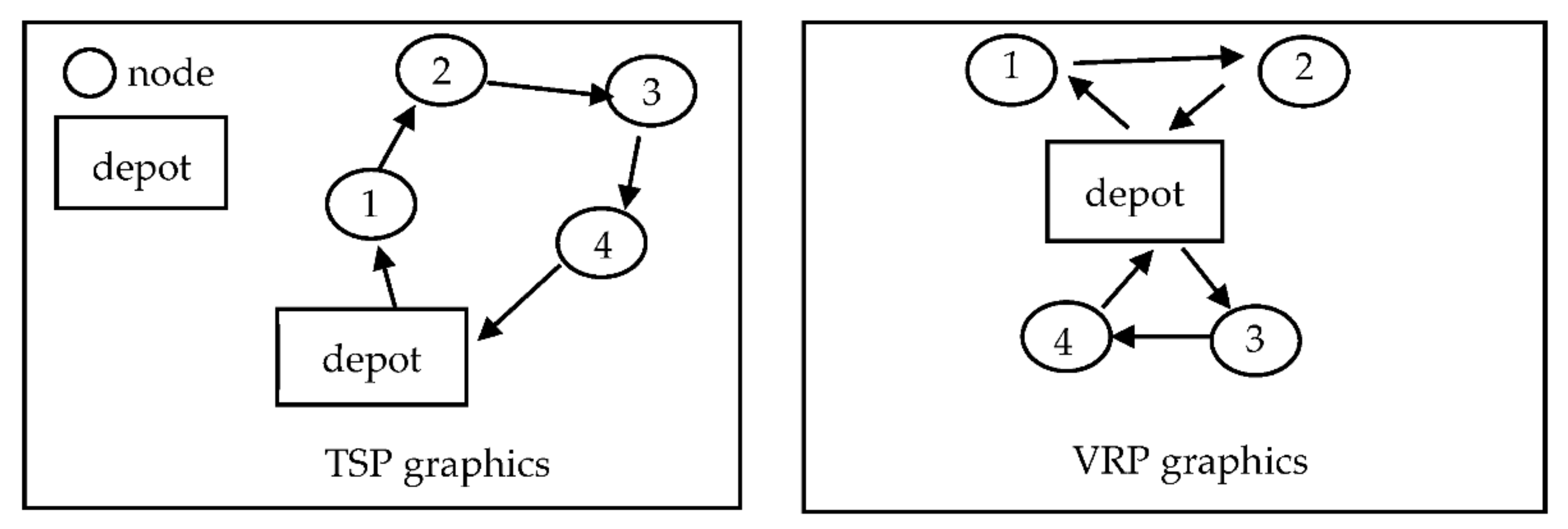
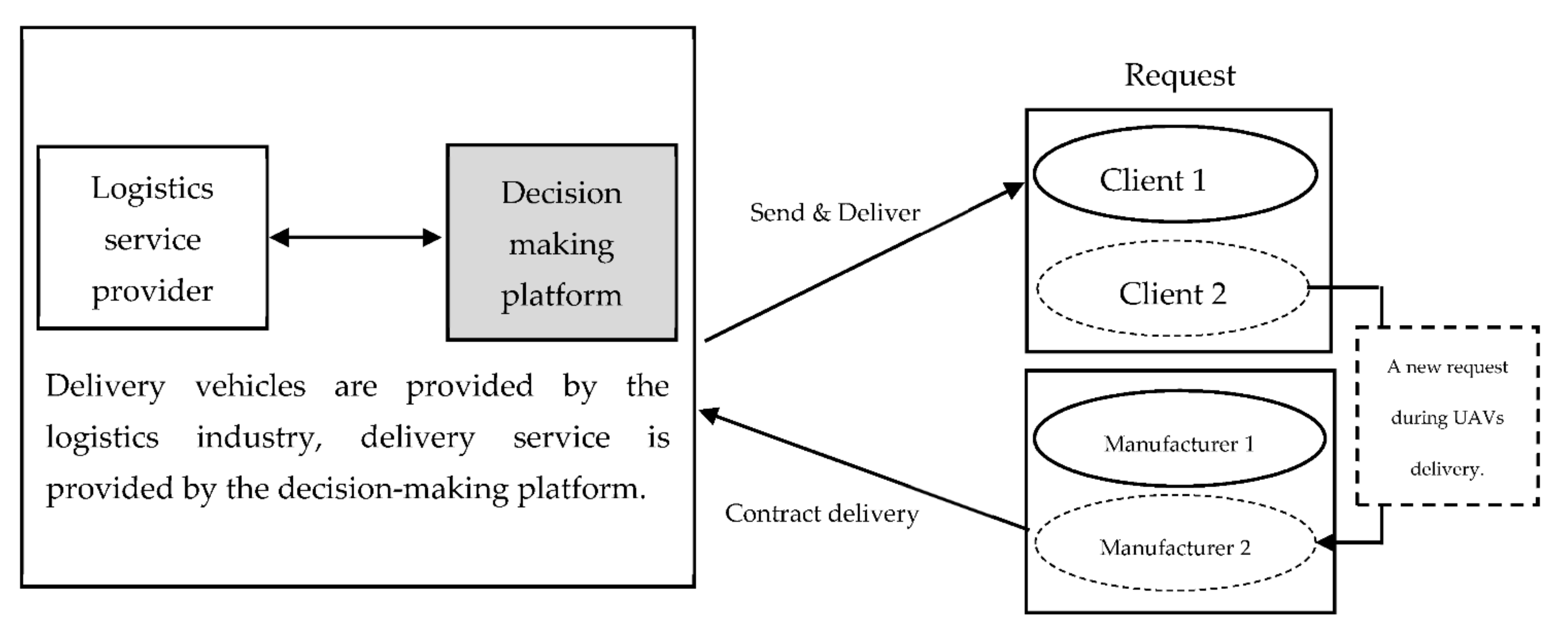
2. Problem Description of This Study
3. Mathematical Model of This Study
3.1. Symbols
3.2. Hypothesis
- There is only one UAV involved;
- The operating time of the UAV is inversely proportional to the load weight; the heavier the load weight of the UAV, the shorter the operating time;
- The service time that the UAV spends on each customer will not be a focus;
- The delivery route is fixed;
- The impact of weather, buildings, or UAV malfunctions on the operating route and speed of the unmanned vehicle will not be considered;
- Once the load weight of the UAV is confirmed in the distribution center, the operating time will be confirmed, and will not increase due to the real-time decreasing load weight during delivery;
- The speed is constant; it will not change due to load requests, number of requests, or operating time;
- The UAV can serve many customers; each customer, however, can only be served once;
- The locations of the UAV and customer are known;
- We assume that the UAV is departing from the logistics center;
- Customer requirements will not change and are known;
- The UAV will return to the logistics center after delivery;
- The load weight carried is inversely proportional to the greatest load weight of the UAV;
- The UAV which departs from the logistics center is completely in-tact, everything runs well, and the UAV comes with a full tank of gas/fully charged battery.
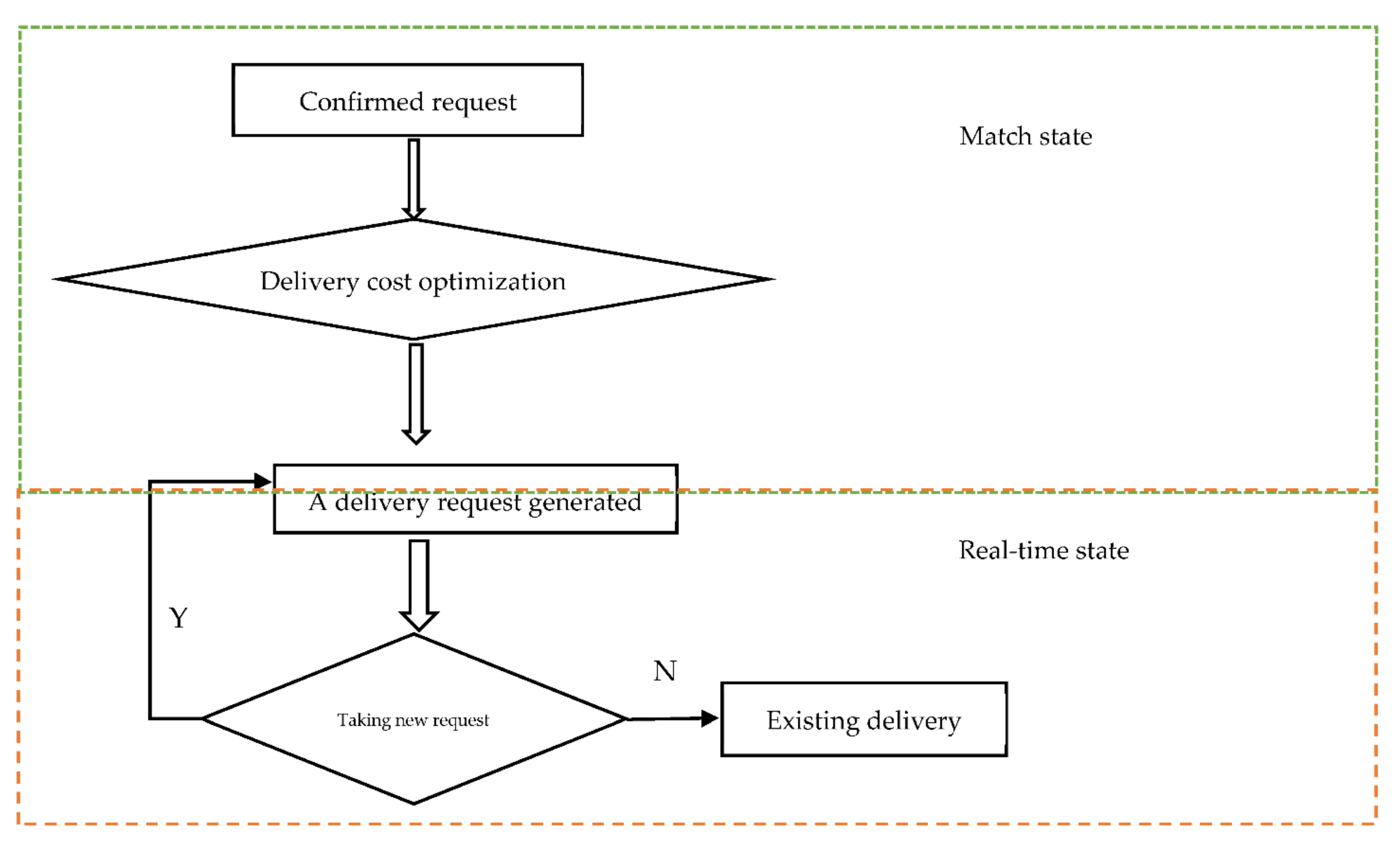
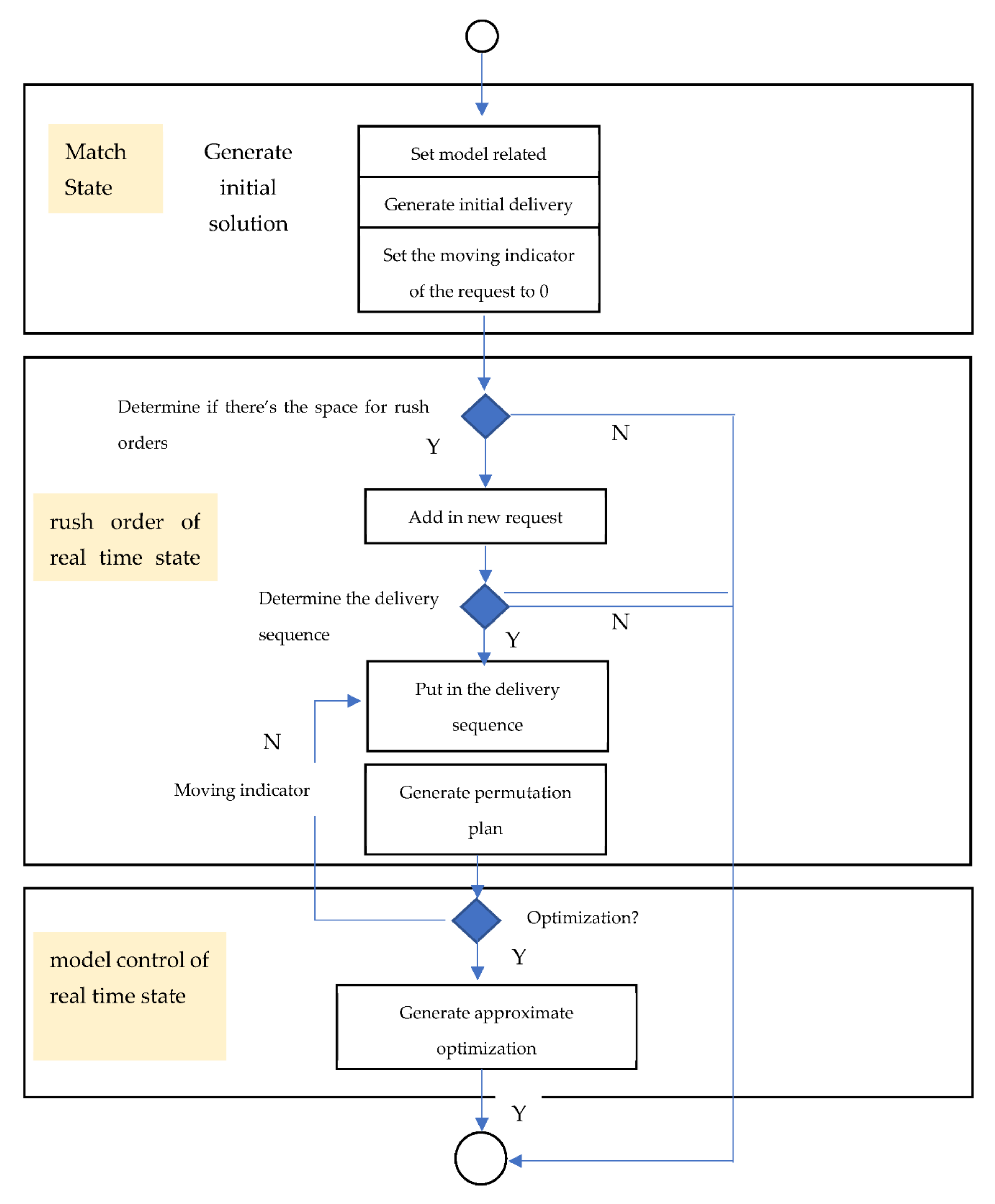
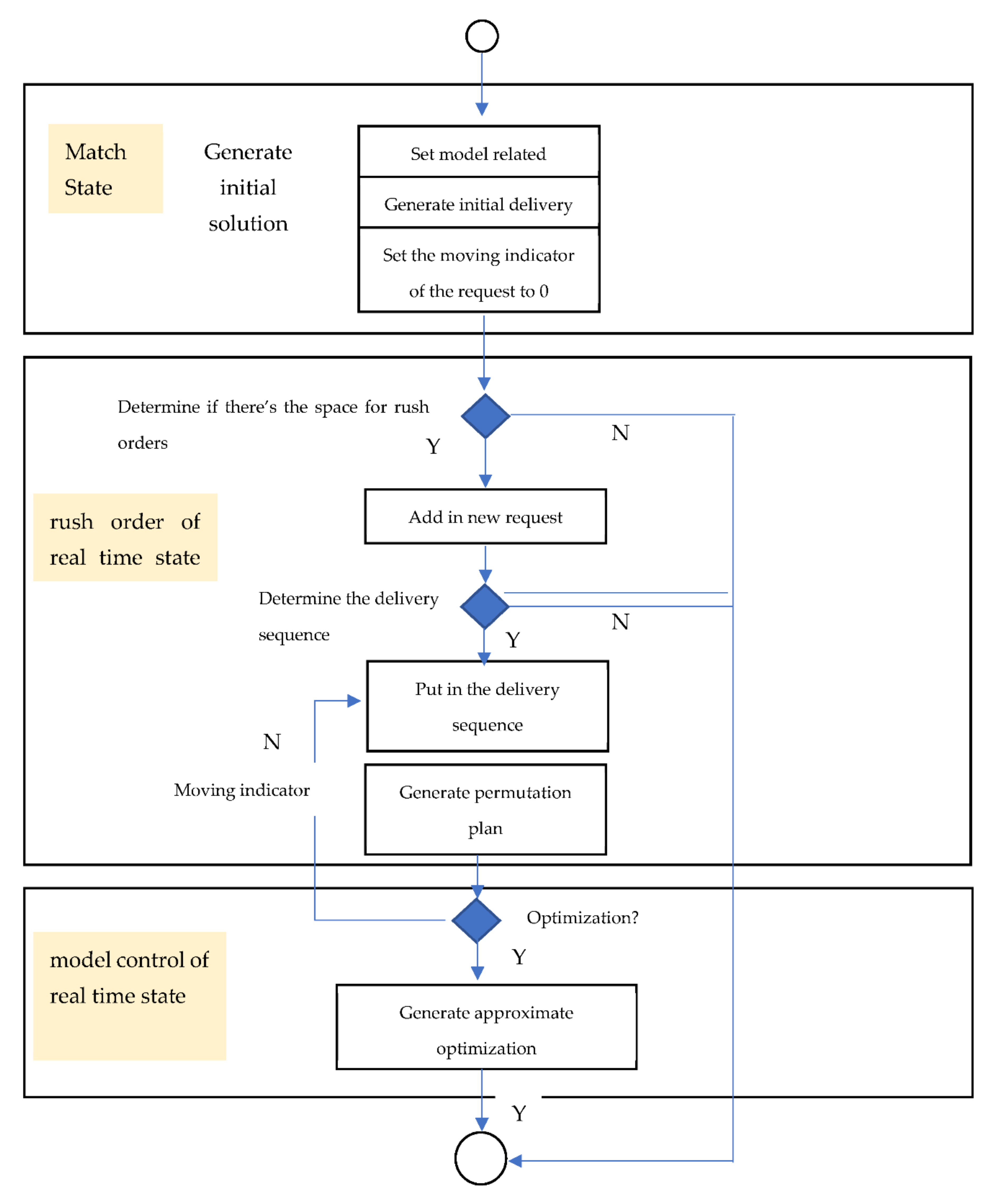
3.3. Decision of the Heuristic Algorithm
- Generate random feasible routes.
- Process reproduction on the selected shorter routes.
- Pair individuals, chose two nodes randomly, and check the existence of the travel route. A certain subsequent route can be reversed to achieve the result of mutation if nodes conflict.
- Generate a new plan (offspring Routes + mutation Routes).
- Determine that the vehicle still has space for rush requests if the solution of the match state were satisfied; scheduling should be ended if the vehicle does not have the capacity for new requests.
- Compute the algorithm to increase revenue and consider customer reception for early or late delivery.
- Establish corresponding feasible routes for every possible backup schedule.
- Apply the optimal cost computed in model control of the real-time state as the initial price and calculate every feasible route. If no optimal solution can be computed, recalculate again using the rush request step of the real-time state model evolution.
- Select the best solution, with minimum operating and delay costs.
4. Case Study
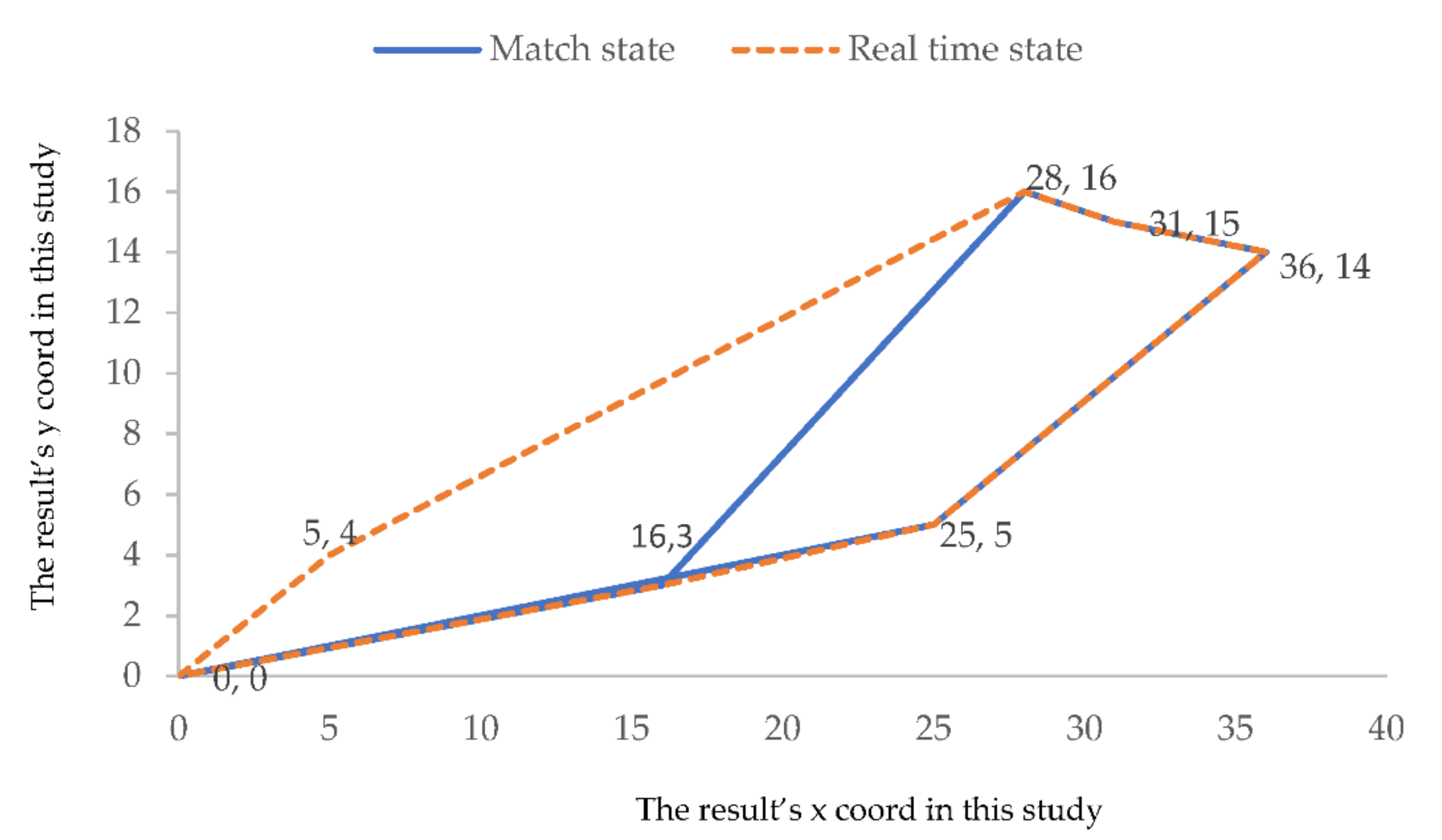
4.1. The Result of the Study
4.2. Sensitivity Analysis
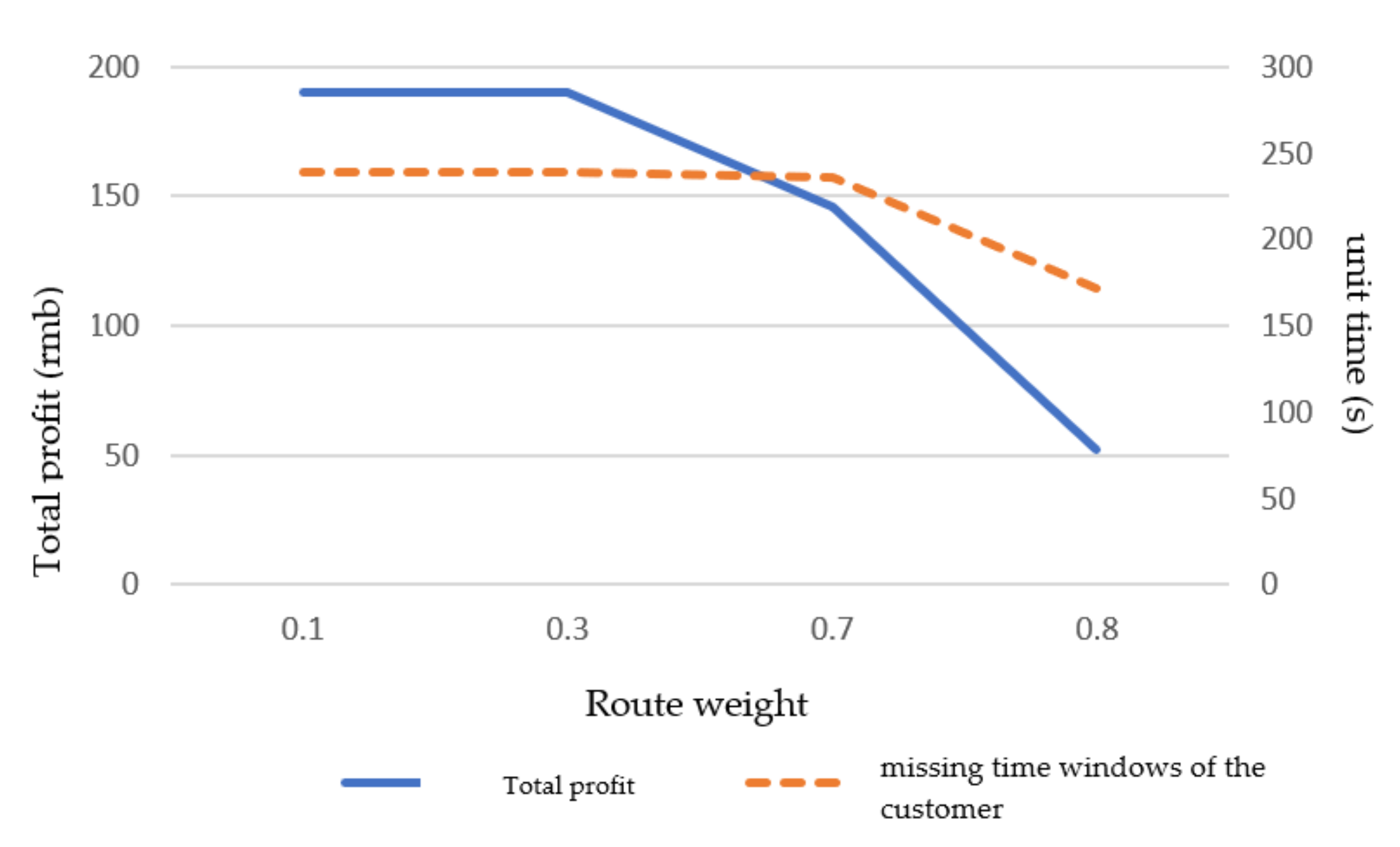
- The logistics service providers decided to increase the weight of customer satisfaction to achieve the least missed time windows. Because the time window of the request around the logistics center does not have a fixed changing trend, the shortest route distance will constantly fluctuate.
- While increasing the weight of the shortest route can decrease the missed time windows, it will lower the profit at the same time. The logistics service providers will only receive a new request that is near the logistic center.
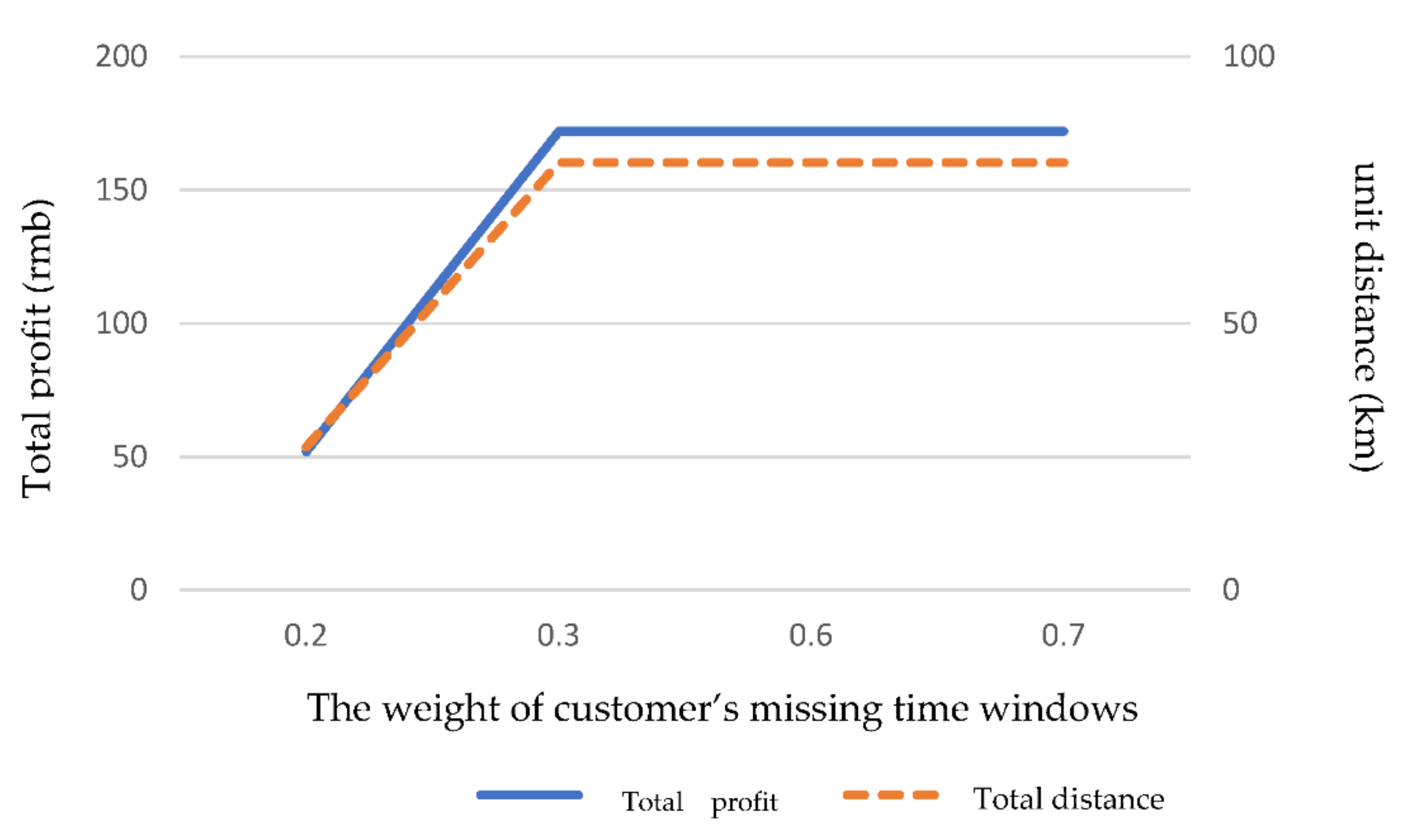
- The profit and total route distance increase along with the increased missed time window weight. This is mean that the logistics service provider can receive the new request when the customer can accept a delay in their request.
5. Conclusions and Recommendation
Author Contributions
Funding
Conflicts of Interest
Appendix A. Random Table of the Weight of the Demand
| 03 47 43 73 86 | 36 96 47 36 61 | 46 98 63 71 62 | 33 26 16 80 45 | 60 11 14 10 95 |
| 97 74 24 67 62 | 42 81 14 57 20 | 42 53 32 37 32 | 27 07 36 07 51 | 24 51 79 89 73 |
| 16 76 62 27 66 | 56 50 26 71 07 | 32 90 79 78 53 | 13 55 38 58 59 | 88 97 54 14 10 |
| 12 56 85 99 26 | 96 96 68 27 31 | 05 03 72 93 15 | 57 12 10 14 21 | 88 26 49 81 76 |
| 55 59 56 35 64 | 38 51 82 46 22 | 31 62 43 09 90 | 06 18 44 32 53 | 23 83 01 30 30 |
| 16 22 77 94 39 | 49 54 43 54 82 | 17 37 93 23 78 | 87 35 20 96 43 | 84 26 34 91 64 |
| 84 42 17 53 31 | 57 24 55 06 88 | 77 04 74 17 67 | 21 76 33 50 25 | 83 92 12 06 76 |
| 63 01 63 78 59 | 16 95 55 67 19 | 98 10 50 71 75 | 12 86 73 58 07 | 44 39 52 38 79 |
| 33 21 12 34 29 | 78 64 56 07 82 | 52 42 07 44 38 | 15 51 00 13 42 | 99 66 02 79 54 |
| 57 60 86 32 44 | 09 47 27 96 54 | 49 17 46 09 62 | 90 52 84 77 27 | 08 02 73 43 28 |
| 18 18 07 92 45 | 44 17 16 58 09 | 79 83 86 19 62 | 06 76 50 03 10 | 55 23 64 05 05 |
| 26 62 38 97 75 | 84 16 07 44 99 | 83 11 46 32 24 | 20 14 85 88 45 | 10 93 72 88 71 |
| 23 42 40 64 74 | 82 97 77 77 81 | 07 45 32 14 08 | 32 98 94 07 72 | 93 85 79 10 75 |
| 52 36 28 19 95 | 50 92 26 11 97 | 00 56 76 31 38 | 80 22 02 53 53 | 86 60 42 04 53 |
| 37 85 94 35 12 | 83 39 50 08 30 | 42 34 07 96 88 | 54 42 06 87 98 | 35 85 29 48 39 |
| 70 29 !7 12 13 | 40 33 20 38 26 | 13 89 51 03 74 | 17 76 37 13 04 | 07 74 21 19 30 |
| 56 62 18 37 35 | 96 83 50 87 75 | 97 12 55 93 47 | 70 33 24 03 54 | 97 77 46 44 80 |
| 99 49 57 22 77 | 88 42 95 45 72 | 16 64 36 16 00 | 04 43 18 66 79 | 94 77 21 21 90 |
| 16 08 15 04 72 | 33 27 14 34 09 | 45 59 34 68 49 | 12 72 07 31 45 | 99 27 72 95 14 |
| 31 16 93 32 43 | 50 27 89 87 19 | 20 15 37 00 49 | 52 85 66 60 44 | 38 68 88 11 80 |
| 68 34 30 13 70 | 55 74 30 77 40 | 44 22 78 84 26 | 04 33 46 09 52 | 68 07 97 06 57 |
| 74 57 25 65 76 | 59 29 97 68 60 | 71 91 38 67 54 | 13 58 18 24 76 | 15 54 55 95 52 |
| 27 42 37 86 53 | 48 55 90 65 72 | 96 57 69 36 10 | 96 46 92 42 45 | 97 60 49 04 91 |
| 00 39 68 29 61 | 66 37 32 20 30 | 77 84 57 03 29 | 10 15 65 04 26 | 11 04 96 67 24 |
| 29 94 98 94 24 | 68 49 69 10 82 | 53 75 91 93 30 | 34 25 20 57 27 | 40 48 73 51 92 |
| 16 90 82 66 59 | 83 62 64 11 12 | 67 19 00 71 74 | 60 47 21 29 68 | 02 02 37 03 31 |
| 11 27 94 75 06 | 06 09 19 74 66 | 02 94 37 34 02 | 76 70 90 30 86 | 38 45 94 30 38 |
| 35 24 10 16 20 | 33 32 51 26 38 | 79 78 45 04 91 | 16 92 53 56 16 | 02 75 50 95 98 |
| 38 23 16 86 38 | 42 38 97 01 50 | 87 75 66 81 41 | 10 01 74 91 62 | 48 51 84 08 32 |
| 31 96 25 91 47 | 96 44 33 49 13 | 34 86 82 53 91 | 00 52 43 48 85 | 27 55 26 89 62 |
Appendix B. The Example (Customer Demand) of This Study
| !! n20w20.001 | ||||||
| CUST NO. | XCOORD | YCOORD | DEMAND | READY TIME | DUE DATE | SERVICE TIME |
| 1 | 16.00 | 23.00 | 0.00 | 0.00 | 408.00 | 0.00 |
| 2 | 22.00 | 4.00 | 0.00 | 62.00 | 68.00 | 0.00 |
| 3 | 12.00 | 6.00 | 0.00 | 181.00 | 205.00 | 0.00 |
| 4 | 47.00 | 38.00 | 0.00 | 306.00 | 324.00 | 0.00 |
| 5 | 11.00 | 29.00 | 0.00 | 214.00 | 217.00 | 0.00 |
| 6 | 25.00 | 5.00 | 0.00 | 51.00 | 61.00 | 0.00 |
| 7 | 22.00 | 31.00 | 0.00 | 102.00 | 129.00 | 0.00 |
| 8 | 0.00 | 16.00 | 0.00 | 175.00 | 186.00 | 0.00 |
| 9 | 37.00 | 3.00 | 0.00 | 250.00 | 263.00 | 0.00 |
| 10 | 31.00 | 19.00 | 0.00 | 3.00 | 23.00 | 0.00 |
| 11 | 38.00 | 12.00 | 0.00 | 21.00 | 49.00 | 0.00 |
| 12 | 36.00 | 1.00 | 0.00 | 79.00 | 90.00 | 0.00 |
| 13 | 38.00 | 14.00 | 0.00 | 78.00 | 96.00 | 0.00 |
| 14 | 4.00 | 50.00 | 0.00 | 140.00 | 154.00 | 0.00 |
| 15 | 5.00 | 4.00 | 0.00 | 354.00 | 386.00 | 0.00 |
| 16 | 16.00 | 3.00 | 0.00 | 42.00 | 63.00 | 0.00 |
| 17 | 25.00 | 25.00 | 0.00 | 2.00 | 13.00 | 0.00 |
| 18 | 31.00 | 15.00 | 0.00 | 24.00 | 42.00 | 0.00 |
| 19 | 36.00 | 14.00 | 0.00 | 20.00 | 33.00 | 0.00 |
| 20 | 28.00 | 16.00 | 0.00 | 9.00 | 21.00 | 0.00 |
| 21 | 20.00 | 35.00 | 0.00 | 275.00 | 300.00 | 0.00 |
| 999 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
References
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. Eur. J. Oper. Res. 2021, 294, 1078–1095. [Google Scholar] [CrossRef]
- Dingil, A.E.; Rupi, F.; Esztergár-Kiss, D. An integrative review of socio-technical factors influencing travel decision-making and urban transport performance. Sustainability 2021, 13, 10158. [Google Scholar] [CrossRef]
- Khosiawan, Y.; Park, Y.; Moon, I.; Nilakantan, J.M.; Nielsen, I. Task scheduling system for UAV operations in indoor environment. Neural Comput. Appl. 2019, 31, 5431–5459. [Google Scholar] [CrossRef] [Green Version]
- Chaibi, L.; Sebgui, M.; Bah, S. Unmanned Aerial Vehicles Against COVID-19 Pandemic: Main Applications and Limitations. In Proceedings of the 2021 IEEE 12th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Virtual, 27–30 October 2021. [Google Scholar]
- Sagar, M. How Drones Are Assisting Government in China Fight COVID-19. 2020. Available online: https://opengovasia.com/how-drones-are-assisting-government-in-china-fight-covid-19/ (accessed on 25 March 2022).
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Zhen, L.; Li, M.; Laporte, G.; Wang, W. A vehicle routing problem arising in unmanned aerial monitoring. Comput. Oper. Res. 2019, 105, 1–11. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned aerial vehicle routing problems: A literature review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Eichleay, M.; Evens, E.; Stankevitz, K.; Parker, C. Using the unmanned aerial vehicle delivery decision tool to consider transporting medical supplies via drone. Glob. Health Sci. Pract. 2019, 7, 500–506. [Google Scholar] [CrossRef] [Green Version]
- Schwarzrock, J.; Zacarias, I.; Bazzan, A.L.; de Araujo Fernandes, R.Q.; Moreira, L.H.; de Freitas, E.P. Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence. Eng. Appl. Artif. Intell. 2018, 72, 10–20. [Google Scholar] [CrossRef]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. A Stat. Mech. Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Euchi, J.; Sadok, A. Hybrid genetic-sweep algorithm to solve the vehicle routing problem with drones. Phys. Commun. 2021, 44, 101236. [Google Scholar] [CrossRef]
- Ozkan, O.; Atli, O. Transporting COVID-19 testing specimens by routing unmanned aerial vehicles with range and payload constraints: The case of Istanbul. Transp. Lett. 2021, 13, 482–491. [Google Scholar] [CrossRef]
- Gigante, G.; Pascarella, D.; Luongo, S.; Di Benedetto, C.; Vozella, A.; Persechino, G. Game-theoretic approach for the optimal configuration computing of an interoperable fleet of unmanned vehicles. Expert Syst. 2018, 35, e12293. [Google Scholar] [CrossRef]
- Chen, Q.; Deng, L.F.; Wang, H.M. Optimization of multi-task job-shop scheduling based on uncertainty theory algorithm. Int. J. Simul. Model. 2018, 17, 543–552. [Google Scholar] [CrossRef]
- Dewa, M.T.; van der Merwe, A.F.; Matope, S. A holonic approach to reactive scheduling when rush orders emerge. In Proceedings of the International Conference on Competitive Manufacturing, Stellenbosch, South Africa, 27–29 January 2016. [Google Scholar]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–122. [Google Scholar] [CrossRef]
- Aqlan, F.; Ahmed, A.; Ashour, O.; Shamsan, A.; Hamasha, M.M. An approach for rush order acceptance decisions using simulation and multi-attribute utility theory. Eur. J. Ind. Eng. 2017, 11, 613–630. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Zacharias, C.; Pinedo, M. Managing customer arrivals in service systems with multiple identical servers. Manuf. Serv. Oper. Manag. 2017, 19, 639–656. [Google Scholar] [CrossRef]
- Liu, W.; Jin, Y.; Price, M. New scheduling algorithms and digital tool for dynamic permutation flow-shop with newly arrived order. Int. J. Prod. Res. 2017, 55, 3234–3248. [Google Scholar] [CrossRef] [Green Version]
- Baykasoğlu, A.; Karaslan, F.S. Solving comprehensive dynamic job shop scheduling problem by using a GRASP-based approach. Int. J. Prod. Res. 2017, 55, 3308–3325. [Google Scholar] [CrossRef]
- Yin, L.; Gao, L.; Li, X.; Xia, H. An improved genetic algorithm with rolling window technology for dynamic integrated process planning and scheduling problem. In Proceedings of the 2017 IEEE 21st International Conference on Computer Supported Cooperative Work in Design (CSCWD), Wellington, New Zealand, 26–28 April 2017. [Google Scholar]
- Zhang, L.; Wong, T.N. An object-coding genetic algorithm for integrated process planning and scheduling. Eur. J. Oper. Res. 2015, 244, 434–444. [Google Scholar] [CrossRef]
- Chaudhry, I.A.; Usman, M. Integrated process planning and scheduling using genetic algorithms. Teh. Vjesn.-Tech. Gaz. 2017, 24, 1401–1409. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Subcategory | Authors |
|---|---|---|
| heuristic algorithm | particle swarm optimization (PSO) | Khosiawan et al. [4] |
| tabu search | Zhen et al. [8] | |
| genetic-sweep algorithm | Euchi and Sadok [13] | |
| mixed-integer linear programming | Ozkan and Atli [14] | |
| swarm intelligence | Schwarzrock et al. [11] | |
| Game theory | Gigante et al. [15] |
| Dimension | Factors | Authors |
|---|---|---|
| Operation time | Customer due date, customer service time, processing time, setup time, release date, ready time, and idle time | Chen et al. [16], Dewa et al. [17] |
| Organization | Leadership, development process of the system, and governance | Barmponuakis et al. [18], Eichleay et al. [10] |
| UAVs | Robust wireless communication, three-dimensional trajectory data, precise UAV control, weather conditions, air traffic control, fuel consumption, and service range, socio-technical | Khosiawan et al. [4], Thibbotuwawa et al. [9], Dingil et al. [3] |
| Decision Variable | Description |
|---|---|
| The binary variable of 0 or 1 0: other situations, 1: unmanned vehicle i travels from j to jk | |
| Parameter definition | |
| The weight of logistics service provider’s profit | |
| The weight of the total distance | |
| The weight of penalty | |
| Unmanned vehicles with different models and capacities, i = 1…, D; we assumed that it was only one in this study | |
| j | Customer in match state, j = 1…, C |
| jk | Customer in the real-time state, jk = 1…, C |
| Customer number (a big constant); we assumed that it was 999 in this study | |
| Delivery price (Fees charged by logistics service providers to customers) | |
| The capacity of unmanned vehicles i | |
| Fixed travel cost of unmanned vehicles i | |
| Variable travel cost of unmanned vehicles i | |
| The initial time of unmanned vehicle i; we assumed that it was 0 in this study | |
| Maximum travel time of unmanned vehicle i | |
| Customer j’s requirement | |
| Customer’s rush requirements in real-time | |
| The load of the unmanned vehicle is inversely proportional to the flight time | |
| Unit distance from the customer in real-time state | |
| The unit distance required speed of unmanned vehicle i | |
| The early fees of an unmanned vehicle arriving before the start of customer j’s time window | |
| The delay fees of an unmanned vehicle arriving after the end of customer j’s time window | |
| The fees of the unmanned vehicle | |
| Total operating time of unmanned vehicle i | |
| The time arrived the customer in the real-time state of the unmanned vehicle (a-arrive) | |
| Time window lower limit of customer in real-time state | |
| Time window upper limit of the customer in the real-time state (b-begin; e-end) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, I.-C.; Lin, T.-H.; Chang, S.-H. A Decision System for Routing Problems and Rescheduling Issues Using Unmanned Aerial Vehicles. Appl. Sci. 2022, 12, 6140. https://doi.org/10.3390/app12126140
Lin I-C, Lin T-H, Chang S-H. A Decision System for Routing Problems and Rescheduling Issues Using Unmanned Aerial Vehicles. Applied Sciences. 2022; 12(12):6140. https://doi.org/10.3390/app12126140
Chicago/Turabian StyleLin, I-Ching, Tsan-Hwan Lin, and Sheng-Hung Chang. 2022. "A Decision System for Routing Problems and Rescheduling Issues Using Unmanned Aerial Vehicles" Applied Sciences 12, no. 12: 6140. https://doi.org/10.3390/app12126140
APA StyleLin, I.-C., Lin, T.-H., & Chang, S.-H. (2022). A Decision System for Routing Problems and Rescheduling Issues Using Unmanned Aerial Vehicles. Applied Sciences, 12(12), 6140. https://doi.org/10.3390/app12126140